Марку нравится функциональное программирование и он хотел бы активнее применять его в программистской практике. Его основные проекты написаны на C#, но он пытается писать их на F#, когда это возможно. Функциональное программирование нравится Марку настолько, что я пытаюсь его популяризировать. Для популяризации естественно нужны учебные материалы, понятные классическим программистам. К сожалению, подобных хороших материалов не очень много. В качестве примеров мы видим вычисление факториалов или чисел Фибоначчи, которые вы вряд ли встретите в реальной практике.
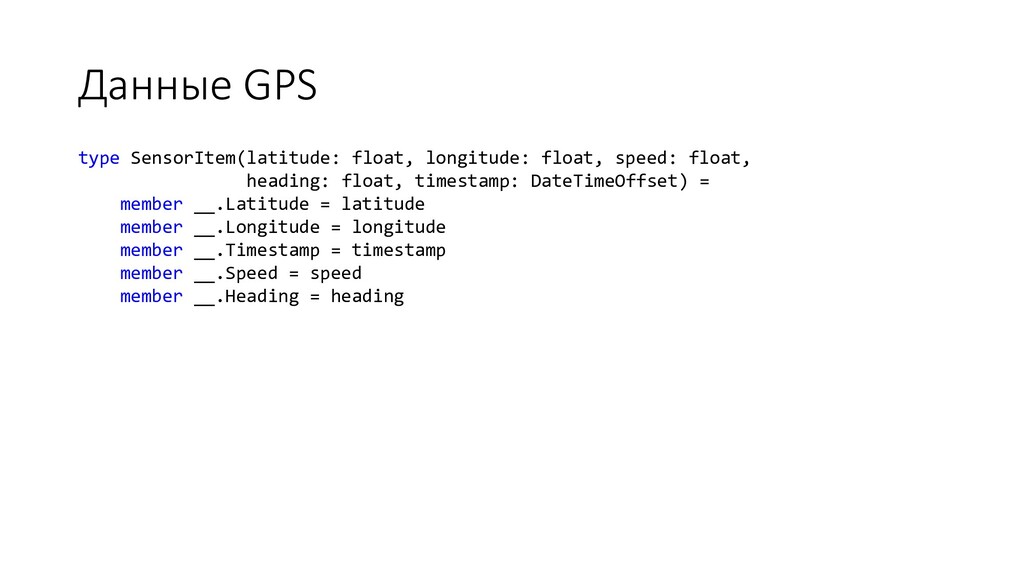
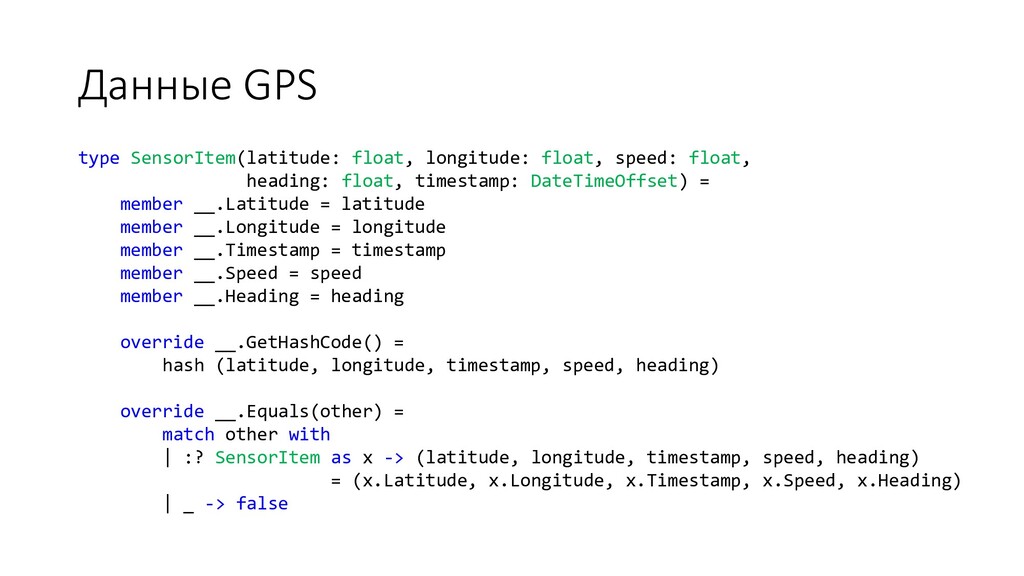
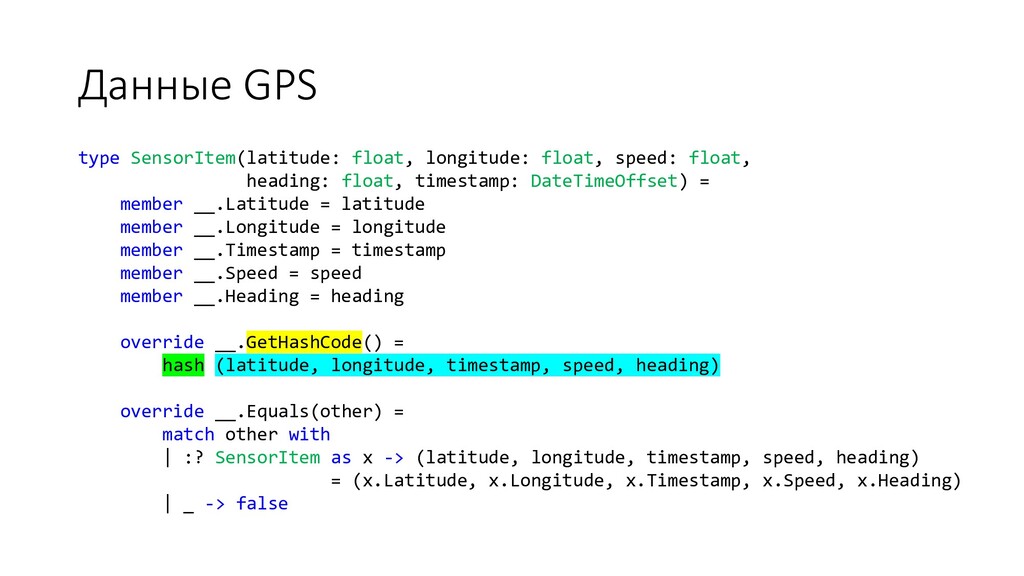
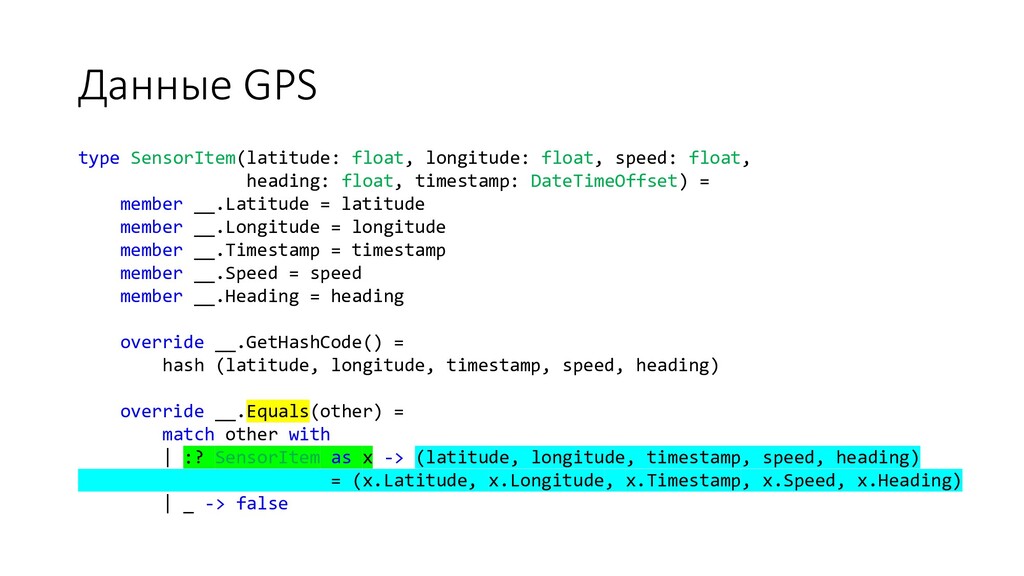
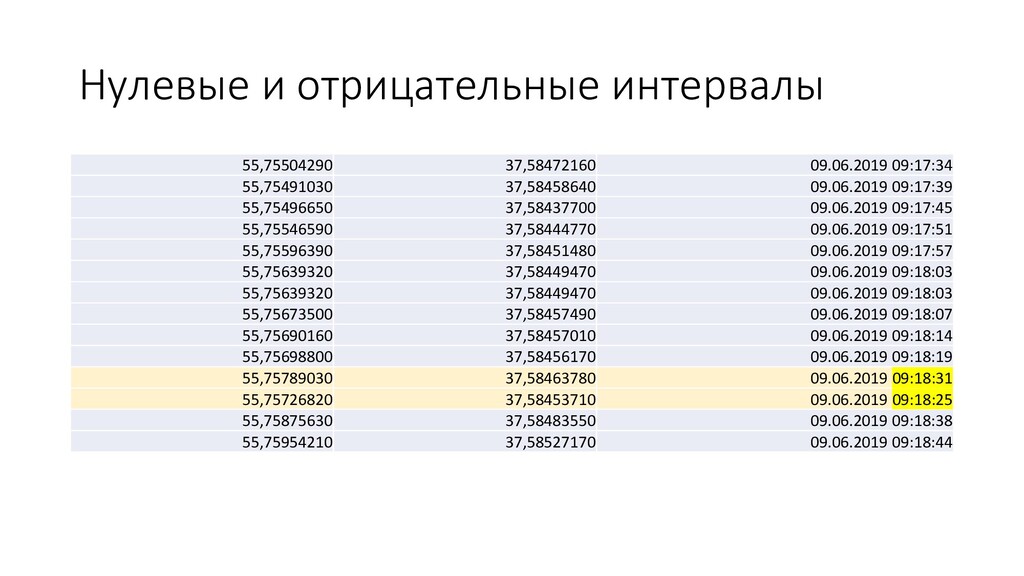
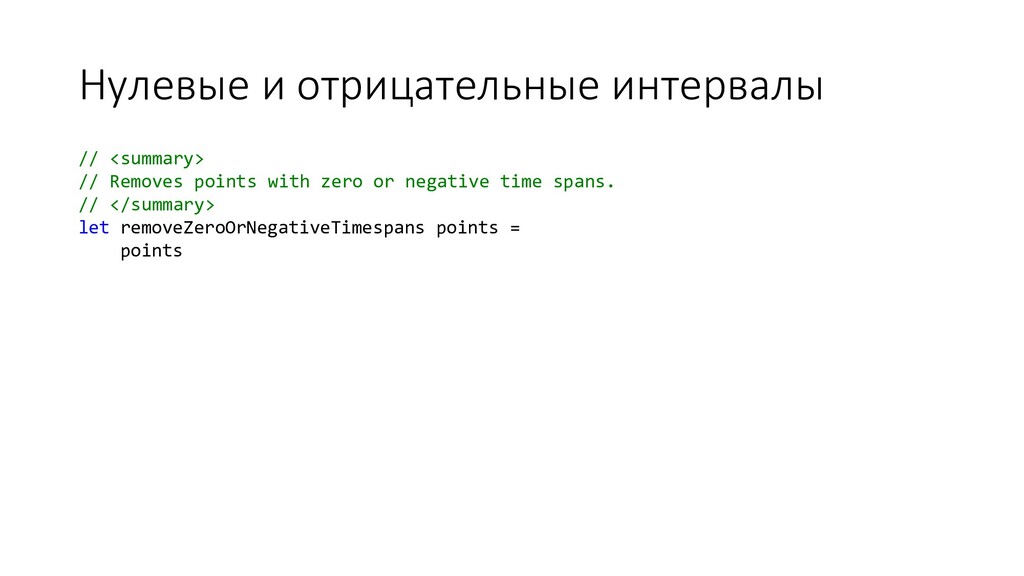
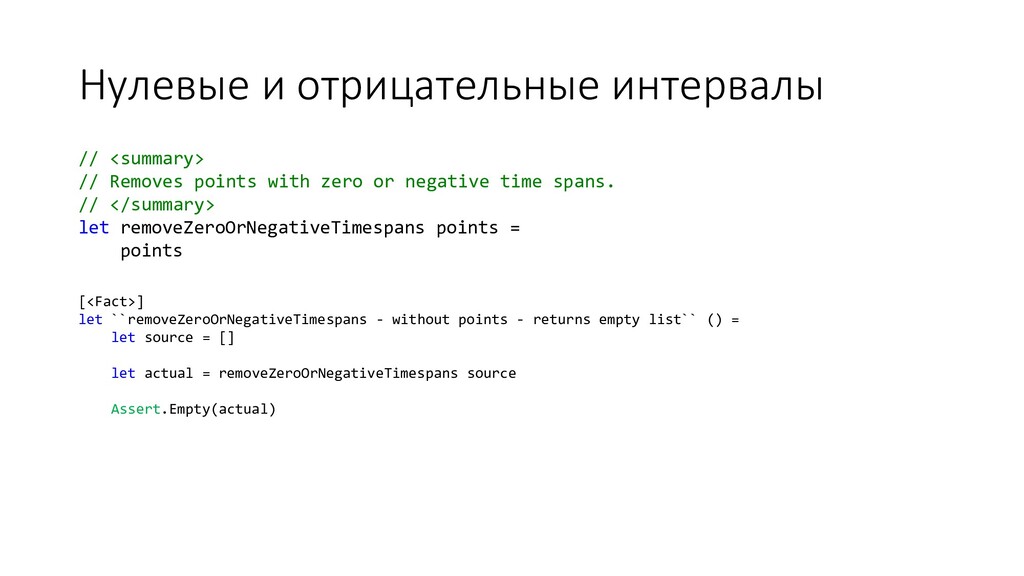
