Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Autonomous Agent Path Finding
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
hankeceli
January 19, 2021
24
0
Share
Autonomous Agent Path Finding
hankeceli
January 19, 2021
More Decks by hankeceli
See All by hankeceli
Introduction to Data Structures
hankeceli
0
99
Featured
See All Featured
Marketing Yourself as an Engineer | Alaka | Gurzu
gurzu
0
200
[RailsConf 2023] Rails as a piece of cake
palkan
59
6.6k
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.2k
Building a Scalable Design System with Sketch
lauravandoore
463
34k
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
110
DBのスキルで生き残る技術 - AI時代におけるテーブル設計の勘所
soudai
PRO
65
54k
VelocityConf: Rendering Performance Case Studies
addyosmani
333
25k
Dominate Local Search Results - an insider guide to GBP, reviews, and Local SEO
greggifford
PRO
0
170
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.7k
Code Reviewing Like a Champion
maltzj
528
40k
Build The Right Thing And Hit Your Dates
maggiecrowley
39
3.1k
Transcript
Autonomous Agent Path Finding
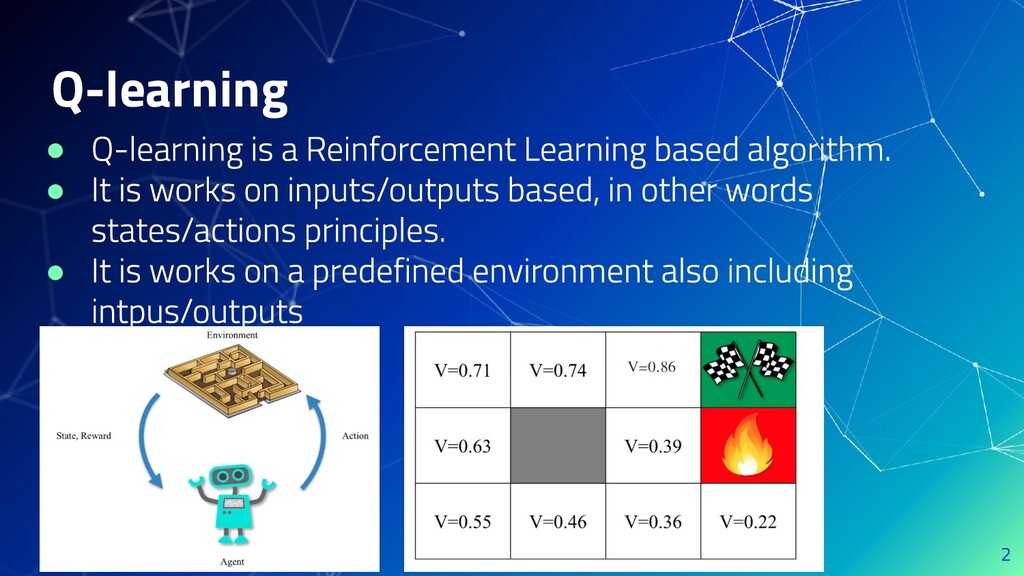
Q-learning • • •
Deep Q-learning
Building Steps ▰ ▰ ▰ ▰ ▰ ▰
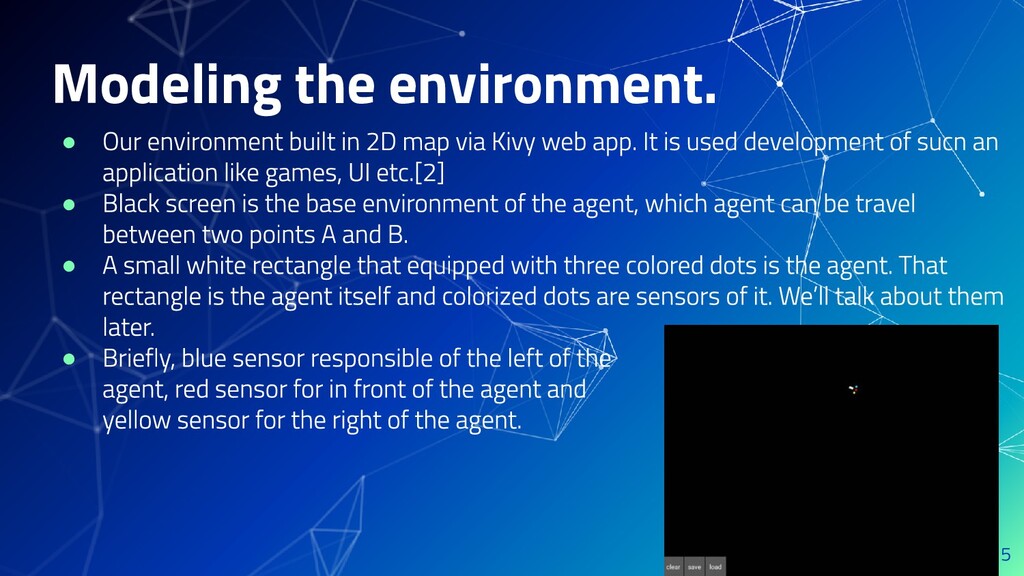
Modeling the environment. • • • •
Goal • • • •
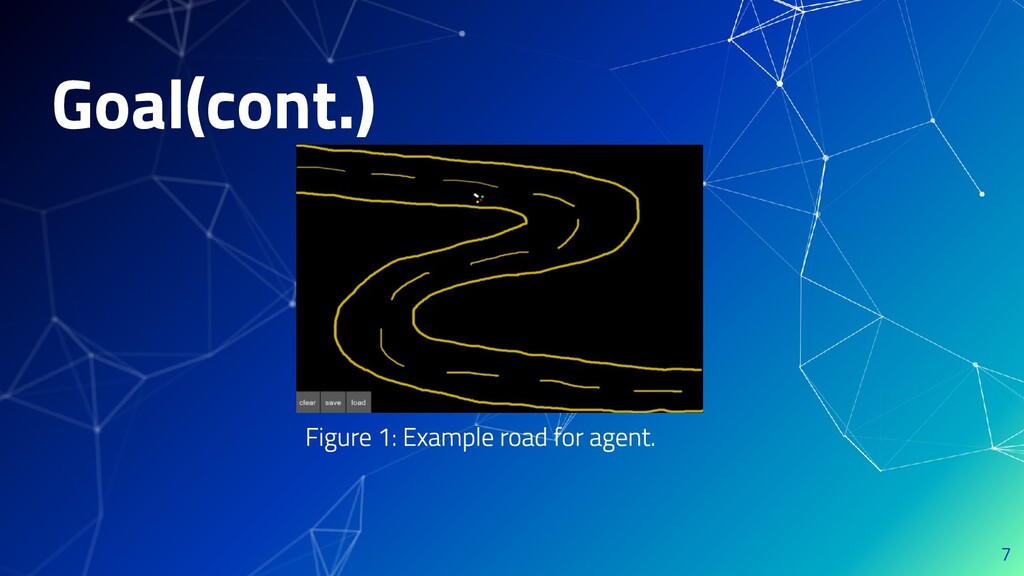
Goal(cont.)
