Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
日本産業技術教育学会(第66回全国大会)発表資料「画像認識AIを活用した枝豆選別機の授業実践 」
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
みんなのコード
December 21, 2023
Education
0
460
日本産業技術教育学会(第66回全国大会)発表資料「画像認識AIを活用した枝豆選別機の授業実践 」
みんなのコード
December 21, 2023
Tweet
Share
More Decks by みんなのコード
See All by みんなのコード
中央教育審議会 教育課程企画特別部会 情報・技術ワーキンググループに向けた提言 ー次期学習指導要領での情報活用能力の抜本的向上に向けてー
codeforeveryone
0
520
みんなのコードD&I推進レポート2025 テクノロジー分野のジェンダーギャップとその取り組みについて
codeforeveryone
0
660
The Gender Gap in the Technology Field and Efforts to Address It.
codeforeveryone
0
30
小学校女性教員向け プログラミング教育研修プログラム「SteP」の実践と課題
codeforeveryone
0
180
みんなのコード 2024年度活動報告書/ 2025年度活動計画書
codeforeveryone
0
840
NPOでのDevinの活用
codeforeveryone
0
1.3k
情報教育に関する 学校現場の実践事例
codeforeveryone
0
950
Make Information Education Inclusive
codeforeveryone
0
120
【みんなのコード】文科省生成AIガイドラインVer.2.0 入門編
codeforeveryone
0
690
Other Decks in Education
See All in Education
AWS re_Invent に全力で参加したくて筋トレを頑張っている話
amarelo_n24
2
130
Flinga
matleenalaakso
3
15k
The Next Big Step Toward Nuclear Disarmament
hide2kano
0
230
2025-12-11 nakanoshima.dev LT
takesection
0
110
LotusScript でエージェント情報を出力してみた
harunakano
0
130
AIでキミの未来はどう変わる?
behomazn
0
110
【洋書和訳:さよならを待つふたりのために】第1章 出会いとメタファー
yaginumatti
0
250
TeXで変える教育現場
doratex
1
13k
Web Search and SEO - Lecture 10 - Web Technologies (1019888BNR)
signer
PRO
2
3.1k
HyRead2526
cbtlibrary
0
200
Microsoft Office 365
matleenalaakso
0
2.1k
栃木県警サイバーセキュリティ研修会2026
nomizone
0
210
Featured
