Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
卒業発表
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Dorayaki
December 15, 2023
0
53
卒業発表
Dorayaki
December 15, 2023
Tweet
Share
More Decks by Dorayaki
See All by Dorayaki
チーム開発「HANKEN」DEMODAY発表
dorayaki
0
100
小銭最適化
dorayaki
0
32
Featured
See All Featured
Optimizing for Happiness
mojombo
379
71k
Digital Projects Gone Horribly Wrong (And the UX Pros Who Still Save the Day) - Dean Schuster
uxyall
0
380
Scaling GitHub
holman
464
140k
Bash Introduction
62gerente
615
210k
ピンチをチャンスに:未来をつくるプロダクトロードマップ #pmconf2020
aki_iinuma
128
55k
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.6k
A designer walks into a library…
pauljervisheath
210
24k
Sam Torres - BigQuery for SEOs
techseoconnect
PRO
0
190
The Cost Of JavaScript in 2023
addyosmani
55
9.5k
Designing Dashboards & Data Visualisations in Web Apps
destraynor
231
54k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Navigating Algorithm Shifts & AI Overviews - #SMXNext
aleyda
0
1.1k
Transcript
自動追従ロボットにおける オプティカルフローセンサを用いた オドメトリとその評価 令和5年12月16日 松本昂大 卒業研究最終発表会
背景 背景 • ECの発達 • 人手不足 • 高齢化 省力 省人化
• 高まる自動追従ロボットのニーズ • 生活支援ロボットに対する期待 屋内自動 追従型 ロボット • 倉庫内の輸送補助 • ショッピングカートの自動化 1
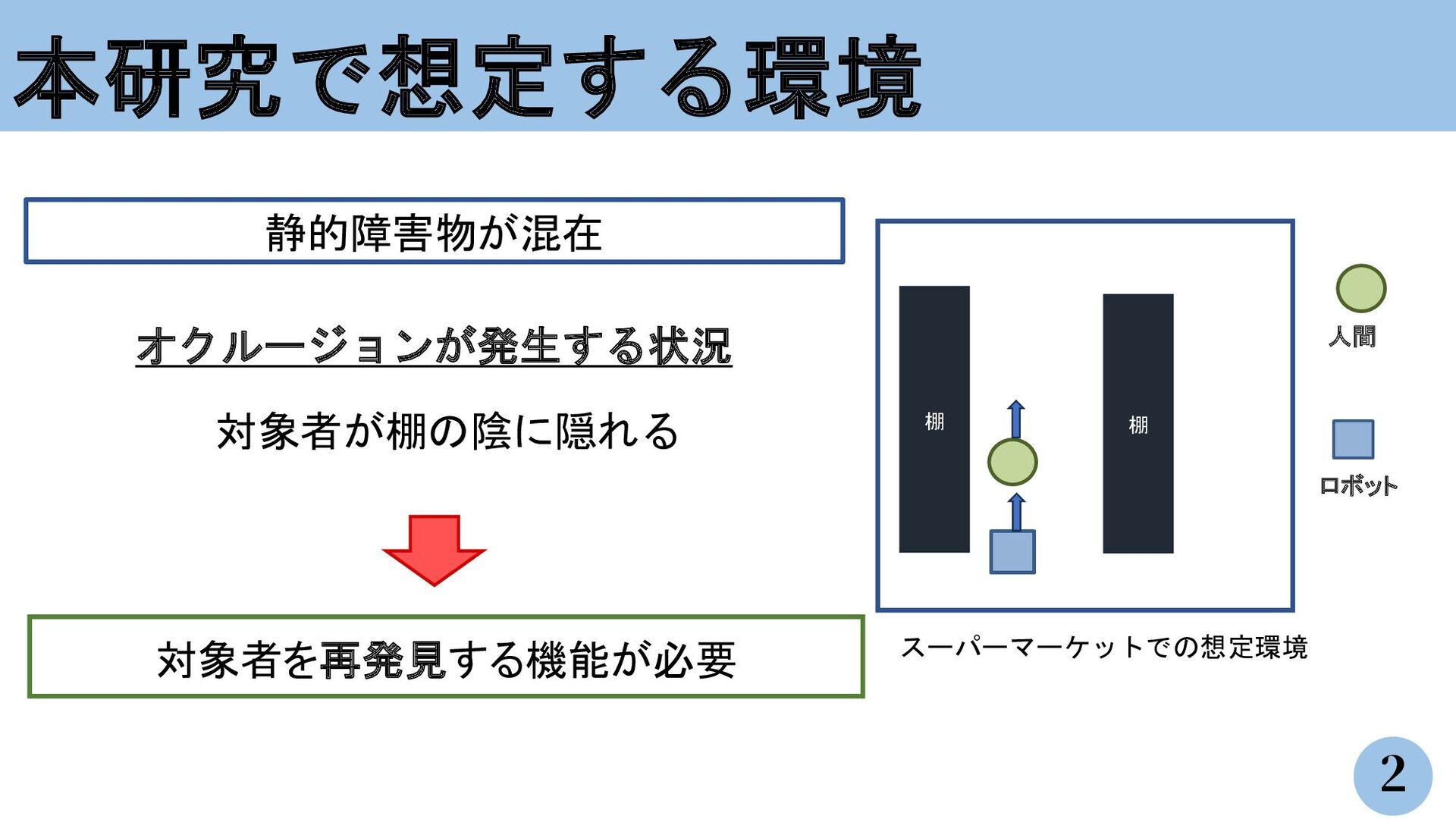
本研究で想定する環境 2 オクルージョンが発生する状況 人間 ロボット 棚 棚 静的障害物が混在 対象者を再発見する機能が必要 スーパーマーケットでの想定環境
対象者が棚の陰に隠れる
従来研究 3 <倉上氏らのPDR法を用いたオクルージョンへの対応策[1]> ➢ 通常時 • 対象者に装着した赤外線LEDマーカを追尾 ➢ オクルージョン発生時 •
PDR法により移動距離・移動方向算出 ➢ PDR(Pedestrian Dead-Reckoning)による対象者の位置推定 • 加速度から歩数 • 角加速度から進行方向 • 移動距離 = 歩幅 x 歩数 • 初期位置に移動距離を加算 PDRベルト 対象者軌跡のトレース× 障害物回避×