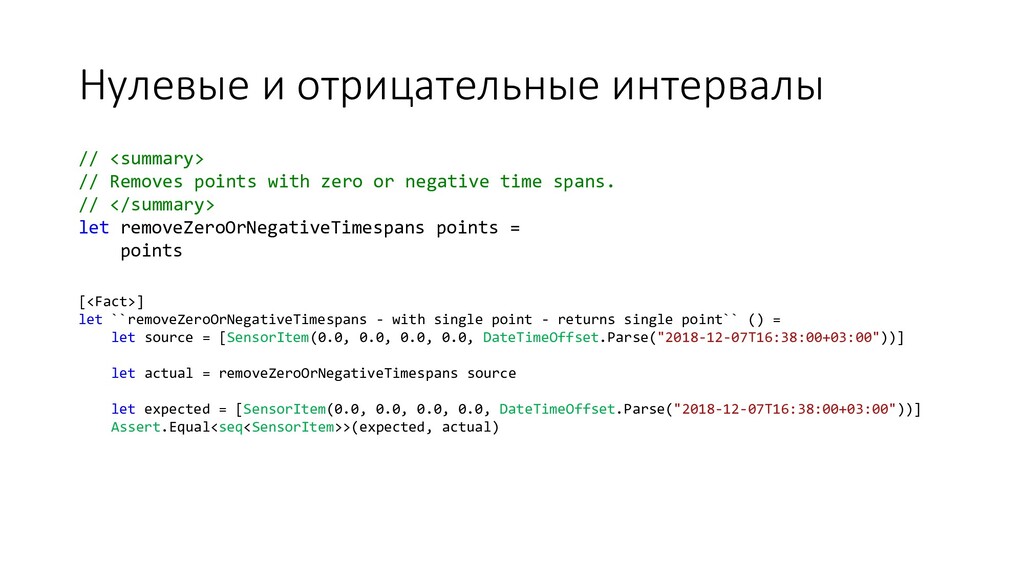
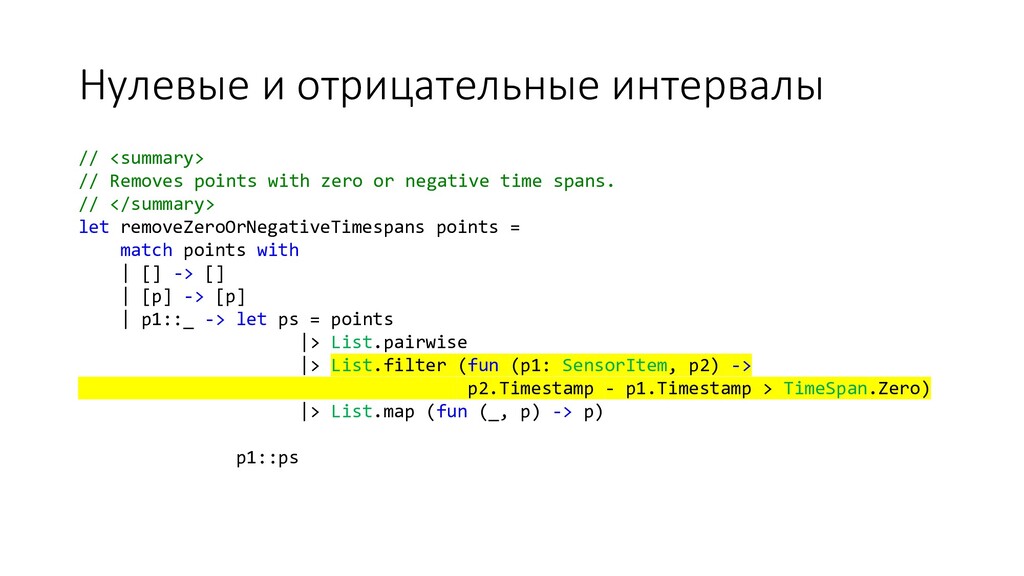
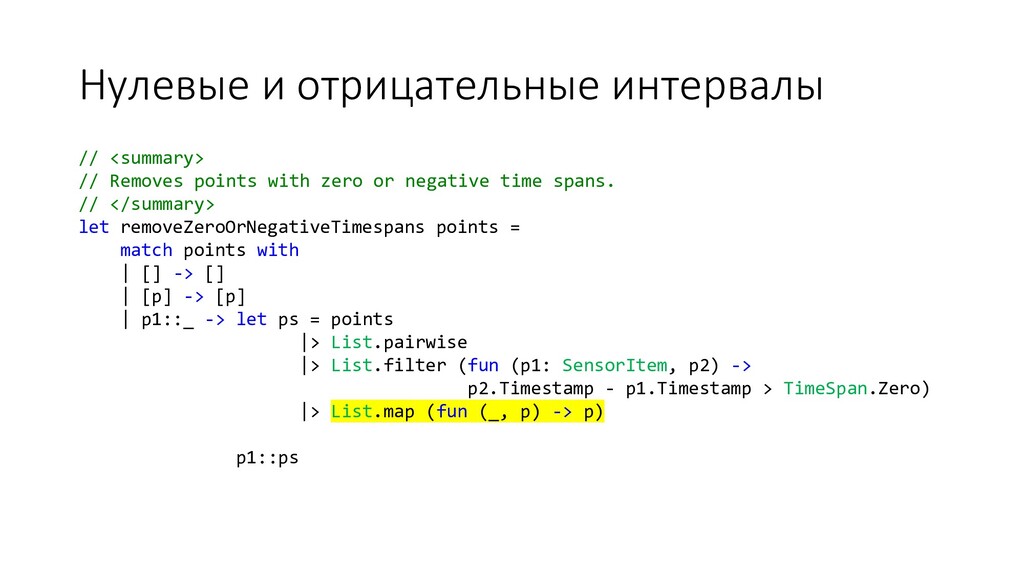
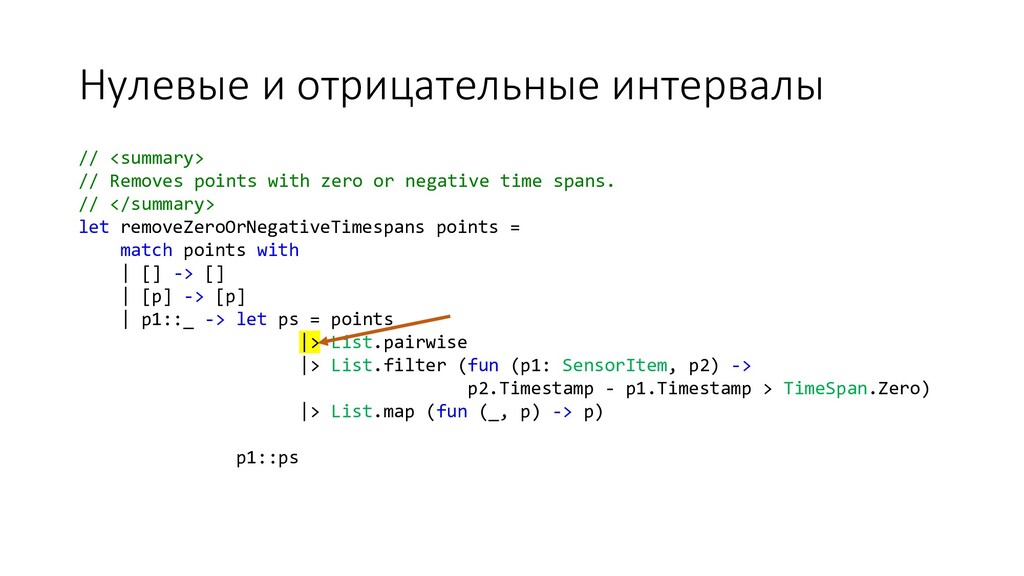
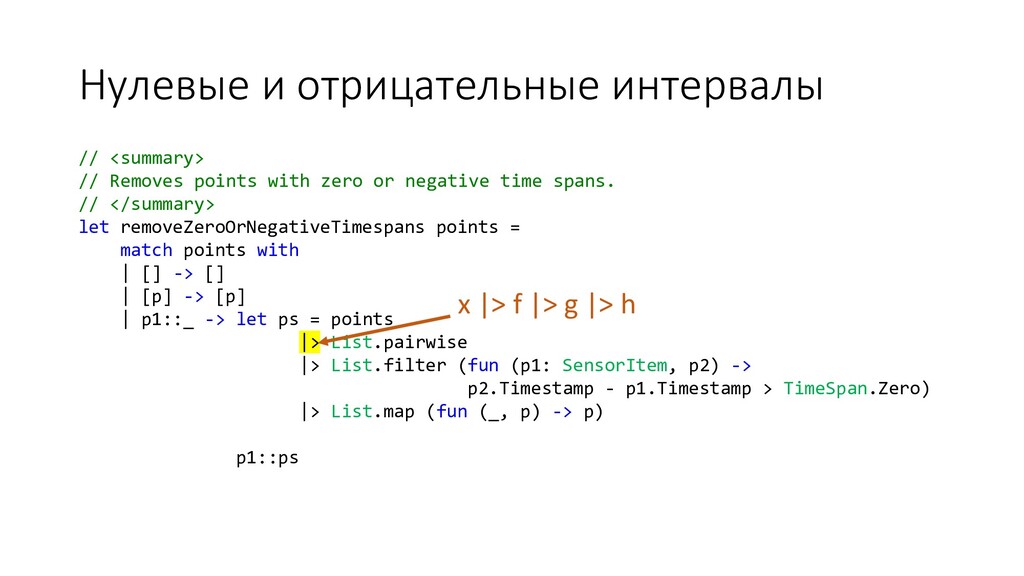
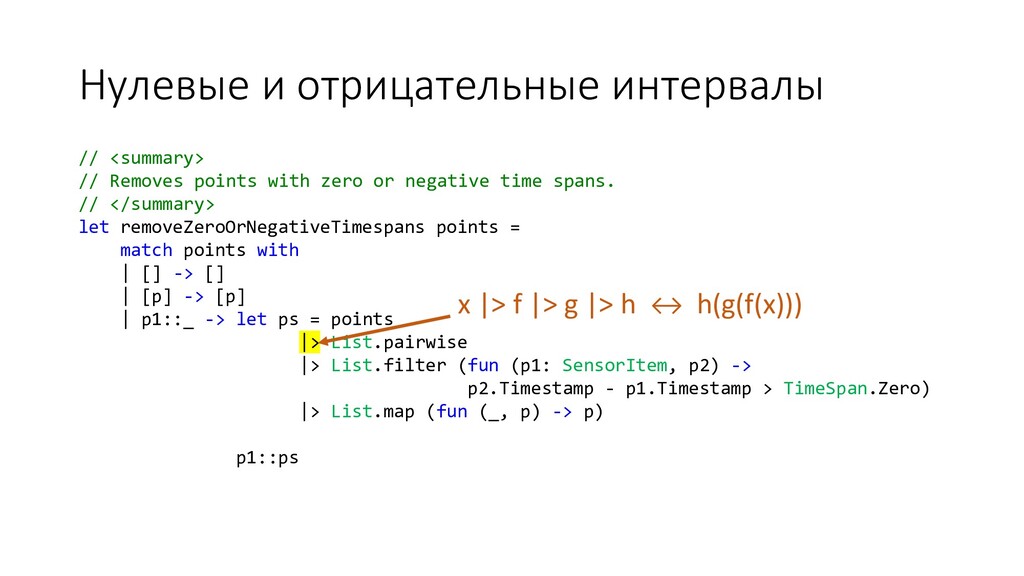
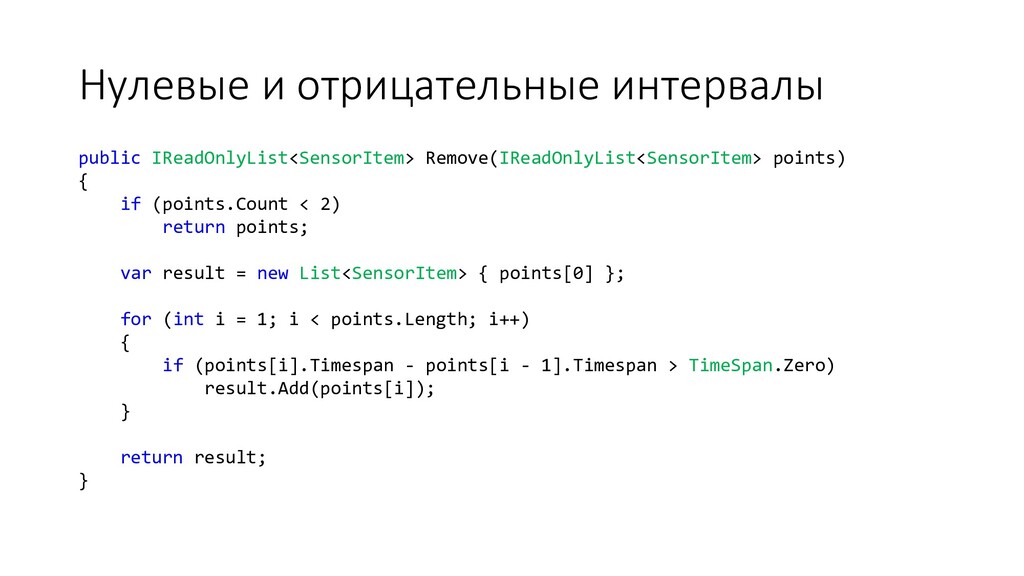
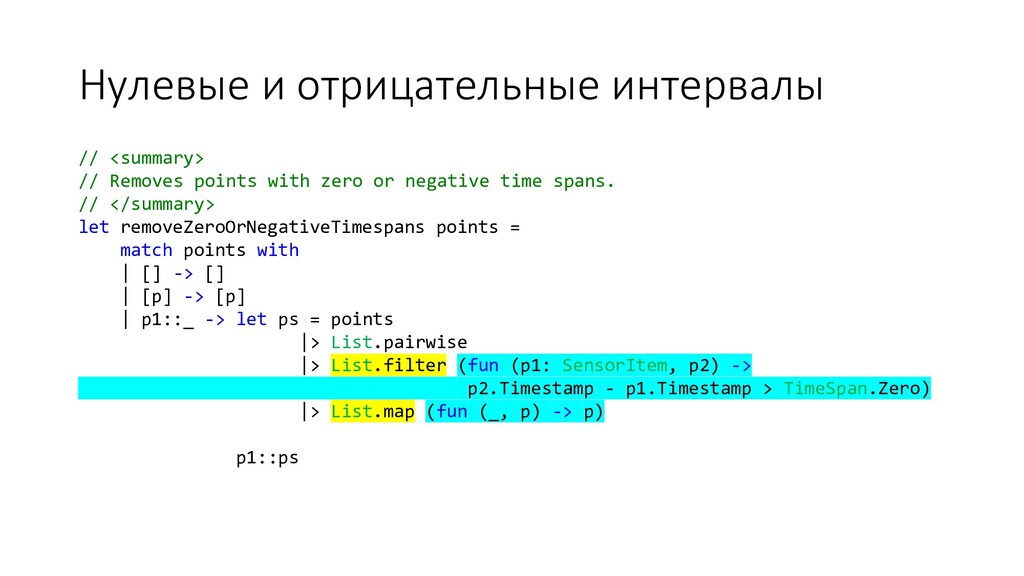
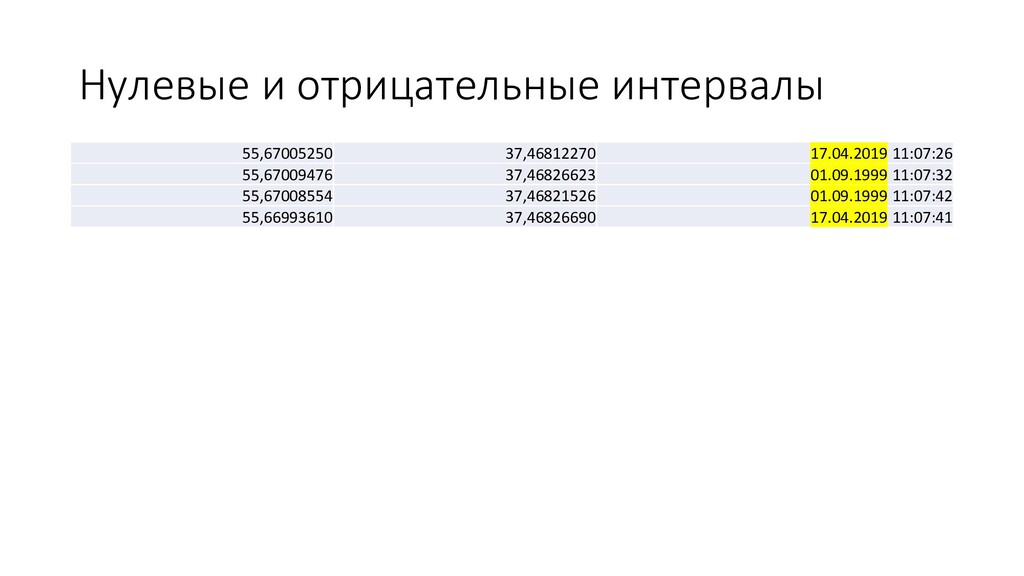
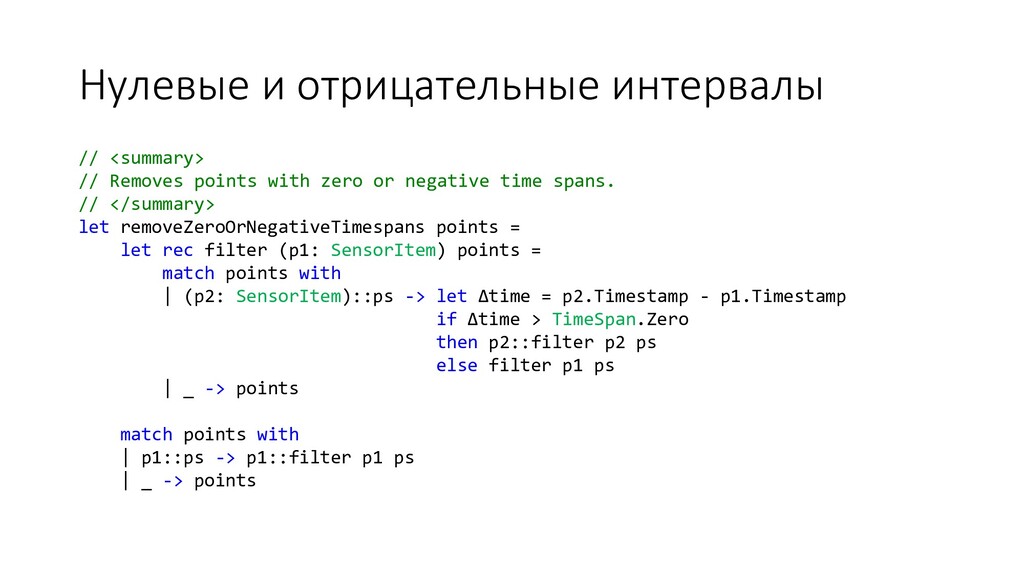
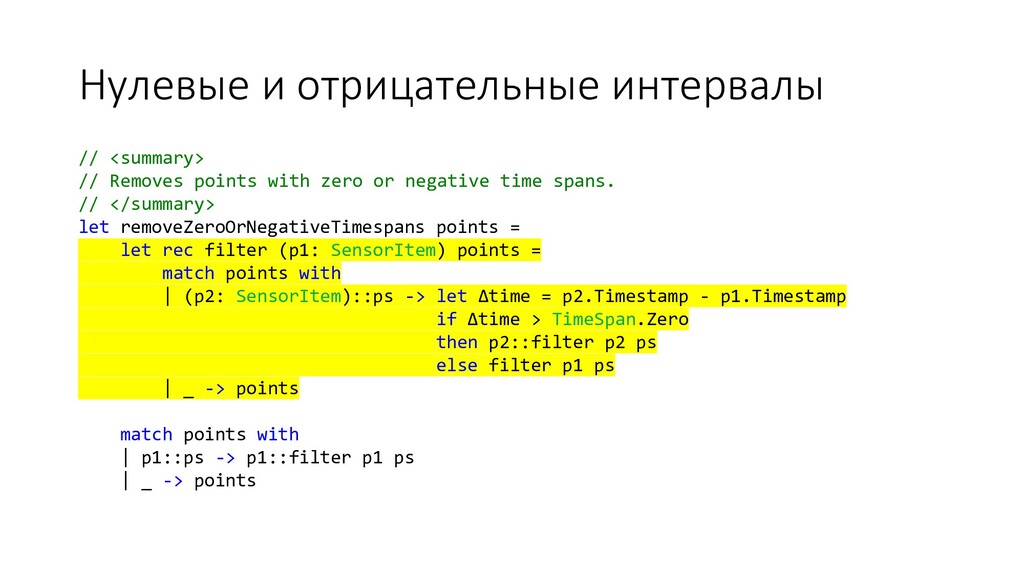
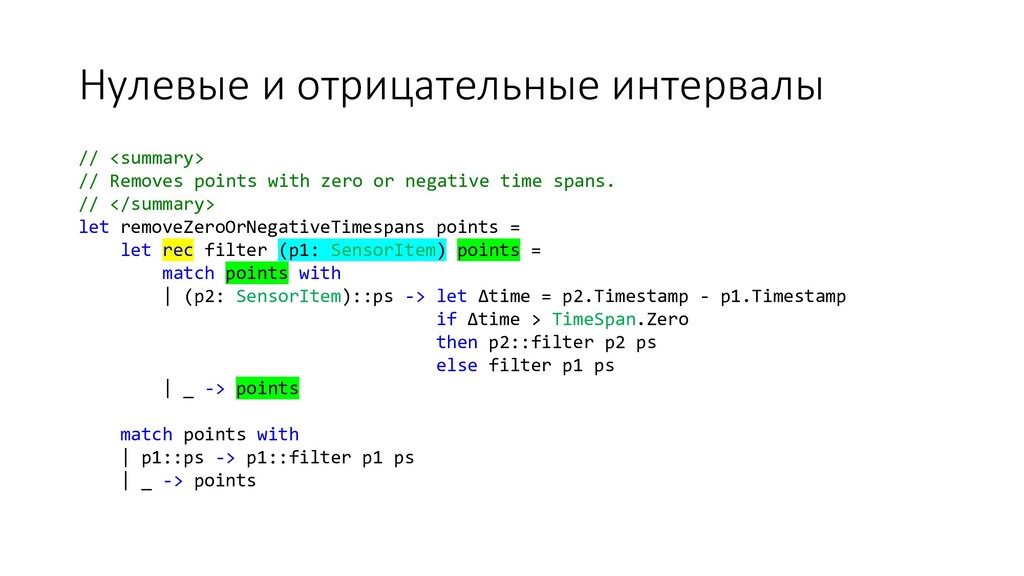
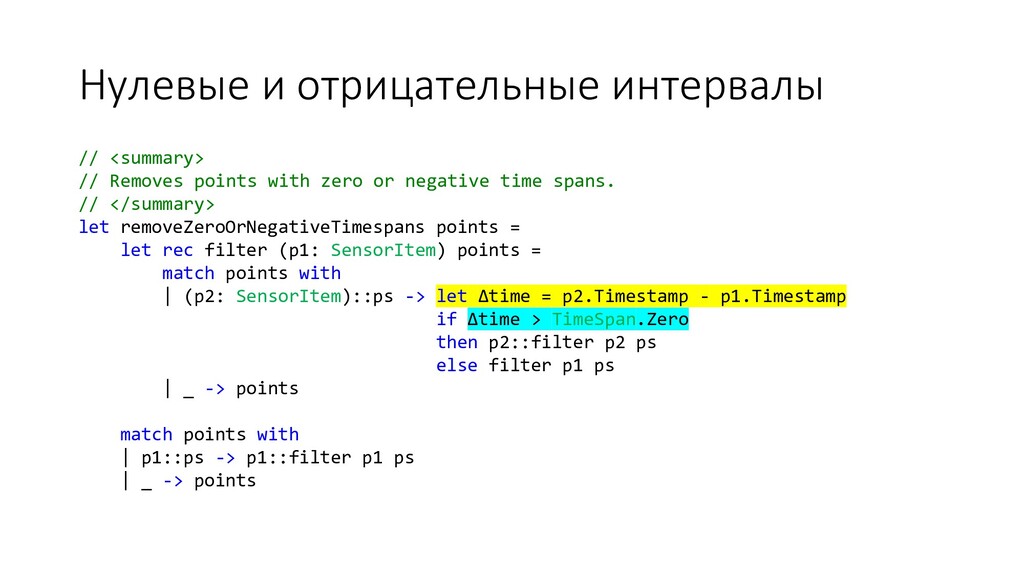
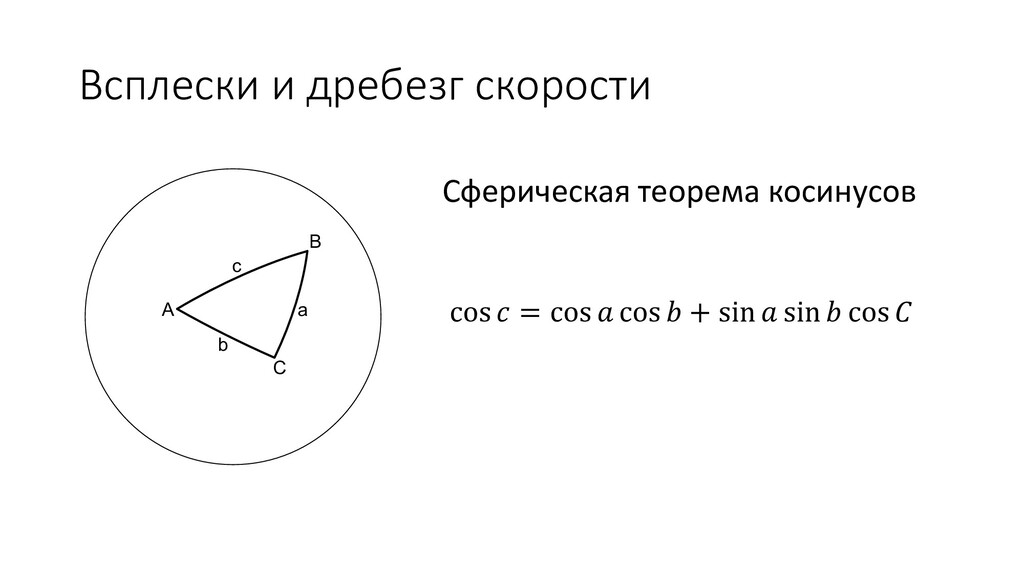
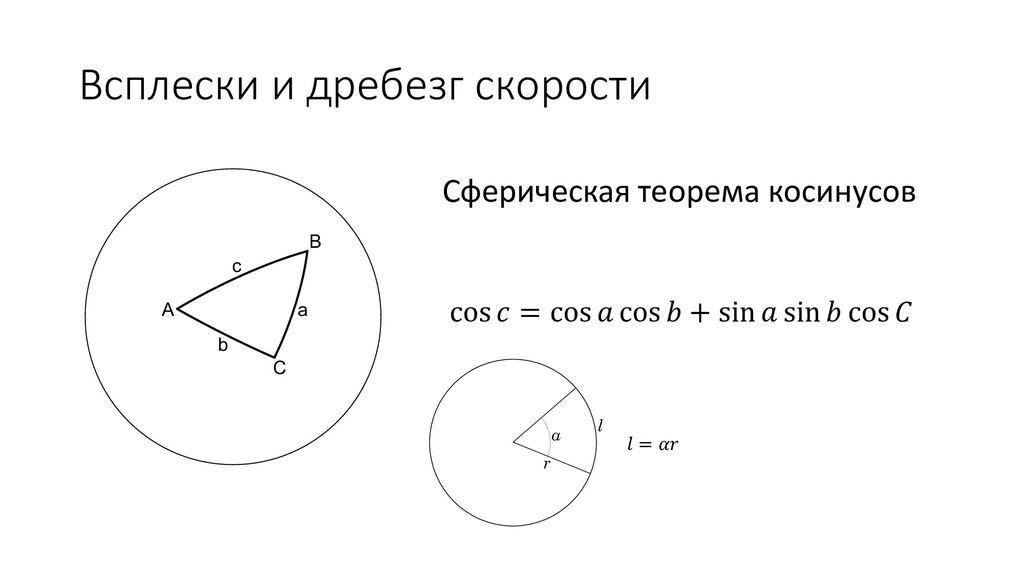
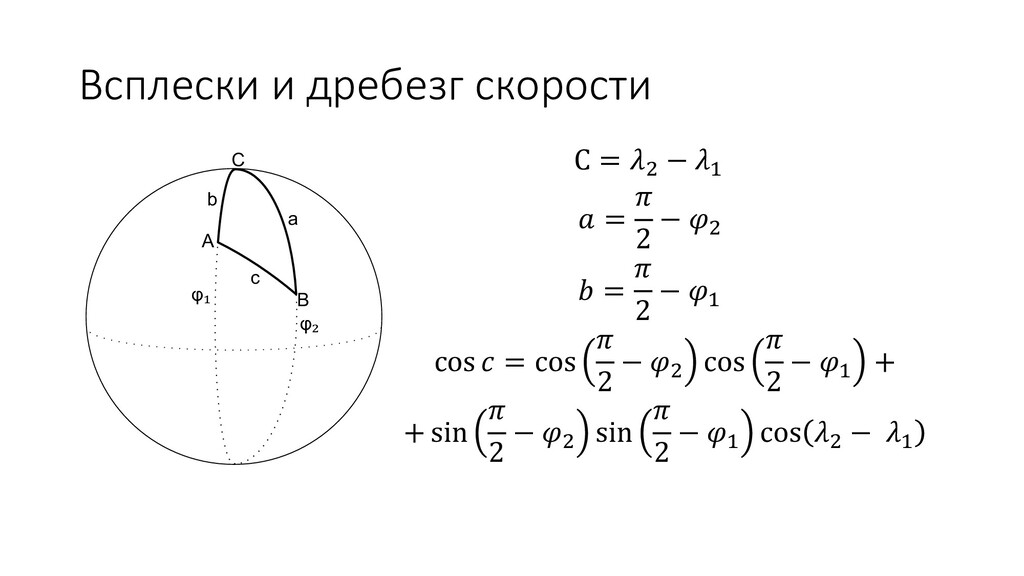
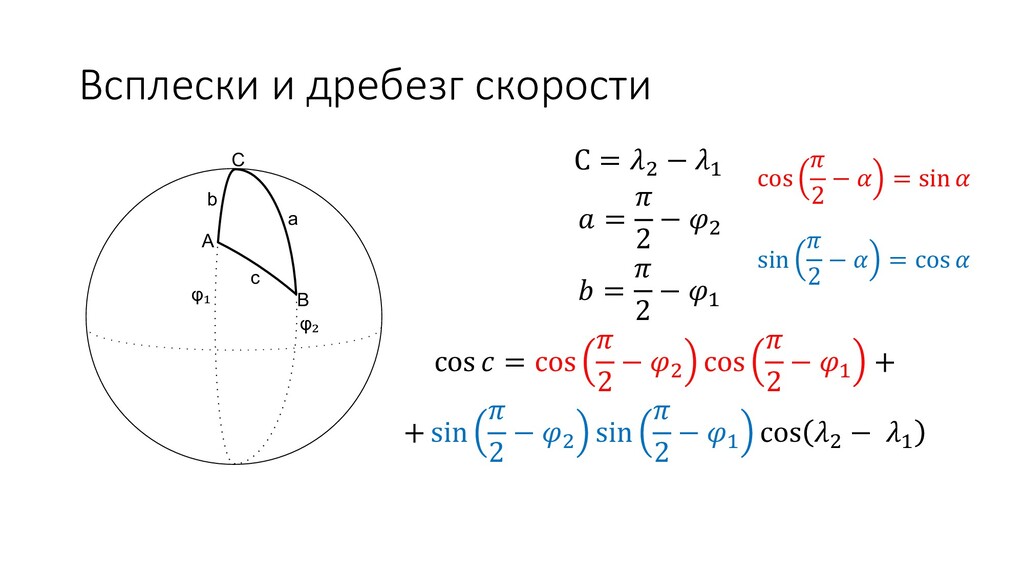
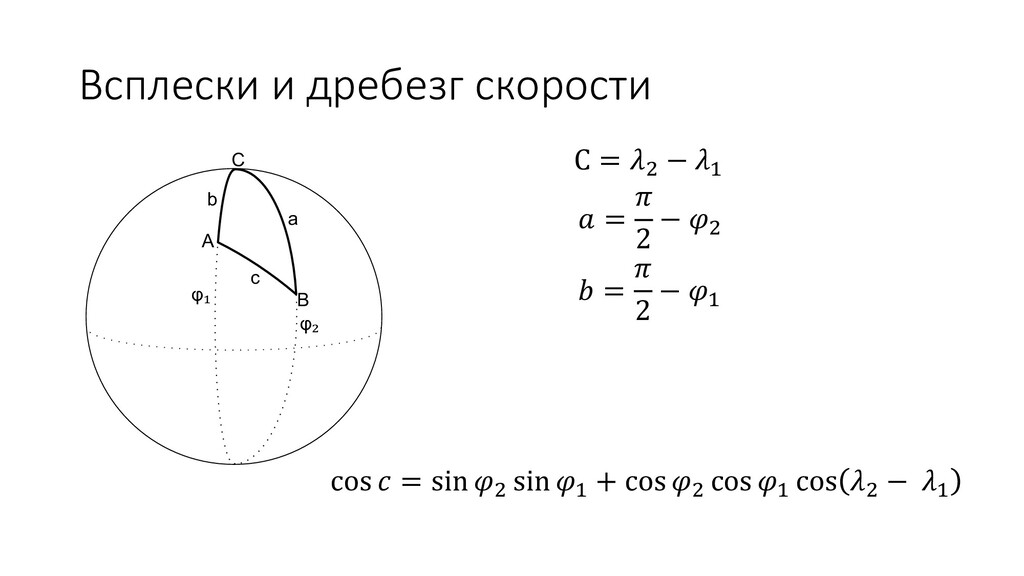
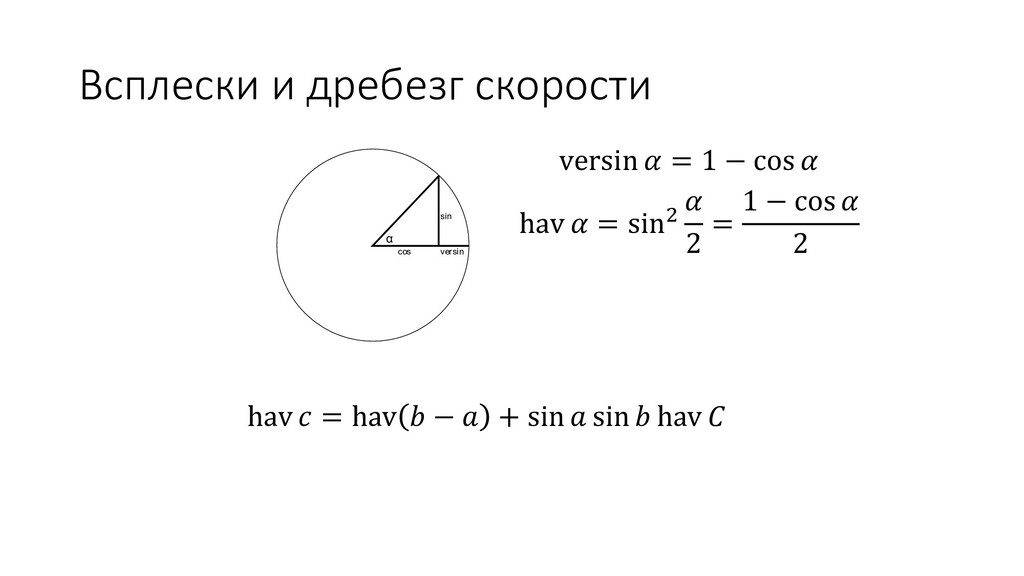
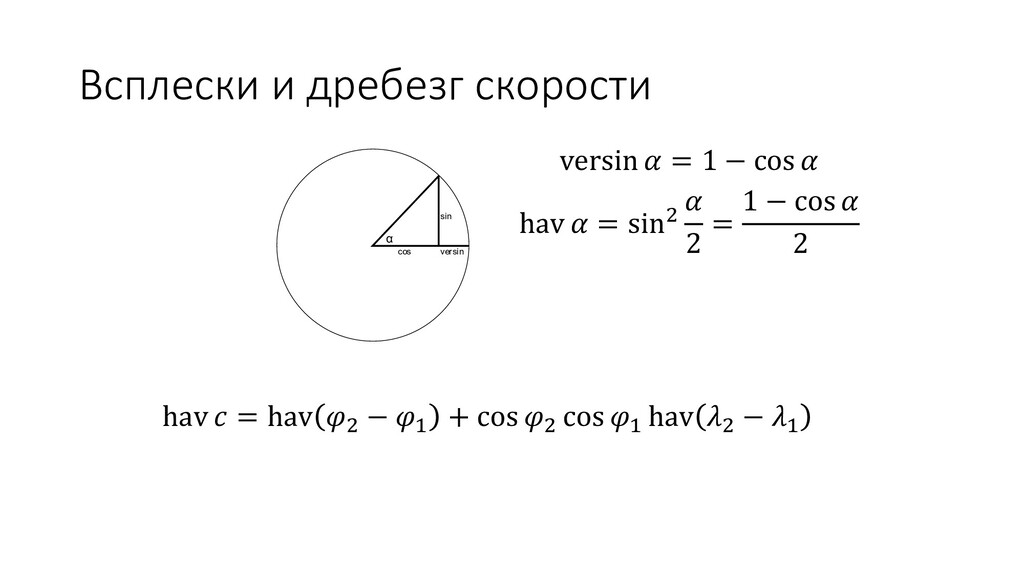
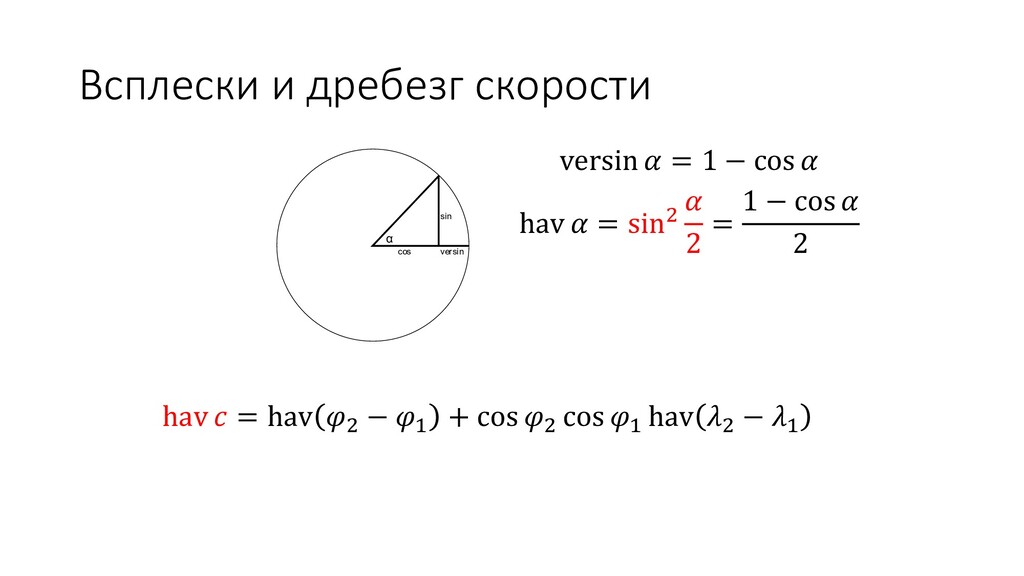
