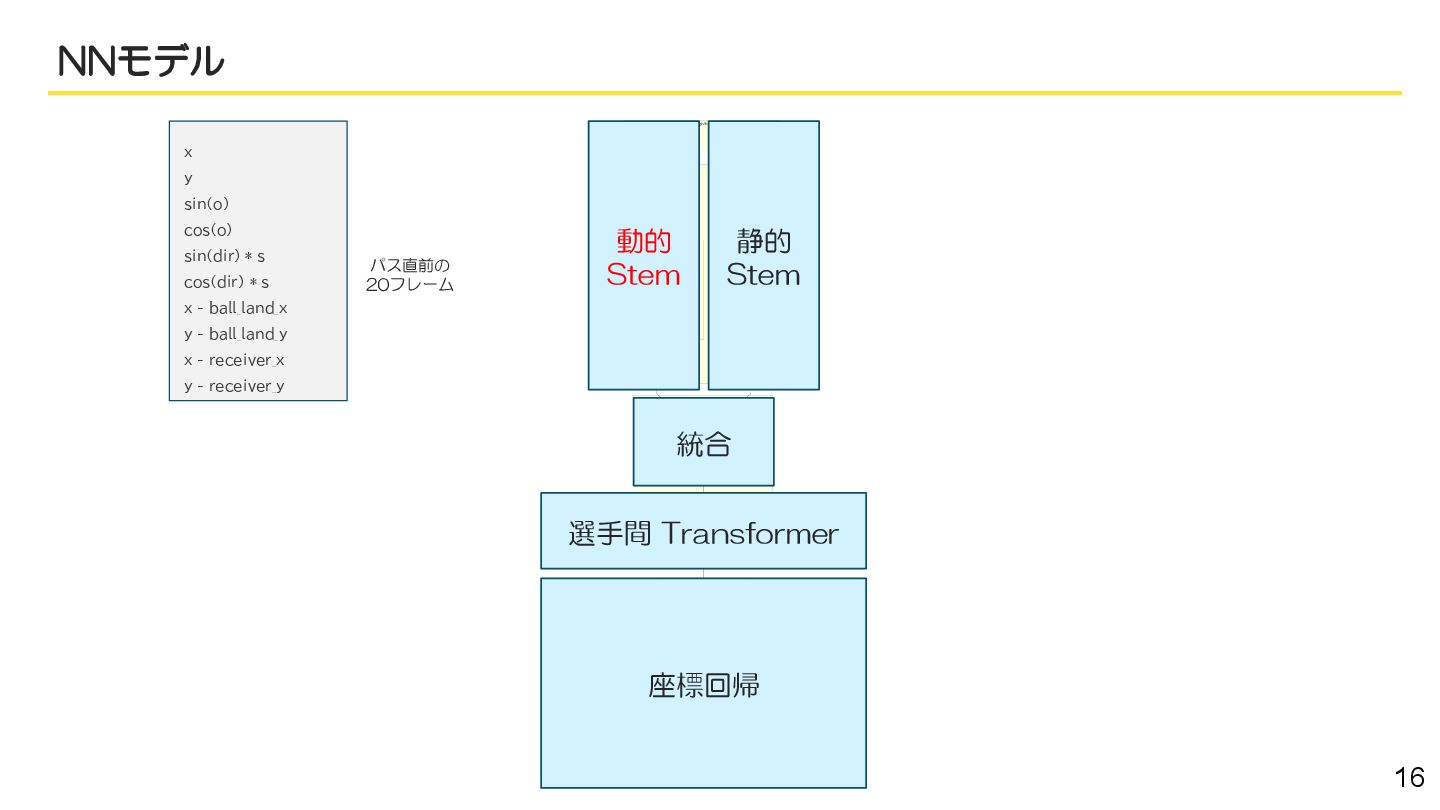
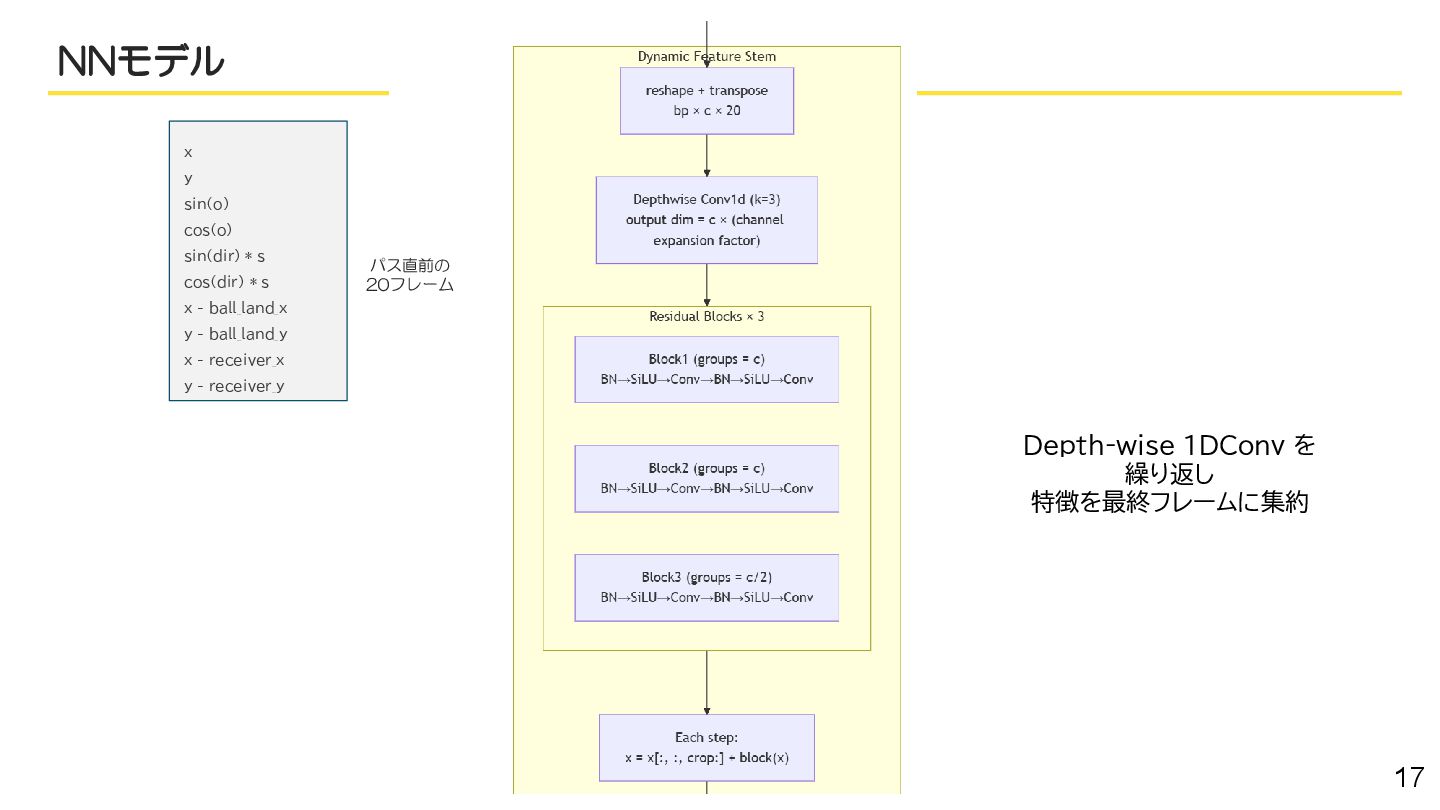