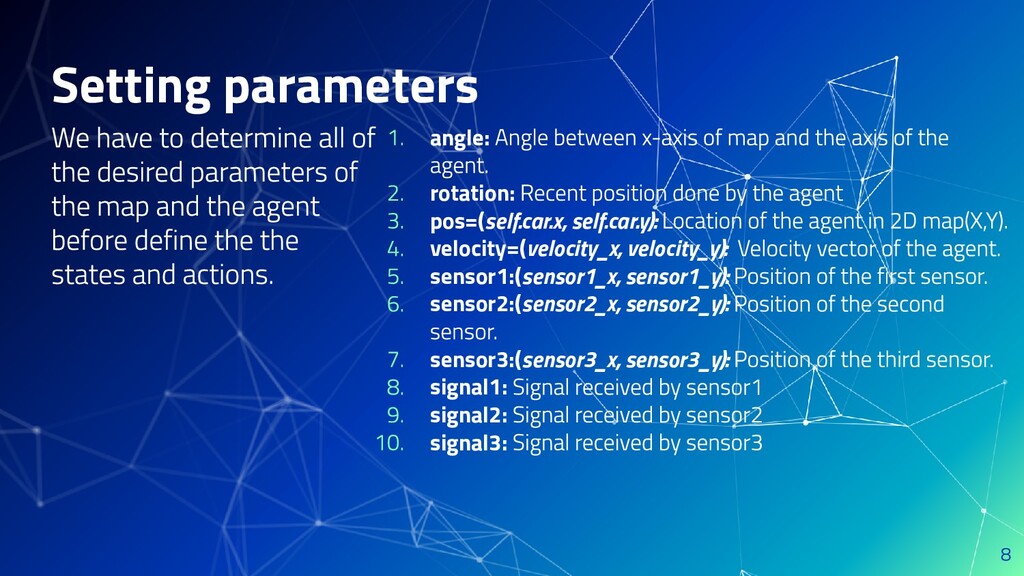
Setting parameters angle: rotation: pos=(self.car.x, self.car.y): velocity=(velocity_x, velocity_y): sensor1:(sensor1_x, sensor1_y):
sensor2:(sensor2_x, sensor2_y): sensor3:(sensor3_x, sensor3_y): signal1: signal2: signal3:
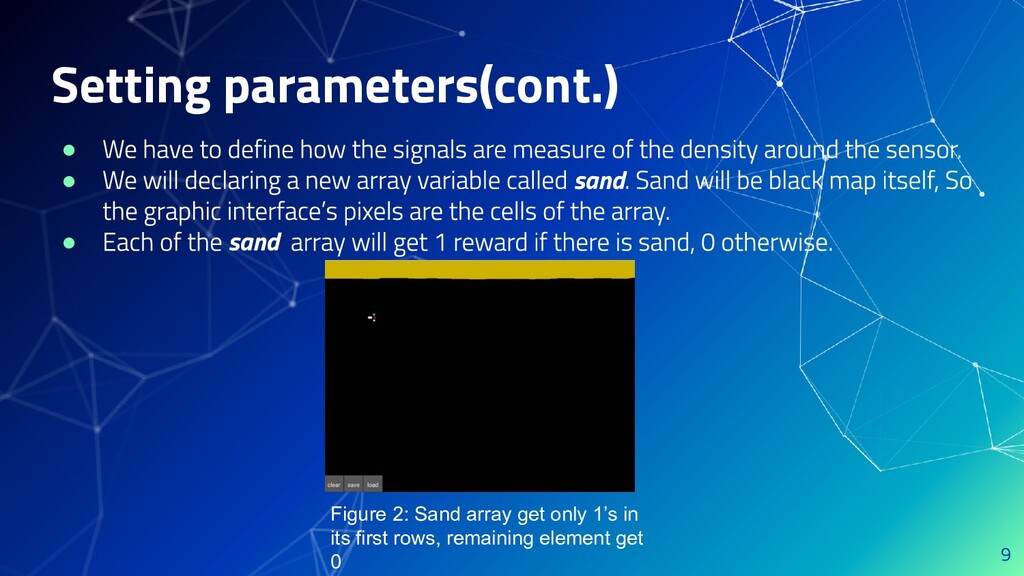
• • sand • sand Setting parameters(cont.) Figure 2: Sand
array get only 1’s in its first rows, remaining element get 0
Setting parameters(cont.) goal_x: goal_y: xx=(goal_x-self.car.x): yy=(goal_y-self.car.y): orientation:
• • orientation The input states
• • sensors • • The input states(cont.)
• • • • The output actions
• • The output actions(cont.)
• • • • The rewards
• • • The rewards(cont.)
REFERENCES ▰ ▰
THANKS! Any questions? ▰ ▰
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}