See All Featured
How to Talk to Developers About Accessibility
jct
2
140
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
9.9k
Stop Working from a Prison Cell
hatefulcrawdad
273
21k
Performance Is Good for Brains [We Love Speed 2024]
tammyeverts
12
1.4k
The Director’s Chair: Orchestrating AI for Truly Effective Learning
tmiket
1
100
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
77
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.1k
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
260
Dealing with People You Can't Stand - Big Design 2015
cassininazir
367
27k
Leveraging Curiosity to Care for An Aging Population
cassininazir
1
170
Refactoring Trust on Your Teams (GOTO; Chicago 2020)
rmw
35
3.4k
The MySQL Ecosystem @ GitHub 2015
samlambert
251
13k
Transcript
1 ©2023 特定非営利活動法人みんなのコード 画像認識AIを活用した枝豆選別機の授業実践 ◦千石 一朗1,古内 利明2,板垣 翔大3,安藤 明伸4
1NPO法人みんなのコード 2宮教大附属中 3宮教大 4広島工大
2 ©2023 特定非営利活動法人みんなのコード 発表の流れ 1. はじめに(授業実践の背景) 2. 枝豆選別機の概要 ◦
ハードウェア ◦ ソフトウェア 3. 授業実践 4. 結論と今後の課題
3 ©2023 特定非営利活動法人みんなのコード はじめに
4 ©2023 特定非営利活動法人みんなのコード D(3)計測と制御のプログラミングによる問題の解決 H29年 学習指導要領 H20年 学習指導要領 (3)
計測・制御のプログラミングによる問題の解 決 (ア) 計測・制御システムの仕組み,安全・適切 な制作,動作の確認,デバッグ等 (イ) 問題の発見と課題の設定,計測・制御シ ステムの構想と情報処理の手順の具体 化,制作の過程や結果の評価,改善及 び修正 (3)プログラムによる計測・制御 (ア)コンピュータを利用した計測・制御の基 本的な仕組み (イ) 情報処理の手順と,簡単なプログラム の作成
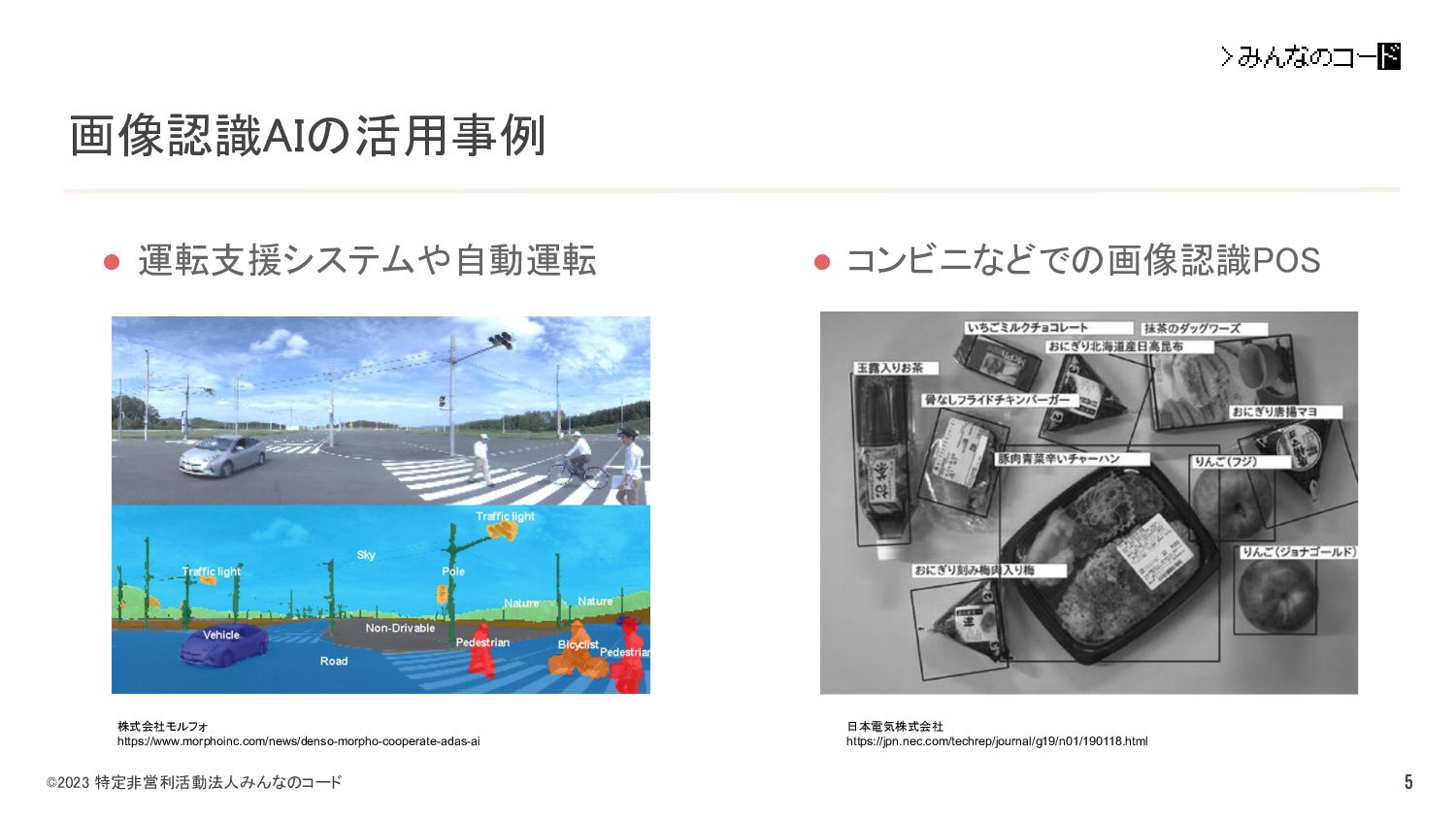
5 ©2023 特定非営利活動法人みんなのコード 画像認識AIの活用事例 • 運転支援システムや自動運転 日本電気株式会社 https://jpn.nec.com/techrep/journal/g19/n01/190118.html 株式会社モルフォ