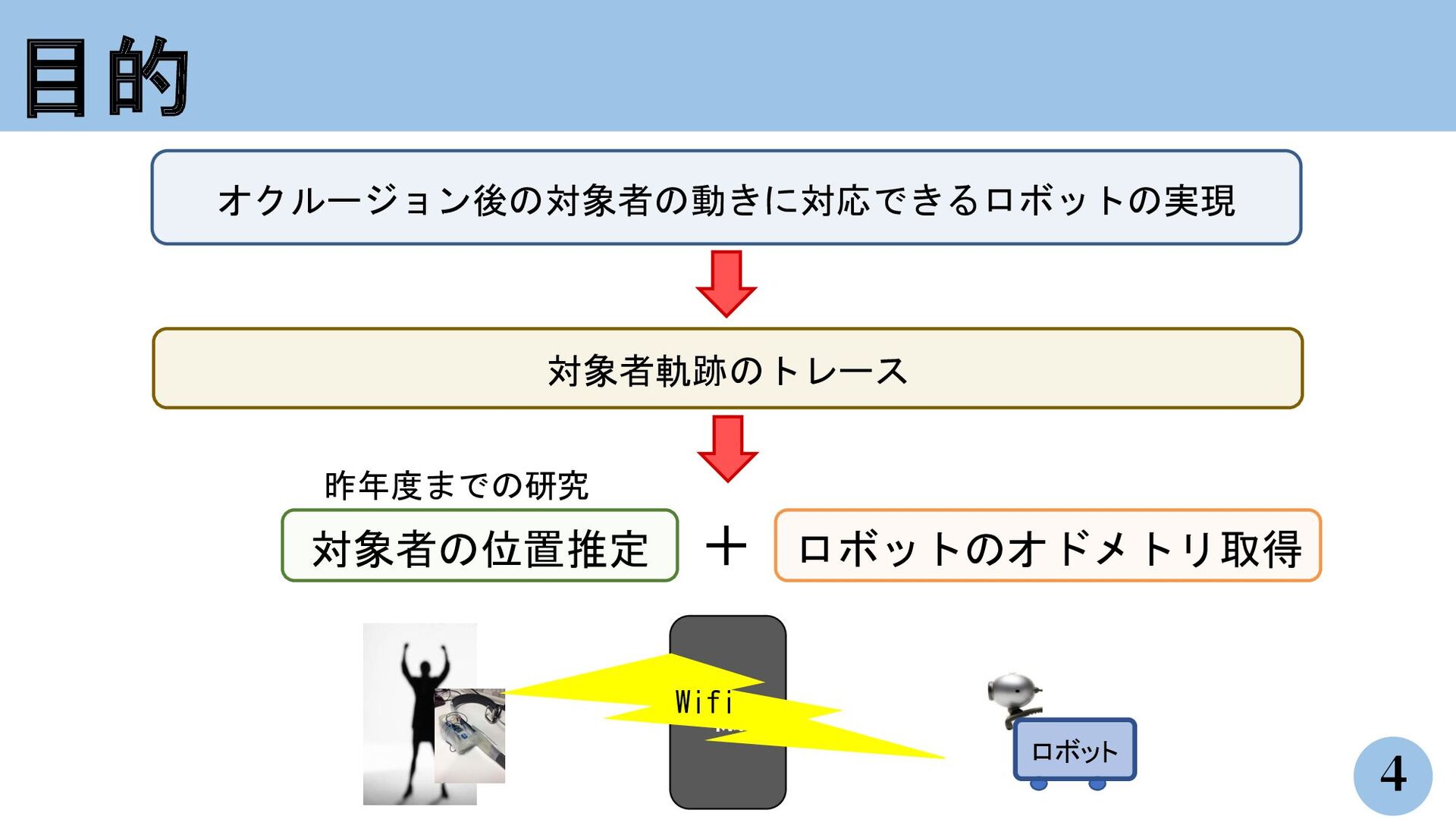
目的 4 棚 オクルージョン後の対象者の動きに対応できるロボットの実現 対象者の位置推定 ロボットのオドメトリ取得 + ロボット Wifi 昨年度までの研究
対象者軌跡のトレース
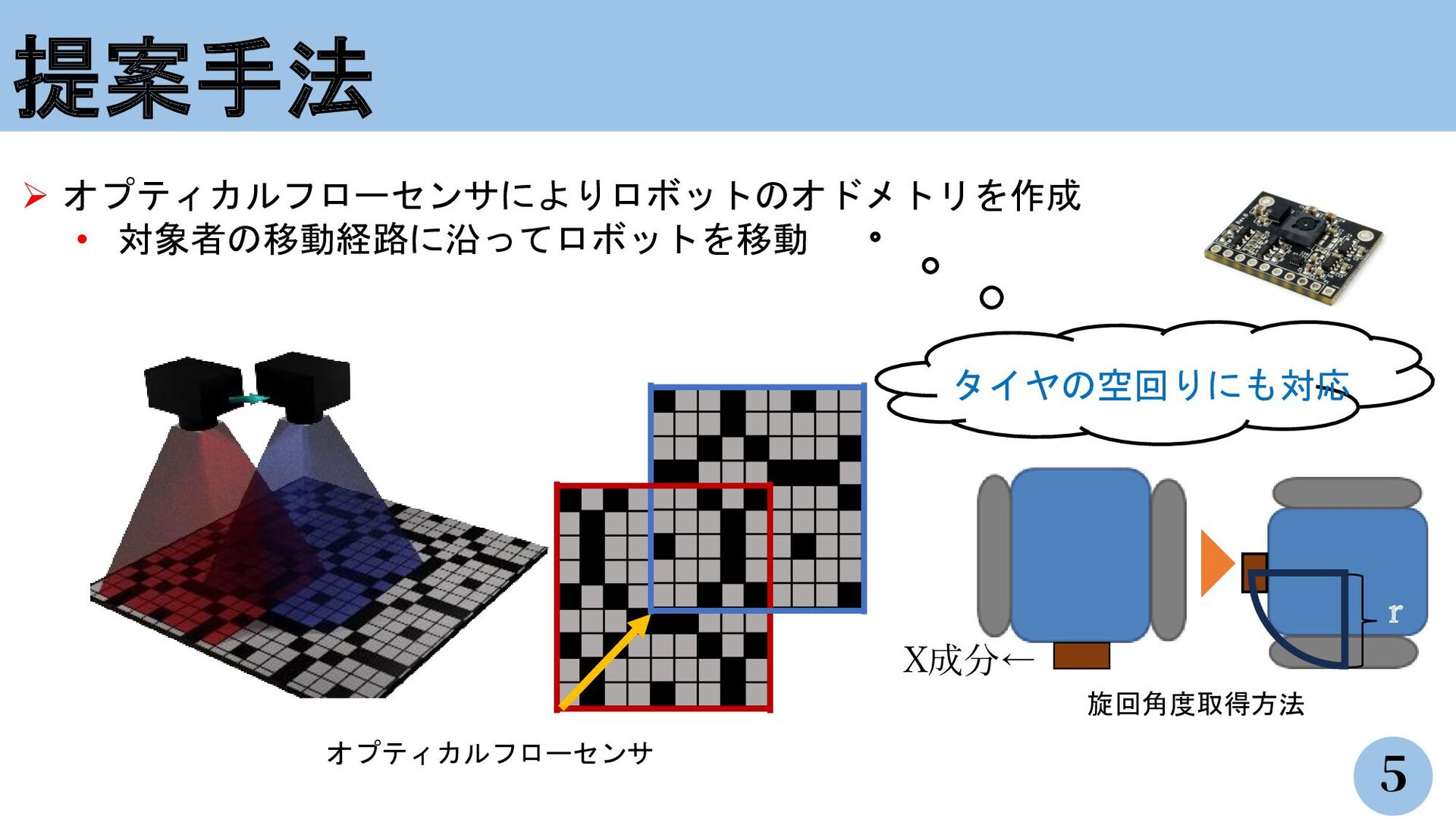
提案手法 5 ➢ オプティカルフローセンサによりロボットのオドメトリを作成 • 対象者の移動経路に沿ってロボットを移動 タイヤの空回りにも対応 X成分← r オプティカルフローセンサ
旋回角度取得方法
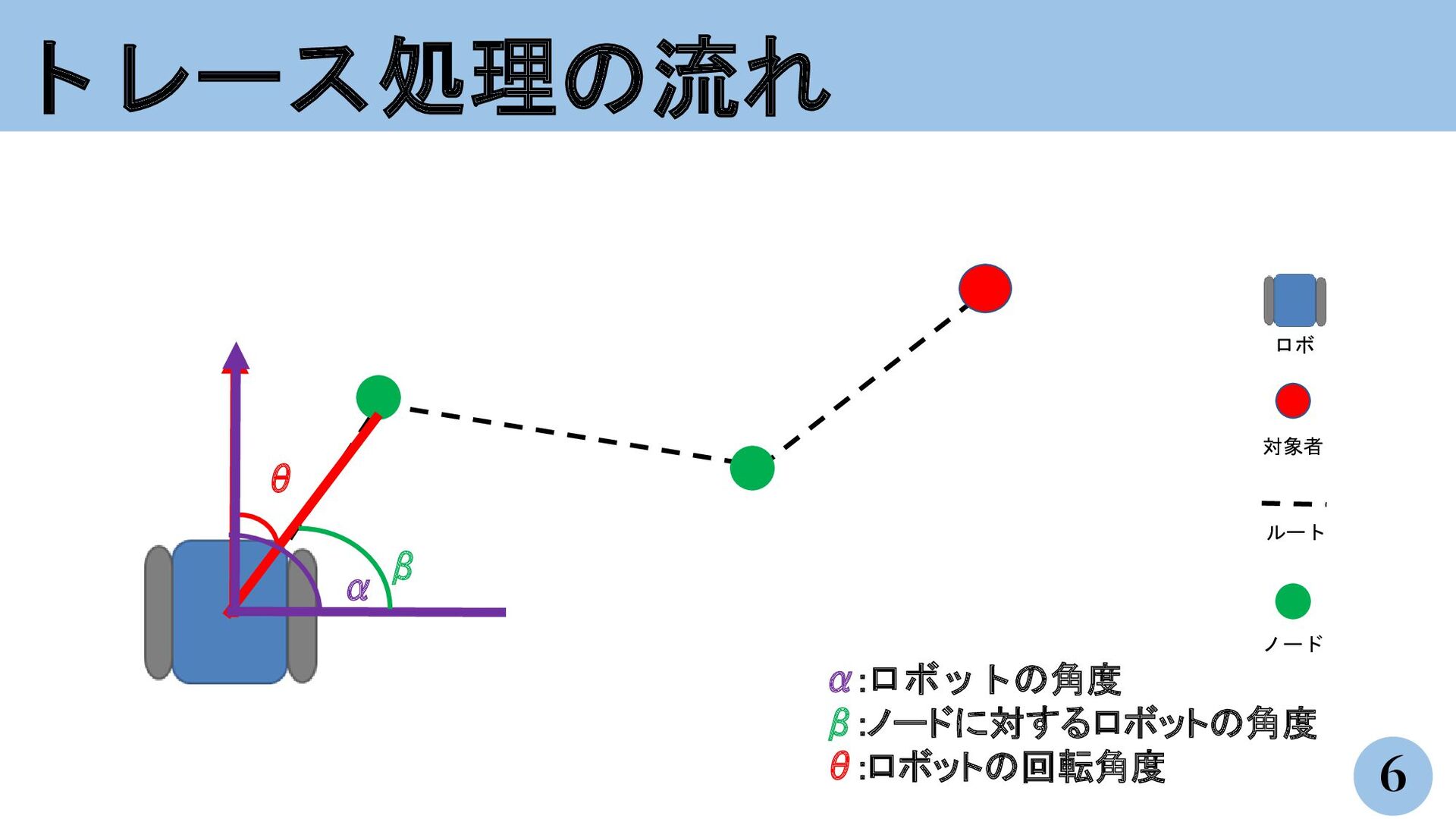
トレース処理の流れ 6 ロボ ルート 対象者 ノード θ α β α:ロボットの角度
β:ノードに対するロボットの角度 θ:ロボットの回転角度
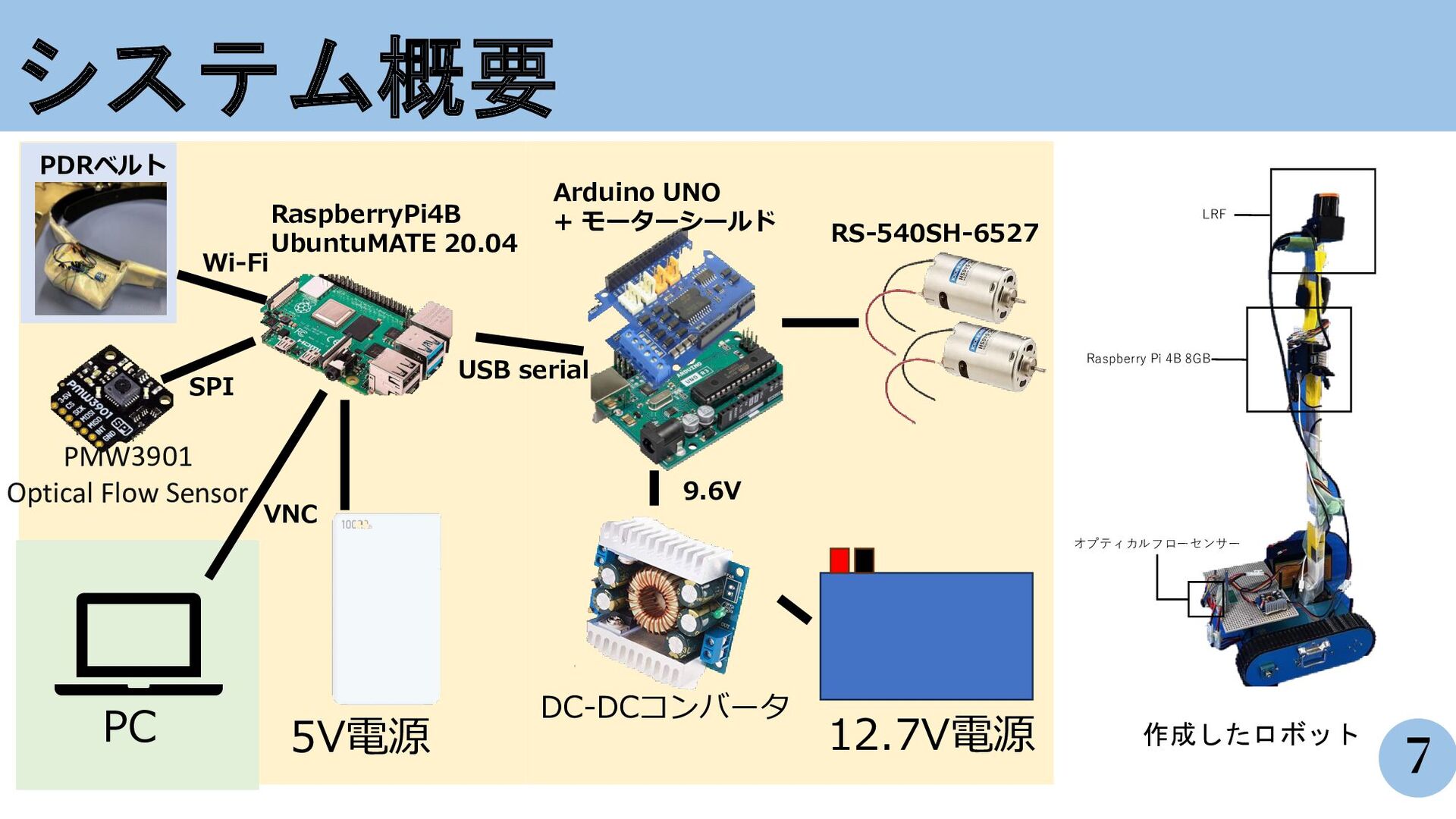
システム概要 7 Raspberry Pi 4B 8GB オプティカルフローセンサー LRF 作成したロボット 12.7V電源