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム Depth-wise 1DConv を 繰り返し 特徴を最終フレームに集約
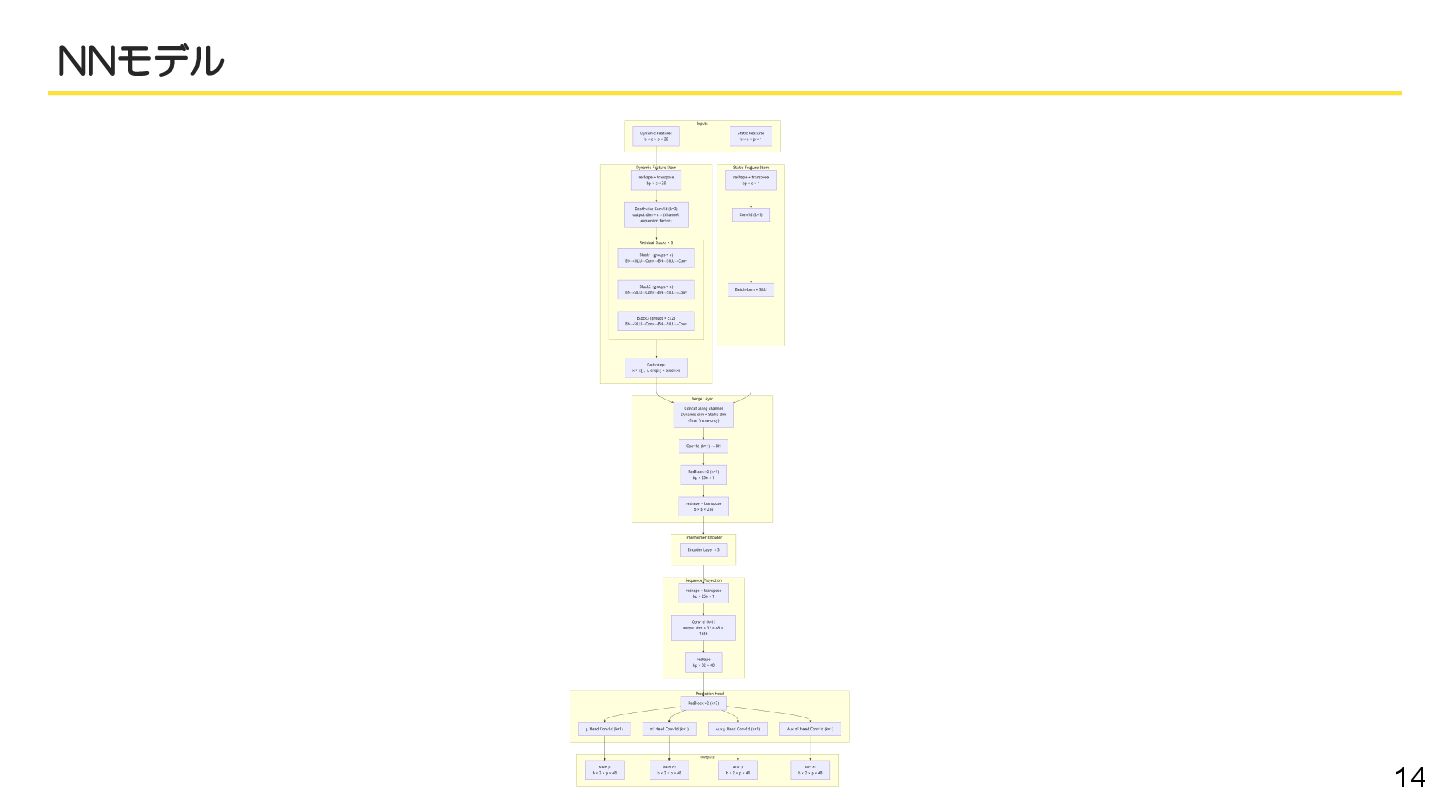
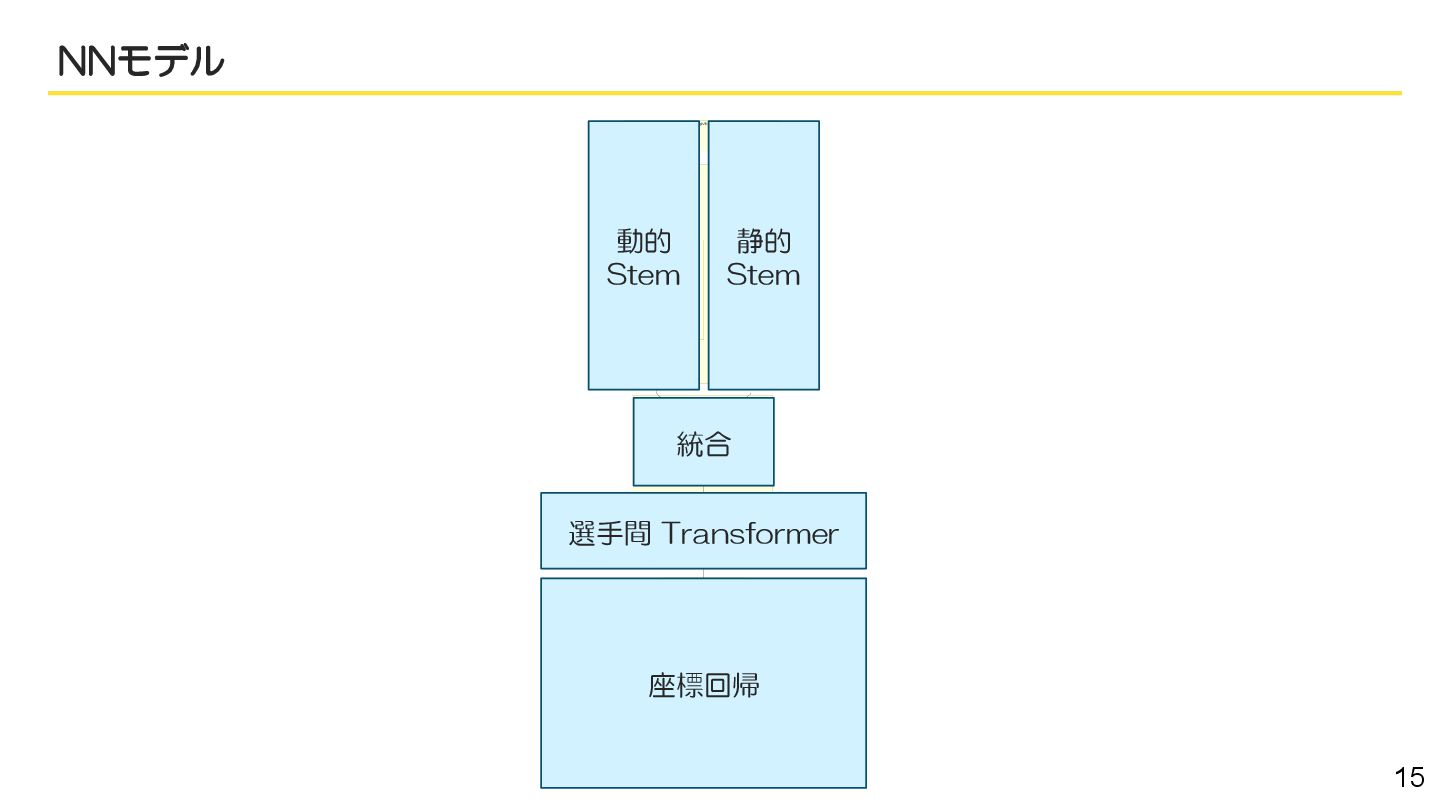