https://www.morphoinc.com/news/denso-morpho-cooperate-adas-ai • コンビニなどでの画像認識POS
6 ©2023 特定非営利活動法人みんなのコード D(4)社会の発展と情報の技術 (ア)生活や社会,環境との関わりを踏まえて,技術の概念を理解すること。 (イ)技術を評価し,適切な選択と管理・運用の在り方や,新たな発想に基づく改良と応用に ついて考えること。 【解説】人工知能の活用について,人間の労働環 境や安全性,経済性の視点から,その利用方法
を検討するなど〜(省略)〜提言をまとめさせたり する活動が考えられる
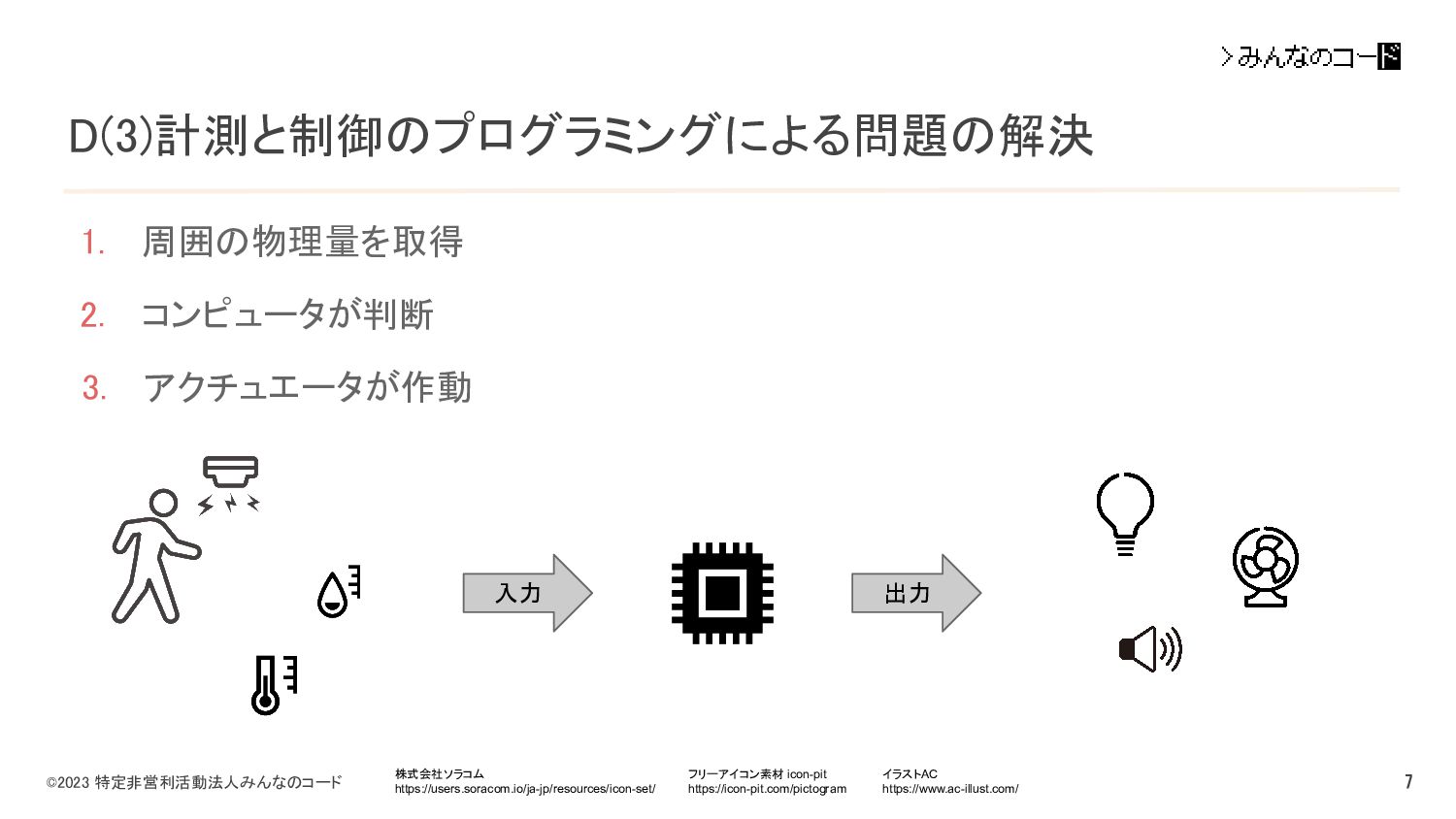
7 ©2023 特定非営利活動法人みんなのコード D(3)計測と制御のプログラミングによる問題の解決 1. 周囲の物理量を取得 イラストAC https://www.ac-illust.com/ 入力
出力 株式会社ソラコム https://users.soracom.io/ja-jp/resources/icon-set/ 2. コンピュータが判断 3. アクチュエータが作動 フリーアイコン素材 icon-pit https://icon-pit.com/pictogram
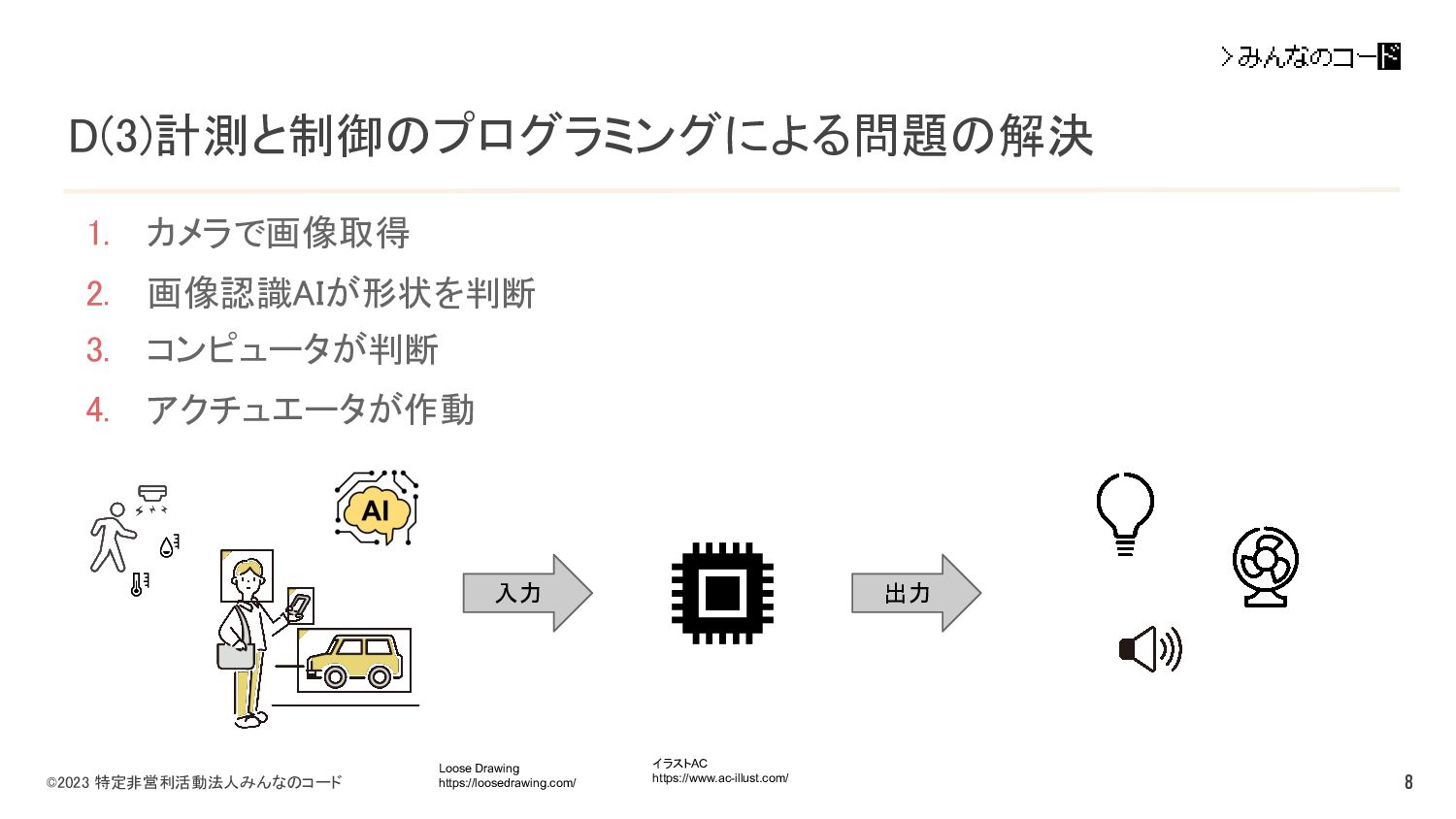
8 ©2023 特定非営利活動法人みんなのコード D(3)計測と制御のプログラミングによる問題の解決 Loose Drawing https://loosedrawing.com/ 入力 出力
1. カメラで画像取得 2. 画像認識AIが形状を判断 3. コンピュータが判断 4. アクチュエータが作動 イラストAC https://www.ac-illust.com/
9 ©2023 特定非営利活動法人みんなのコード 枝豆選別機の概要
10 ©2023 特定非営利活動法人みんなのコード ハードウェア
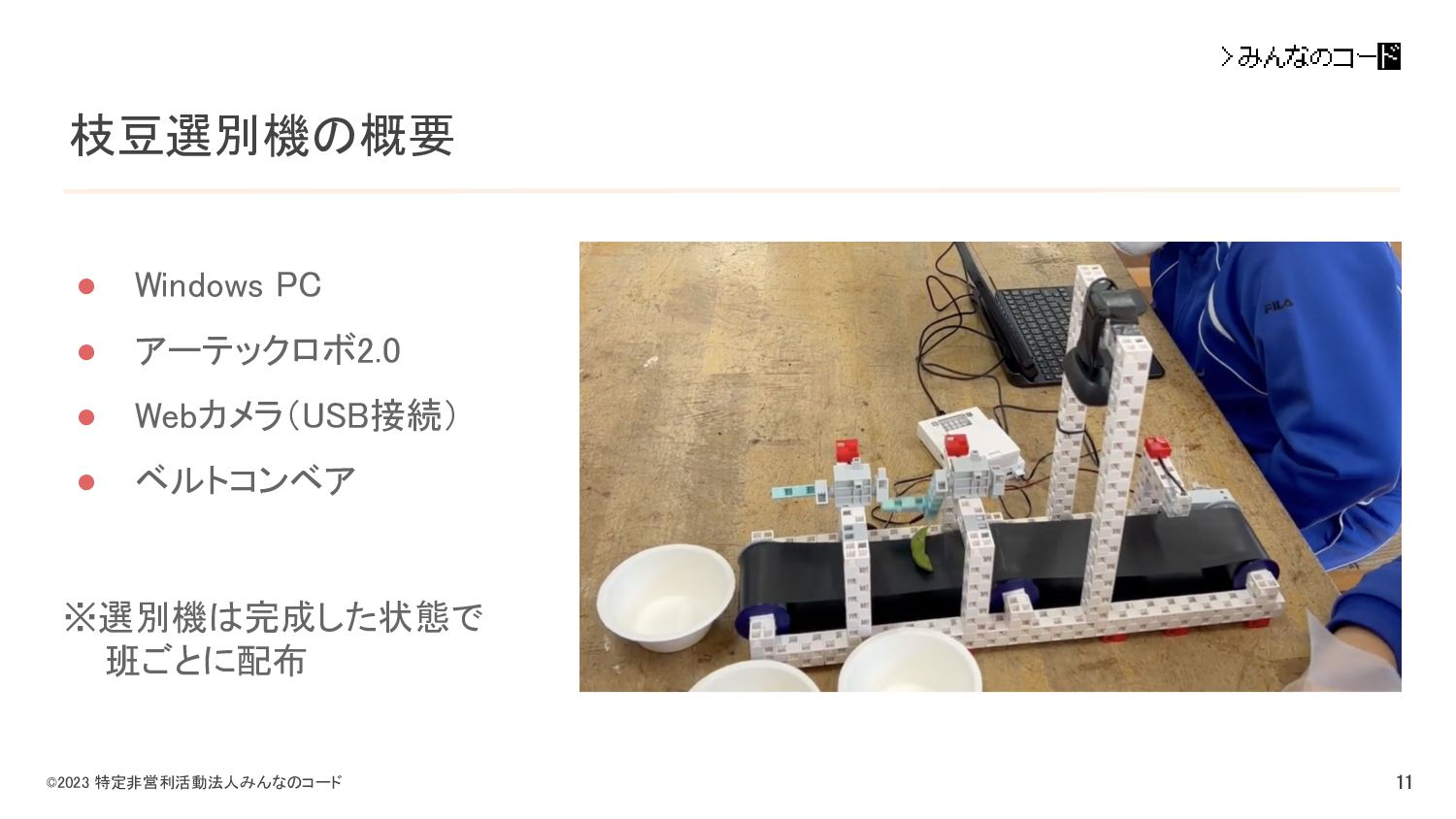
11 ©2023 特定非営利活動法人みんなのコード 枝豆選別機の概要 • Windows PC • アーテックロボ2.0
• Webカメラ(USB接続) • ベルトコンベア ※選別機は完成した状態で 班ごとに配布
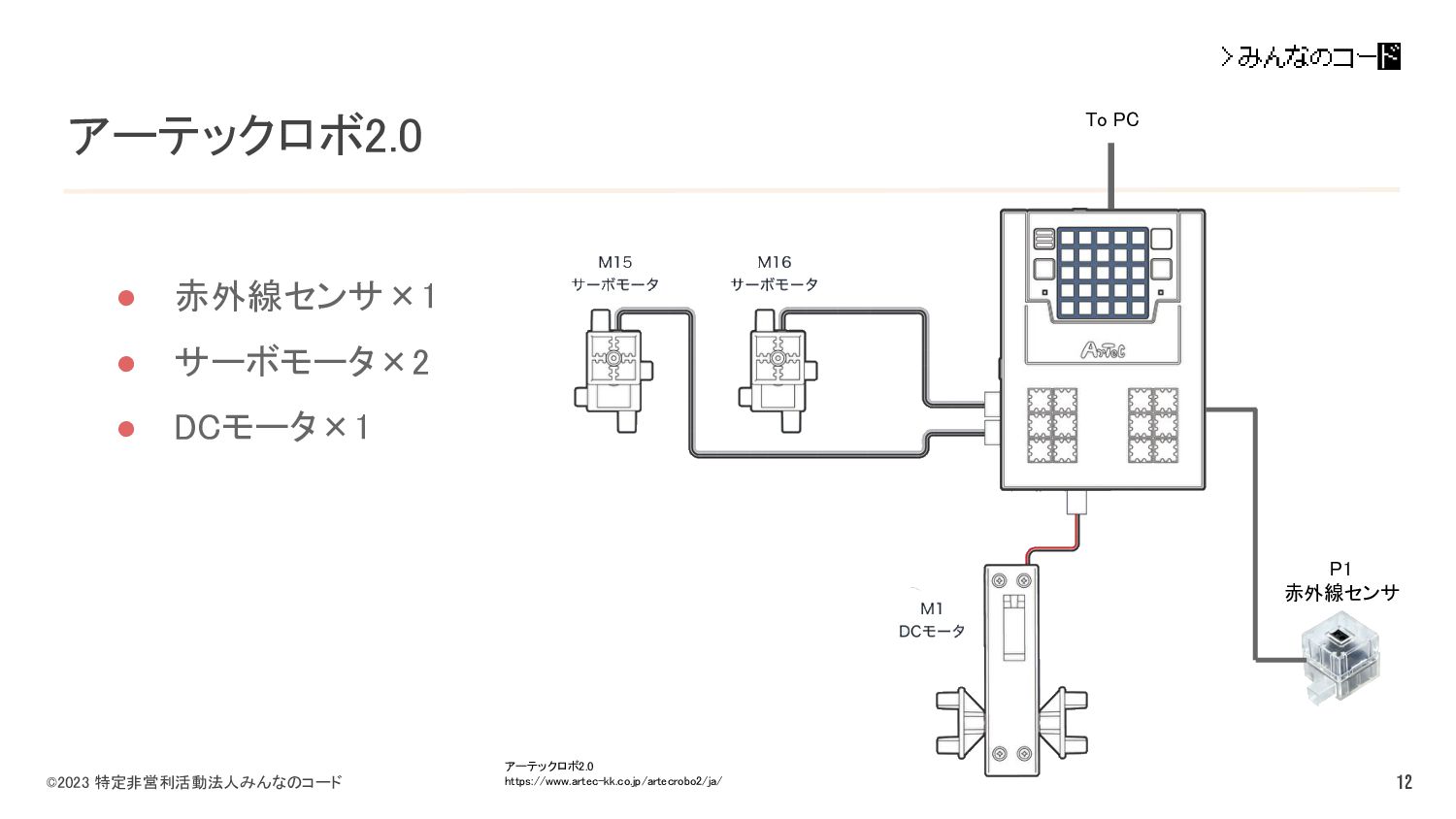
12 ©2023 特定非営利活動法人みんなのコード アーテックロボ2.0 • 赤外線センサ×1 • サーボモータ×2 •
DCモータ×1 P1 赤外線センサ To PC アーテックロボ2.0 https://www.artec-kk.co.jp/artecrobo2/ja/
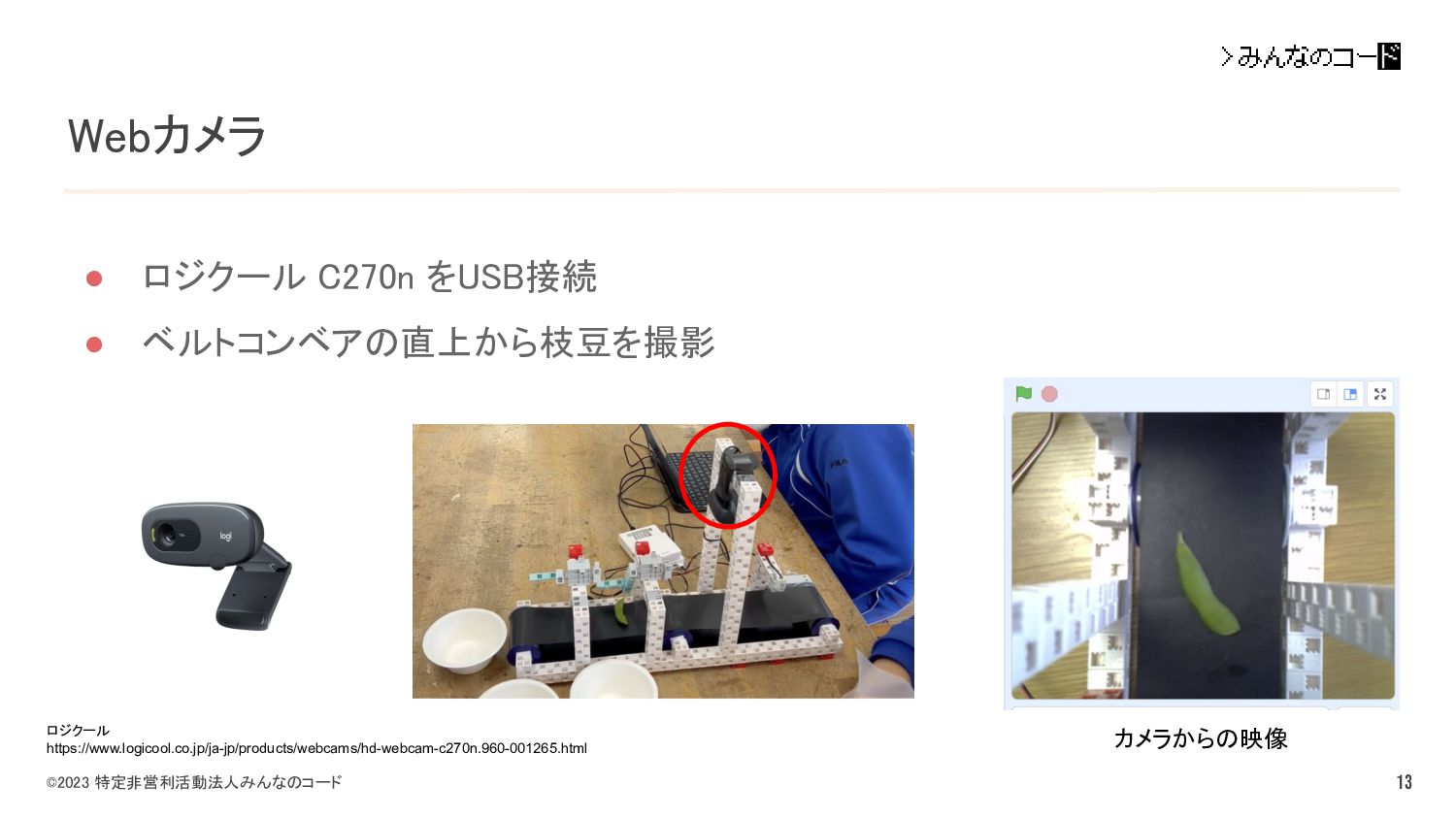
13 ©2023 特定非営利活動法人みんなのコード Webカメラ • ロジクール C270n をUSB接続 •
ベルトコンベアの直上から枝豆を撮影 ロジクール https://www.logicool.co.jp/ja-jp/products/webcams/hd-webcam-c270n.960-001265.html カメラからの映像
14 ©2023 特定非営利活動法人みんなのコード 基本的な動作原理 1. 赤外線センサで通過を検知 2. Webカメラで形状を判断 3.
