Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Skeltrack - Open Source Skeleton Tracking
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Joaquim Rocha
May 26, 2012
Programming
0
190
Skeltrack - Open Source Skeleton Tracking
Presentation of Skeltrack -- the only Open Source library for skeleton tracking.
Joaquim Rocha
May 26, 2012
Tweet
Share
More Decks by Joaquim Rocha
See All by Joaquim Rocha
Git: Best Practices
jrocha
3
3.8k
Skeltrack: Open Source Skeleton Tracking
jrocha
1
200
OCRFeeder: OCR Made Easy on GNOME
jrocha
1
320
Introduction to Django
jrocha
5
3.8k
Skeltrack: Open Source Skeleton Tracking
jrocha
1
3.1k
Other Decks in Programming
See All in Programming
MUSUBIXとは
nahisaho
0
140
並行開発のためのコードレビュー
miyukiw
0
1.1k
AIフル活用時代だからこそ学んでおきたい働き方の心得
shinoyu
0
140
AIによる高速開発をどう制御するか? ガードレール設置で開発速度と品質を両立させたチームの事例
tonkotsuboy_com
7
2.4k
React 19でつくる「気持ちいいUI」- 楽観的UIのすすめ
himorishige
11
7.5k
humanlayerのブログから学ぶ、良いCLAUDE.mdの書き方
tsukamoto1783
0
200
CSC307 Lecture 10
javiergs
PRO
1
660
【卒業研究】会話ログ分析によるユーザーごとの関心に応じた話題提案手法
momok47
0
200
AI巻き込み型コードレビューのススメ
nealle
2
1.2k
それ、本当に安全? ファイルアップロードで見落としがちなセキュリティリスクと対策
penpeen
7
4k
Patterns of Patterns
denyspoltorak
0
1.4k
CSC307 Lecture 02
javiergs
PRO
1
780
Featured
See All Featured
職位にかかわらず全員がリーダーシップを発揮するチーム作り / Building a team where everyone can demonstrate leadership regardless of position
madoxten
58
50k
30 Presentation Tips
portentint
PRO
1
220
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
110
HU Berlin: Industrial-Strength Natural Language Processing with spaCy and Prodigy
inesmontani
PRO
0
230
XXLCSS - How to scale CSS and keep your sanity
sugarenia
249
1.3M
For a Future-Friendly Web
brad_frost
182
10k
Noah Learner - AI + Me: how we built a GSC Bulk Export data pipeline
techseoconnect
PRO
0
110
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.6k
A Modern Web Designer's Workflow
chriscoyier
698
190k
My Coaching Mixtape
mlcsv
0
49
The Web Performance Landscape in 2024 [PerfNow 2024]
tammyeverts
12
1k
ラッコキーワード サービス紹介資料
rakko
1
2.3M
Transcript
Skeltrack - Open Source Skeleton Tracking Joaquim Rocha, Igalia LinuxTag
2012 - Wunderbare Berlin
Guten Tag! ✩ I am a developer at Igalia ✩
I like doing innovative stuff like OCRFeeder and SeriesFinale ✩ and today I am presenting my latest project: Skeltrack
The Kinect
Microsoft's Kinect was the first camera with a price affordable
to the public
The USB connection is open and thus hackable
This originated Open Source projects like the libfreenect, a library
to control the Kinect device and get its information
We created a GLib wrapper for libfreenect called GFreenect
GFreenect offers asynchronous functions (and some synchronous as well) and
makes it easy to use with other GNOME technologies
GObject Introspection = free bindings (Python, Javascript, Vala)
Kinect has a structured light camera which gives depth information
But that's raw information... values from 0-2048
libfreenect/GFreenect can give those values in mm
None
Still...
It does NOT tell you there is a person in
the picture
Or a cow
Or an ampelmann
Let alone a skeleton and where its joints are
For this you need a skeleton tracking solution
Three proprietary/closed solutions exist:
Microsoft Kinect SDK: non-commercial only
OpenNI: commercial compatible
Kinect for Windows: commercial use allowed but incompatible with the
XBox's Kinect
None
Conclusion: There were no Free solutions to perform skeleton tracking...
:(
So Igalia built one!
Enter Skeltrack
What we wanted: ✩ A shared library, no fancy SDK
✩ Device independent ✩ No pattern matching, no databases ✩ Easy to use (everybody wants that!)