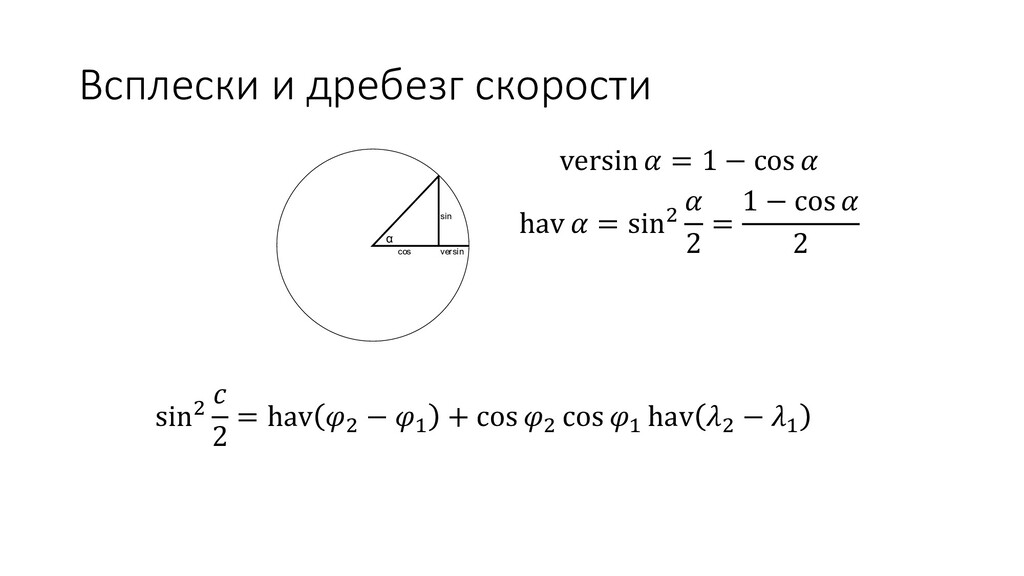
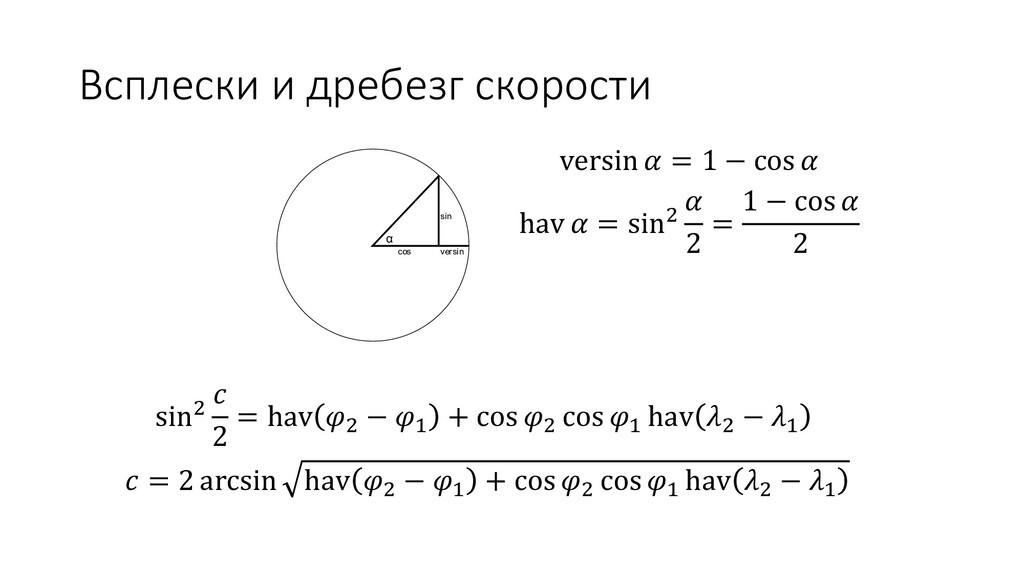
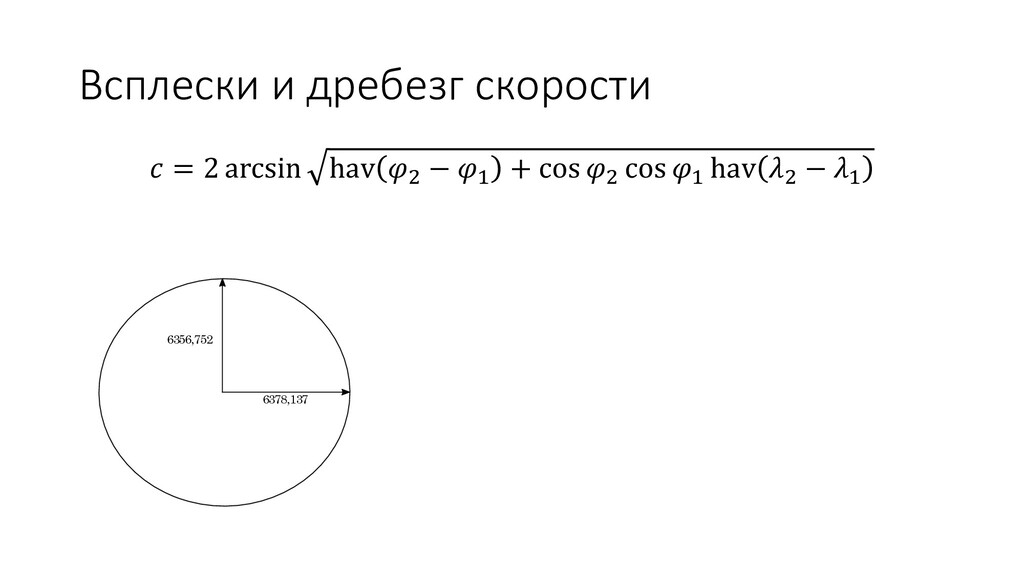
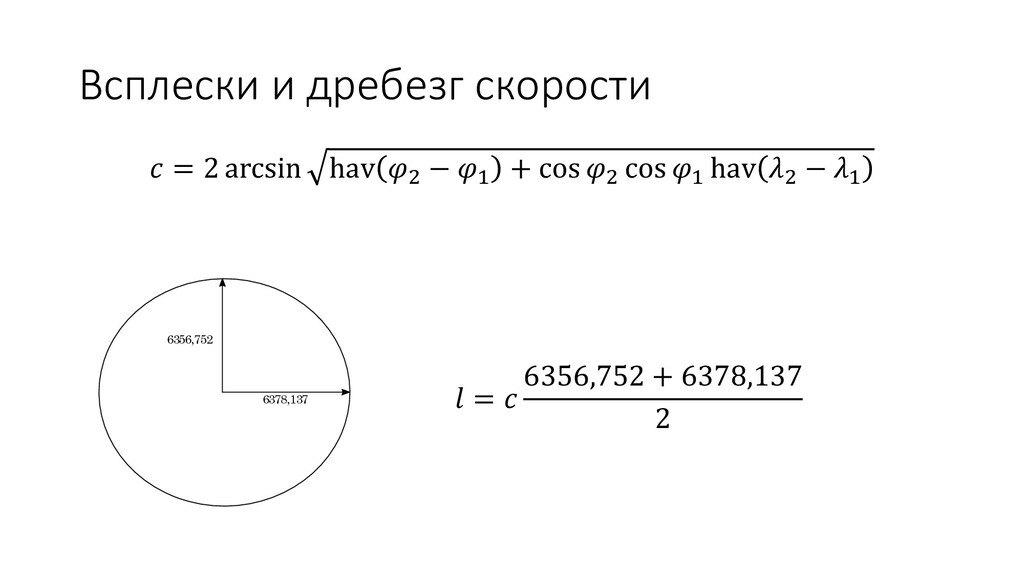
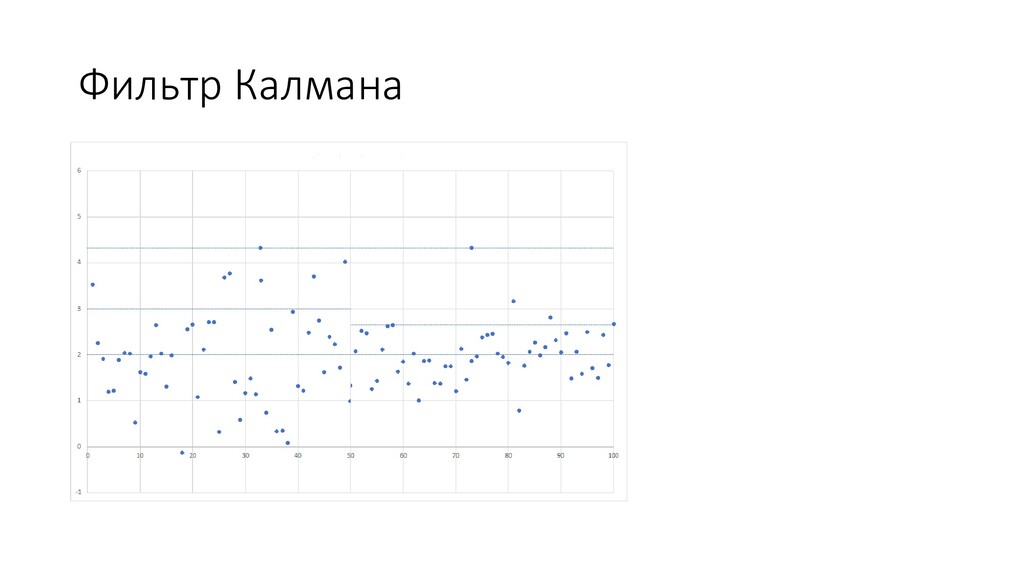
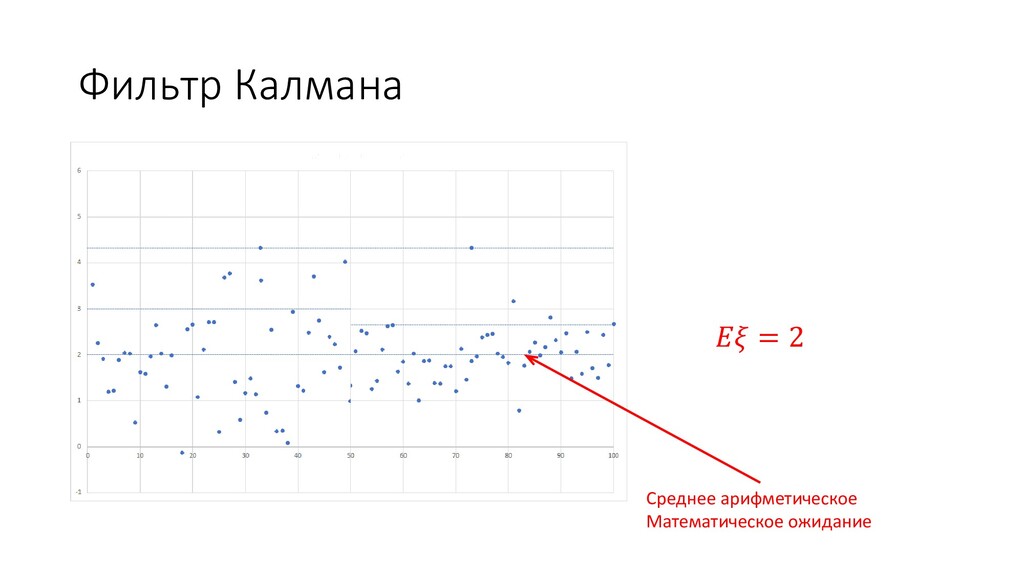
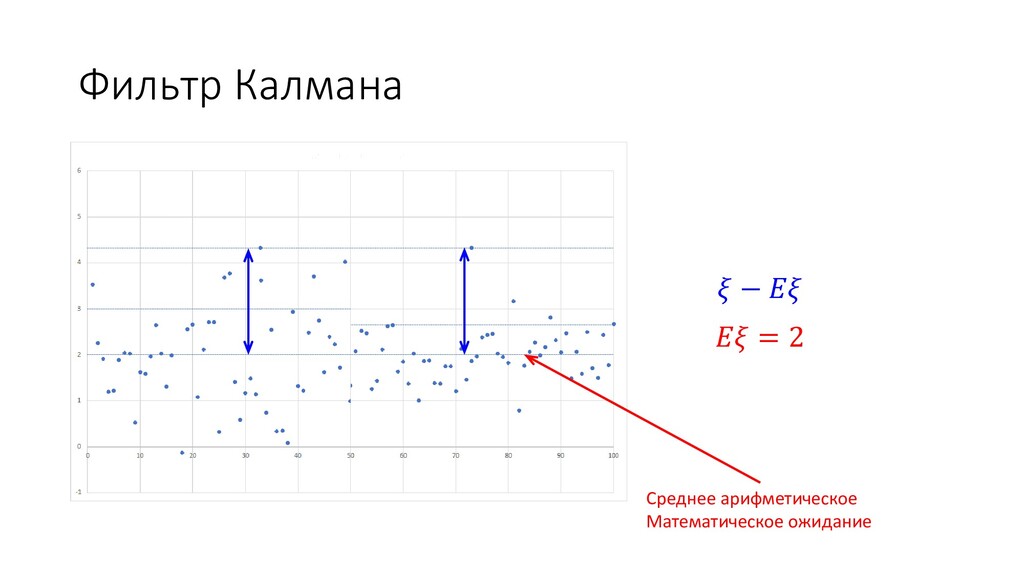
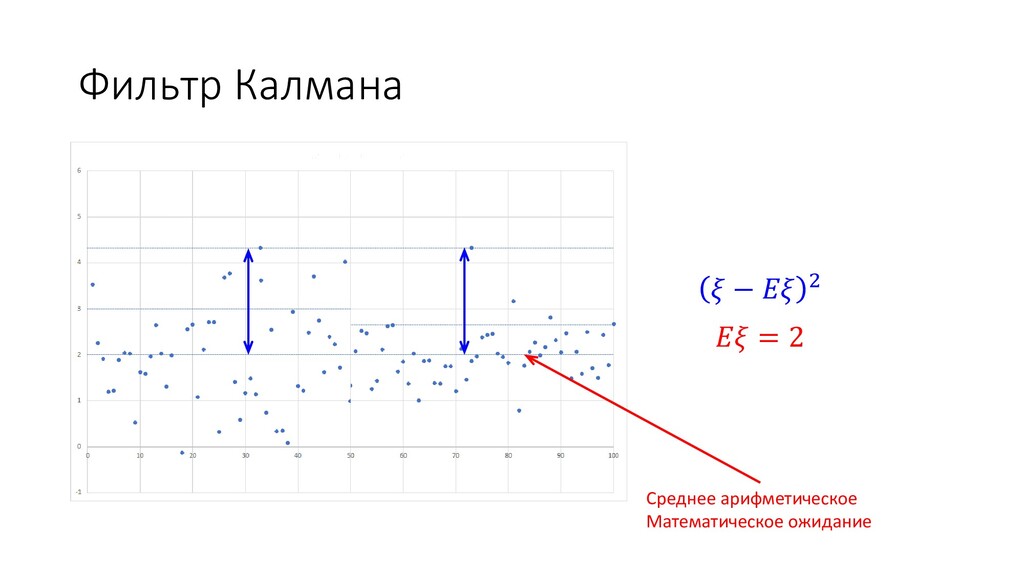
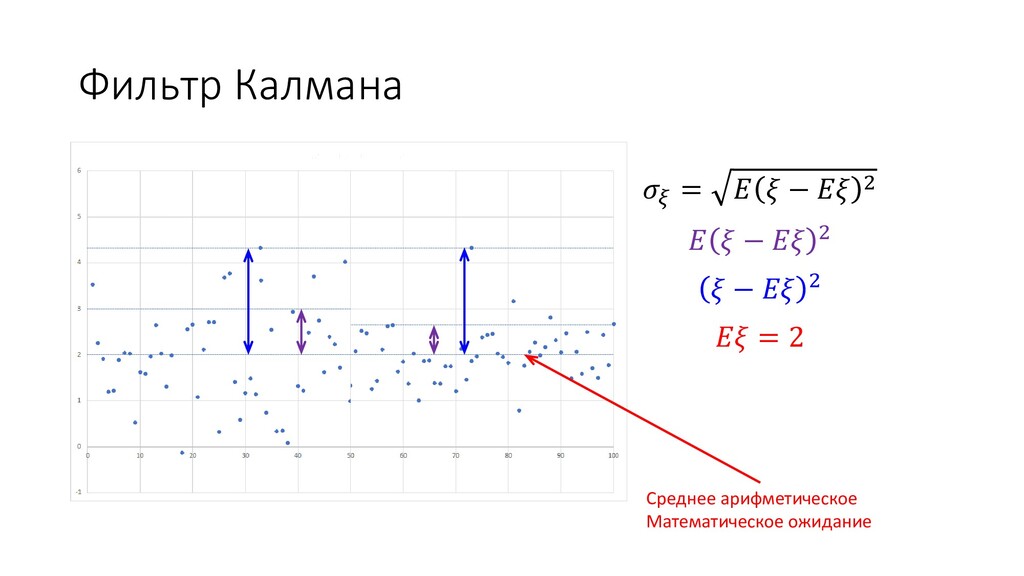
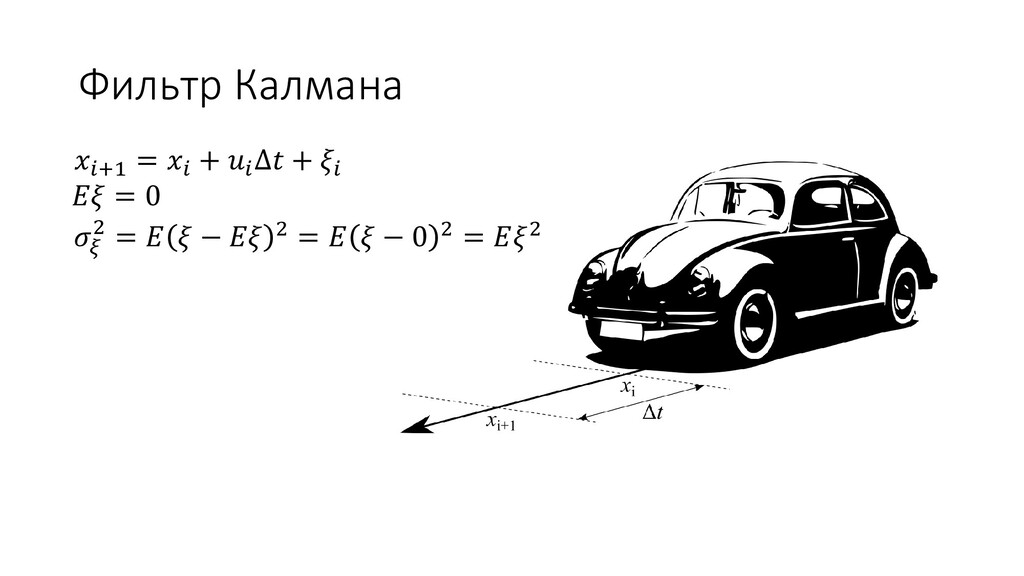
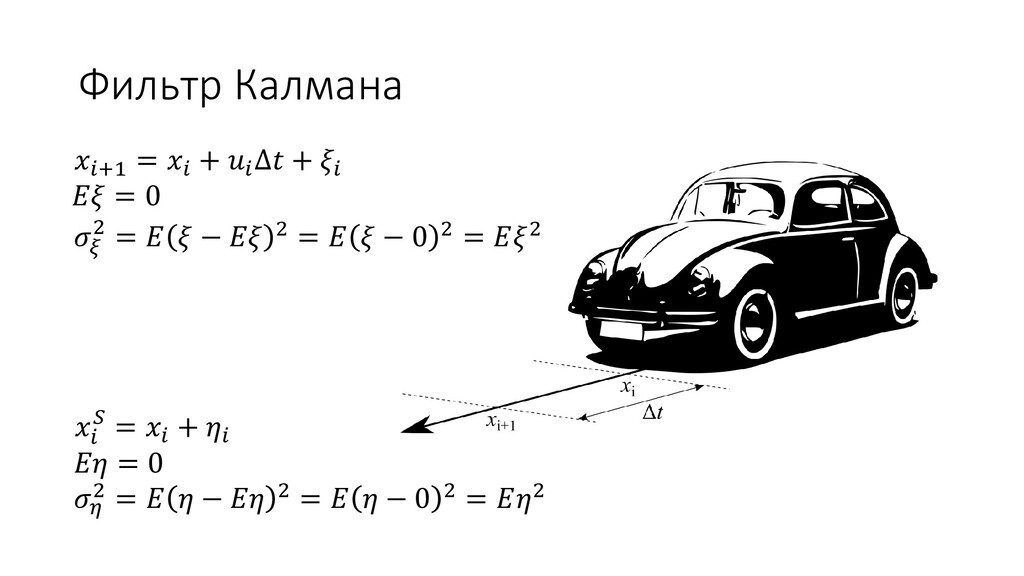
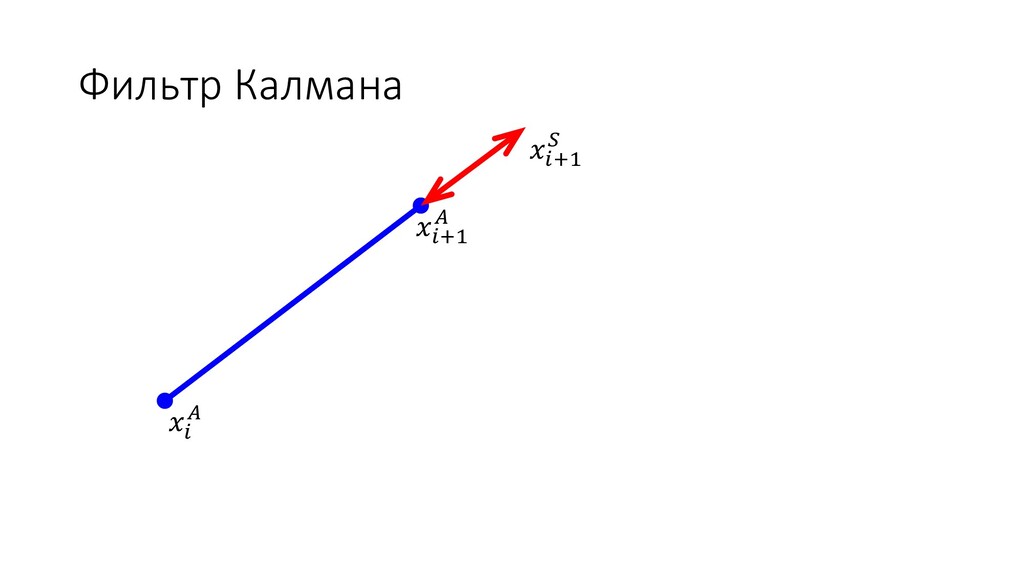
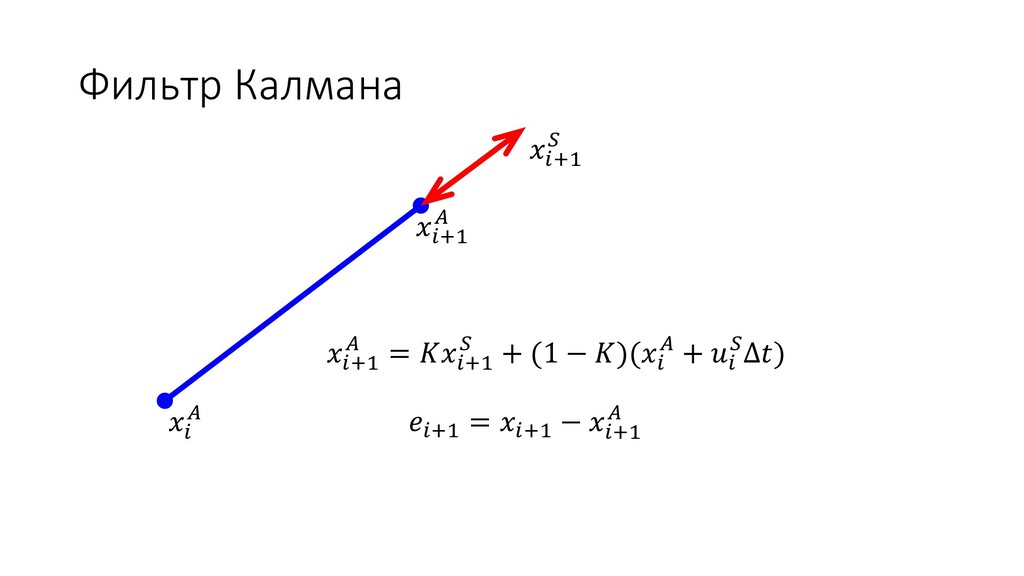
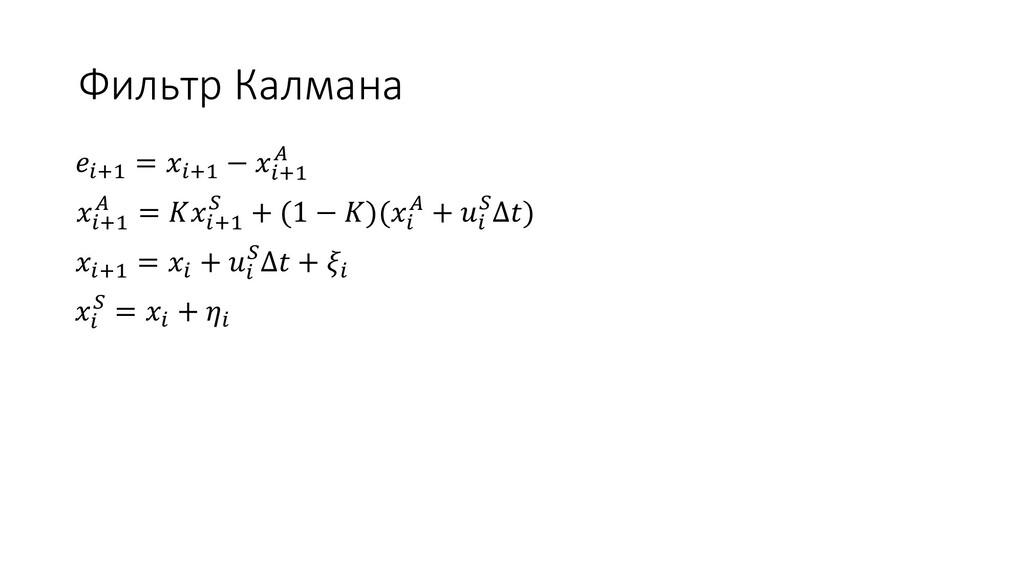
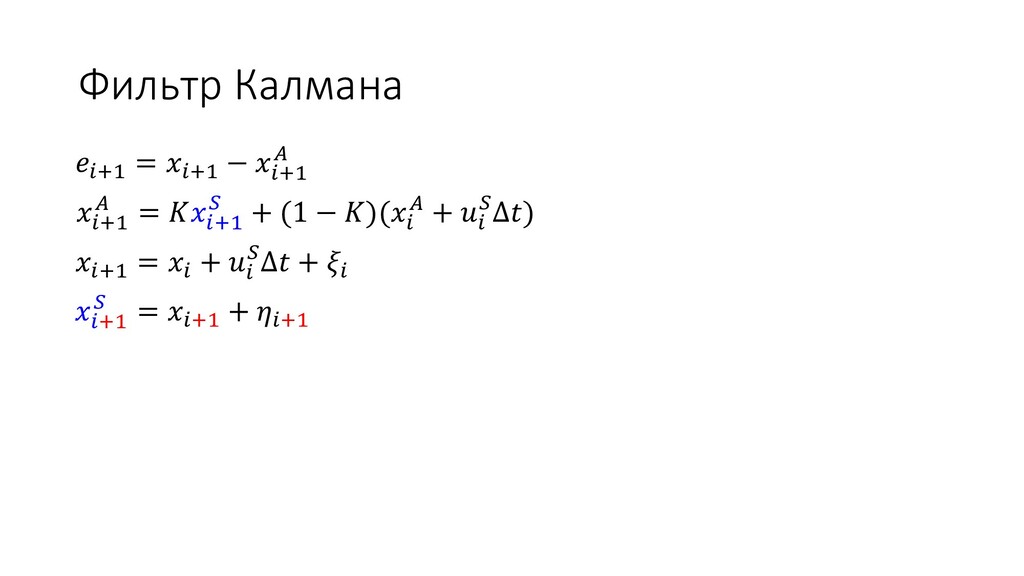
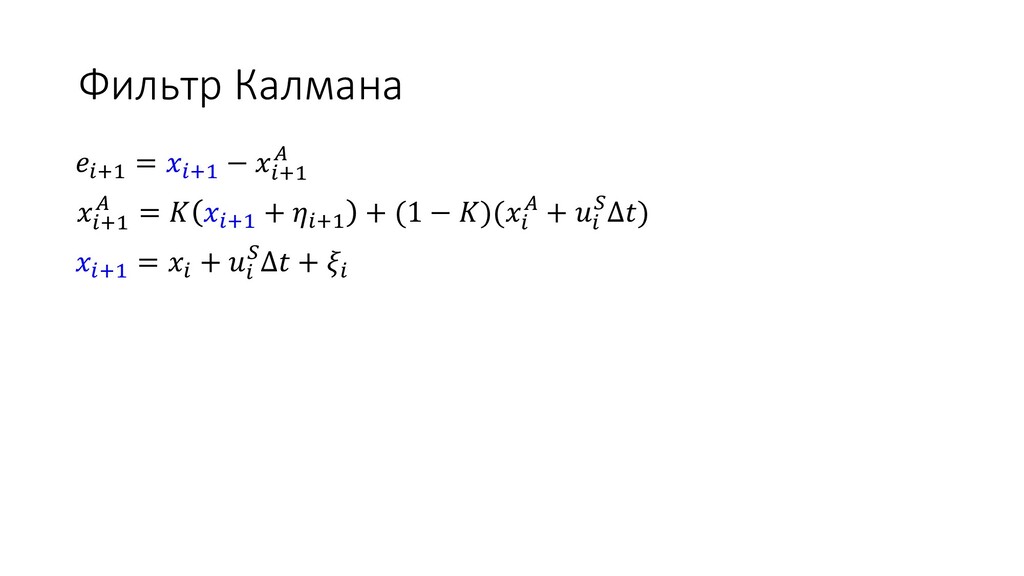
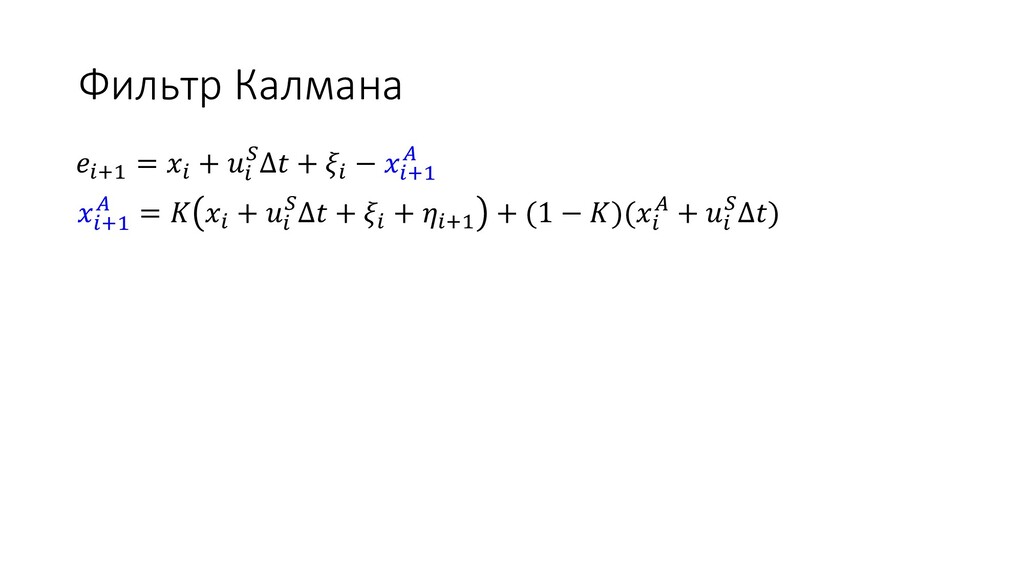
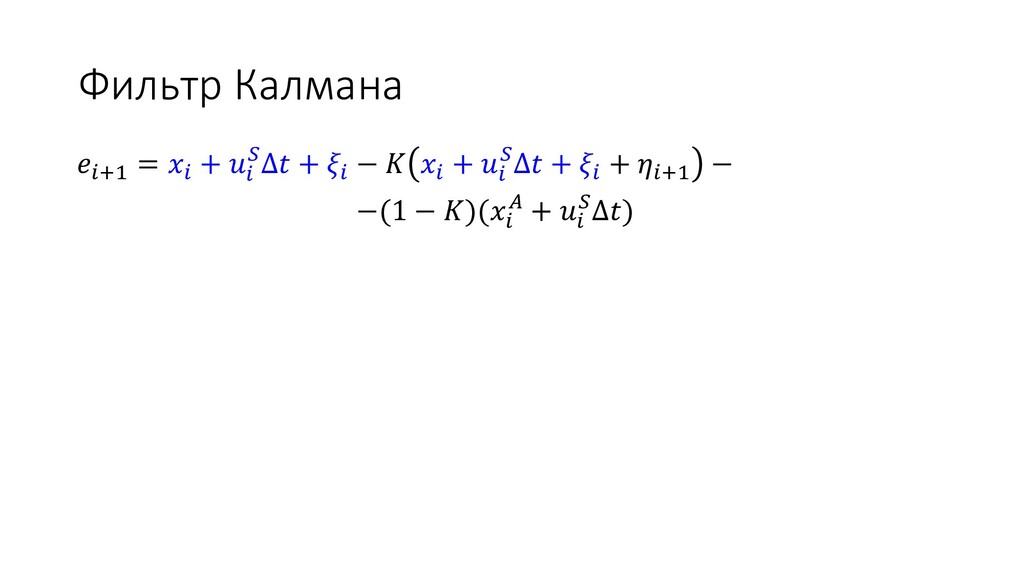
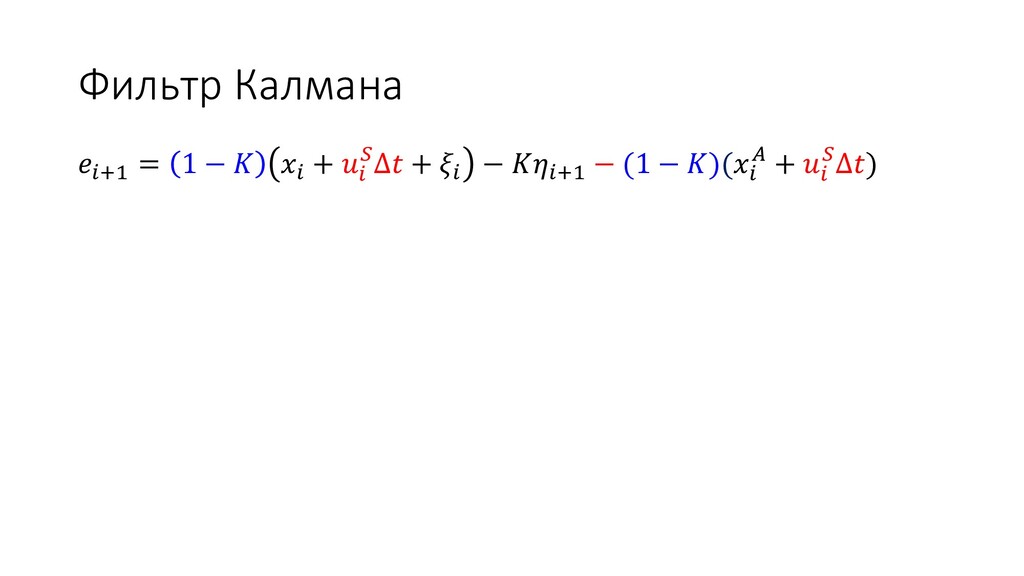
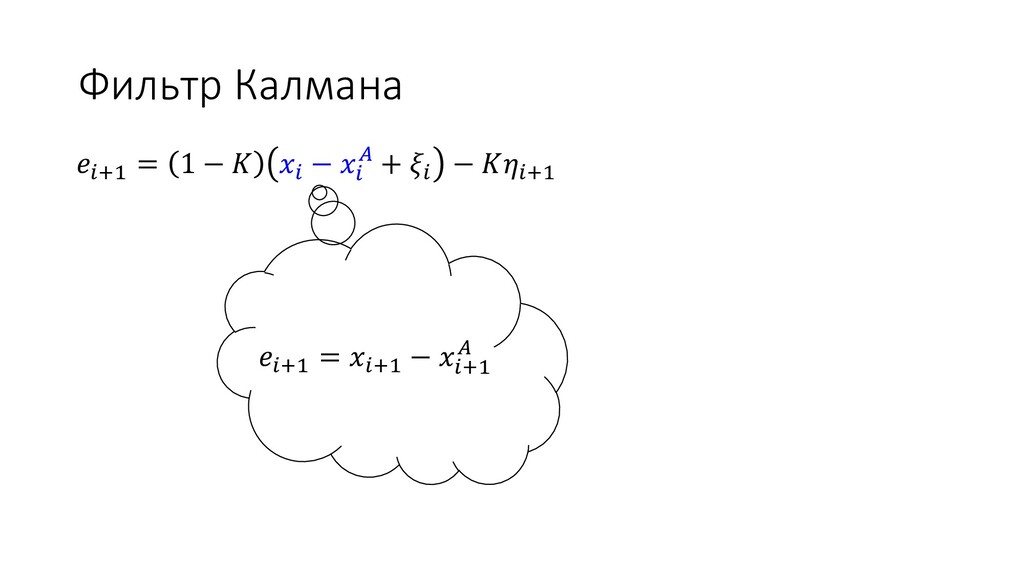
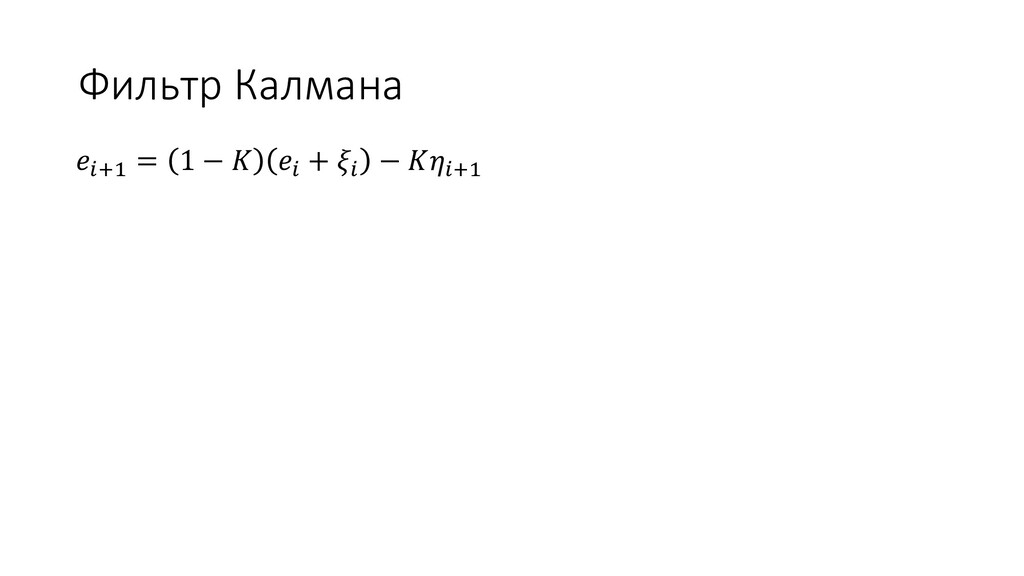