5V電源 RaspberryPi4B UbuntuMATE 20.04 Arduino UNO + モーターシールド RS-540SH-6527 SPI USB serial PC VNC 9.6V DC-DCコンバータ PMW3901 Optical Flow Sensor Wi-Fi PDRベルト
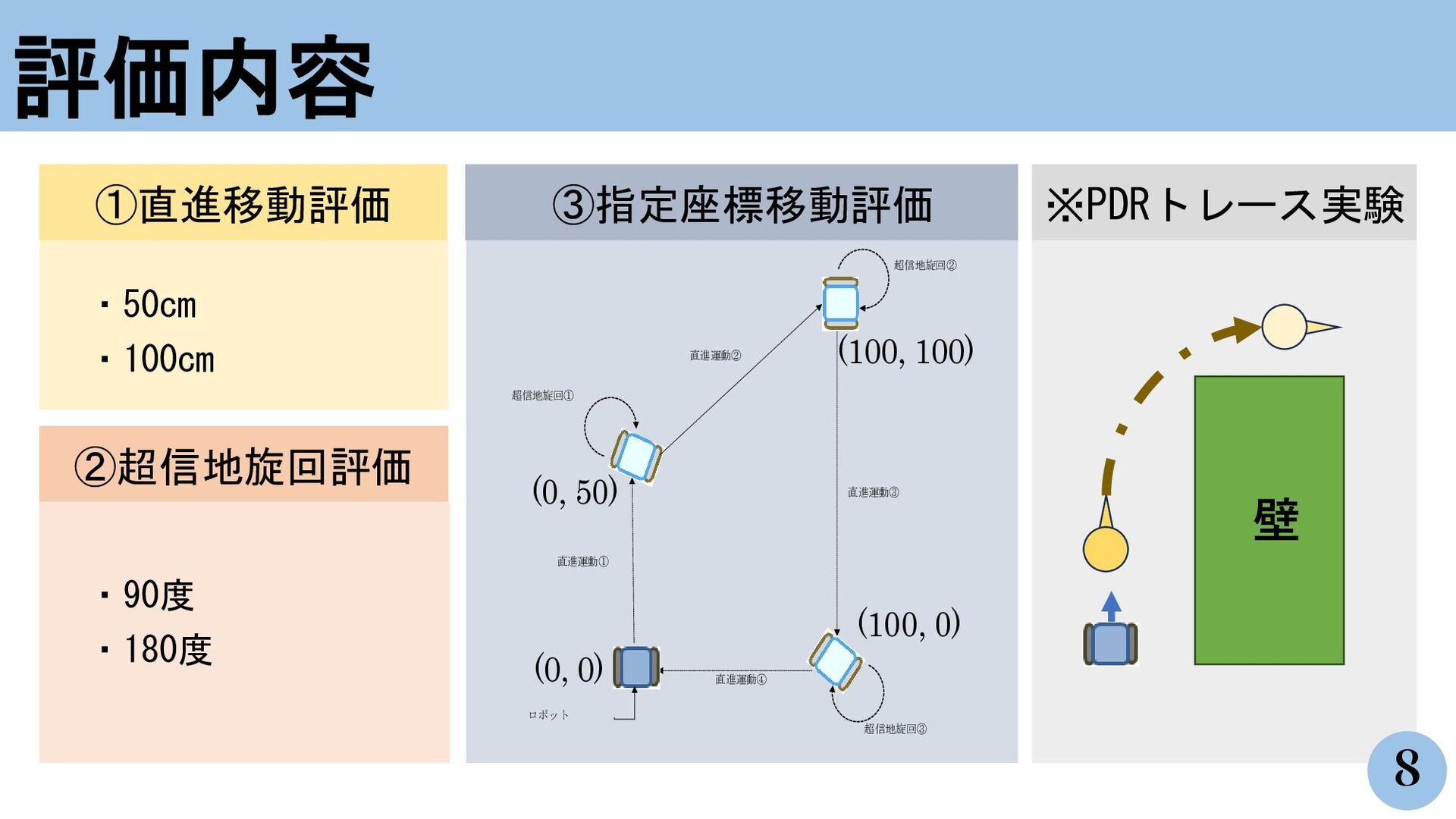
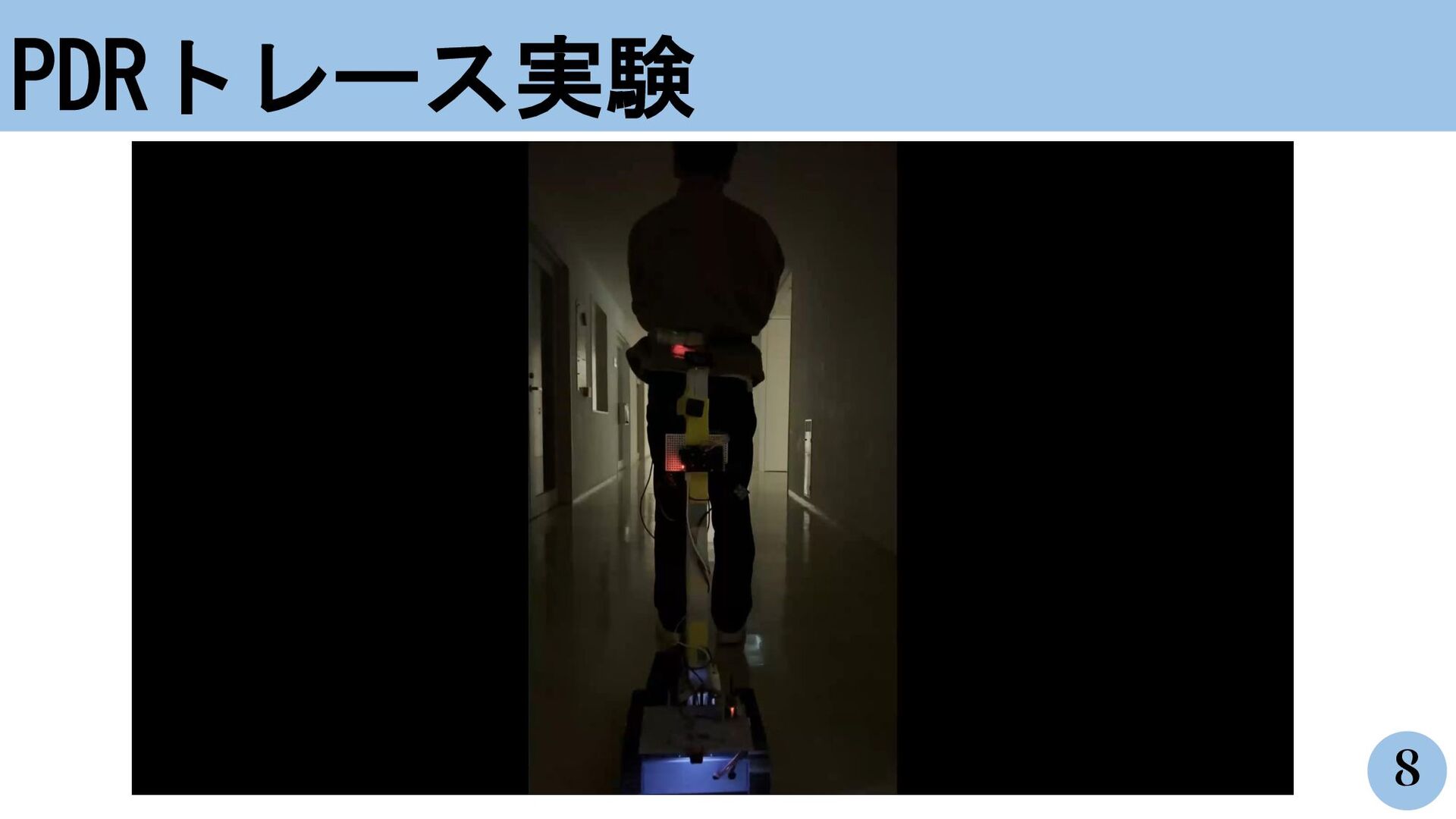
評価内容 ①直進移動評価 ②超信地旋回評価 ③指定座標移動評価 ・50cm ・100cm ・90度 ・180度 ロボット 直進運動①
超信地旋回① 直進運動② 直進運動③ 直進運動④ 超信地旋回② 超信地旋回③ (0, 0) (0, 50) (100, 100) (100, 0) ※PDRトレース実験 8 壁
①直進移動評価②超信地旋回評価 9 移動 量 最小 [%] 最大 [%] 平均 [%]
直進移動 0.5 m 0.4 59.8 19.1 1.0 m 1.6 17.2 6.6 超信地旋回 90度 0.0 15.0 5.7 180度 0.0 0.0 0.0 直進移動・超信地旋回の誤差