2粒の枝豆を弾く 4. 3粒の枝豆を弾く ※2〜3粒の枝豆以外はベルトコンベアの 端 から落ちる
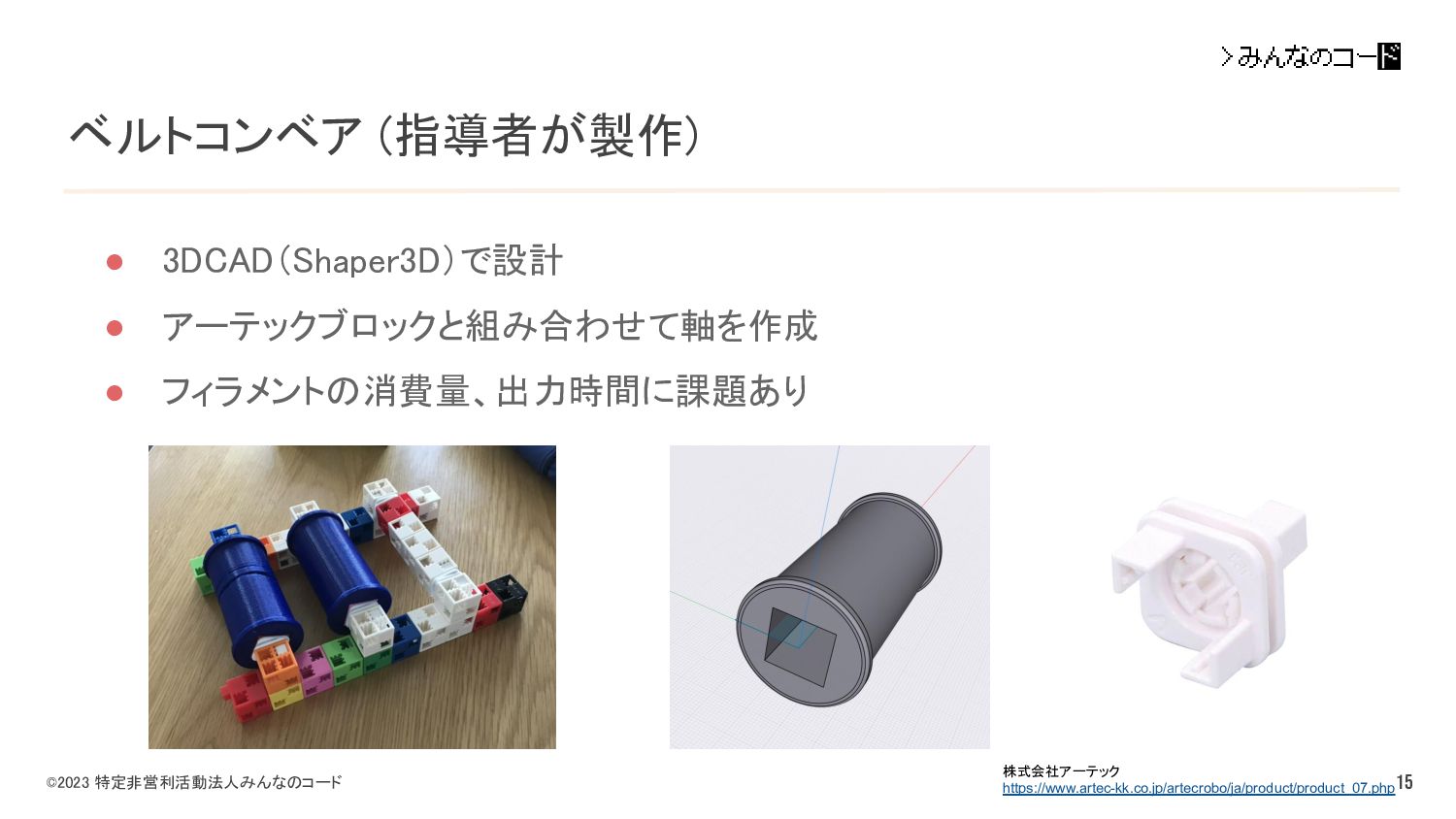
15 ©2023 特定非営利活動法人みんなのコード ベルトコンベア (指導者が製作) • 3DCAD(Shaper3D)で設計 • アーテックブロックと組み合わせて軸を作成
• フィラメントの消費量、出力時間に課題あり 株式会社アーテック https://www.artec-kk.co.jp/artecrobo/ja/product/product_07.php
16 ©2023 特定非営利活動法人みんなのコード ベルトコンベア (指導者が製作) • 3Dプリントの部品を縮小 • 水道パイプの部品を流用
• ゴムシート(0.5mm厚)
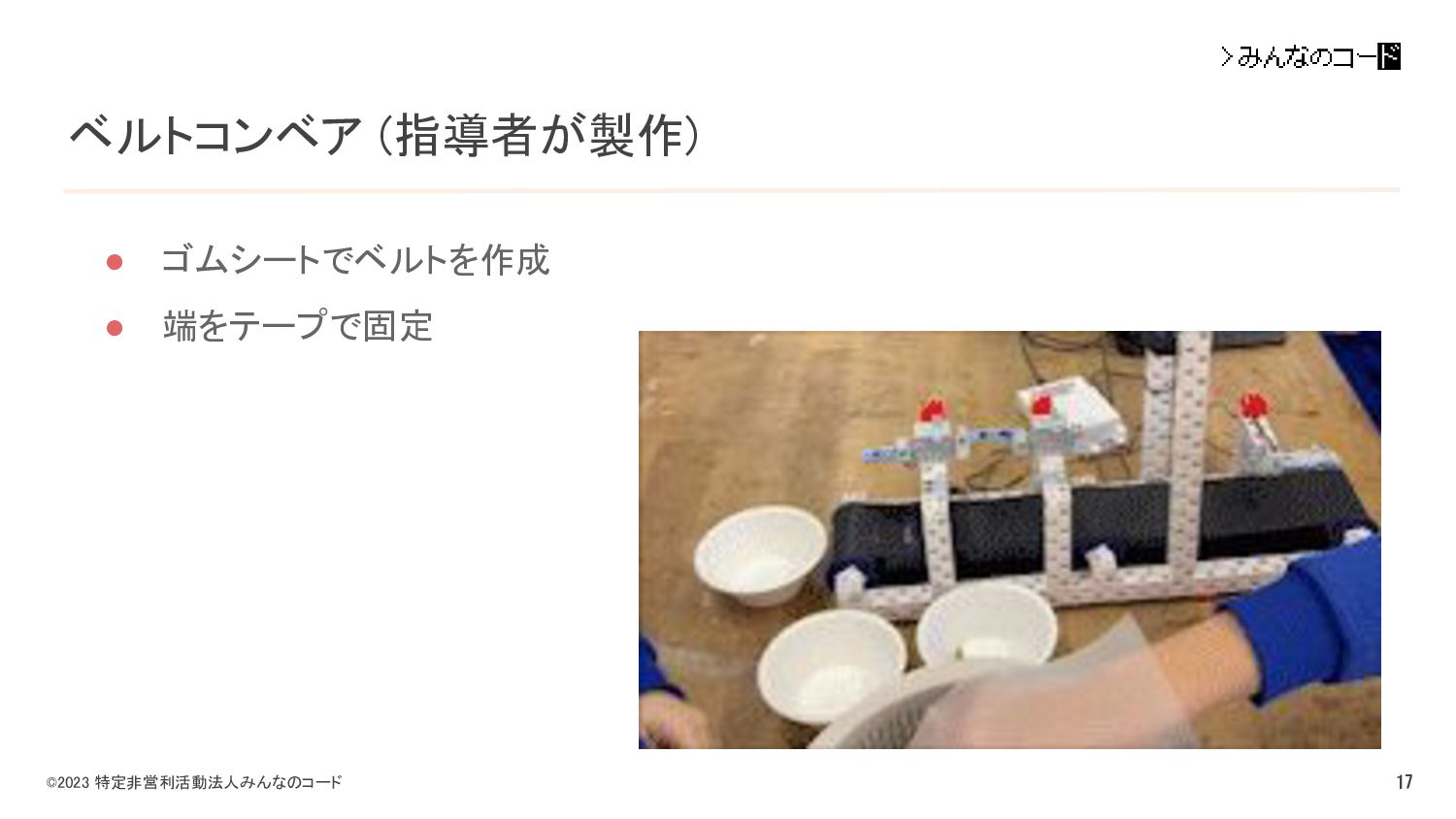
17 ©2023 特定非営利活動法人みんなのコード ベルトコンベア (指導者が製作) • ゴムシートでベルトを作成 • 端をテープで固定
18 ©2023 特定非営利活動法人みんなのコード アーム • アーテックロボのサーボモータ • アーテックブロックで腕を作成 •
サーボモータの角度を制御 • 対象物をアームで弾き飛ばすしくみ
19 ©2023 特定非営利活動法人みんなのコード ソフトウェア
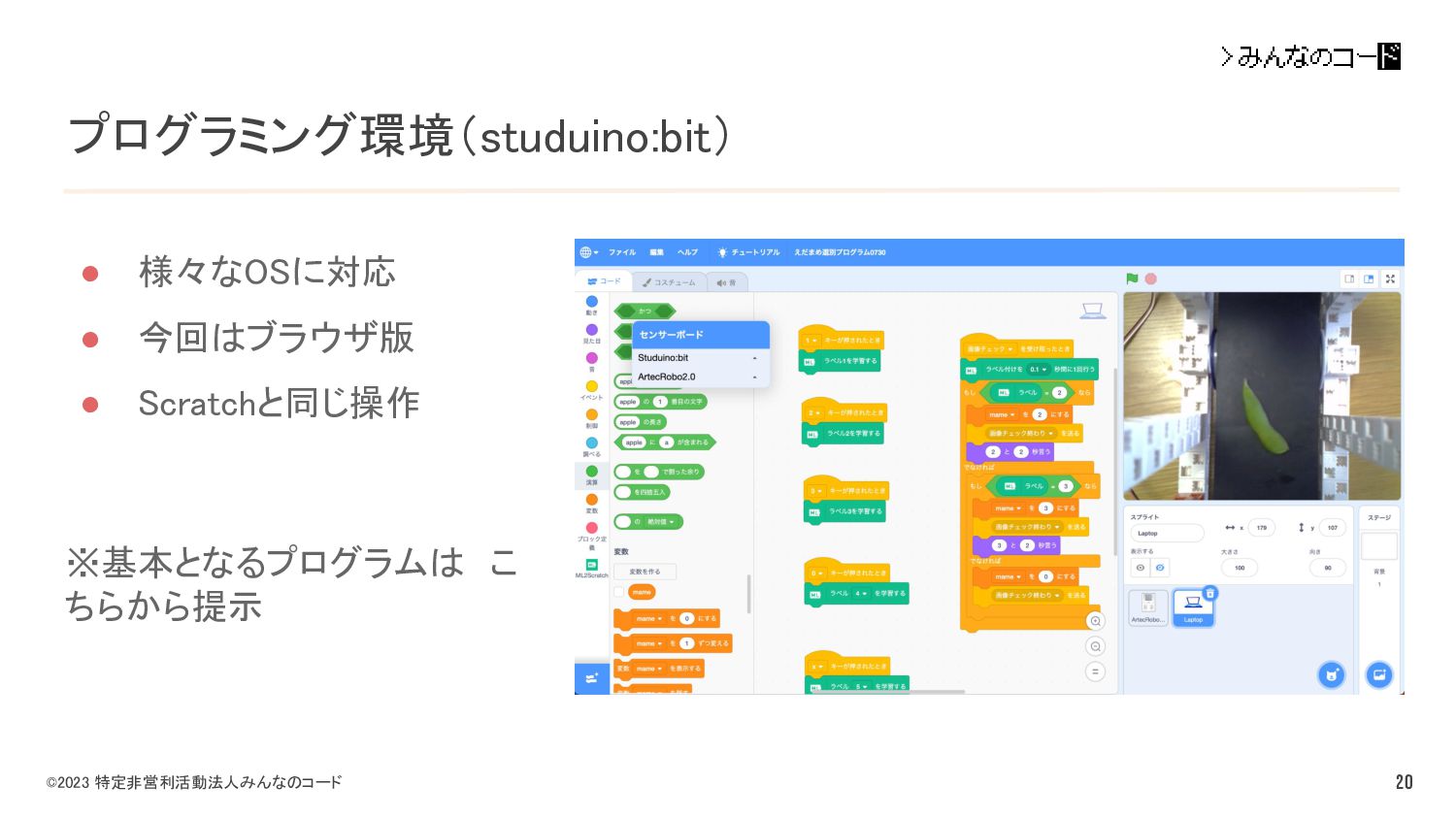