Not as easy as it sounds!
After some investigation we found Andreas Baak's paper "A Data-Driven
Approach for Real-Time Full Body Pose Reconstruction from a Depth Camera"
However this paper uses a database of poses to get
what the user is doing
So we based only part of our work on it
How does it work?
First we need to find the extremas
Make a graph whose nodes are the depth pixels
Connect two nodes if the distance is less than a
certain value
Connect the different graph's components by using connected-component labeling
Choose a starting point and calculate Dijkstra to each point
of the graph; choose the furthest point. There you got your extrema!
Then create an edge between the starting point and the
current extrema point with 0 cost and repeat the same process now using the current extrema as a starting point.
This comes from Baak's paper and the difference starts here:
choosing the starting point
Baak chooses a centroid as the starting point We choose
the bottom-most point starting from the centroid (this showed better results for the upper body extremas)
So we got ourselves some extremas! What to do with
them?
What extrema is a hand, a head, a shoulder?
For that we use educated guesses...
We calculate 3 extremas
Then we check each of them hoping they are the
head
How?
For each extrema we look for the points in places
where the shoulders should be, checking their distances between the extrema and between each other.
If they obey those rules then we assume they are
the head'n'shoulders (tm)
With the remaining 2 extremas, we will try to see
if they are elbows or hands
How to do it?
Calculate Dijkstra from the shoulders to each extrema
The closest extrema to any of the shoulders is either
a hand of an elbow of that shoulder
How to check if it's a hand or an elbow?
If the distance between the extrema and the shoulder is
less than a predefined value, then it is an elbow. Otherwise it is a hand.
If it is a hand, we find the elbow by
choosing the first point (in the path we created with Dijkstra before) whose distance exceeds the elbow distance mentioned before
None
There is still some things missing...
Future work
Hands from elbows: If one of the extremas is an
elbow, we need to infer where the hand is
Smoothing: Smooth the jittering of the joints
Robustness: Use restrictions to ignore objects that are not the
user
Multi-user: Track more than one person at a time
And of course, get the rest of the joints: hips,
knees, etc.
