Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
DeepRacer cup本戦 ~30秒の切り方~
Search
chiaoi
December 23, 2025
31
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
DeepRacer cup本戦 ~30秒の切り方~
chiaoi
December 23, 2025
More Decks by chiaoi
See All by chiaoi
AWSを"安全に"始める
chiaoicchi
1
75
Neptune Analytics SSSP Δ-parameter
chiaoicchi
1
74
RAG入門
chiaoicchi
0
200
State machineはTurningの夢を見るか?
chiaoicchi
0
130
私なりのAIエージェントの理解と開発ツールの選び方
chiaoicchi
0
13
Fine-tuning Hands-on
chiaoicchi
0
18
kani
chiaoicchi
0
64
Trn3 UltraServer
chiaoicchi
0
31
Featured
See All Featured
Fashionably flexible responsive web design (full day workshop)
malarkey
408
67k
16th Malabo Montpellier Forum Presentation
akademiya2063
PRO
0
300
Sam Torres - BigQuery for SEOs
techseoconnect
PRO
0
450
How to audit for AI Accessibility on your Front & Back End
davetheseo
0
480
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.3k
Data-driven link building: lessons from a $708K investment (BrightonSEO talk)
szymonslowik
1
1.2k
State of Search Keynote: SEO is Dead Long Live SEO
ryanjones
0
240
Become a Pro
speakerdeck
PRO
31
6k
Product Roadmaps are Hard
iamctodd
55
12k