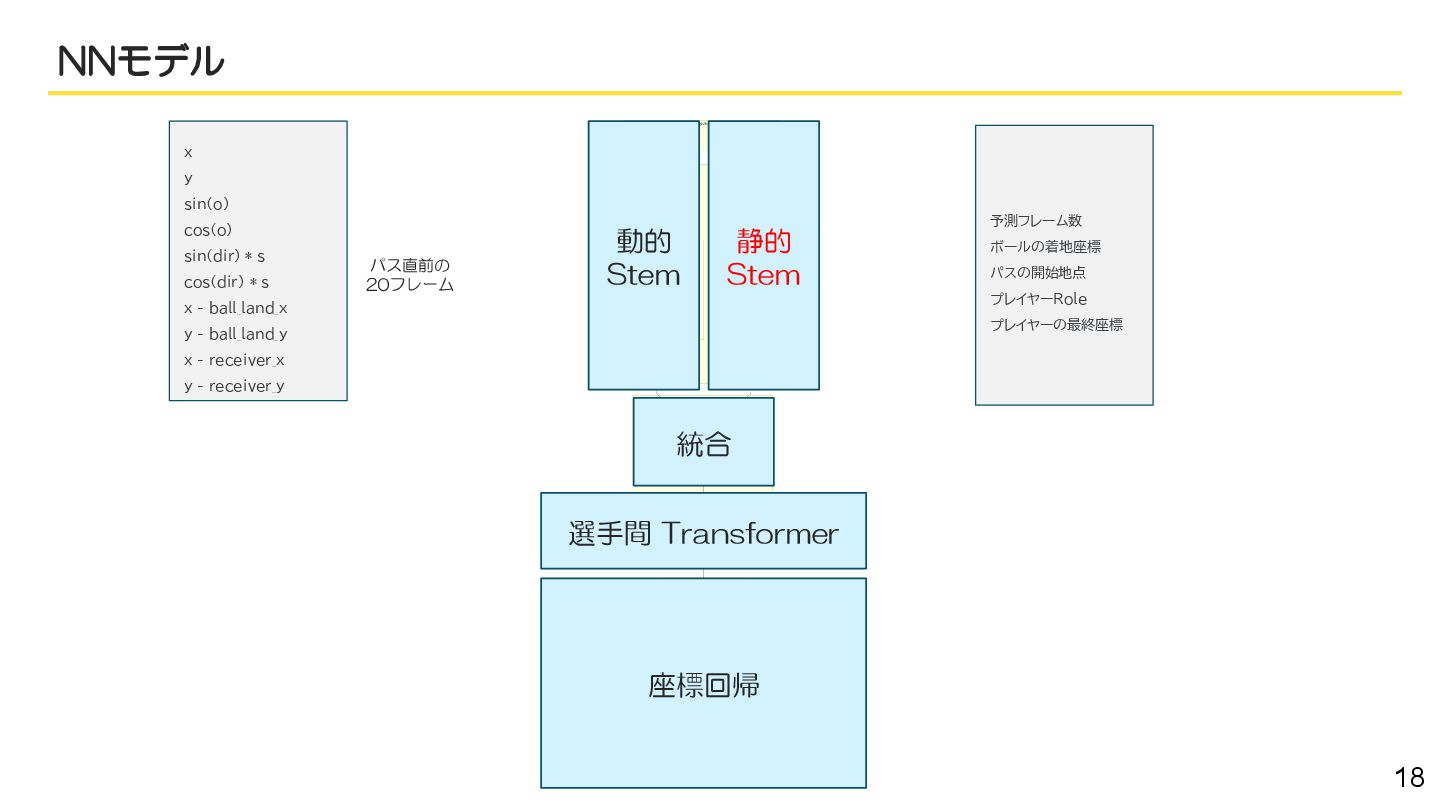
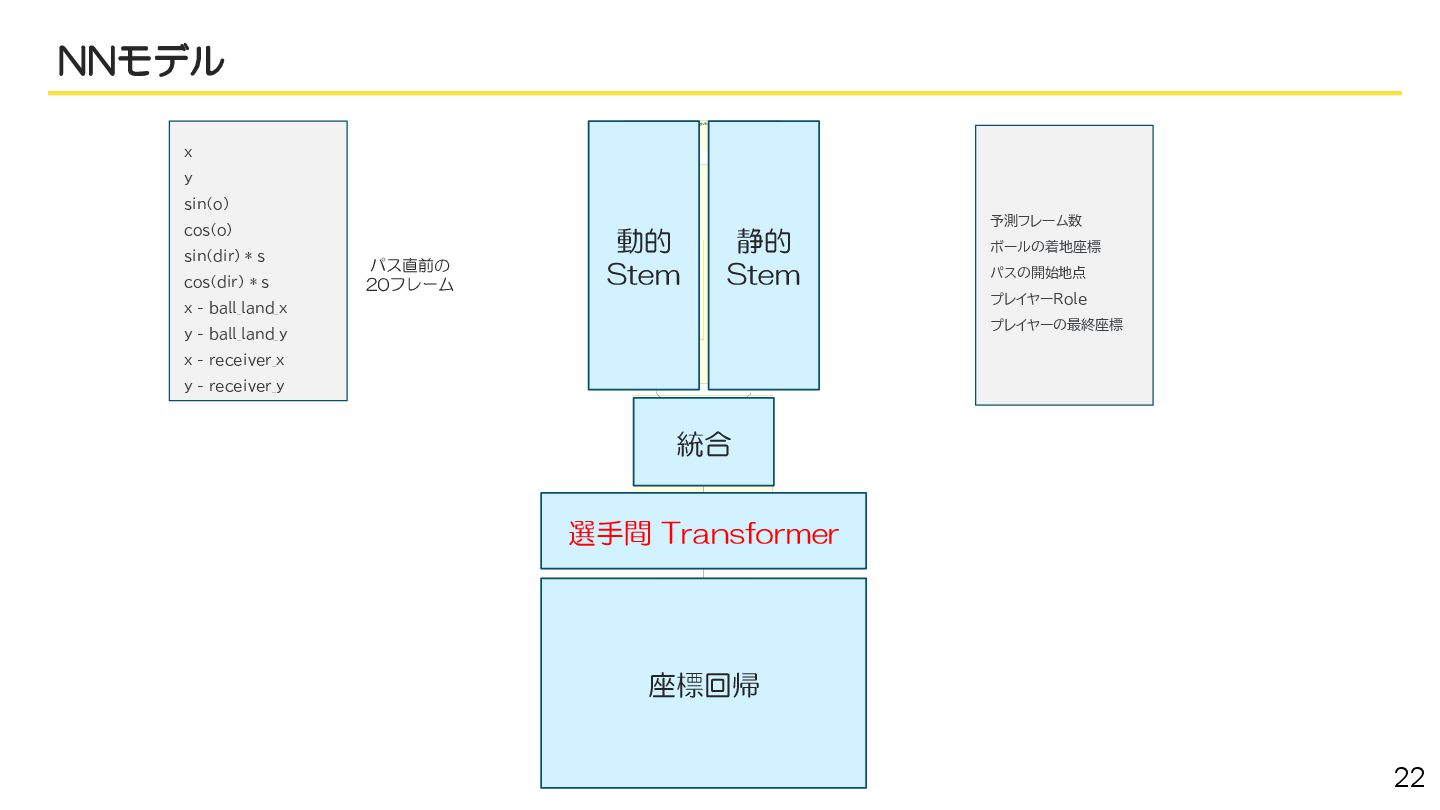
