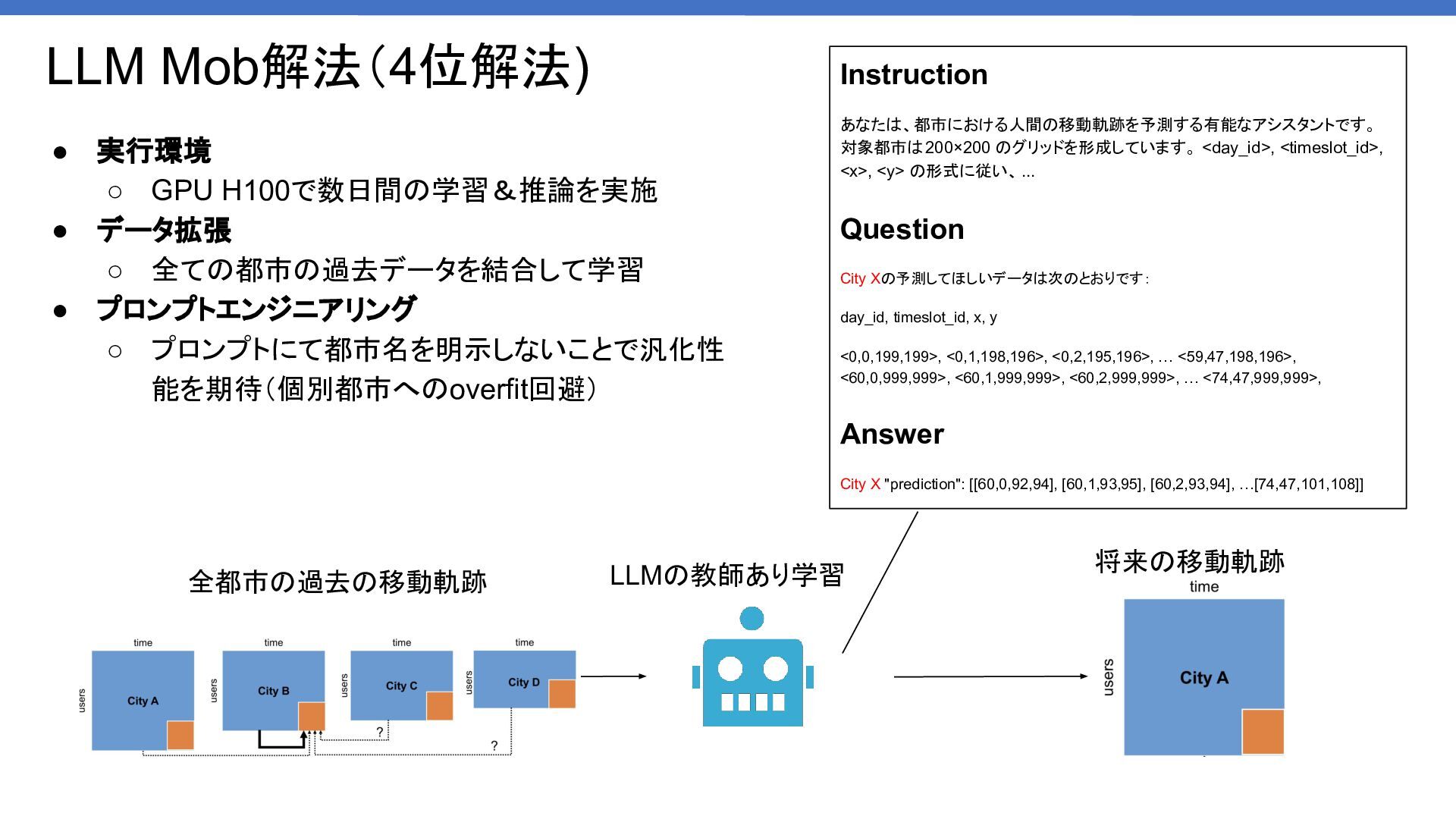
• プロンプトエンジニアリング ◦ プロンプトにて都市名を明示しないことで汎化性 能を期待(個別都市へのoverfit回避) LLMの教師あり学習 LLM Mob解法(4位解法) 全都市の過去の移動軌跡 Instruction あなたは、都市における人間の移動軌跡を予測する有能なアシスタントです。 対象都市は200×200 のグリッドを形成しています。 <day_id>, <timeslot_id>, <x>, <y> の形式に従い、... Question City Xの予測してほしいデータは次のとおりです: day_id, timeslot_id, x, y <0,0,199,199>, <0,1,198,196>, <0,2,195,196>, … <59,47,198,196>, <60,0,999,999>, <60,1,999,999>, <60,2,999,999>, … <74,47,999,999>, Answer City X "prediction": [[60,0,92,94], [60,1,93,95], [60,2,93,94], …[74,47,101,108]]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}