The innovator’s Mindset - Leading Through an Era of Exponential Change - McGill University 2025
jdejongh
PRO
1
230
brightonSEO & MeasureFest 2025 - Christian Goodrich - Winning strategies for Black Friday CRO & PPC
cargoodrich
3
760
Google's AI Overviews - The New Search
badams
0
1.1k
Transcript
DeepRacer cup 本戦のコツ ~30秒の切り方~ chiaoi
自己紹介
結果 29.522 [s]
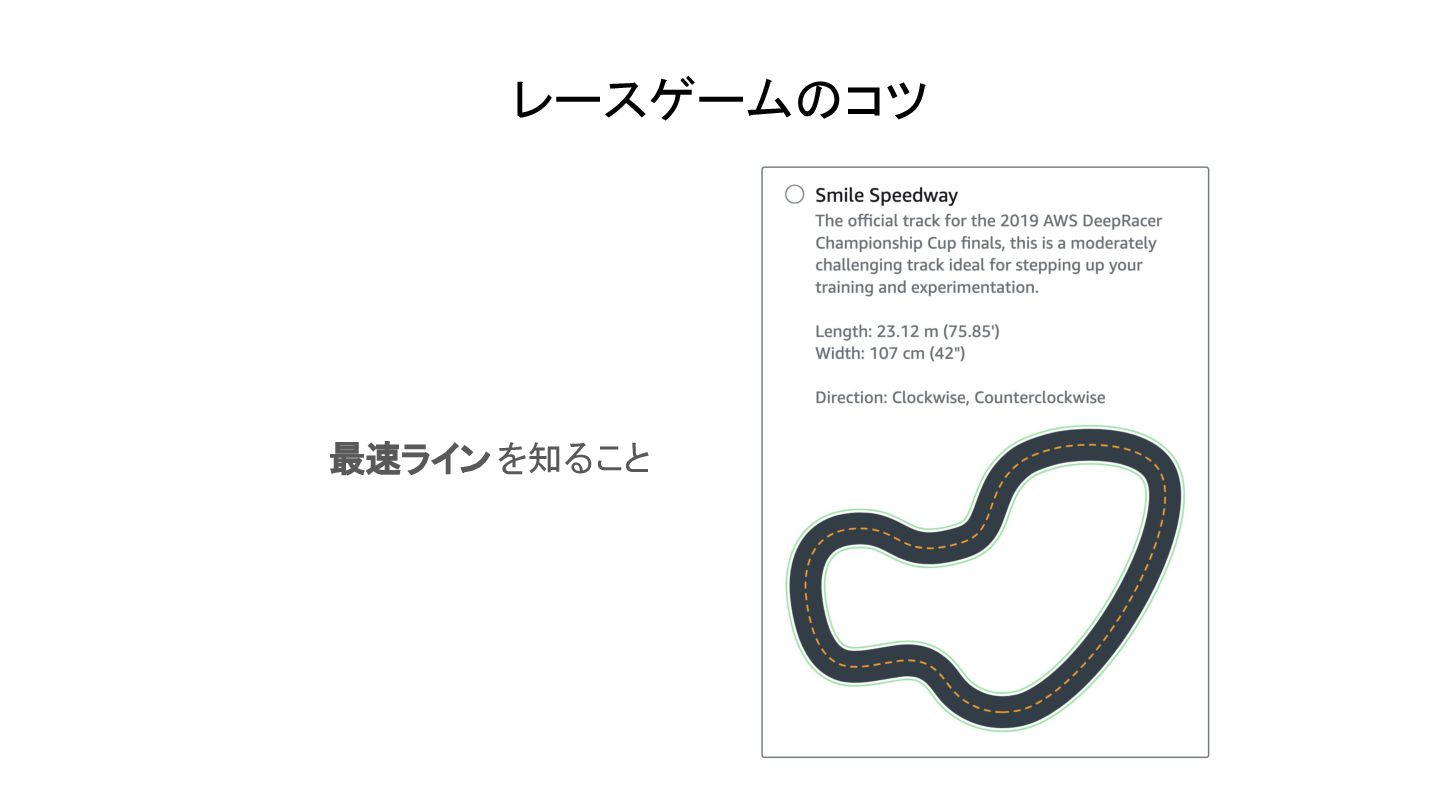
レースゲームのコツ 最速ライン を知ること
最速ライン 最速ライン を知ること → ドリフトをした方が速い? → インコースを着いた方が速い? → 大体直線だと思ってまっすぐ進んだ方が速い? →
車のスペックは?
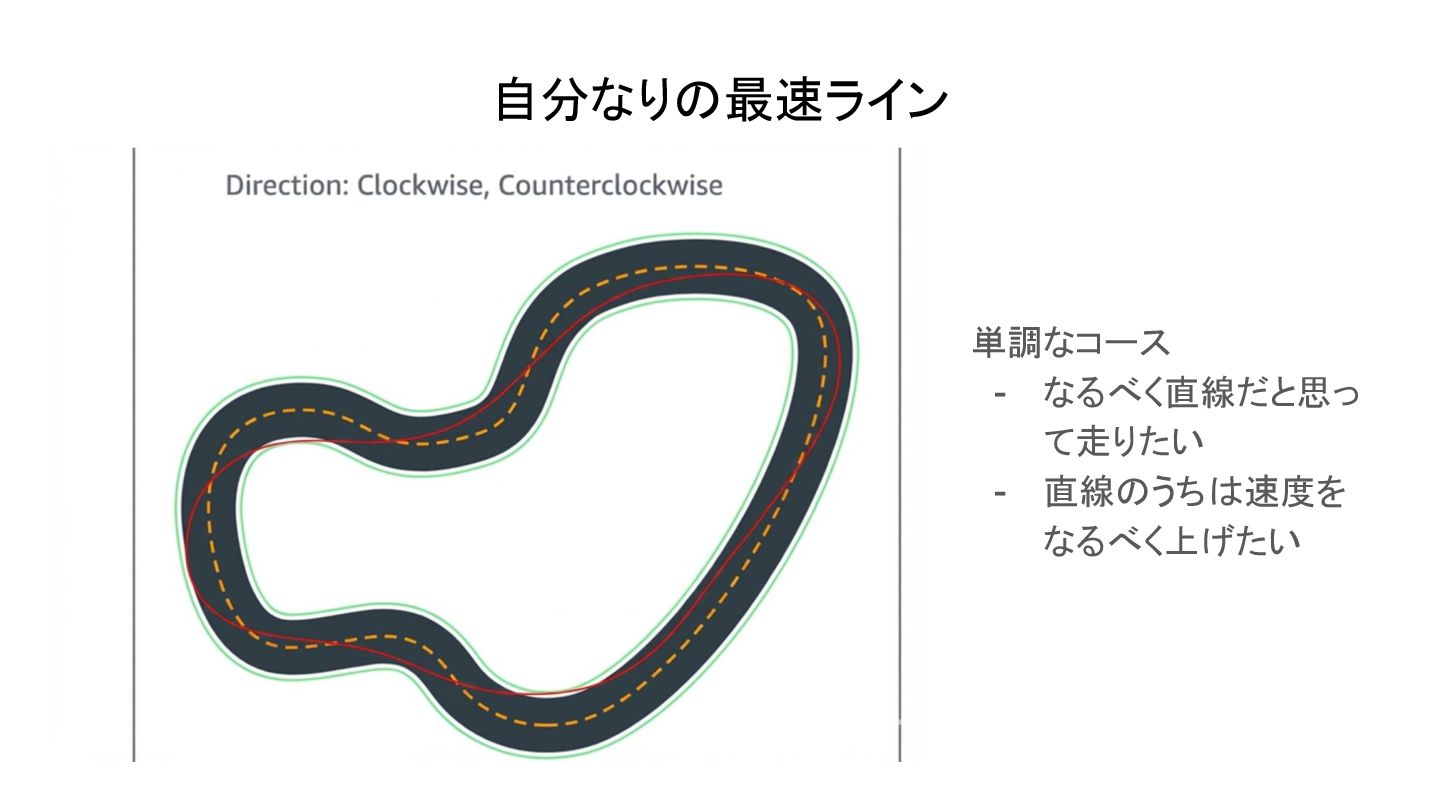
自分なりの最速ライン 単調なコース - なるべく直線だと思っ て走りたい - 直線のうちは速度を なるべく上げたい