20 ©2023 特定非営利活動法人みんなのコード プログラミング環境(studuino:bit) • 様々なOSに対応 • 今回はブラウザ版 •
Scratchと同じ操作 ※基本となるプログラムは こ ちらから提示
21 ©2023 特定非営利活動法人みんなのコード 画像認識AI(ML2Scratch) • TensorFlow.jsを使った機械学習をScratchから簡単に 利用できる • Scratchの拡張機能として用意されている
• Webカメラからの画像を識別させる • 学習履歴をJSON形式のファイルで保存できる
22 ©2023 特定非営利活動法人みんなのコード 授業実践
23 ©2023 特定非営利活動法人みんなのコード 単元の目標 (1) アクティビティ図を用いてシステムを構成する技能を身に付ける。また、画像認識プ ログラムを作成・実行することで、プログラムをデバッグする技能を身に付ける。 (2) 画像認識させるための計測・制御システムを考え、解決策を構想し、制作図に表現
し、試作を通じて具現化することで、課題を解決する力を養う。 (3) 栽培装置を制作する体験やAIを用いた自動選別機を導入した農家の話を聞くこと で、AIの意義や可能性を考える。
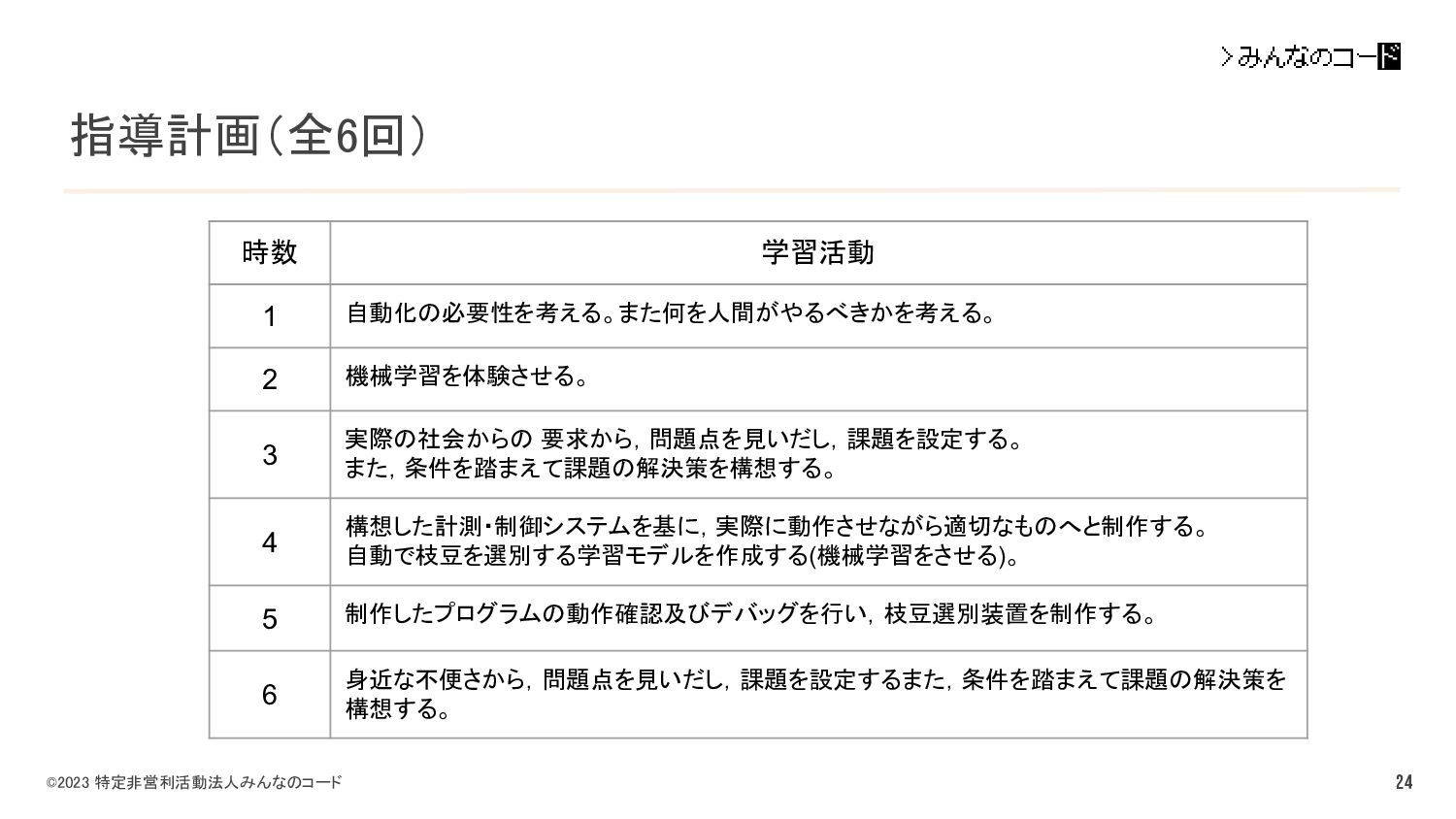
24 ©2023 特定非営利活動法人みんなのコード 指導計画(全6回) 時数 学習活動 1 自動化の必要性を考える。また何を人間がやるべきかを考える。 2