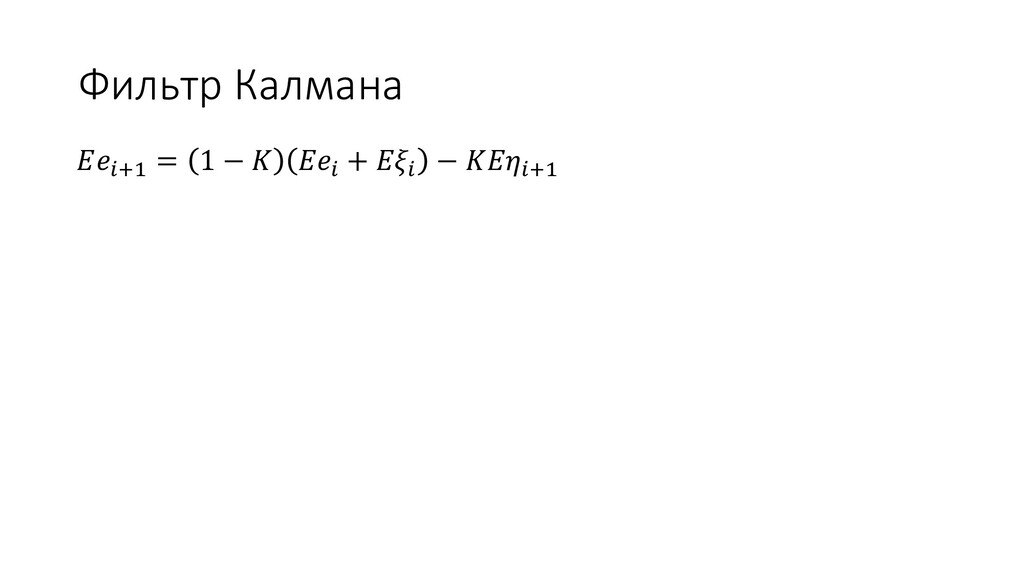
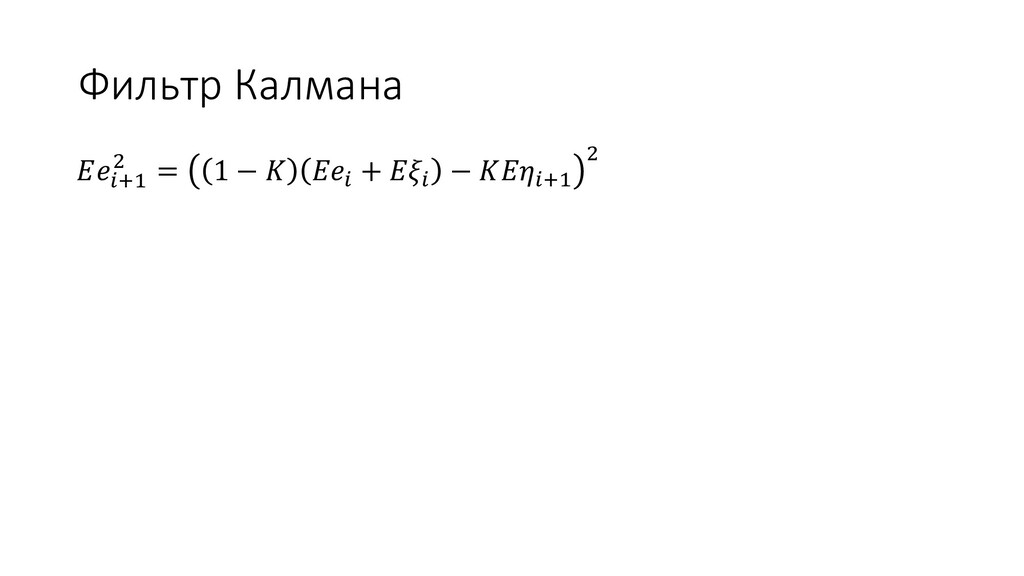
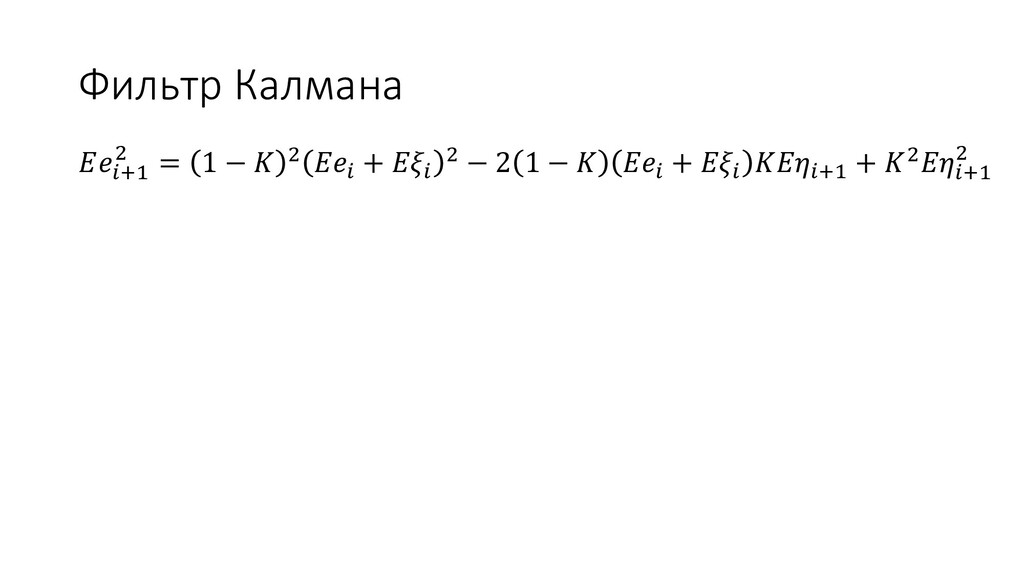
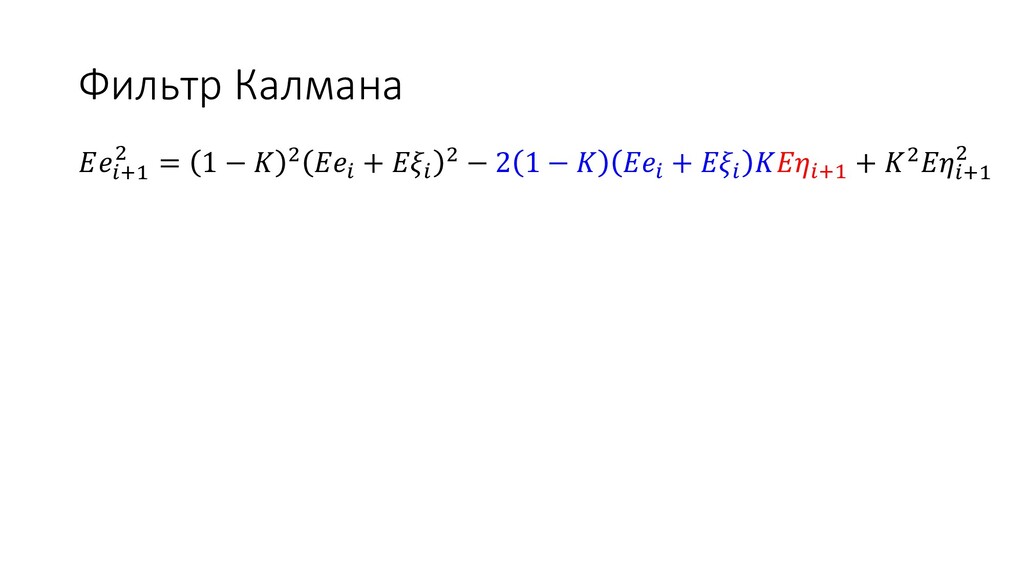
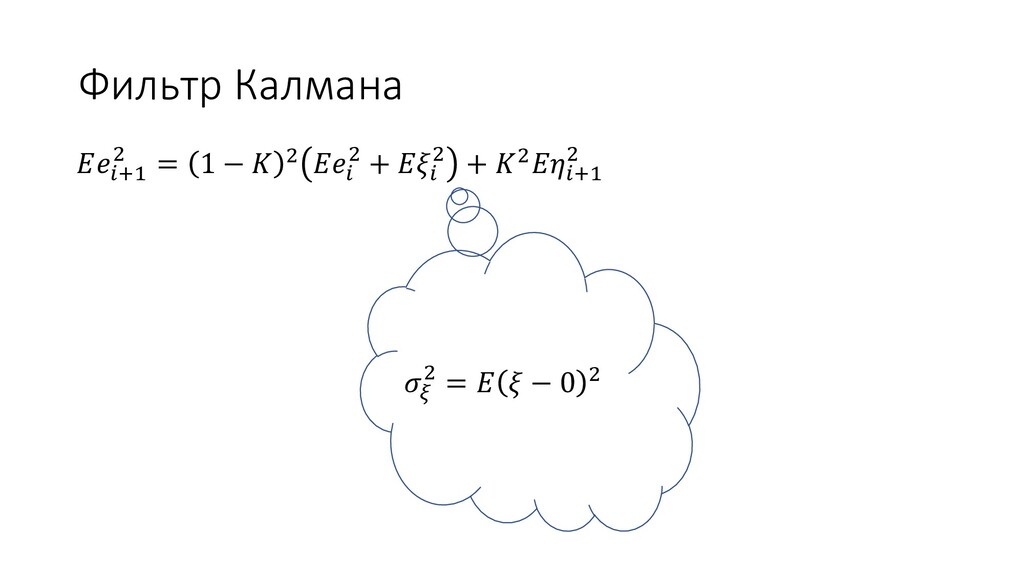
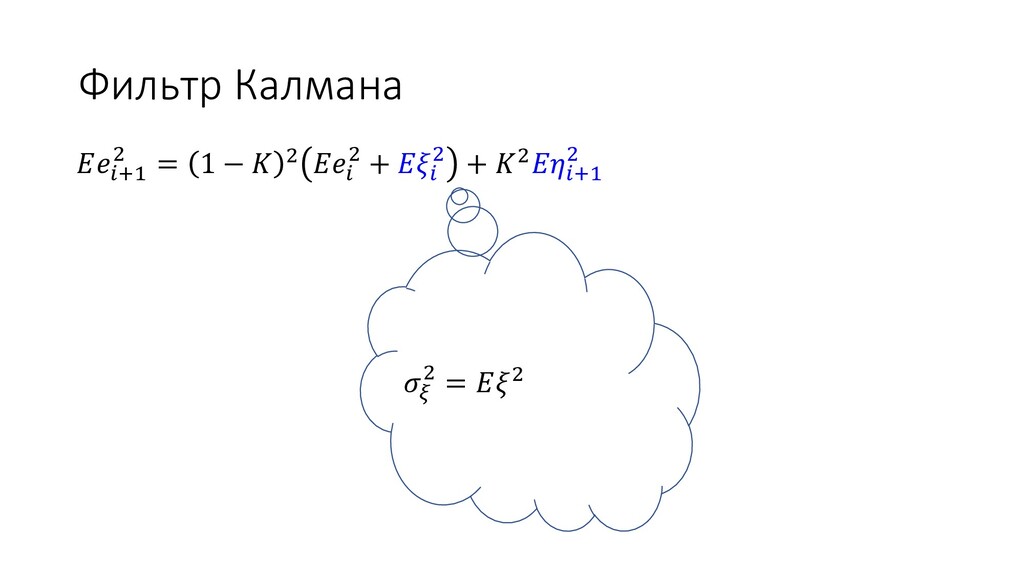
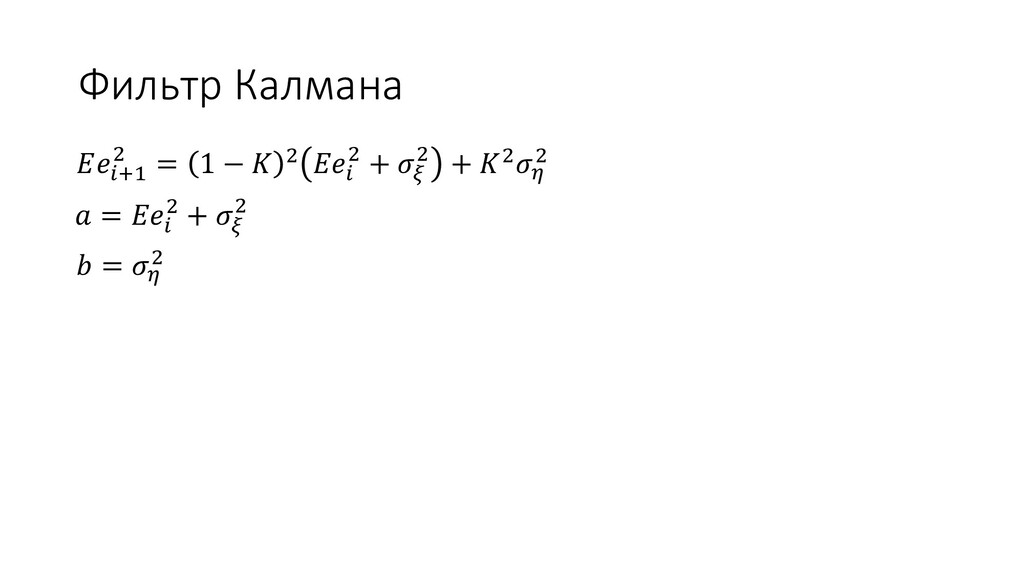
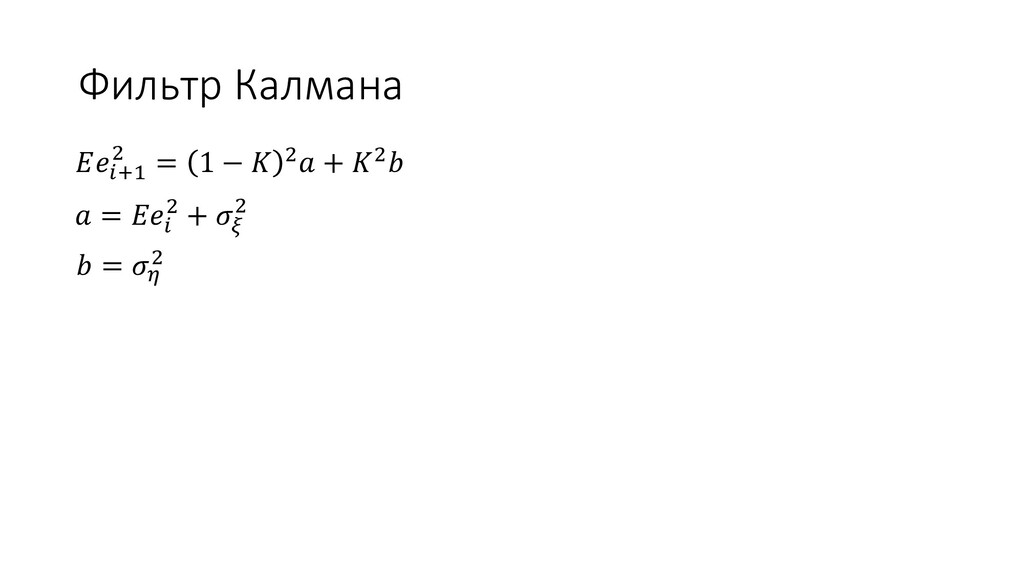
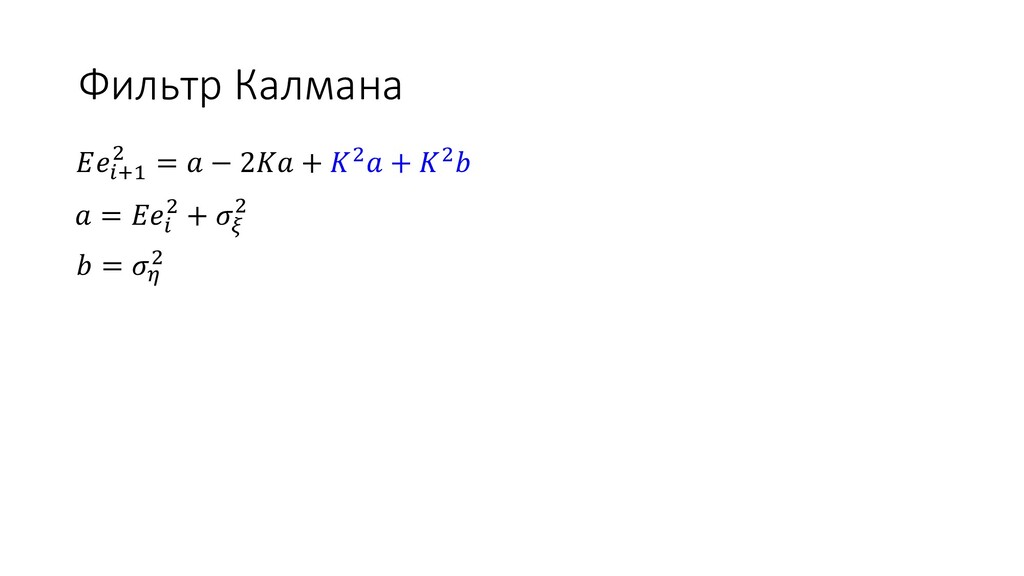
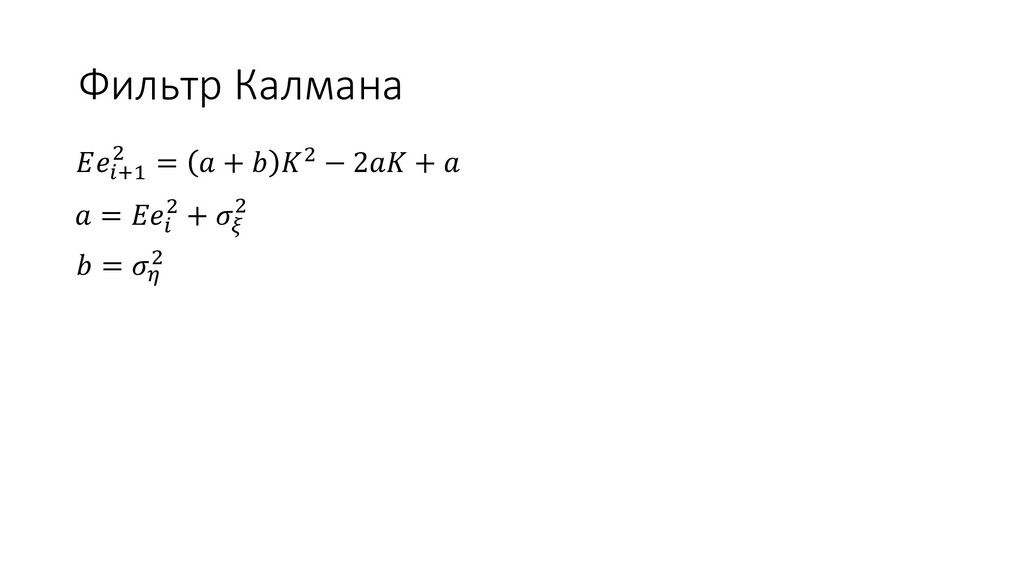
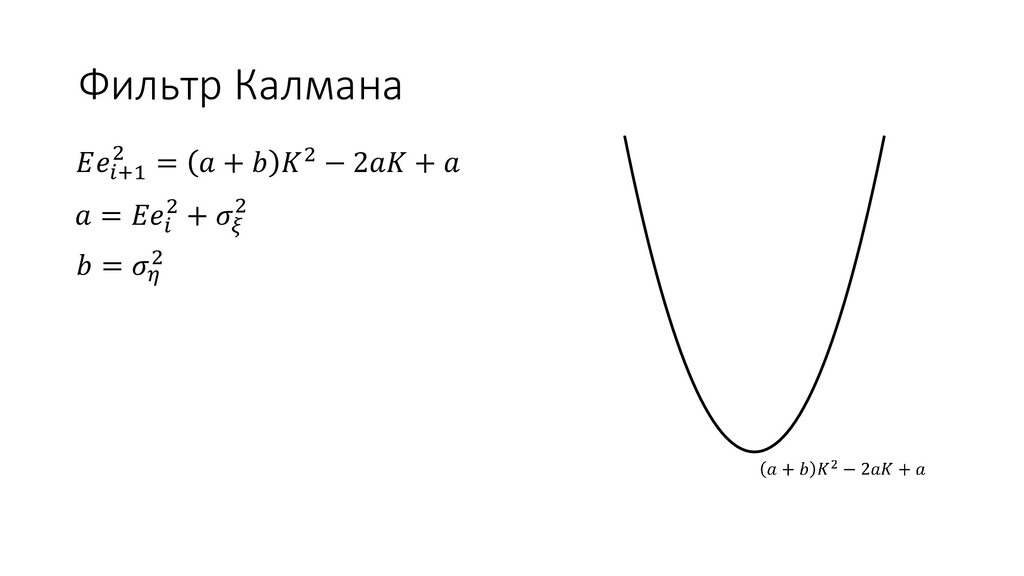
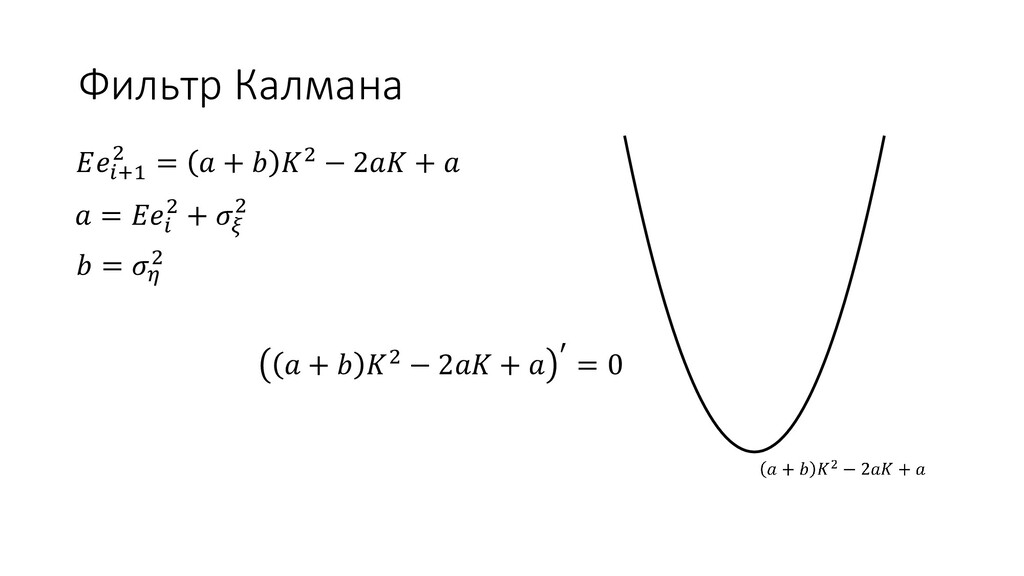
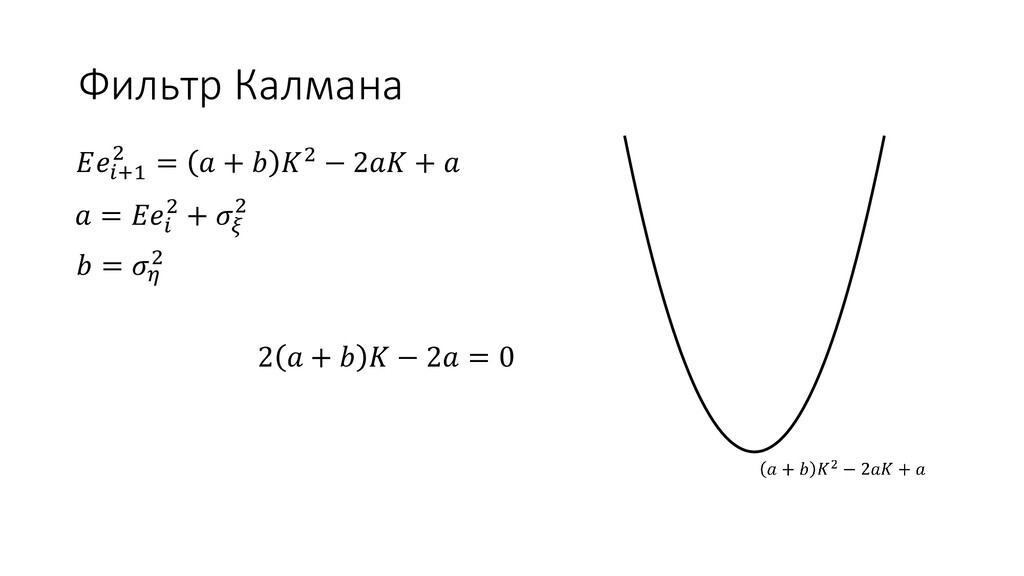
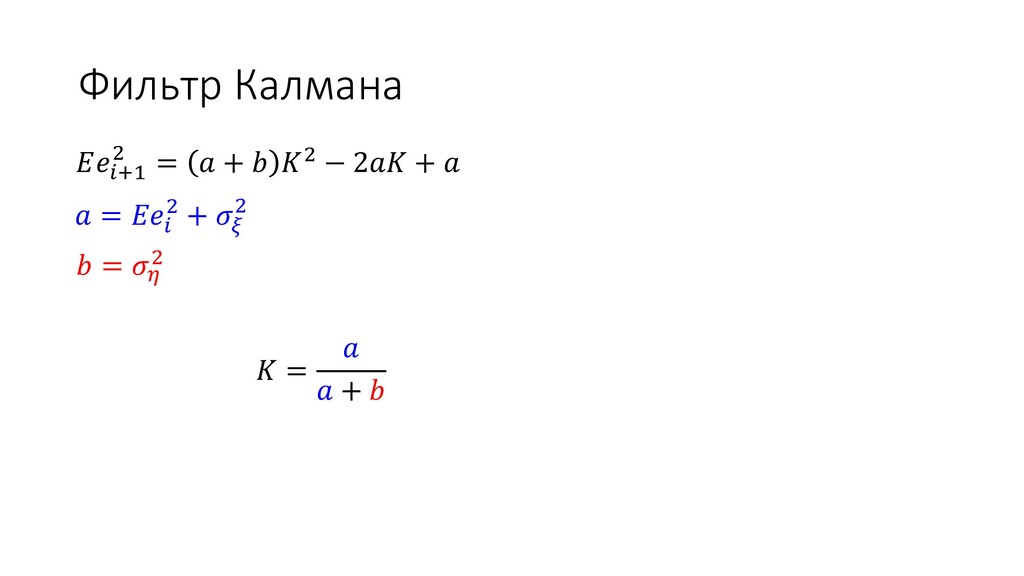
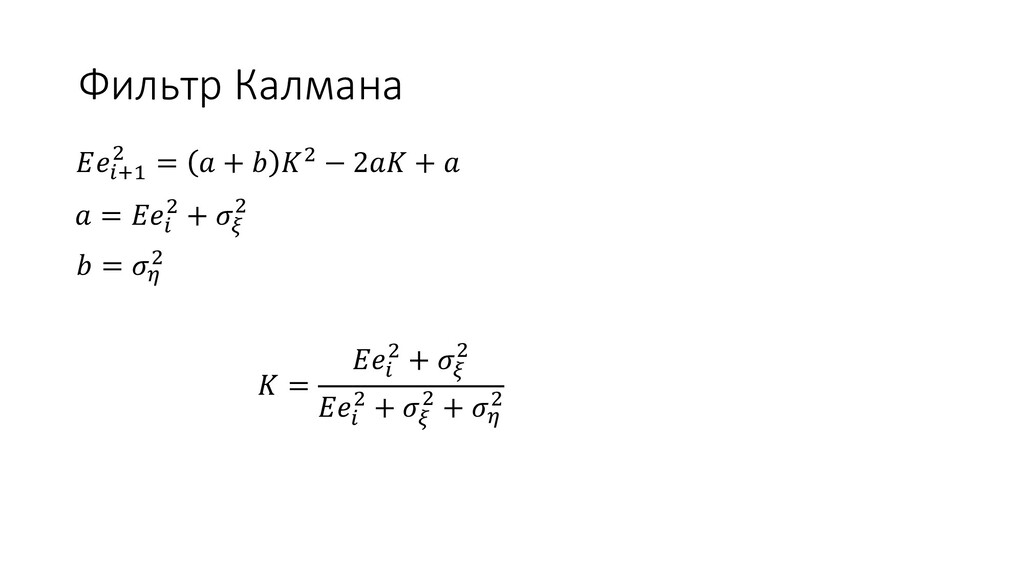
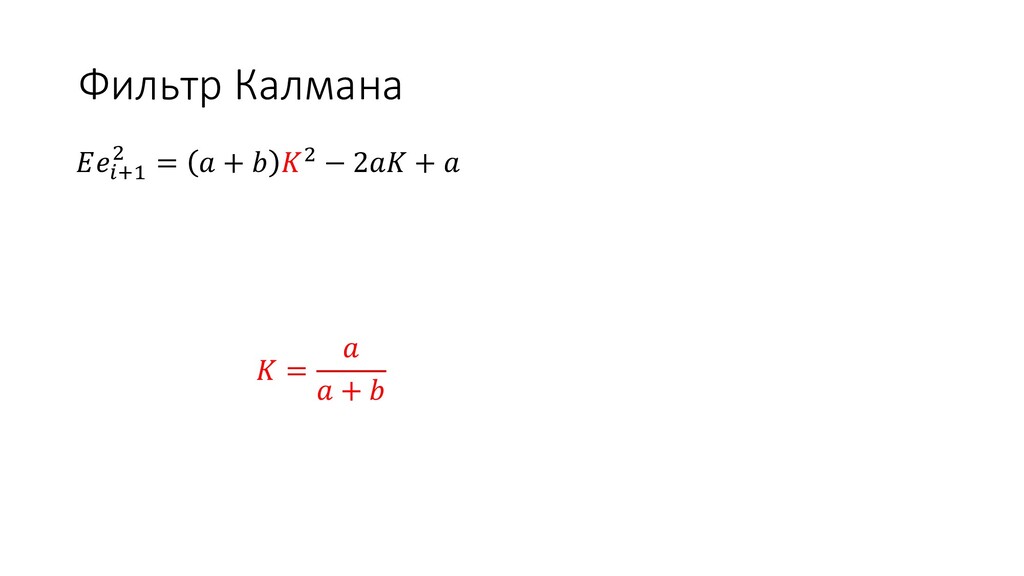
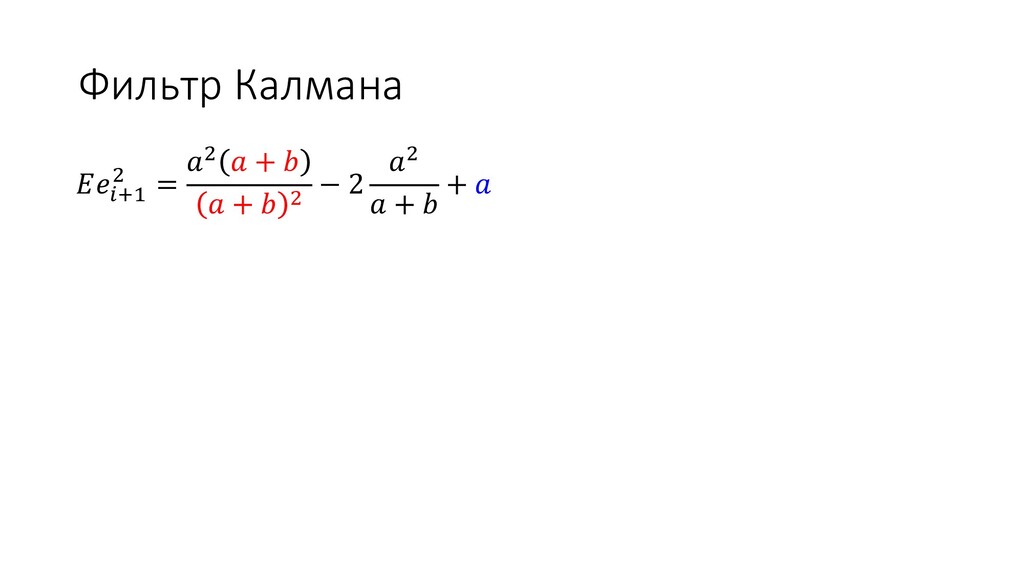
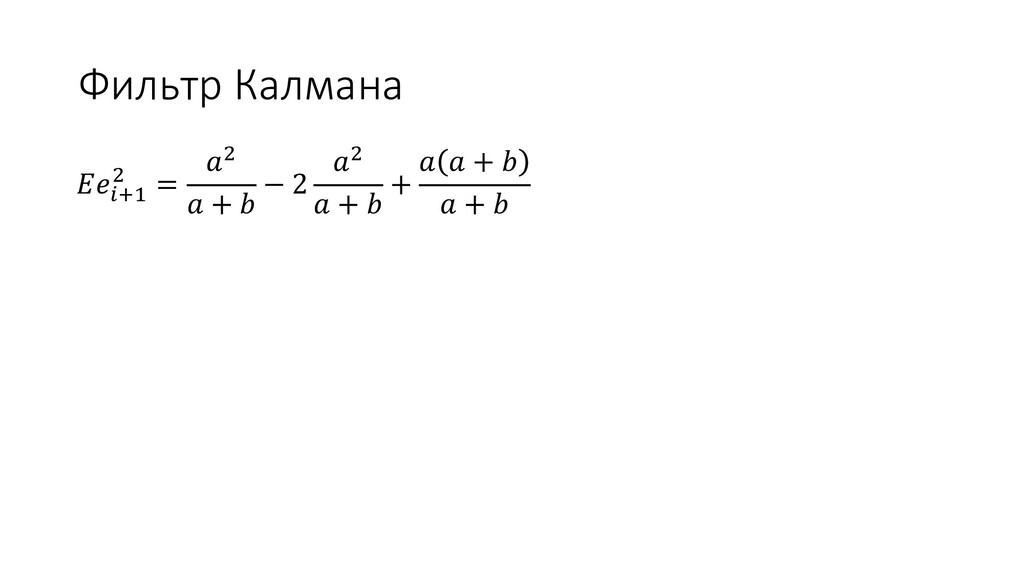
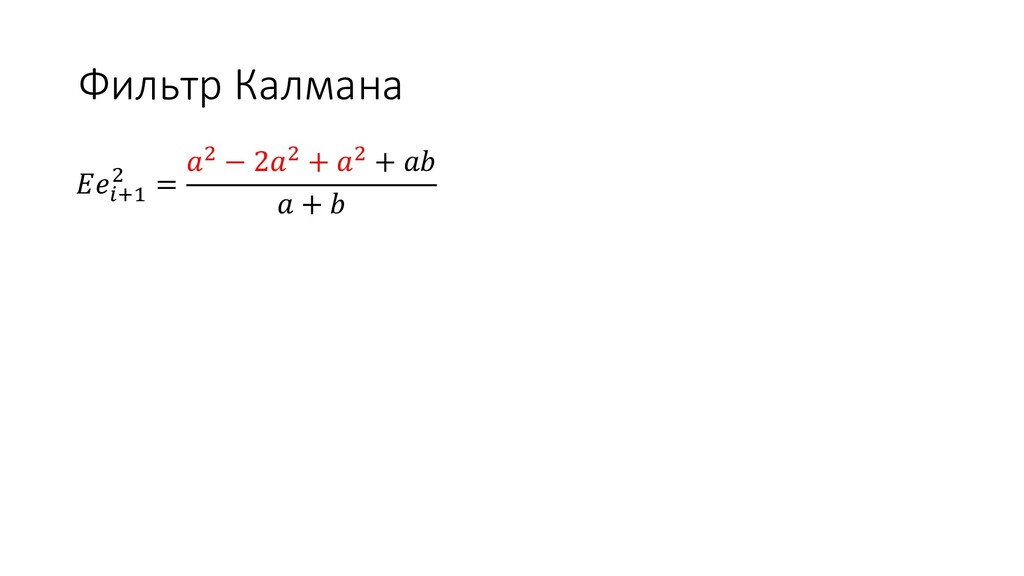
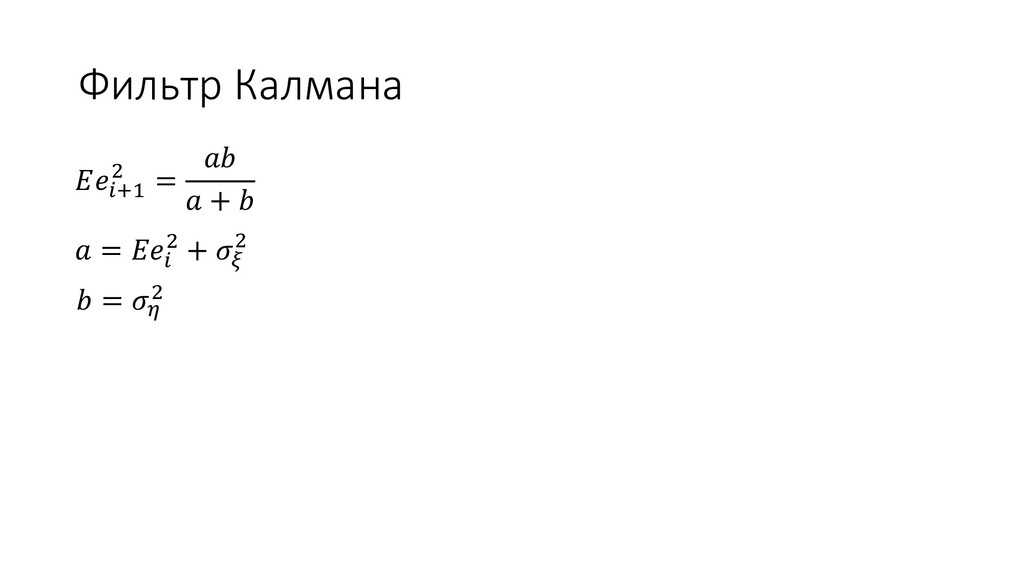
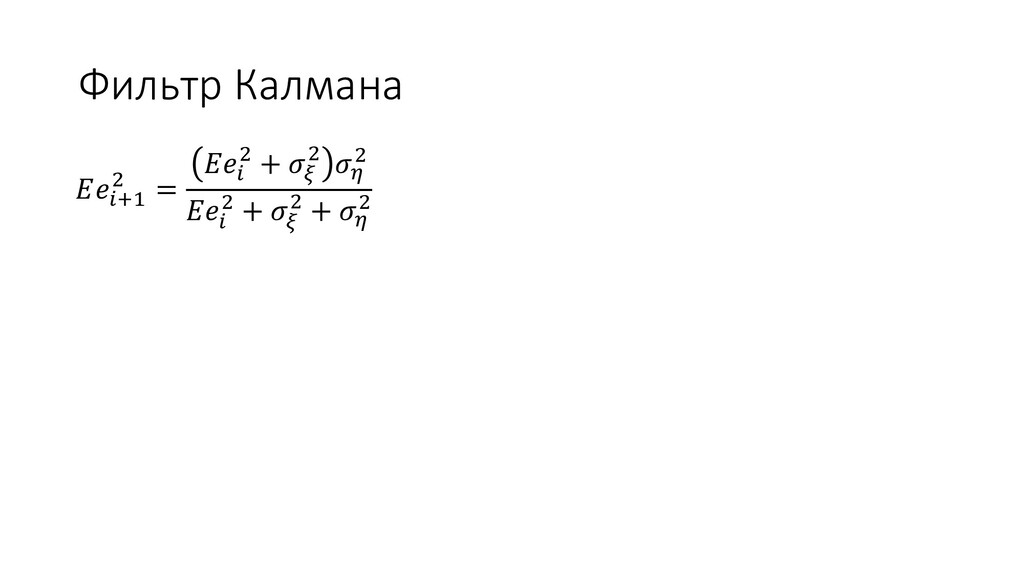