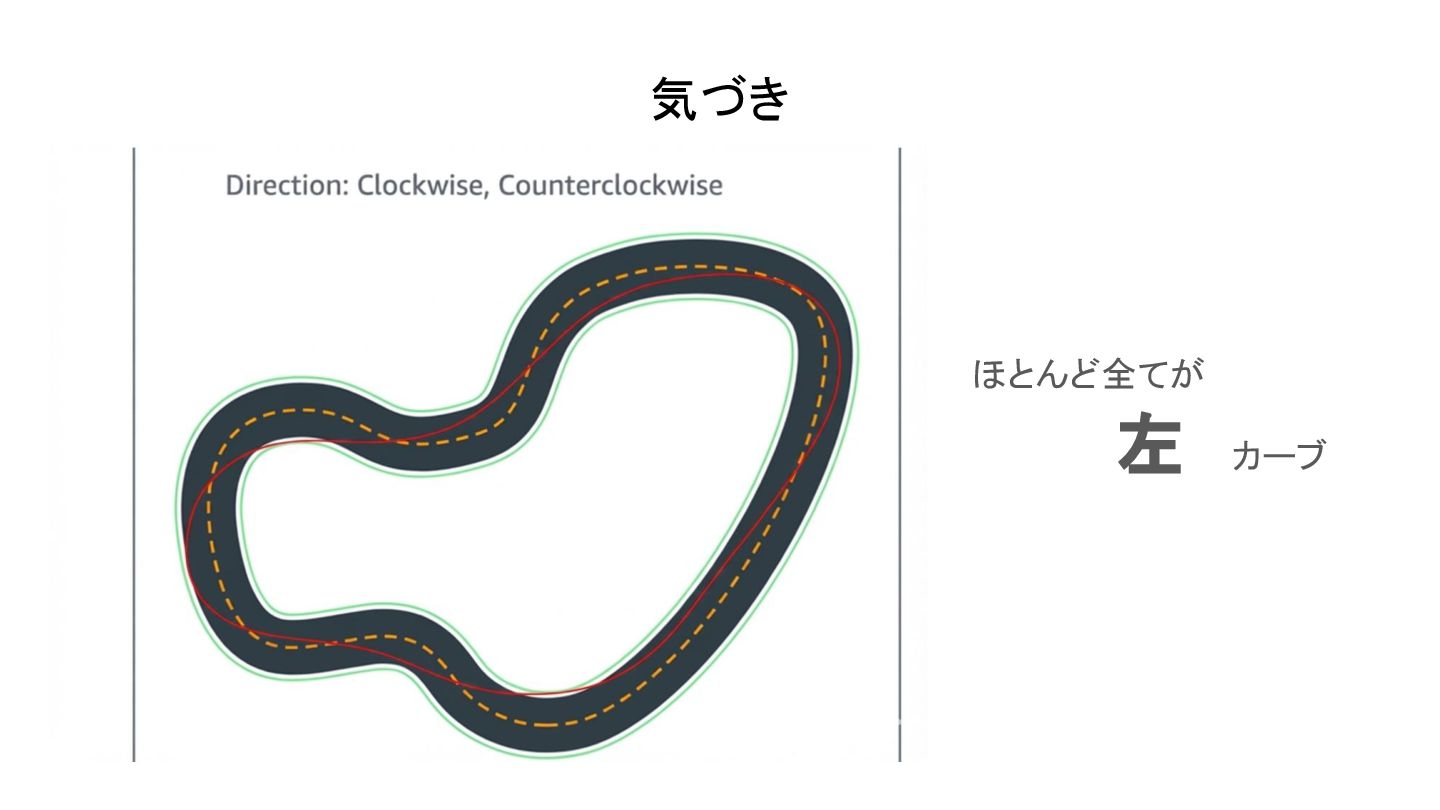
気づき ほとんど全てが 左 カーブ
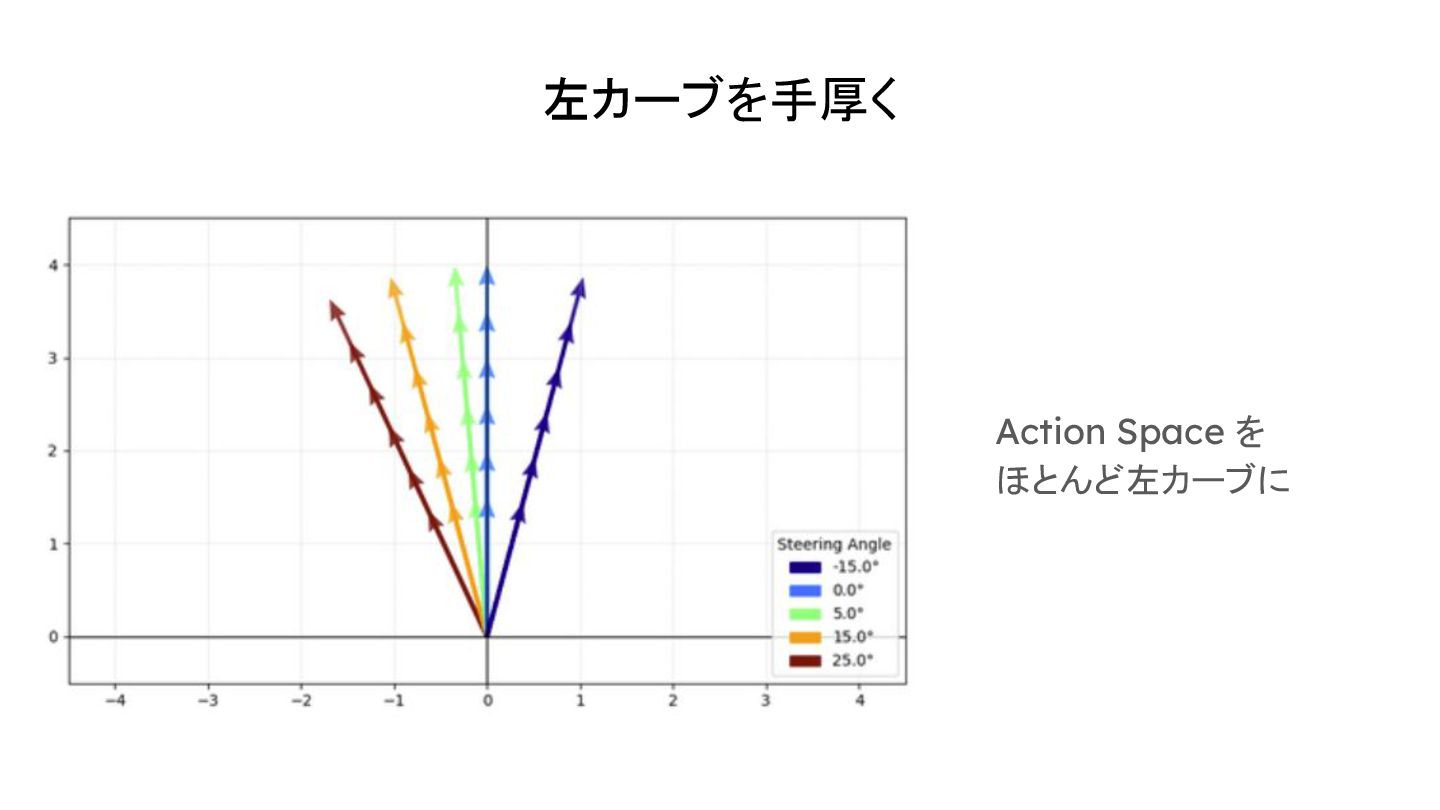
左カーブを手厚く Action Space を ほとんど左カーブに
方針①:完走できるモデルから改良する 最初から速さを重視する → コースアウトが頻発する → 完走報酬を得る機会が少ない → 「完走」がいい行動として学習されない 完走することを重視する →
最初の学習で「完走」がいい行動として学べる → そこから改良していけば、「完走」をしながら 徐々 に速く改良できる Curriculum learning (Bengio et al., ICML 2009)
方針②:価値観の軸をぶらさない 継続学習で方針を変える → 学習済みの行動が否定される → 学習済みである意味がなくなる → 収束したときには学習済みである意味がなくなる → 方針を大きく変えるときは最初から学習したほうが良い
Proximal Policy Optimization Algorithms (Schulman et al. 2017)
方針③:なるべく直進 なるべく直進をしたい → 迷ったら直進を優先する → 小さなうねりや微妙な曲がりを「直線」と判定する → コースの先読みをして全体のコースの角度を判定し て 車体の向きがそれに沿うようにする
方針④:直線では最高速度を保つ 直線が多めのコース → 直線はスピードが出しやすいので最高速度をなるべ く 保ちたい
方針⑤:その他 完走ボーナス 目標ステップ
方針⑥:2回目の学習はさらに攻める - なるべく直進をさらに先のカーブまで把握する - カーブ強度で場合分けをして速度調整を細かく - 直線での報酬をさらに上げる - ステップ数をさらに短くする
方針⑦:カーブでは常に左を走ることを目標に 左カーブが多い → カーブでは常に左側にいる方がインを曲がれる
実装方法 これまでの方針を全てまとめて、 Claude に任せる
まとめ 実装自体は、LLMで可能になった。 → 実装をする前の「考察」の部分は、LLMよりも人間がやった方が良かった。 → 「考察」も、どのラインを走ったかを図示するコードや速度のグラフを表 示する コードなどを、LLMに作らせることで捗った。
{kind=link}
{kind=link}
![結果 29.522 [s]](https://files.speakerdeck.com/presentations/94691ed3c50543ea99894251bc8586ee/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}