機械学習を体験させる。 3 実際の社会からの 要求から,問題点を見いだし,課題を設定する。 また,条件を踏まえて課題の解決策を構想する。 4 構想した計測・制御システムを基に,実際に動作させながら適切なものへと制作する。 自動で枝豆を選別する学習モデルを作成する(機械学習をさせる)。 5 制作したプログラムの動作確認及びデバッグを行い,枝豆選別装置を制作する。 6 身近な不便さから,問題点を見いだし,課題を設定するまた,条件を踏まえて課題の解決策を 構想する。
25 ©2023 特定非営利活動法人みんなのコード 農家の方のインタビュー • 自動化の必要性を考える https://youtu.be/FSZLF8YQc_E?si=iP5Wa_GtMaJngy0y
26 ©2023 特定非営利活動法人みんなのコード 機械学習の体験 • Teachable Machine https://teachablemachine.withgoogle.com/
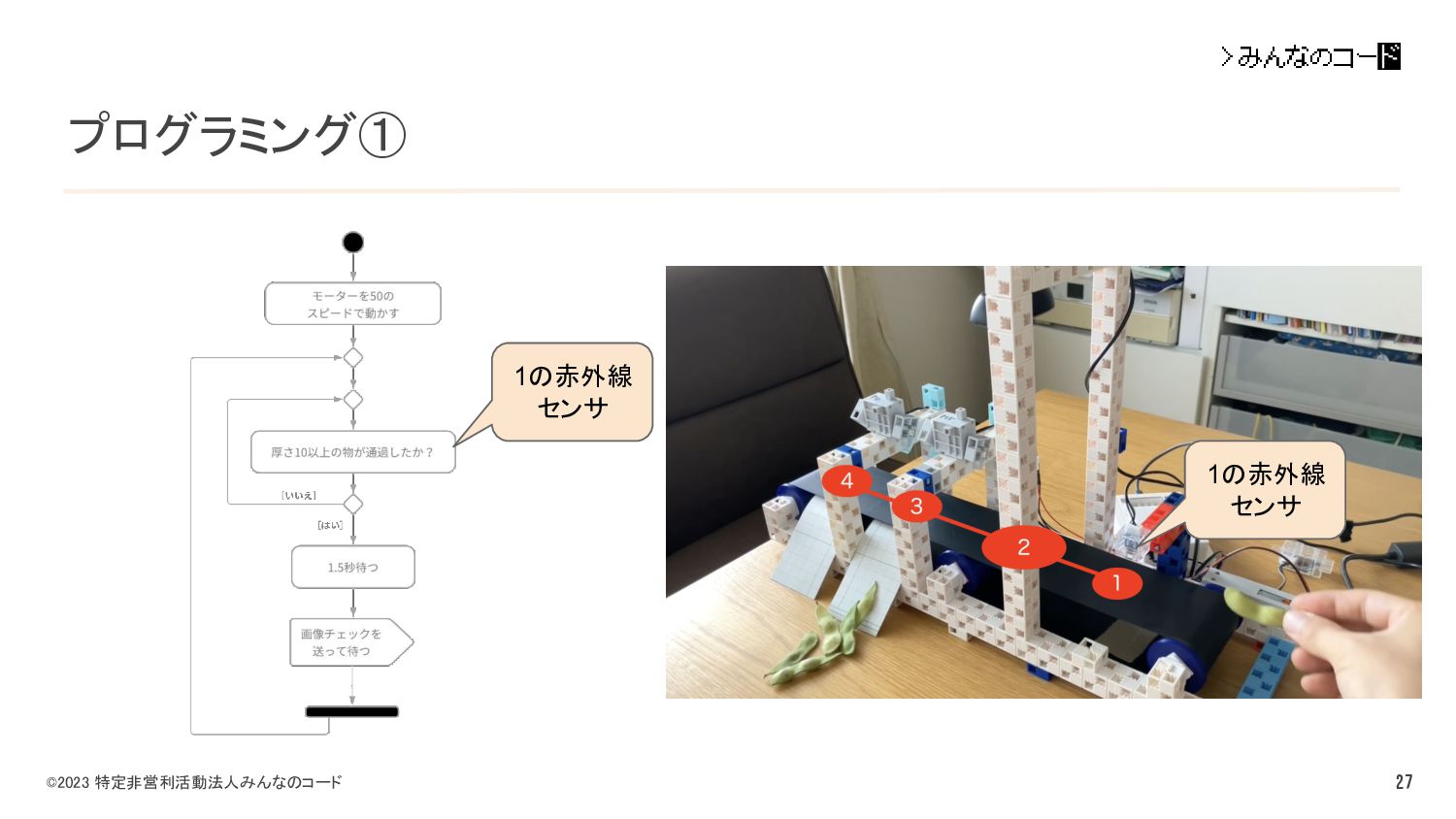
27 ©2023 特定非営利活動法人みんなのコード プログラミング① 1の赤外線 センサ 1の赤外線 センサ
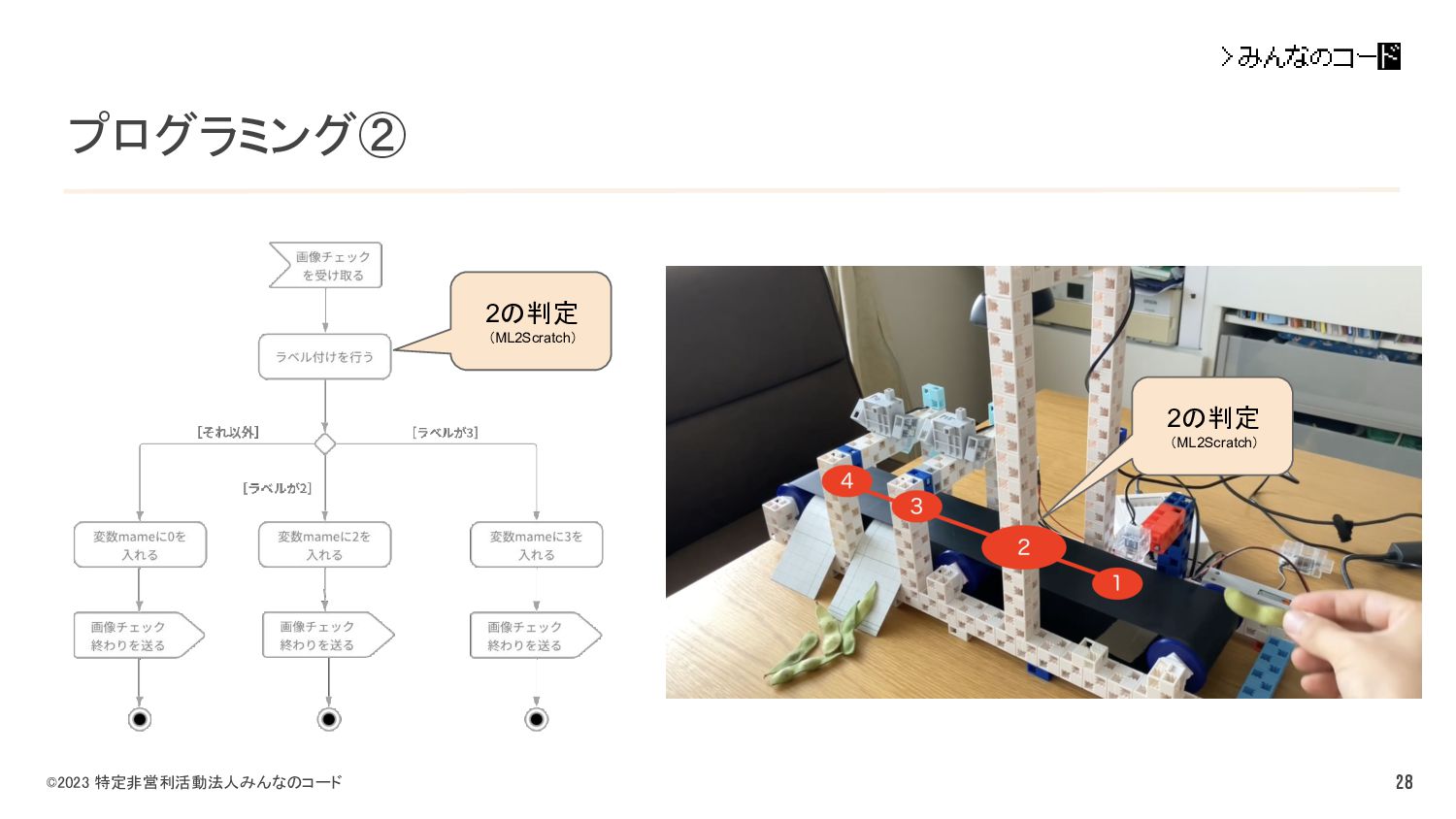
28 ©2023 特定非営利活動法人みんなのコード プログラミング② 2の判定 (ML2Scratch) 2の判定 (ML2Scratch)
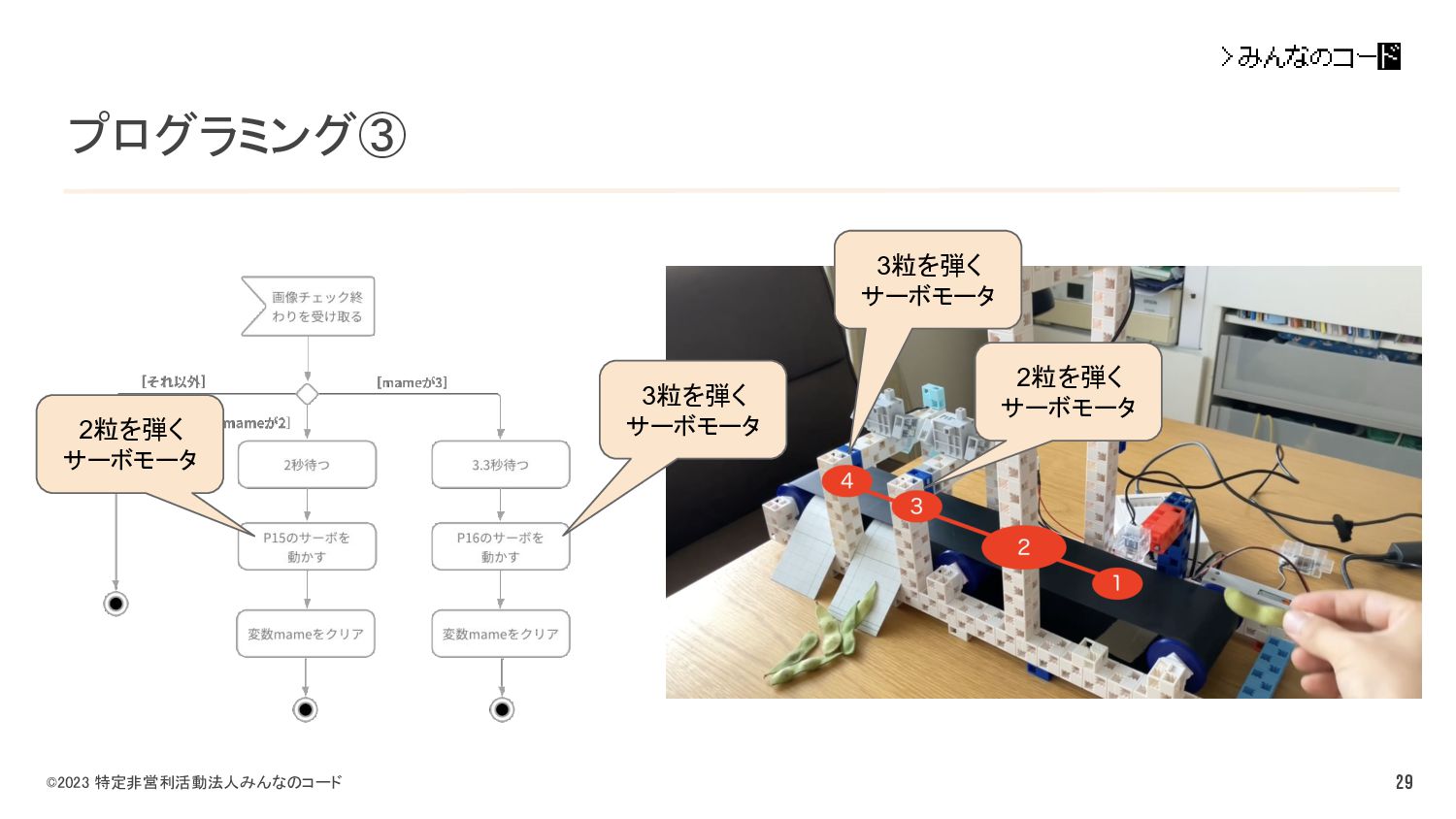