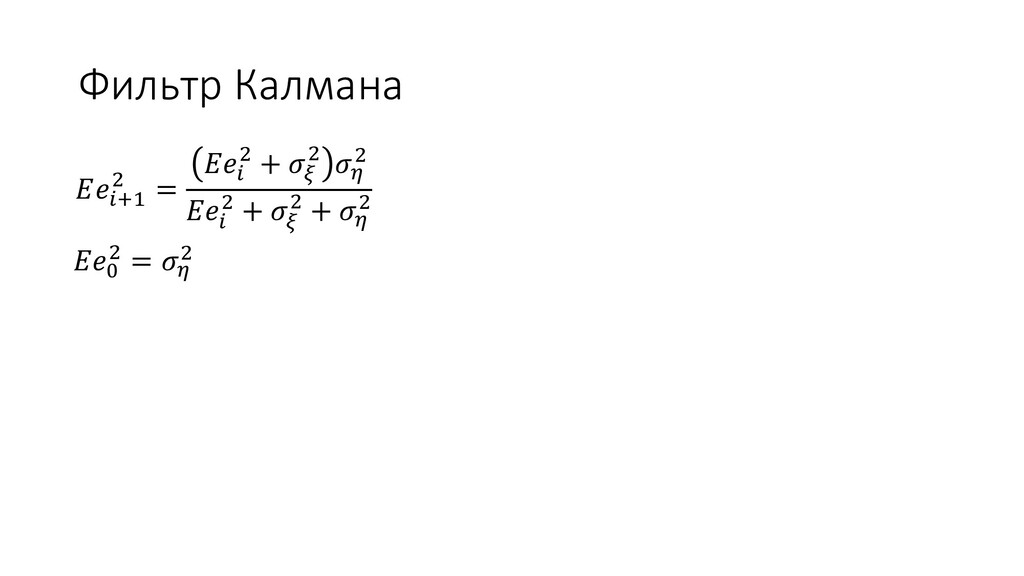
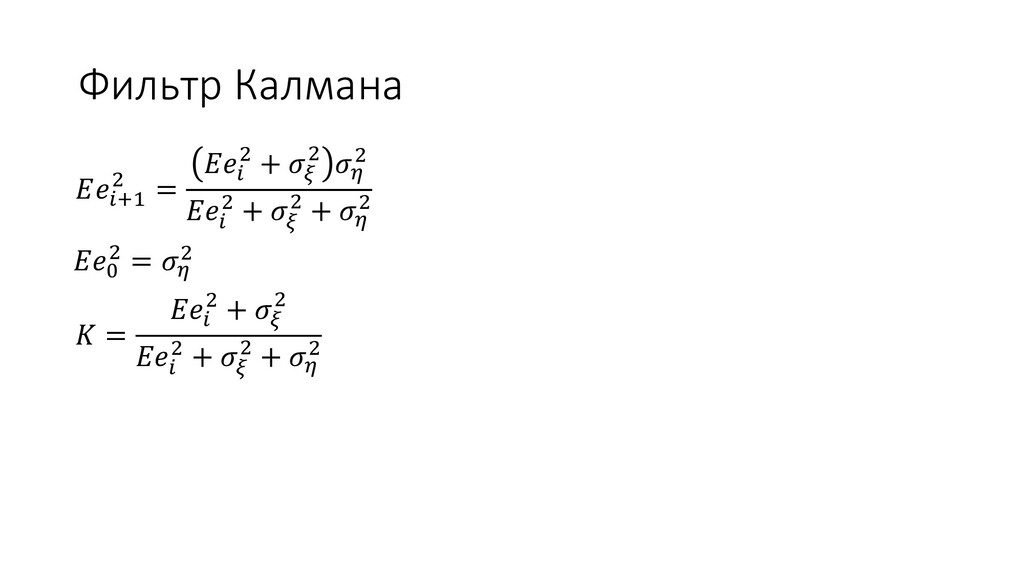
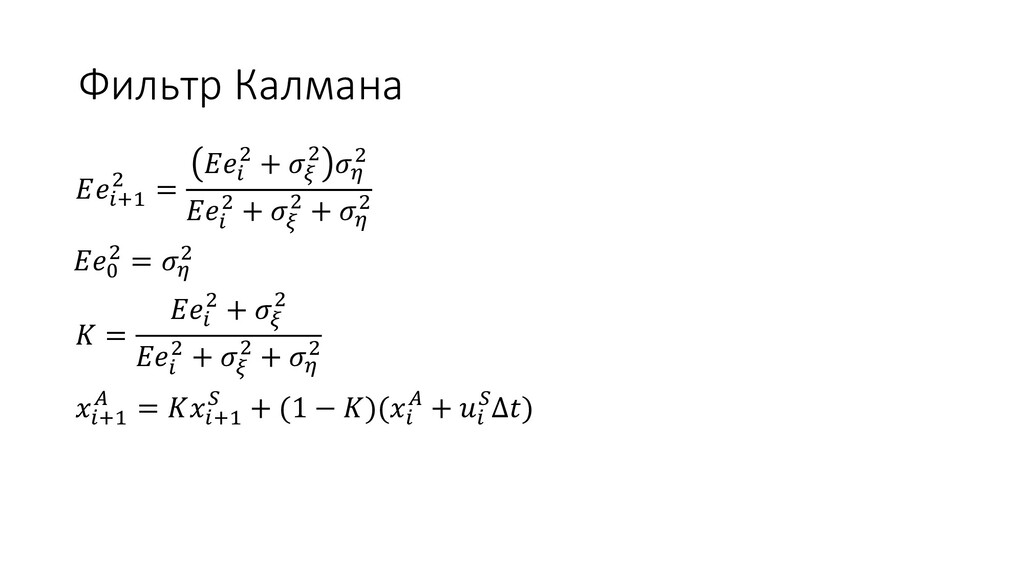
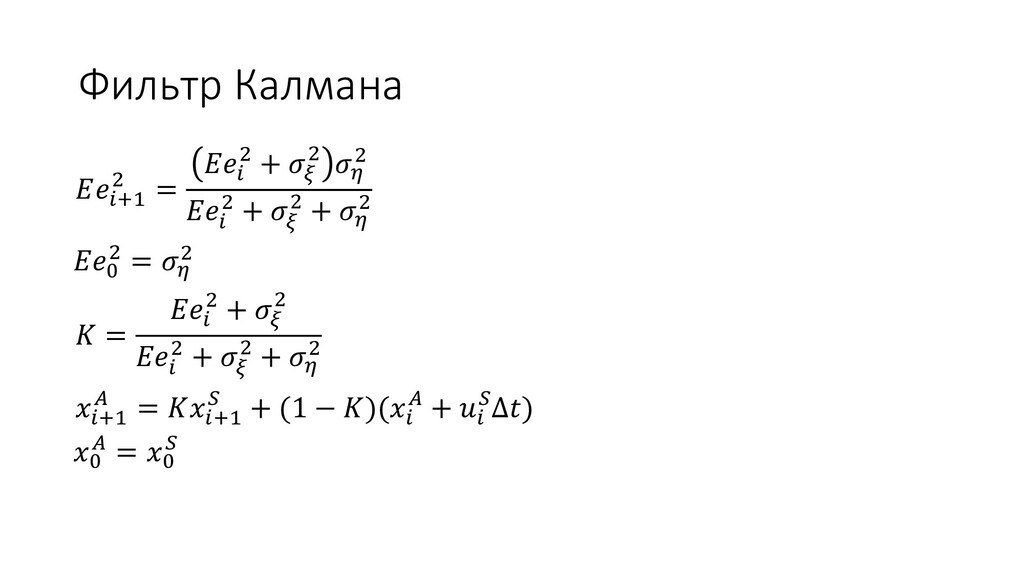
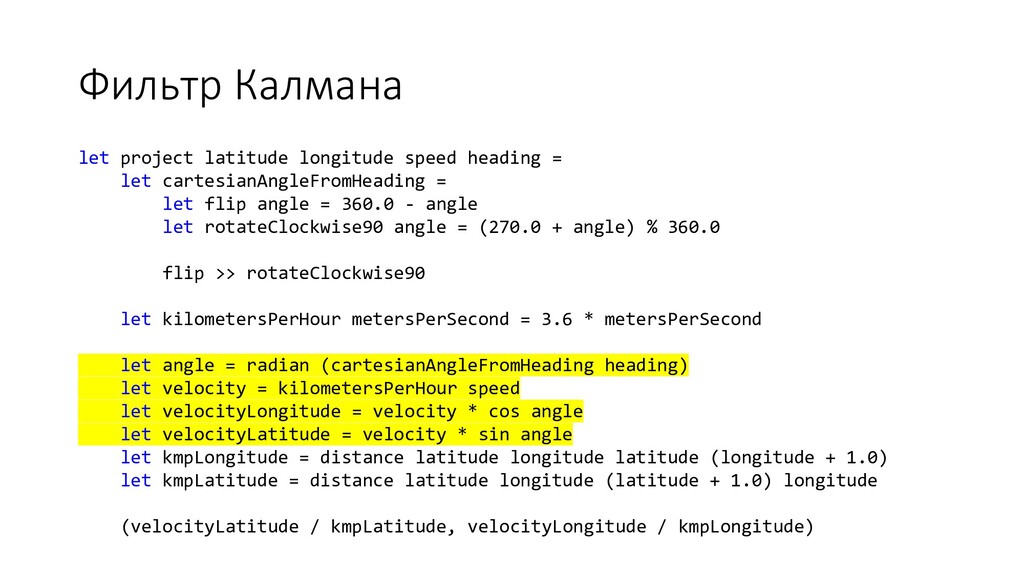
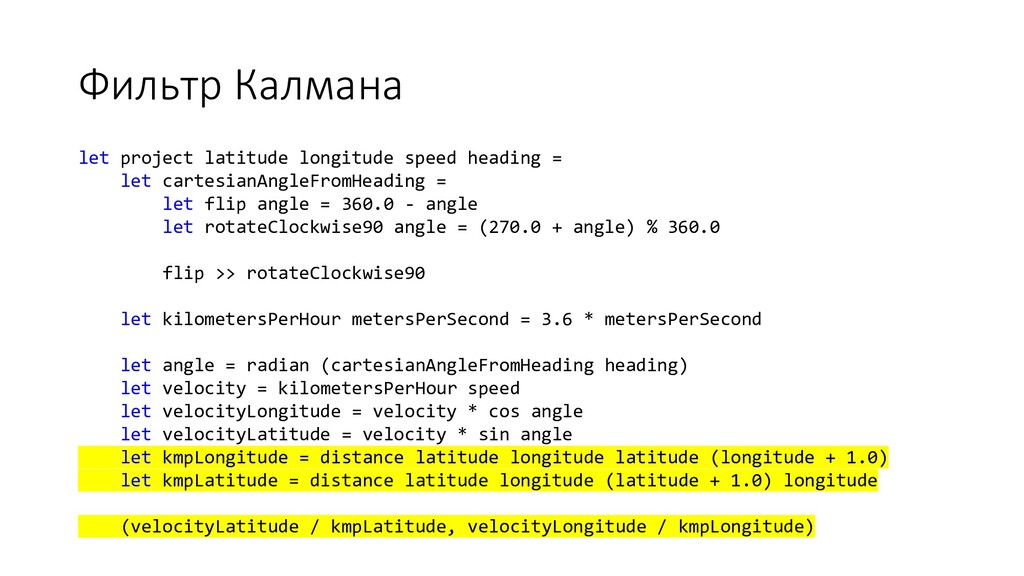
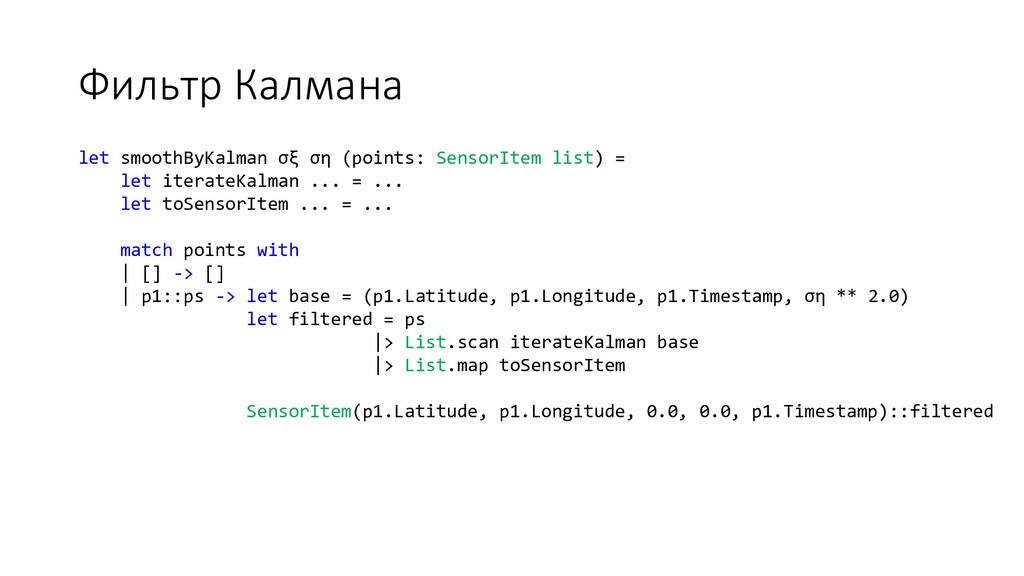
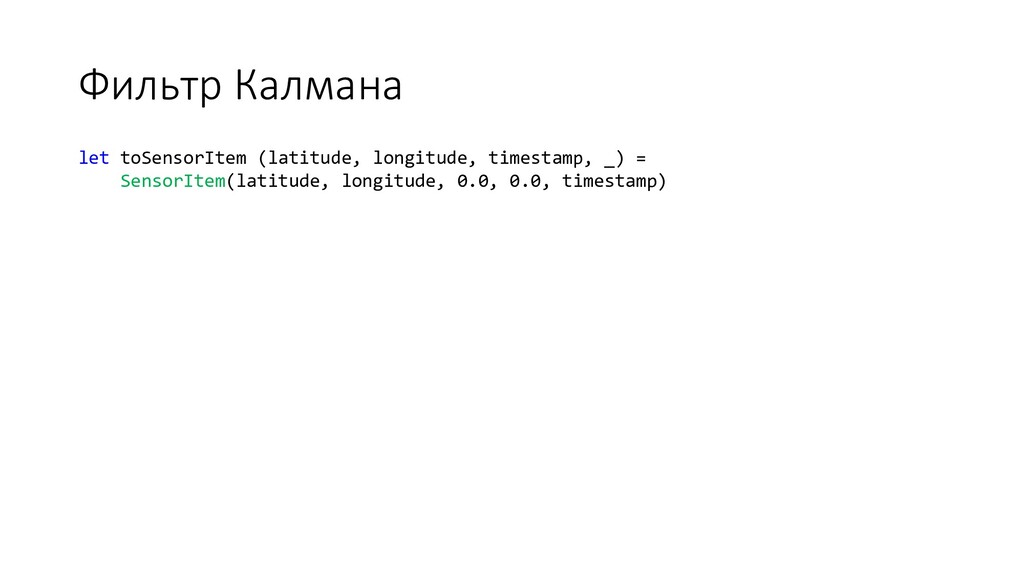
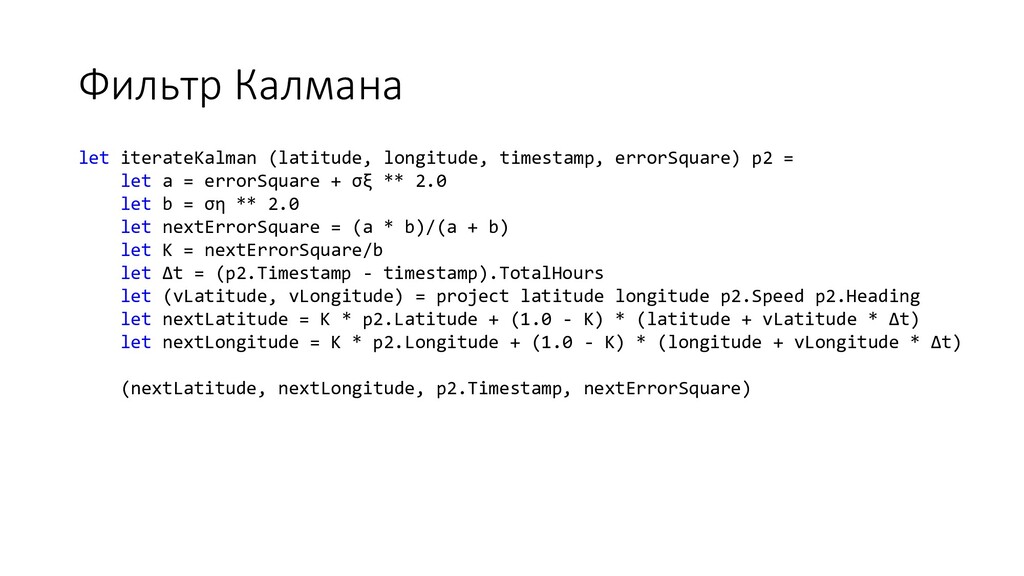
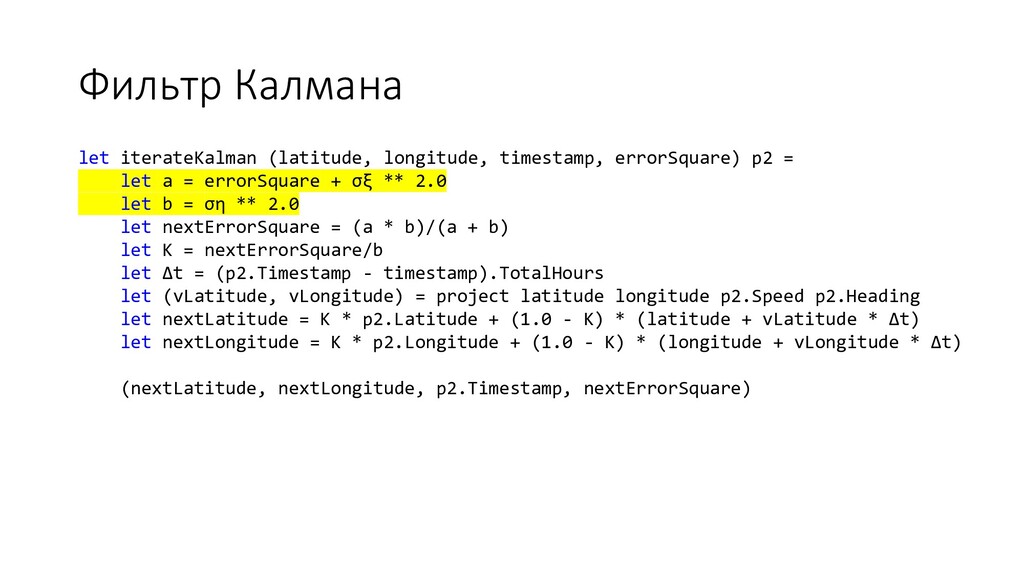
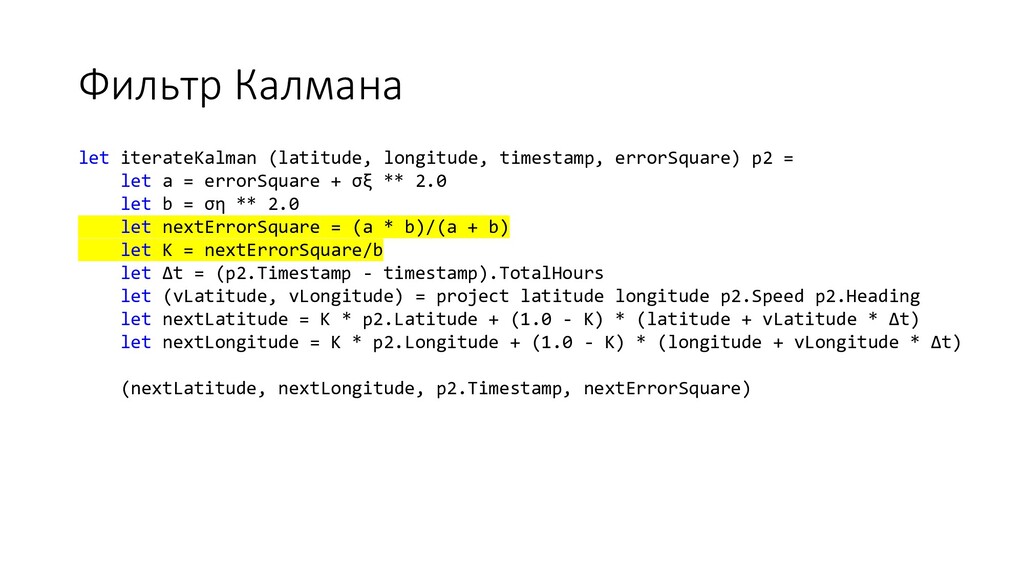
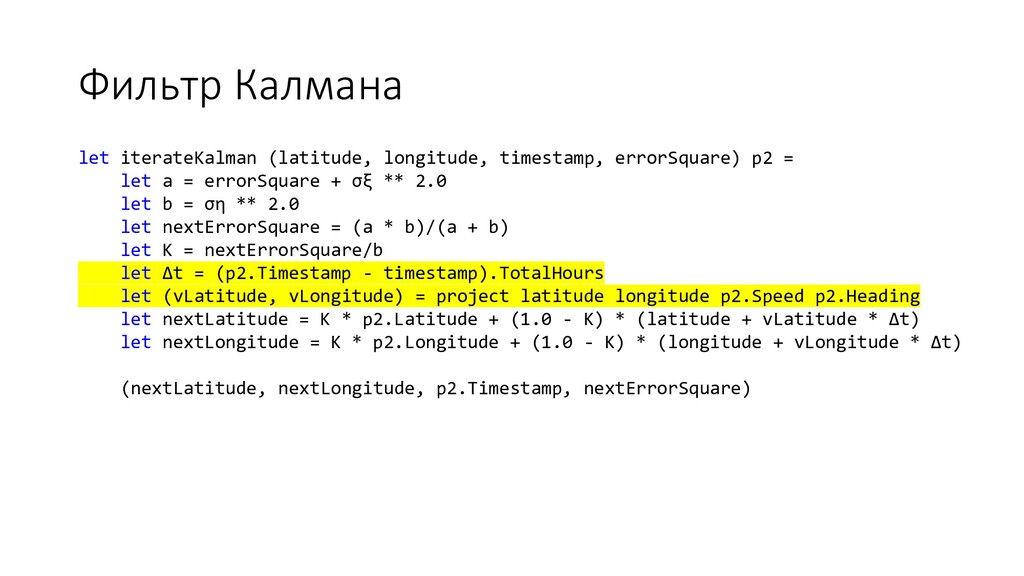
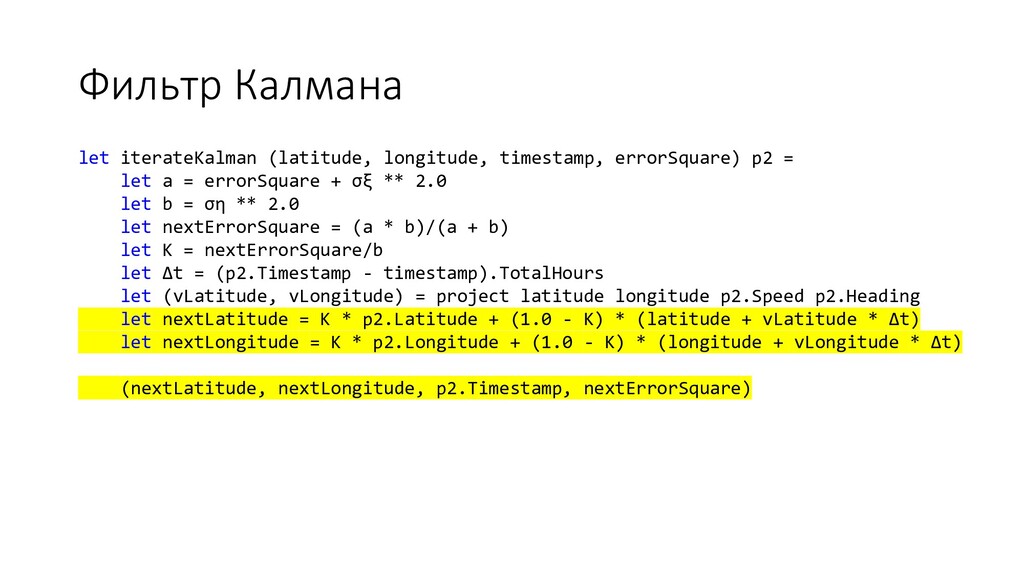
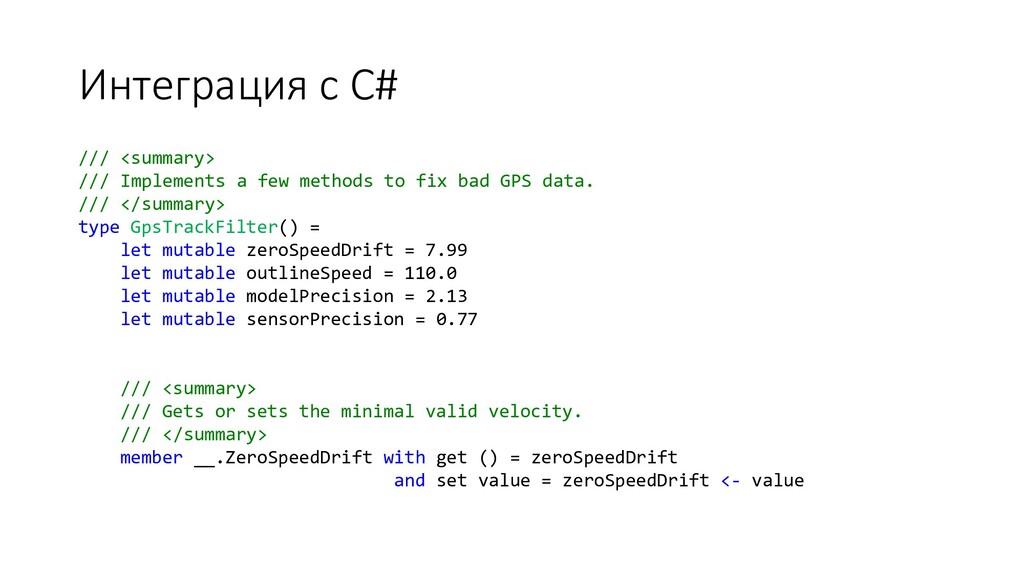
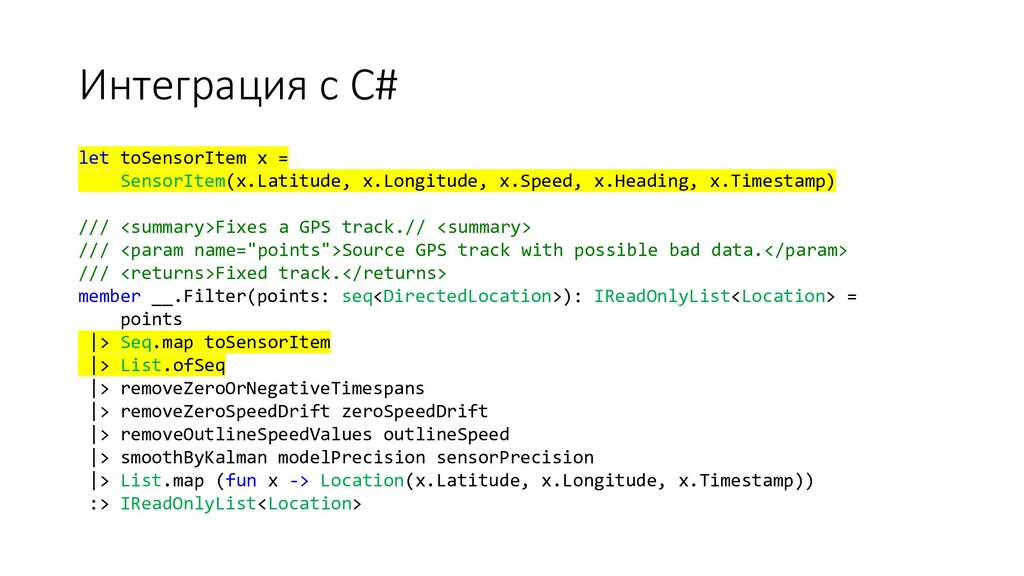
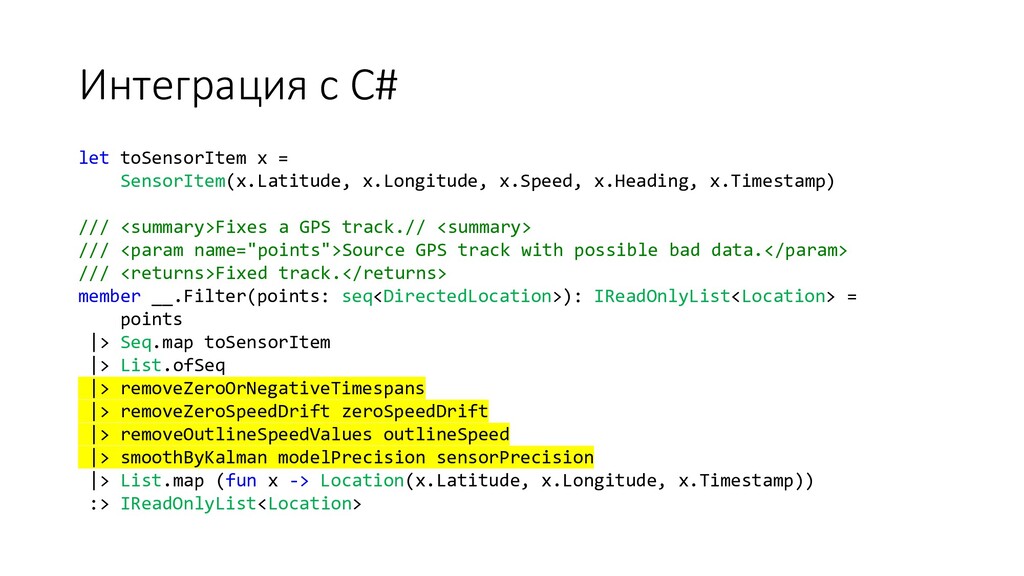
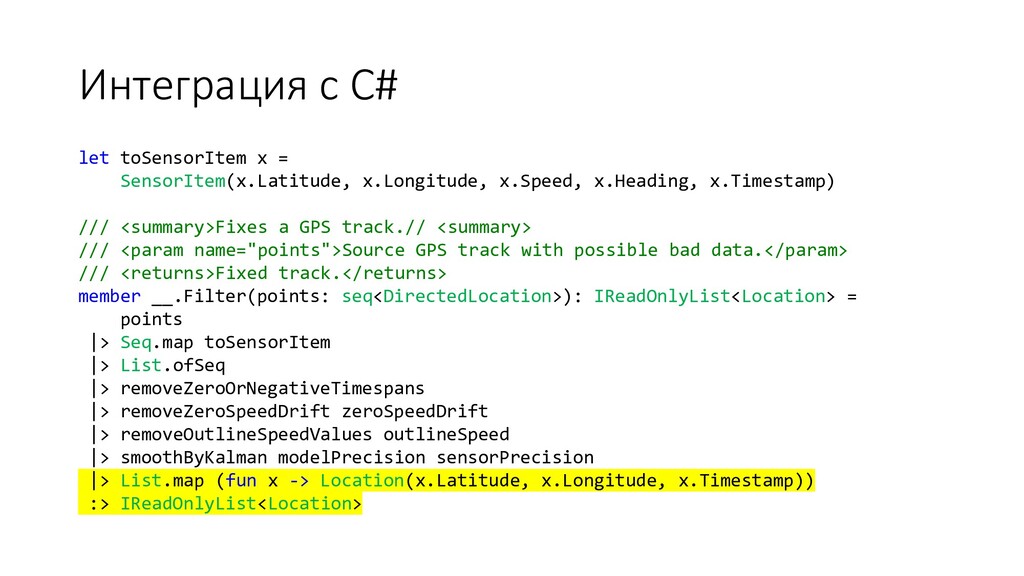
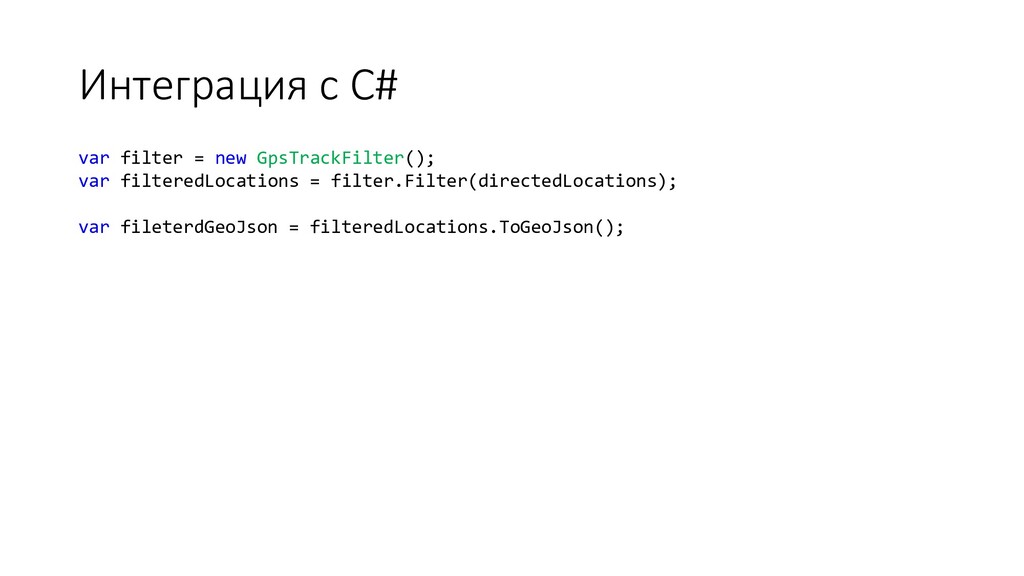