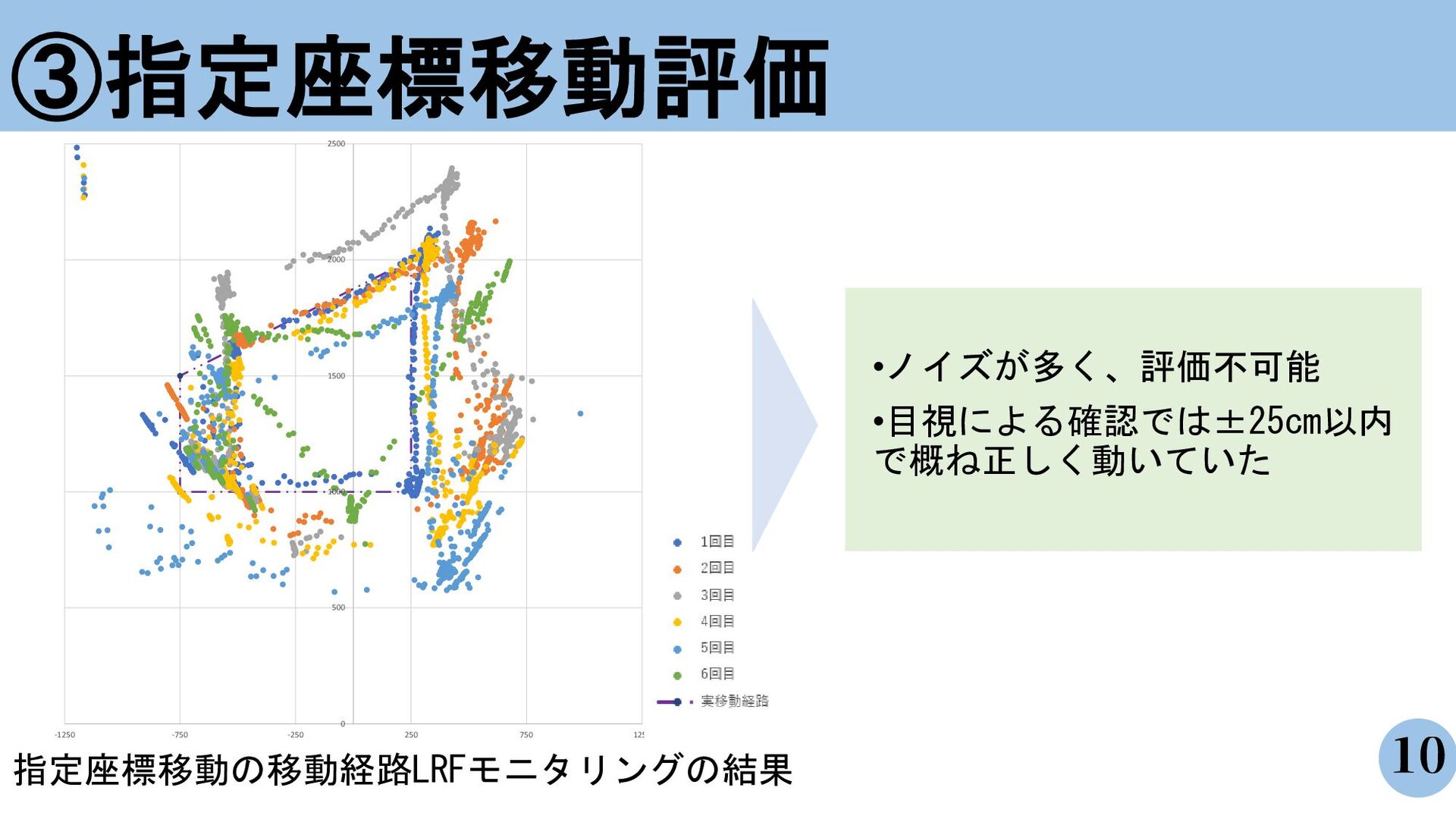
③指定座標移動評価 0 500 1000 1500 2000 2500 -1250 -750 -250
250 750 1250 1回目 2回目 3回目 4回目 5回目 6回目 実移動経路 指定座標移動の移動経路LRFモニタリングの結果 •ノイズが多く、評価不可能 •目視による確認では±25cm以内 で概ね正しく動いていた 10
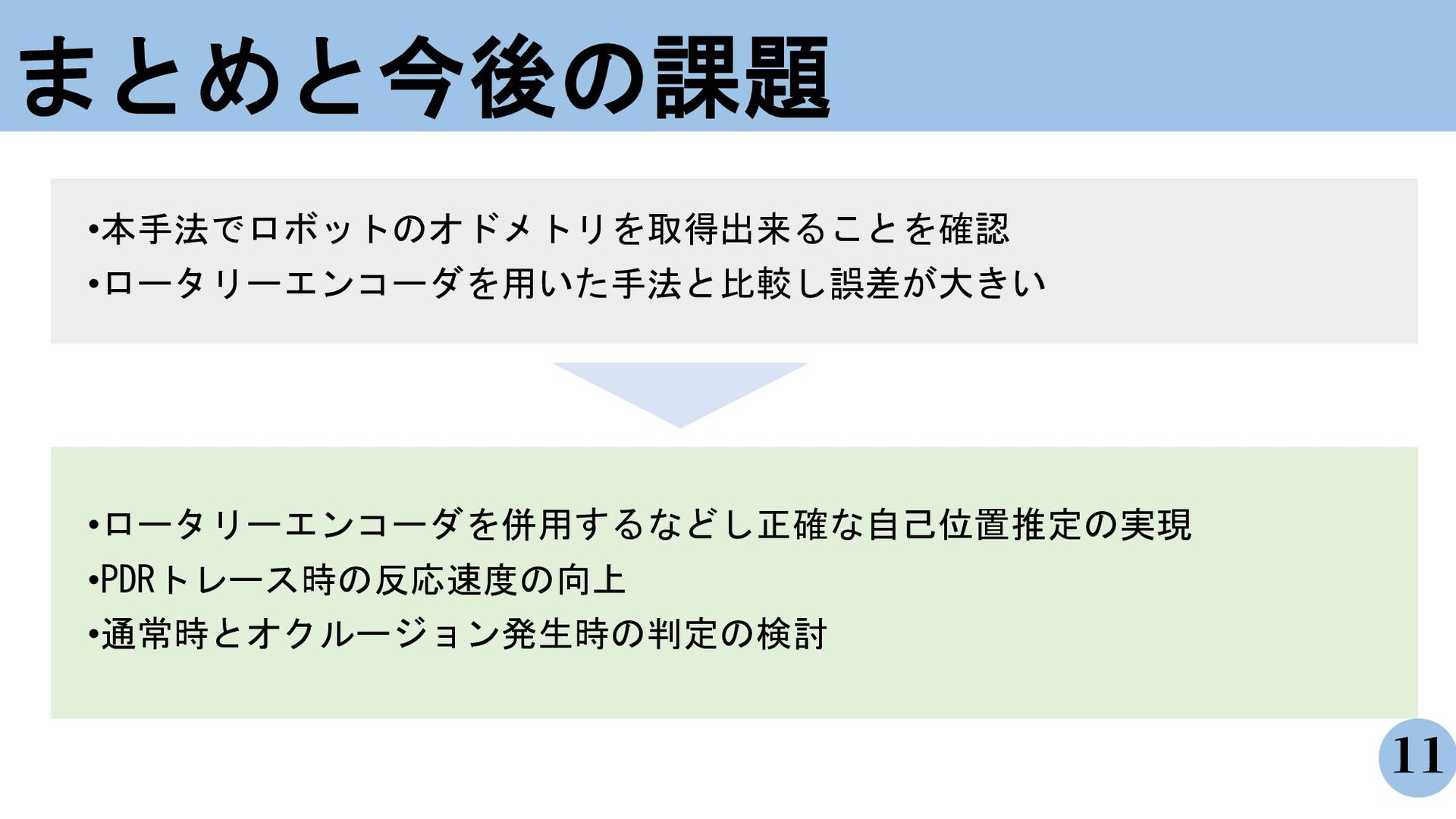
まとめと今後の課題 11 •本手法でロボットのオドメトリを取得出来ることを確認 •ロータリーエンコーダを用いた手法と比較し誤差が大きい •ロータリーエンコーダを併用するなどし正確な自己位置推定の実現 •PDRトレース時の反応速度の向上 •通常時とオクルージョン発生時の判定の検討
参考文献 12 [1]渡辺勇人,矢吹太朗,佐久田博司,“RFIDを用いた室内の位置推定方法”, 情報処理学会第69回全国大会,3-256,2007. [2]南山尚久,安藤吉伸,水川 真,“分散配置測域センサによる環境内物体の位置情報取 得に関する研究”,Proceedingsof the 2008 JSME