29 ©2023 特定非営利活動法人みんなのコード プログラミング③ 2粒を弾く サーボモータ 2粒を弾く サーボモータ 3粒を弾く
サーボモータ 3粒を弾く サーボモータ
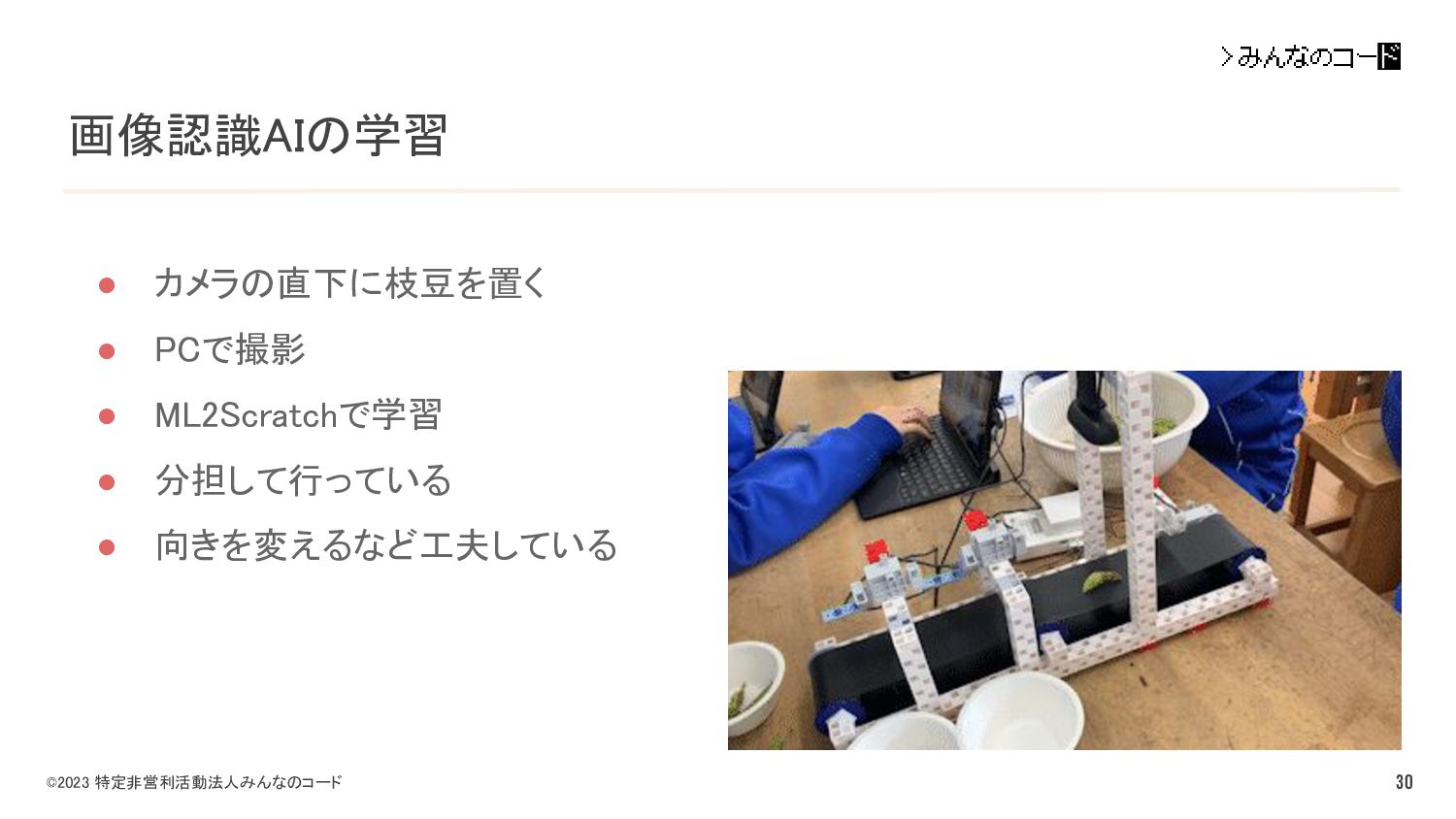
30 ©2023 特定非営利活動法人みんなのコード 画像認識AIの学習 • カメラの直下に枝豆を置く • PCで撮影 •
ML2Scratchで学習 • 分担して行っている • 向きを変えるなど工夫している
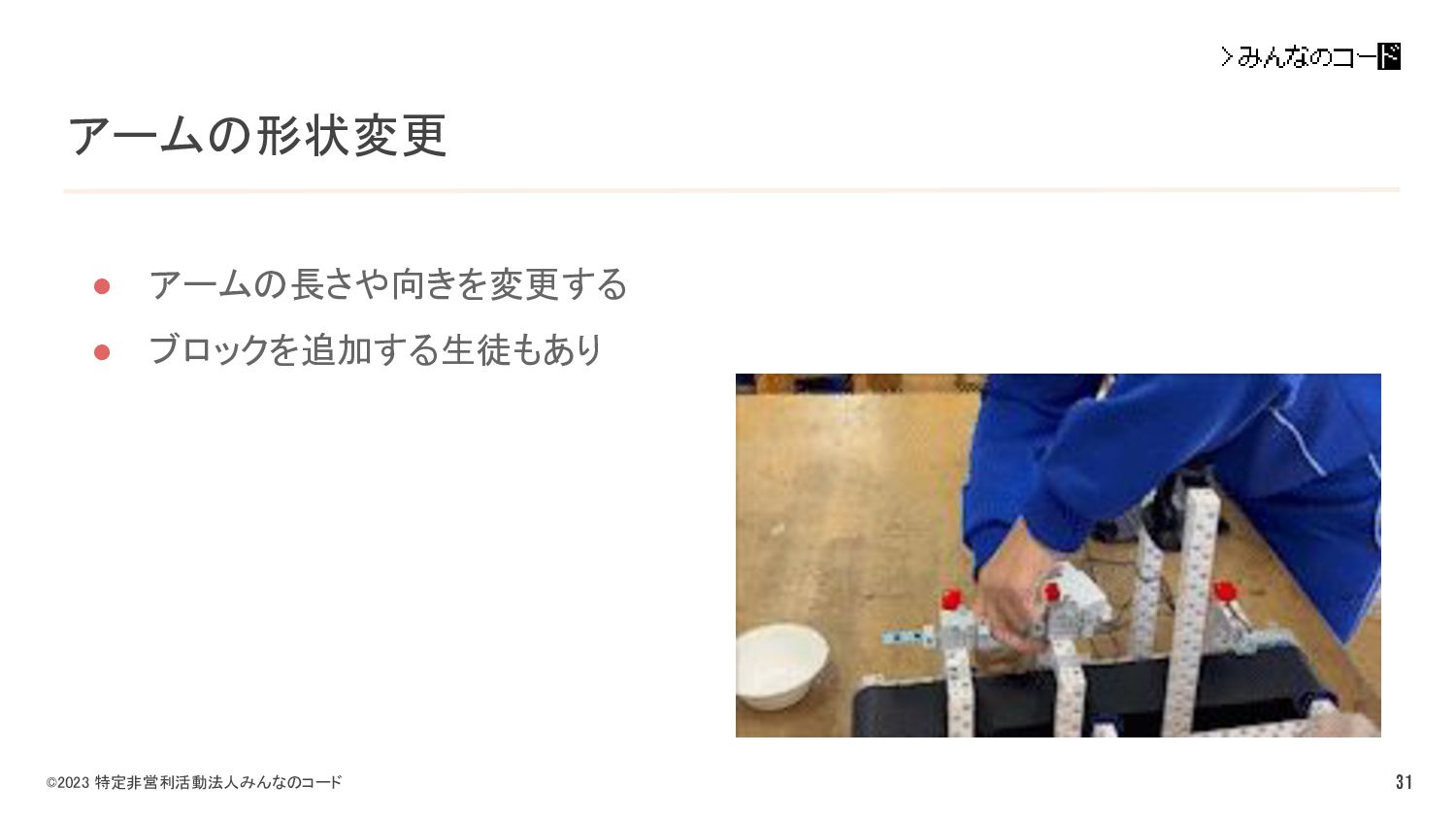
31 ©2023 特定非営利活動法人みんなのコード アームの形状変更 • アームの長さや向きを変更する • ブロックを追加する生徒もあり
32 ©2023 特定非営利活動法人みんなのコード 結論と今後の課題
33 ©2023 特定非営利活動法人みんなのコード 結論について • 画像認識AIを用いた分別作業を自動化するシステムを作れた ◦ 分別したいものを学習させれば他に流用可能 •
社会でのAIの活用を模擬的に体験して学ぶことができた • 正確さ、効率については検証できなかった ◦ 正しく・効率よく識別させるために必要なもの、条件等の比較
34 ©2023 特定非営利活動法人みんなのコード 今後の課題 • 宮教大附属小ではTeachable Machineを用いた画像認識AIの学習を行ってい る。今後は... ◦小学校で画像認識AIの基礎的な理解