В рамках доклада Марк попробует продемонстрировать приёмы функциональной разработки на задаче фильтрации треков. Она действительно практическая — с одной стороны, а с другой — достаточно сложная. Эта задача способна продемонстрировать мощность функциональных средств. Мы поговорим о сферической геометрии, о модульном тестировании, о фильтре Калмана и о том, как подключить код F# к обычному проекту на C#. Библиотека, о которой спикер будет рассказывать, сейчас работает в Azure и в мобильном приложении, написанном на Xamarin. Никаких высоких материй, только практика, только хардкор.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
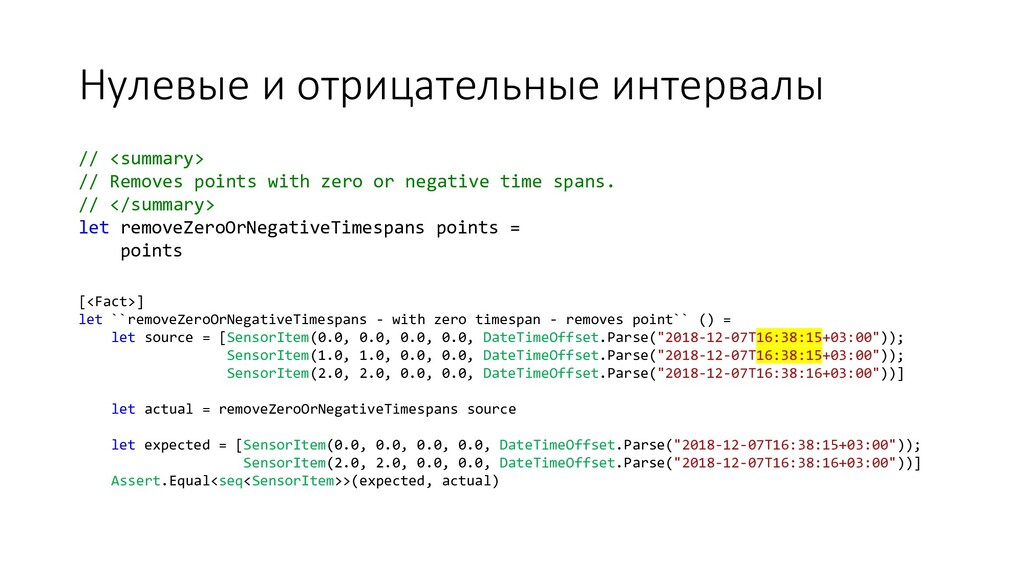
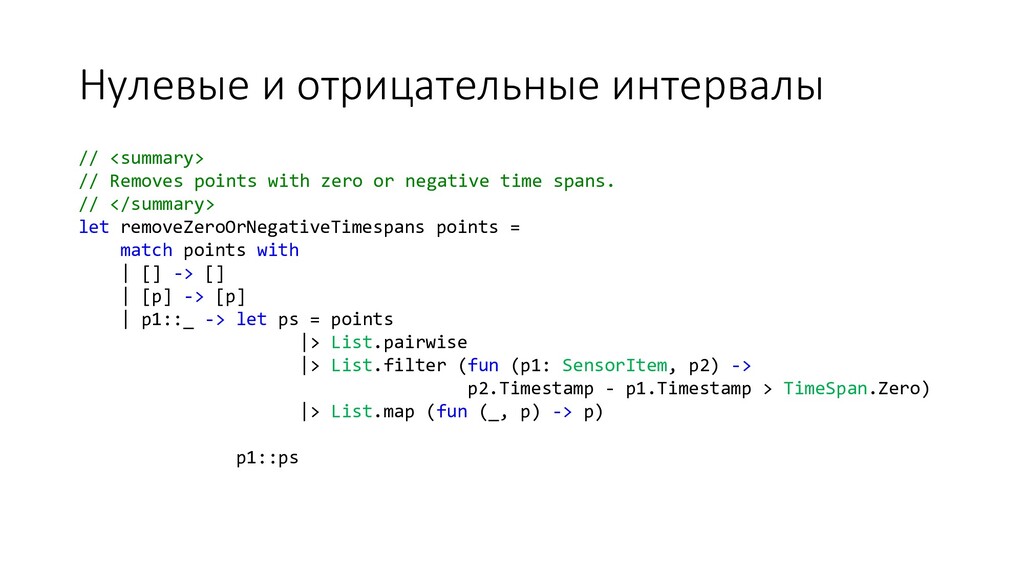
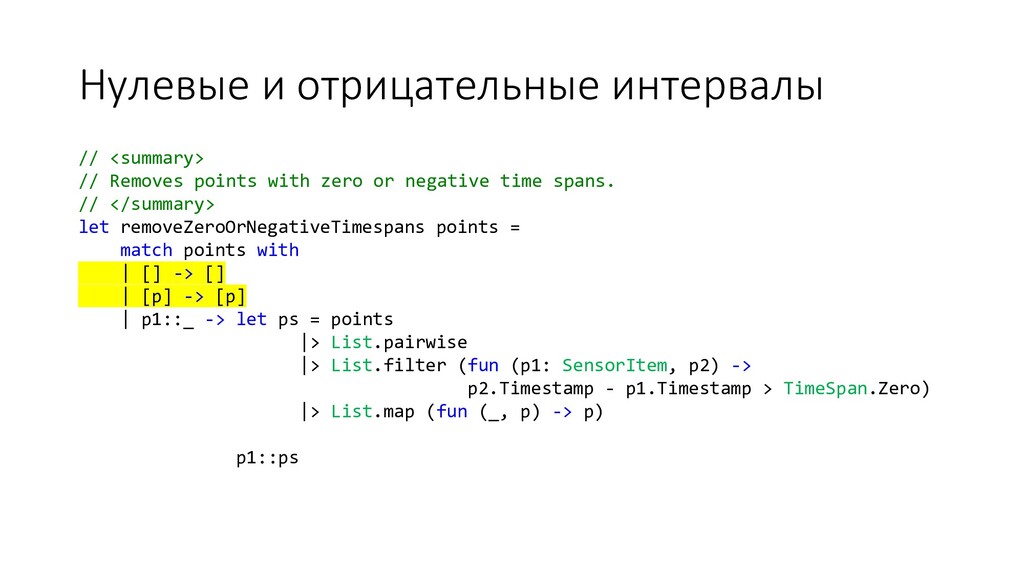
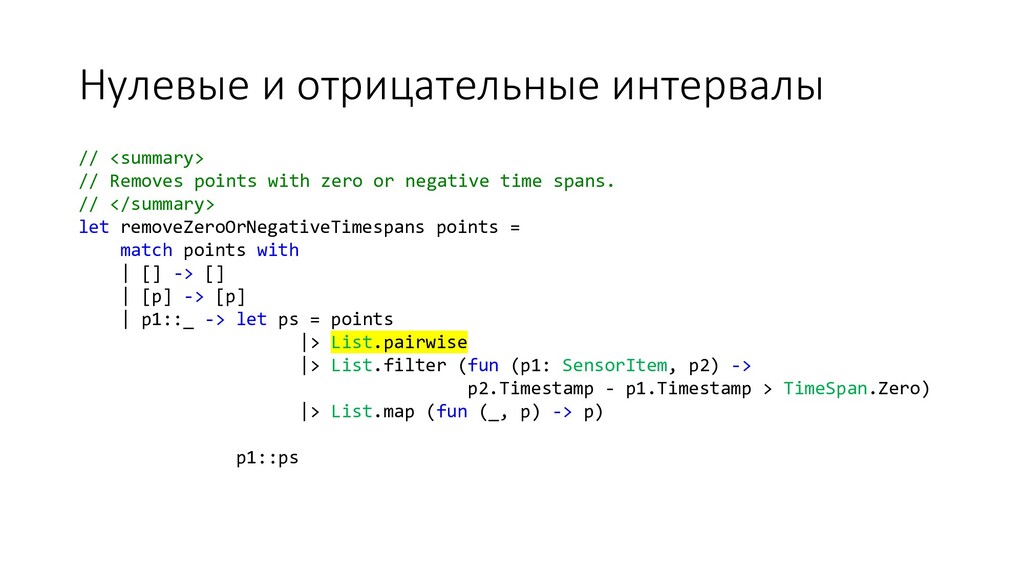
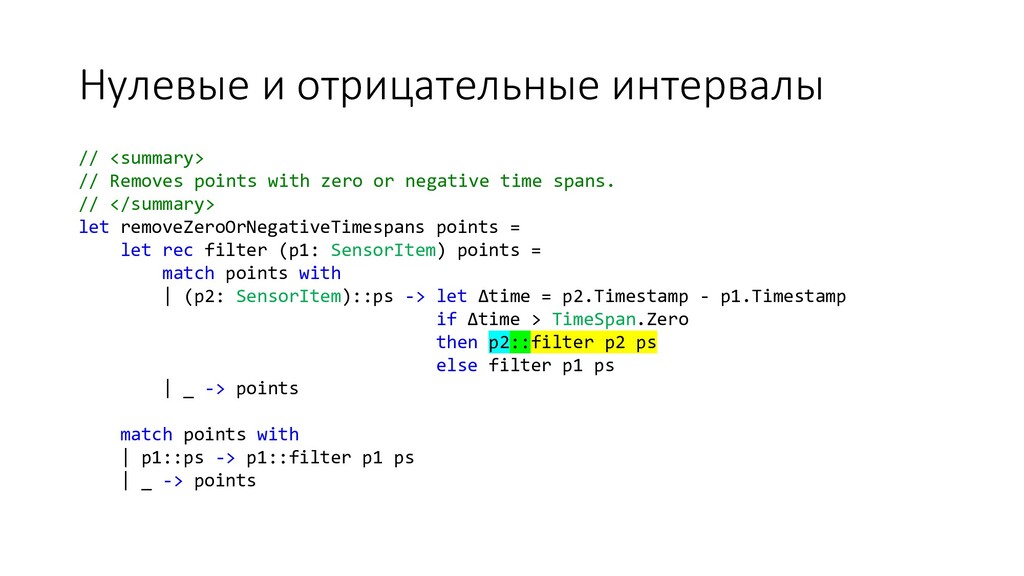
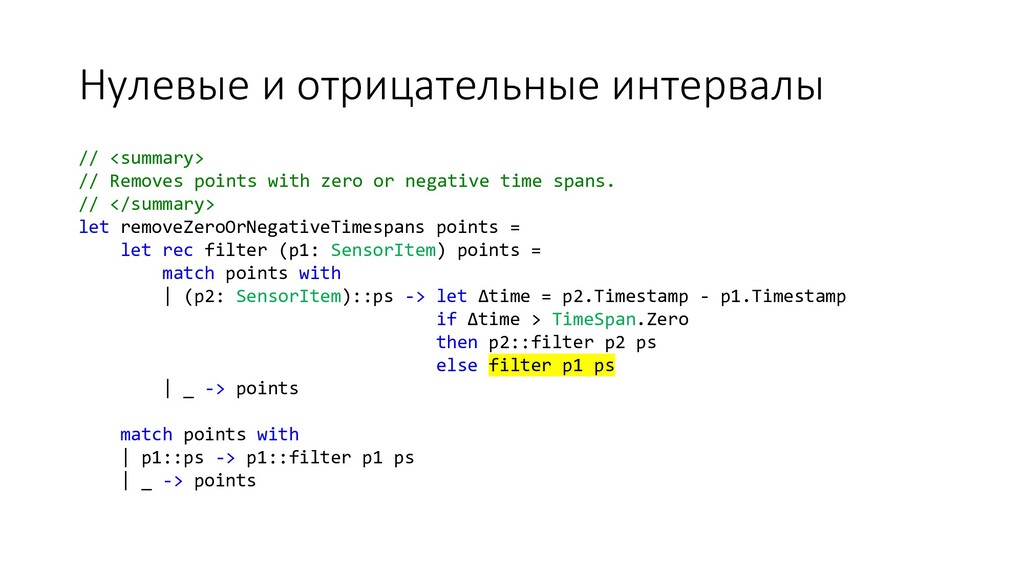
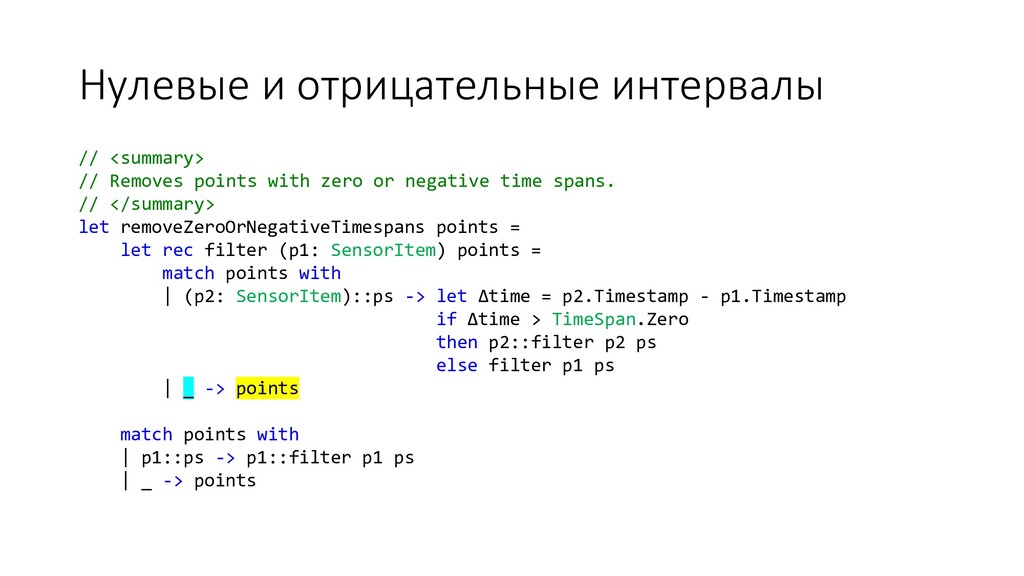