Gonferenceon Robotics and Mechatronics,No.08-4,2P1-H16(1)-(2),2008. [3]倉上祐樹, 新井浩志, "自動追従ロボットにおけるPDRを用いたオクルージョン対策", 電子情報通信学会, 2016年総合大会講演論文集, 2016_情報・システム(2), p.227,D-22-3, 2016.
自動追従ロボットにおける 対象者軌跡のトレース機能の 開発と評価 令和5年12月16日 松本昂大
PDRトレース実験 8
{kind=link}
{kind=link}
{kind=link}
![従来研究 3 <倉上氏らのPDR法を用いたオクルージョンへの対応策[1]> ➢ 通常時 • 対象者に装着した赤外線LEDマーカを追尾 ➢ オクルージョン発生時 •](https://files.speakerdeck.com/presentations/da792e156c2c49faa036324a1463a162/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![①直進移動評価②超信地旋回評価 9 移動 量 最小 [%] 最大 [%] 平均 [%]](https://files.speakerdeck.com/presentations/da792e156c2c49faa036324a1463a162/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
![参考文献 12 [1]渡辺勇人,矢吹太朗,佐久田博司,“RFIDを用いた室内の位置推定方法”, 情報処理学会第69回全国大会,3-256,2007. [2]南山尚久,安藤吉伸,水川 真,“分散配置測域センサによる環境内物体の位置情報取 得に関する研究”,Proceedingsof the 2008 JSME](https://files.speakerdeck.com/presentations/da792e156c2c49faa036324a1463a162/slide_12.jpg){kind=link}
{kind=link}
{kind=link}