◦中学校で画像認識AIを用いた課題の解決 といった学習を行うと、より深い理解が図れるのではないか。
35 ©2023 特定非営利活動法人みんなのコード 今後の課題 • センサを用いた計測について ◦ 衝突を回避するための自動ブレーキのシステム ◦
赤外線センサなどで障害物との距離を計測 イラストAC https://www.ac-illust.com/
36 ©2023 特定非営利活動法人みんなのコード 今後の課題 • 画像認識AIを用いた計測・制御について ◦ 画像を認識してハンドルやブレーキを制御している
東芝 https://www.toshiba-clip.com/detail/p=152 日産自動車 https://www.nissan-global.com/JP/INNOVATION/TECHNOLOGY/ARCHIVE/PPNL/ 標識を認識して減速
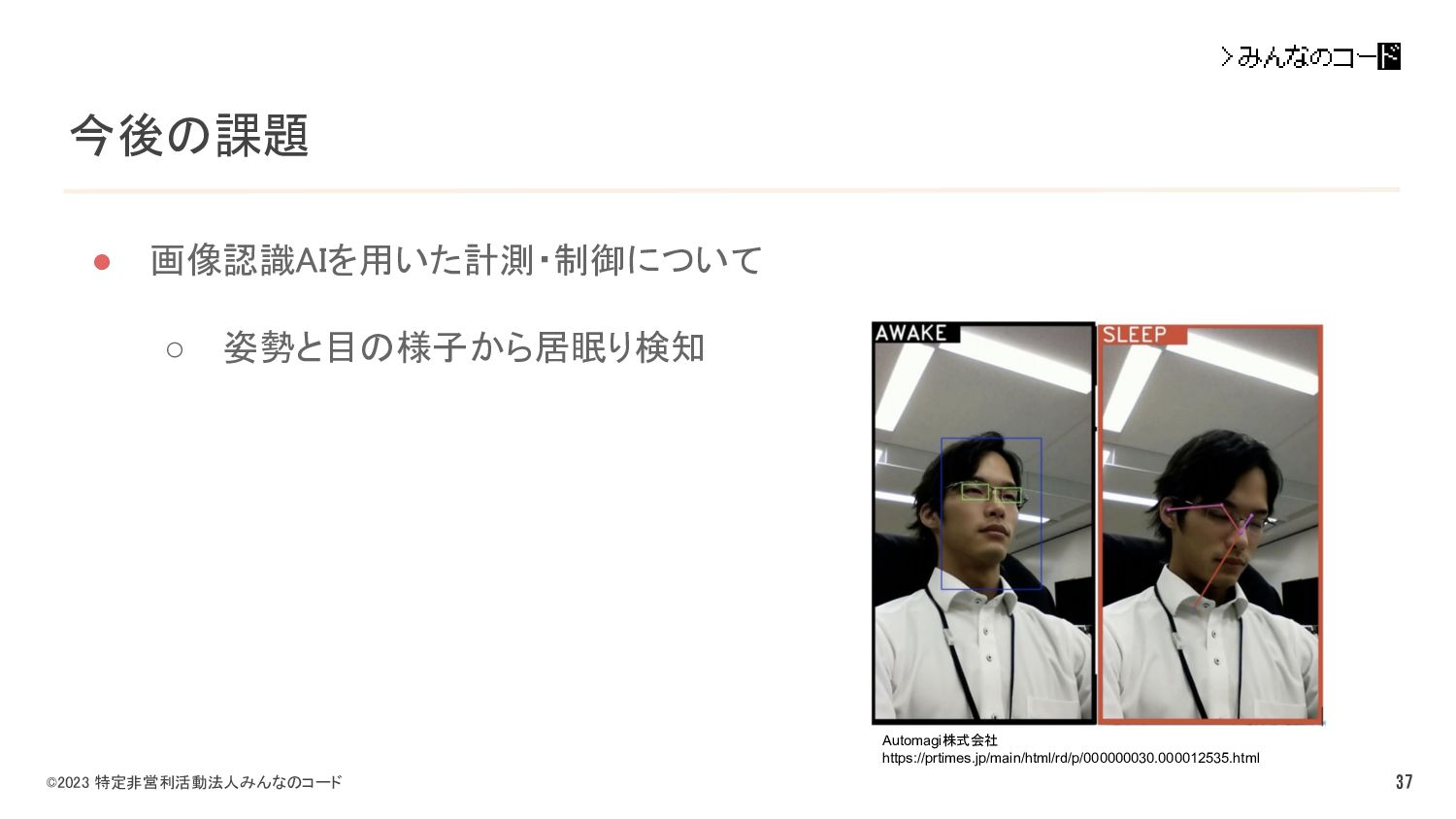
37 ©2023 特定非営利活動法人みんなのコード 今後の課題 • 画像認識AIを用いた計測・制御について ◦ 姿勢と目の様子から居眠り検知
Automagi株式会社 https://prtimes.jp/main/html/rd/p/000000030.000012535.html
38 ©2023 特定非営利活動法人みんなのコード FIN
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}