![Нулевые и отрицательные интервалы [<Fact>] let ``removeZeroOrNegativeTimespans - with positime](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
![Нулевые и отрицательные интервалы [<Fact>] let ``removeZeroOrNegativeTimespans - with two](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
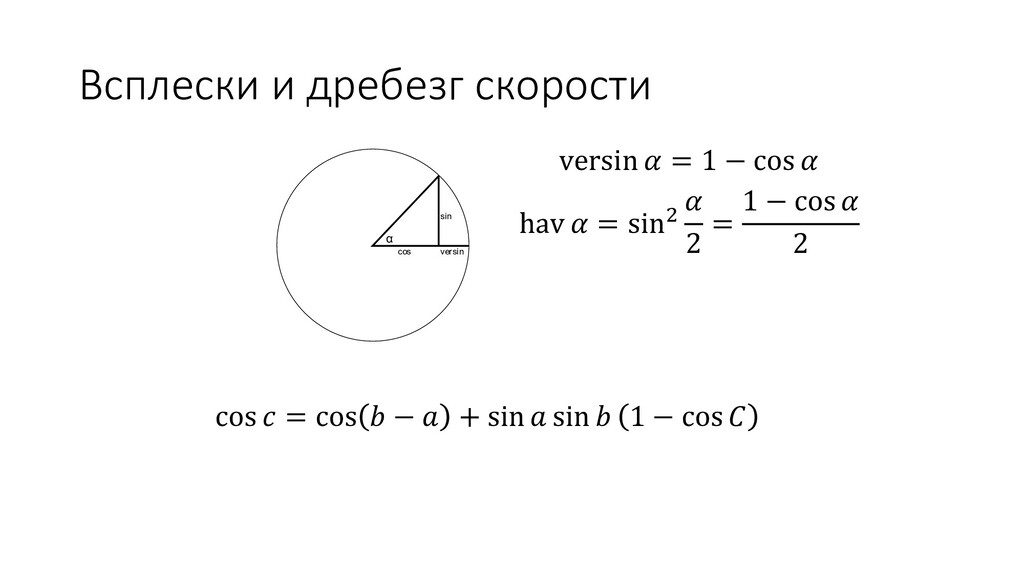
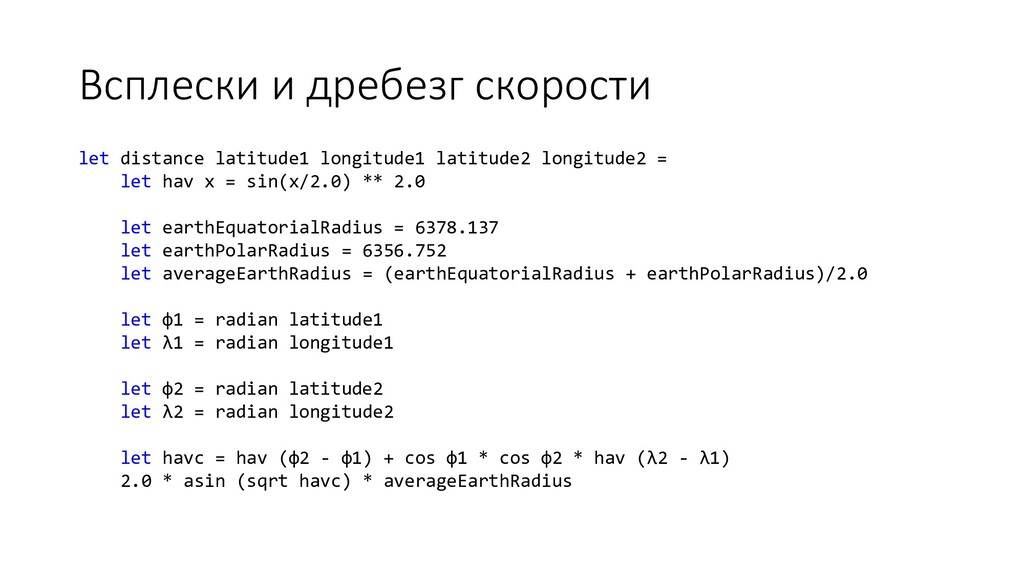
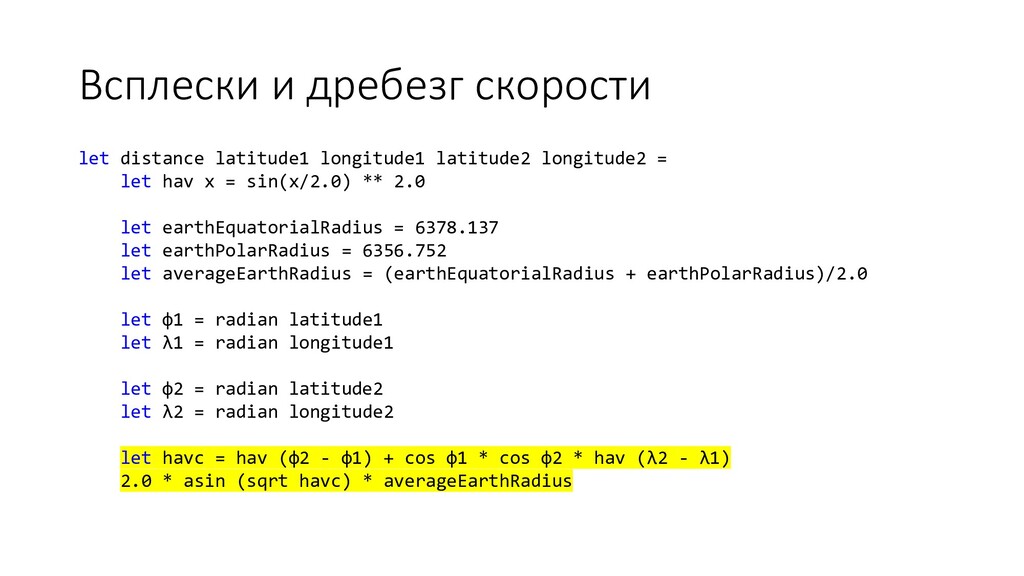
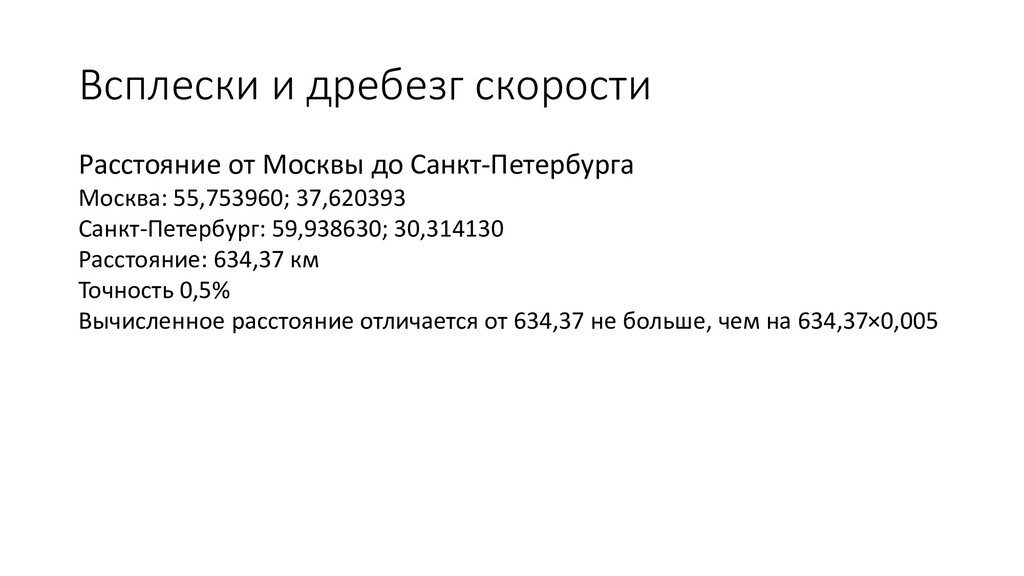
![Всплески и дребезг скорости [<Fact>] let ``distance - between Moscow](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_72.jpg){kind=link}
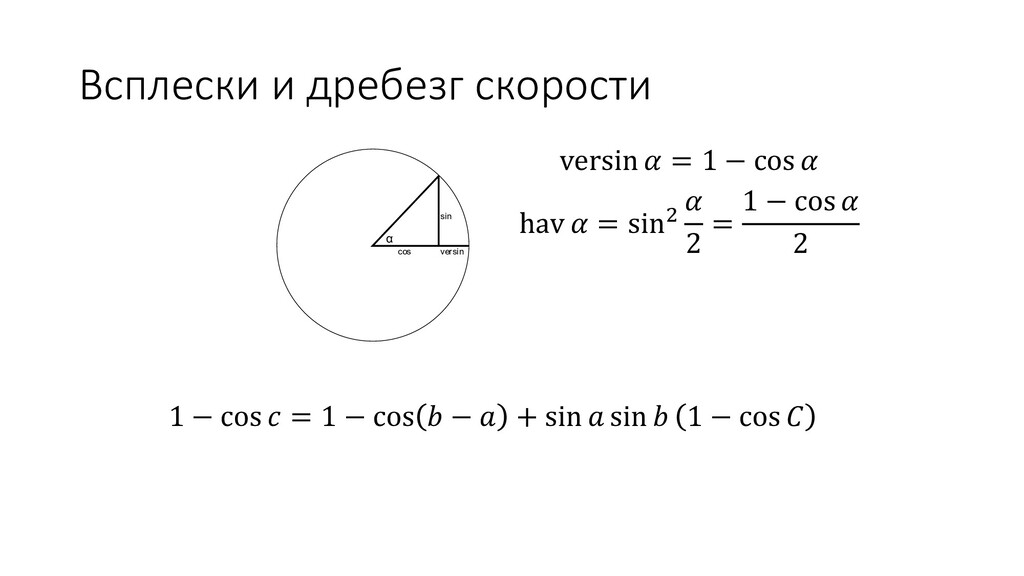
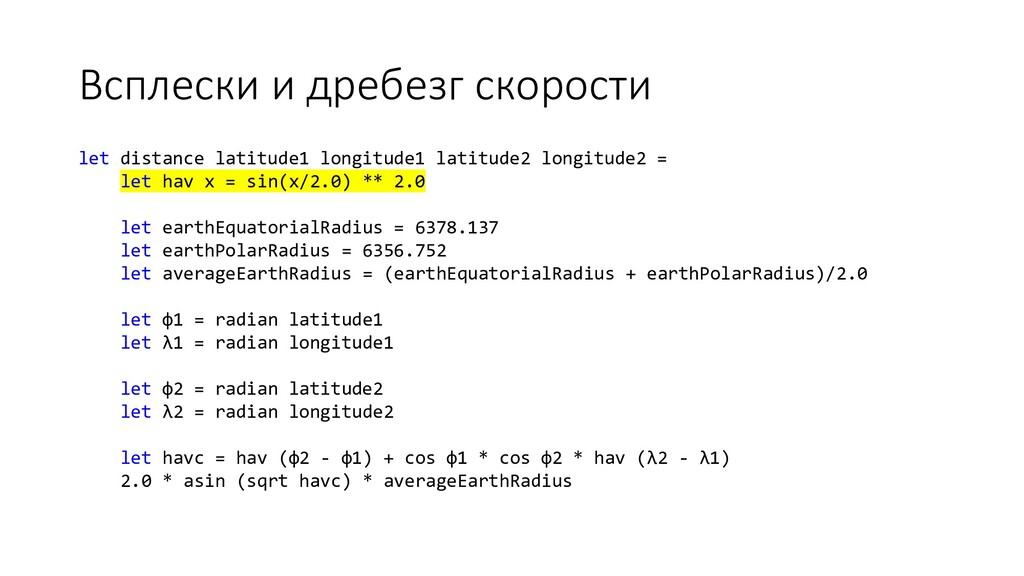
![Всплески и дребезг скорости [<Fact>] let ``distance - between Moscow](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_73.jpg){kind=link}
{kind=link}
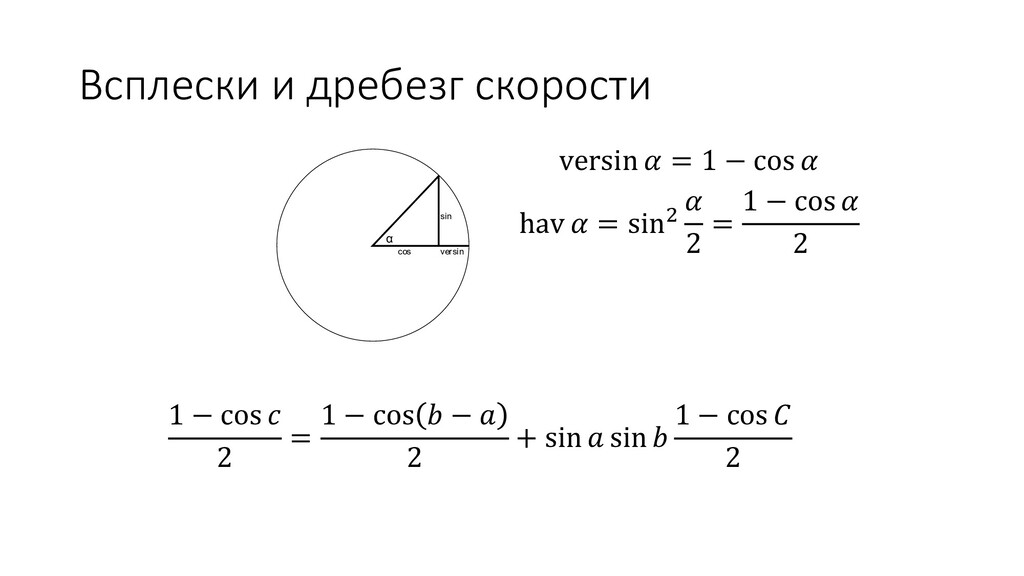
