使用計算機 繰り返しの多い屋内環境 MS Azure Kinect (点群のみ使用) 比較対象 (LiDAR-IMU自己位置推定) FAST_LIO_LOCALIZATION (タイトカップリング) hdl_localization (ルーズカップリング) https://github.com/HViktorTsoi/FAST_LIO_LOCALIZATION https://github.com/koide3/hdl_localization 比較対象手法のみIMU & 初期姿勢有り ※点群の前処理以外はほぼ全てGPU実装 基本性能を見るためのデータ (Easy01, Easy02) と誘拐への対処を見るデータ (Kidnap01, Kidnap02) を記録
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
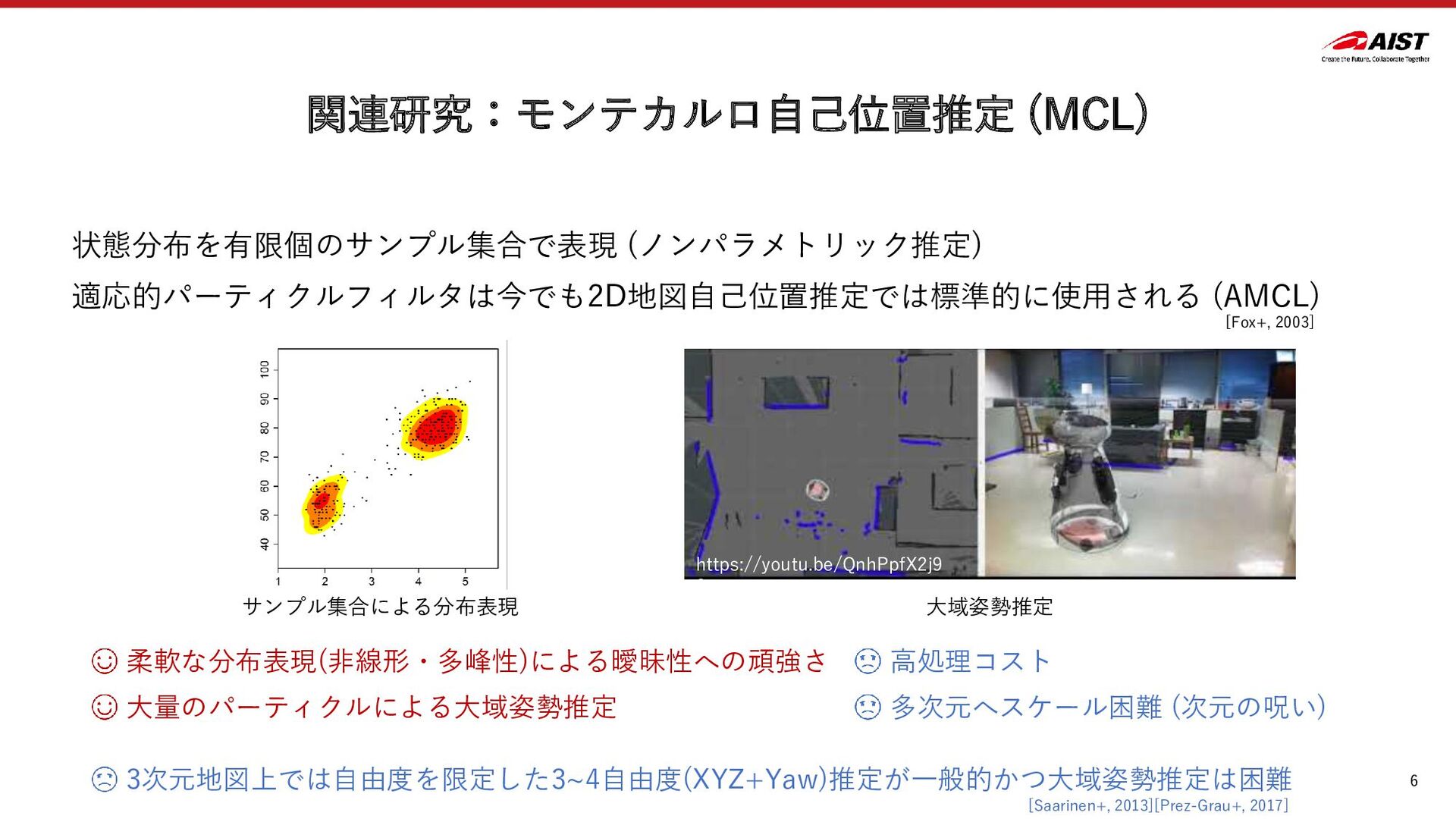
![7 関連研究:6自由度モンテカルロ姿勢推定 (6DoF-MCL) 6自由度空間にモンテカルロ姿勢推定を適用する試みが出てきている 基本的な方針は賢いサンプリングによって,少数のパーティクルで効率よく状態表現を行う • 車速情報の利用 [Akai+, 2020] •](https://files.speakerdeck.com/presentations/2bd36ea0843b4f3787bcc1922ced048e/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![15 修正ステップ:パーティクル更新則 リサンプリング (通常パーティクルフィルタ) [Kitagawa, 1993][Gordon, 1993] SVGD (64 particles)](https://files.speakerdeck.com/presentations/2bd36ea0843b4f3787bcc1922ced048e/slide_14.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}