How to use it?
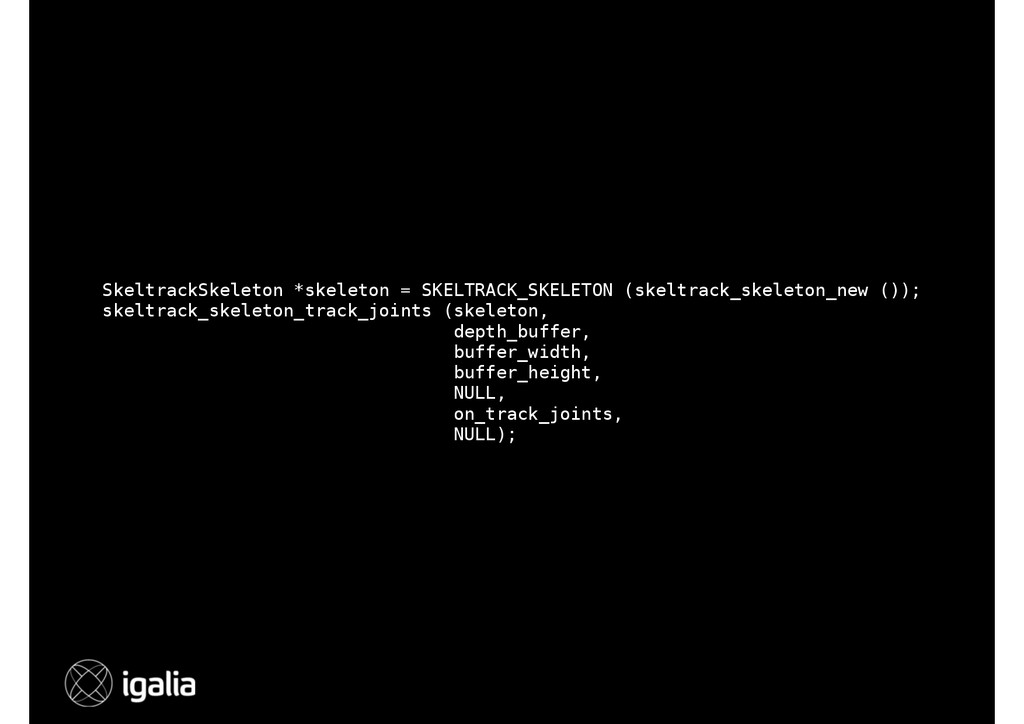
Asynchronous API
SkeltrackSkeleton *skeleton = SKELTRACK_SKELETON (skeltrack_skeleton_new ()); skeltrack_skeleton_track_joints (skeleton, depth_buffer, buffer_width,
buffer_height, NULL, on_track_joints, NULL);
None
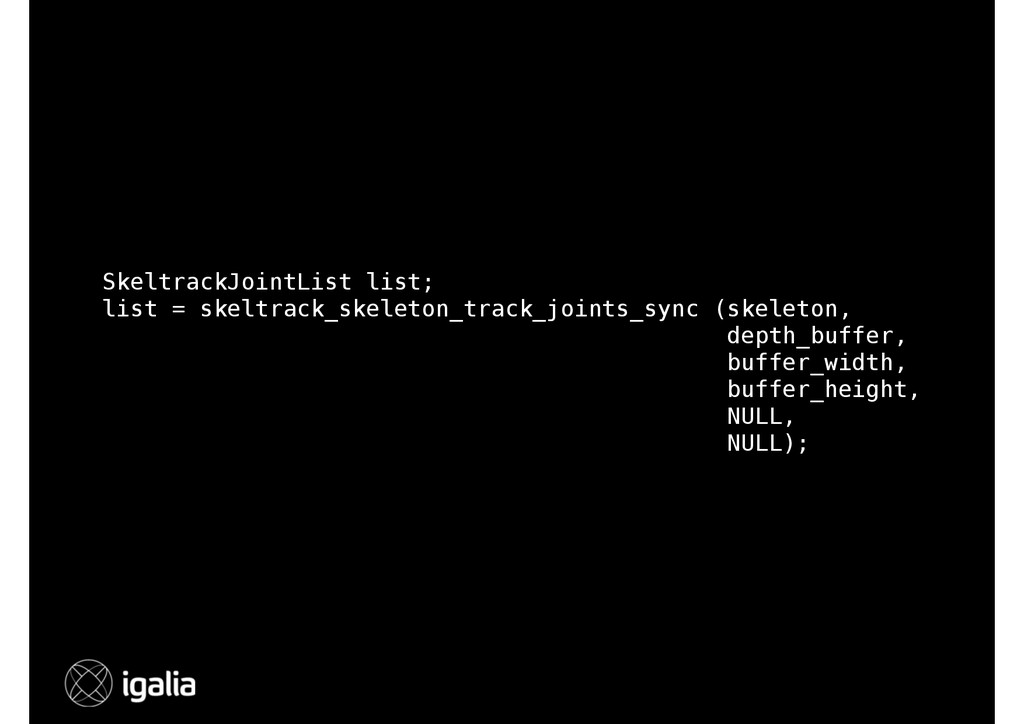
Synchronous API
SkeltrackJointList list; list = skeltrack_skeleton_track_joints_sync (skeleton, depth_buffer, buffer_width, buffer_height, NULL,
NULL);
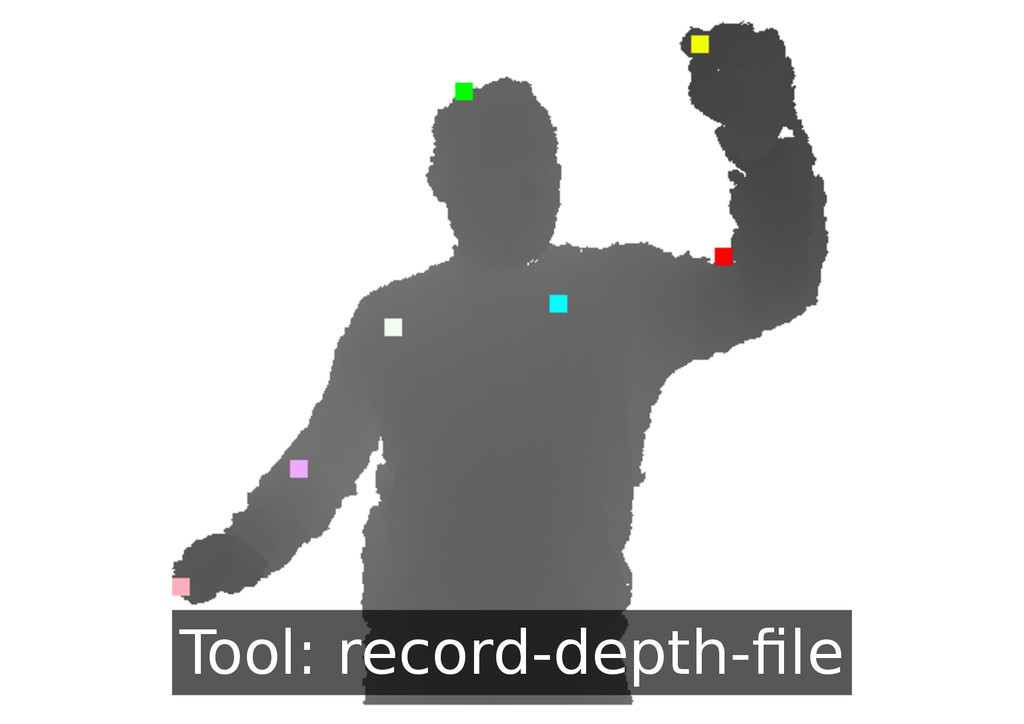
Skeleton Joint: ID: HEAD, LEFT_ELBOW, RIGHT_HAND, ... x: X coordinate
in real world (in mm) y: Y coordinate in real world (in mm) screen_x: X coordinate in the screen (in pixels) screen_y: Y coordinate in the screen (in pixels)
Code/Bugs: https://github.com/joaquimrocha/Skeltrack
Nifty Tools for Development: GFreenect: https://github.com/elima/GFreenect GFreenect Utils: https://github.com/joaquimrocha/gfreenect-utils
GFreenect Python Example
Tool: record-depth-file
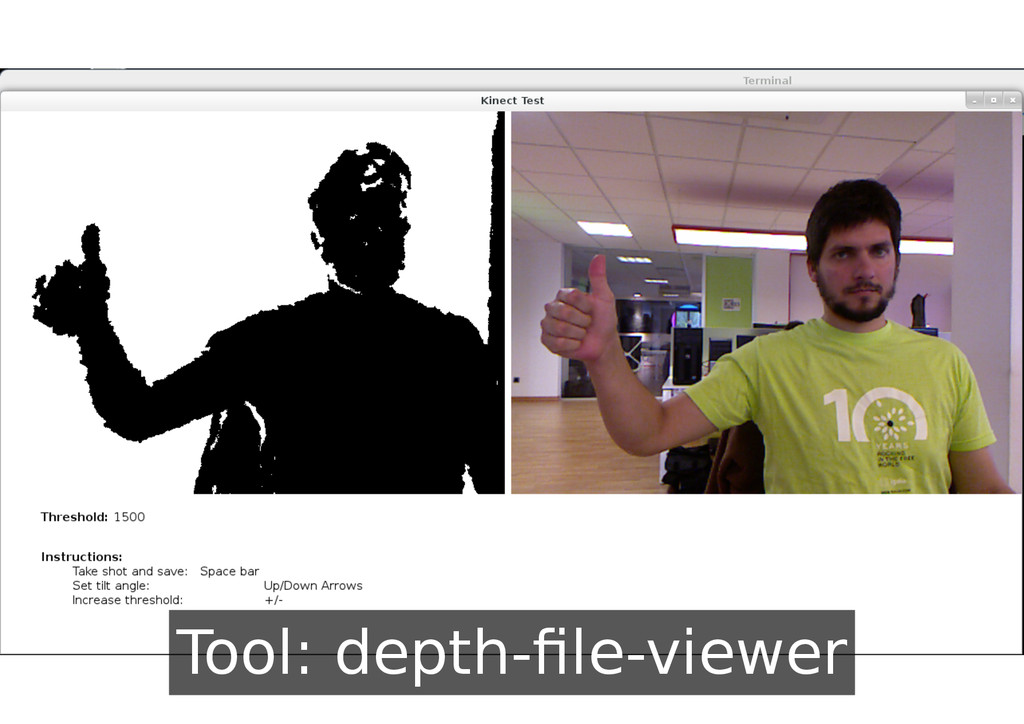
Tool: depth-file-viewer
Questions?
Creative Commons pictures from flickr: Kinect: Auxo.co.kr Ampelmann: echiner1 Kid
Playing: Rob Welsh Skeleton: Dark Botxy
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}