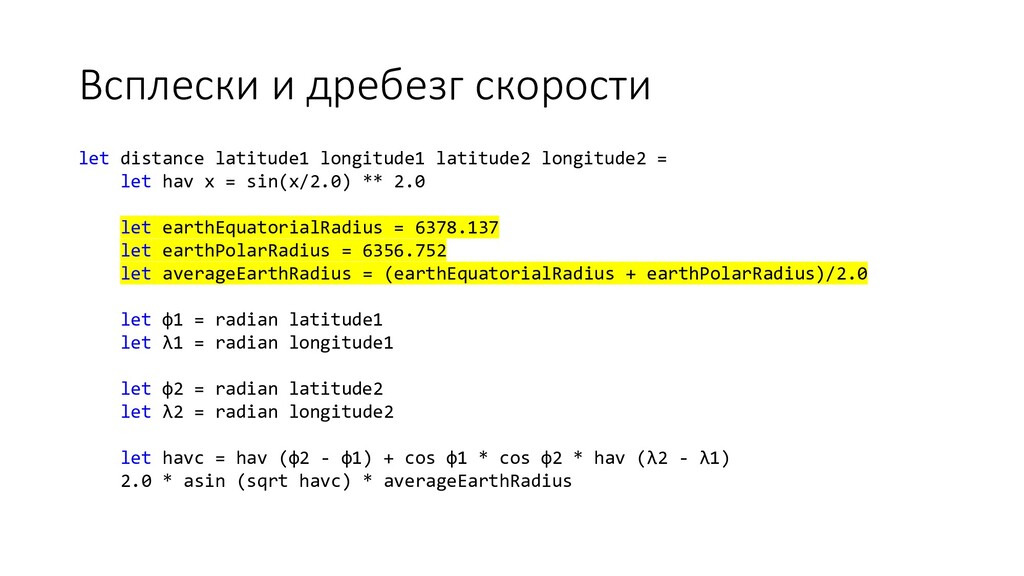
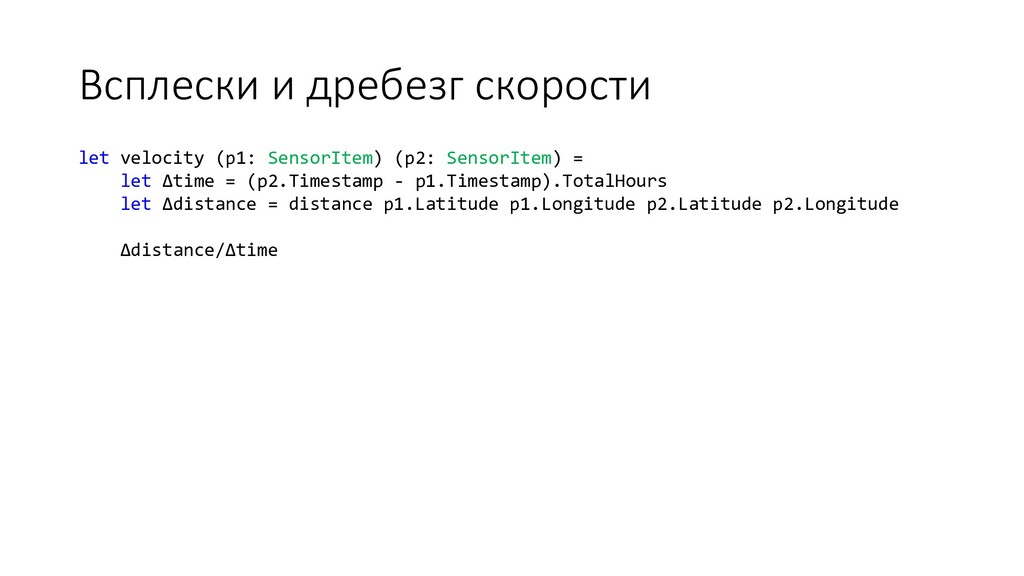
![Всплески и дребезг скорости [<Fact>] let ``velocity - with 1](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_75.jpg){kind=link}
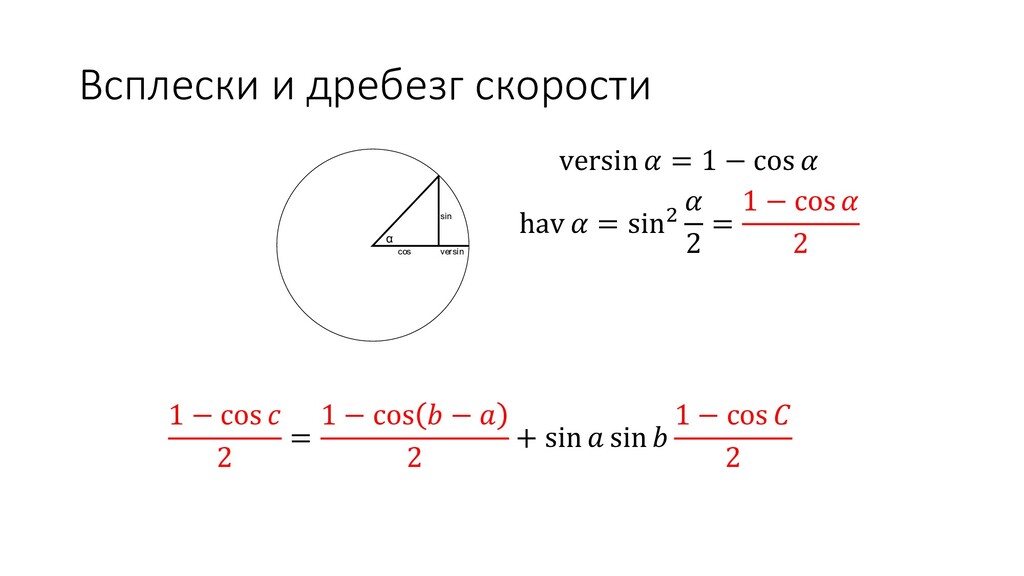
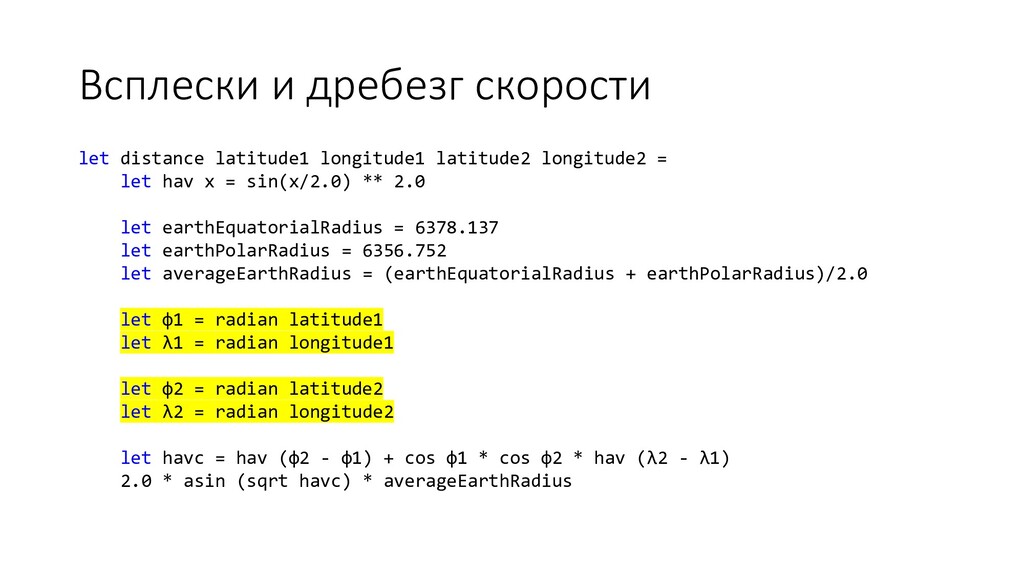
![Всплески и дребезг скорости [<Fact>] let ``velocity - with 1](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_76.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Фильтр Калмана [<Fact>] let ``smoothBySimplifiedKalman - with points - filters](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_140.jpg){kind=link}
![Интеграция с C# [<Struct>] type Location(latitude: float, longitude: float, timestamp:](https://files.speakerdeck.com/presentations/077ff6b656b44262b27feff94777e4e2/slide_141.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}