Final year project presentation for my BEng.
The abstract of the accompanying project report:
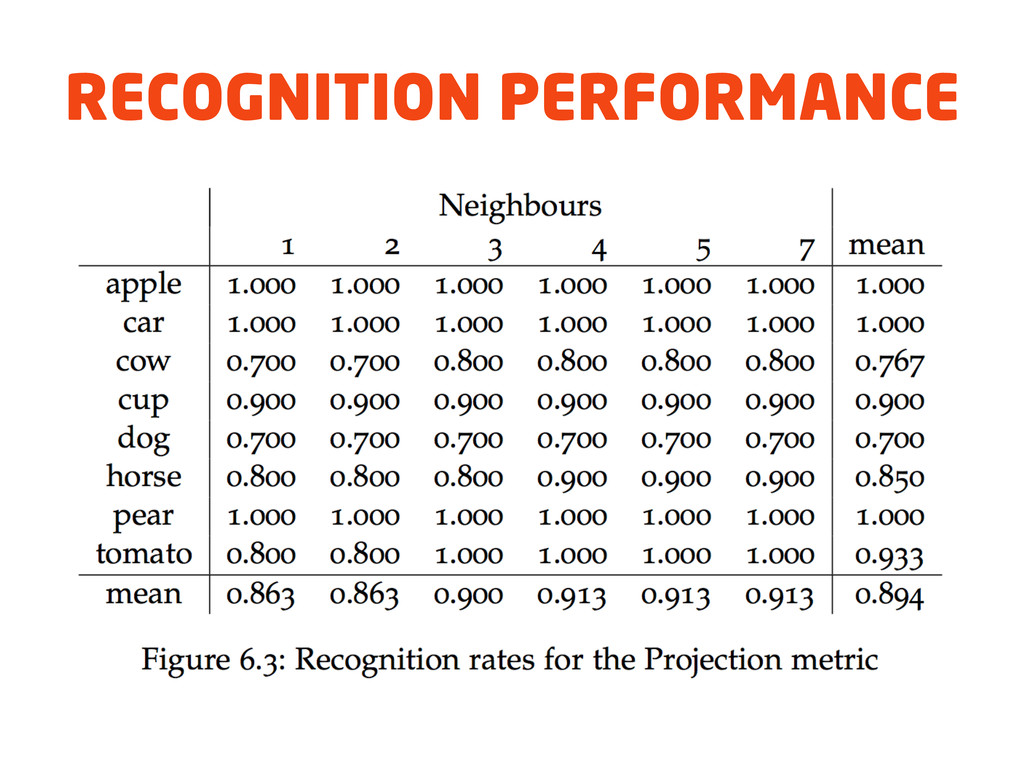
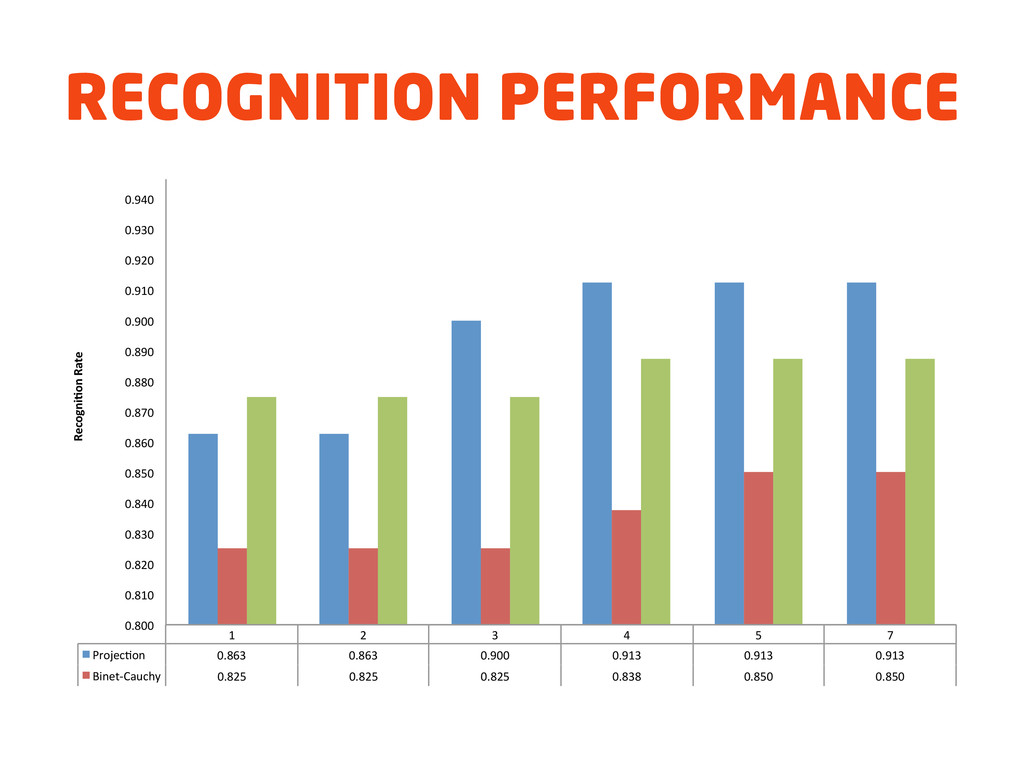
"The use of Grassmannian Manifolds has proved a novel solution to the problem of facial recognition. In this project their application to the more general field of object recognition is assessed, a discussion of the existing literature is undertaken, and an example implementation is created. A comparison is made of three different measures of subspace distance: Geodesic, Projection and Binet-Cauchy. A discussion of the process of implementing the algorithm is made. The effectiveness of the implementation is evaluated using the ETH-80 data set. The results are interpreted and the effectiveness of each of the distance measures is assessed."
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![GRASSMANN KERNEL MAPPING [M. Harandi et. al.]](https://files.speakerdeck.com/presentations/47c0cd6097340130e0d62a20bbac6ecb/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}