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標
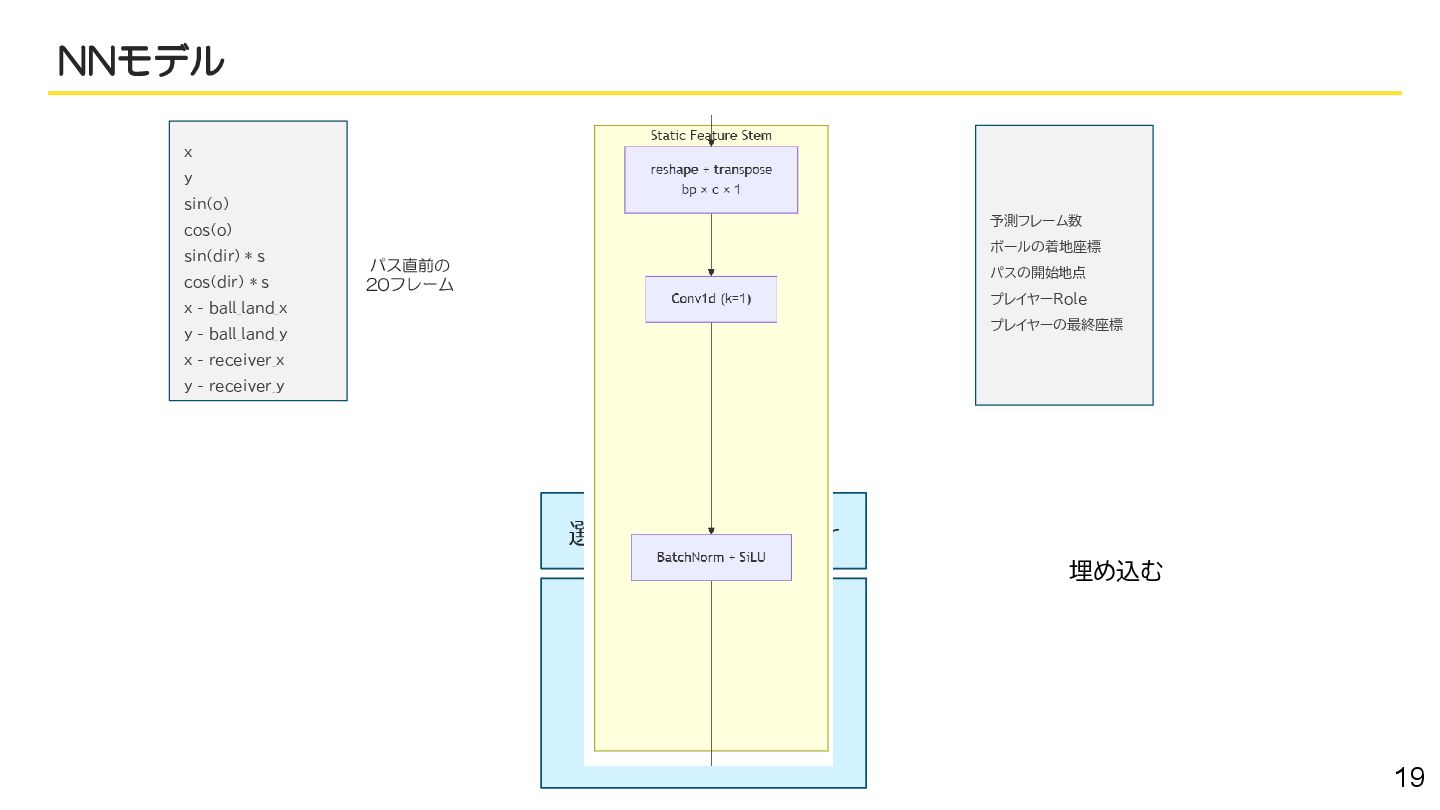
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標 埋め込む
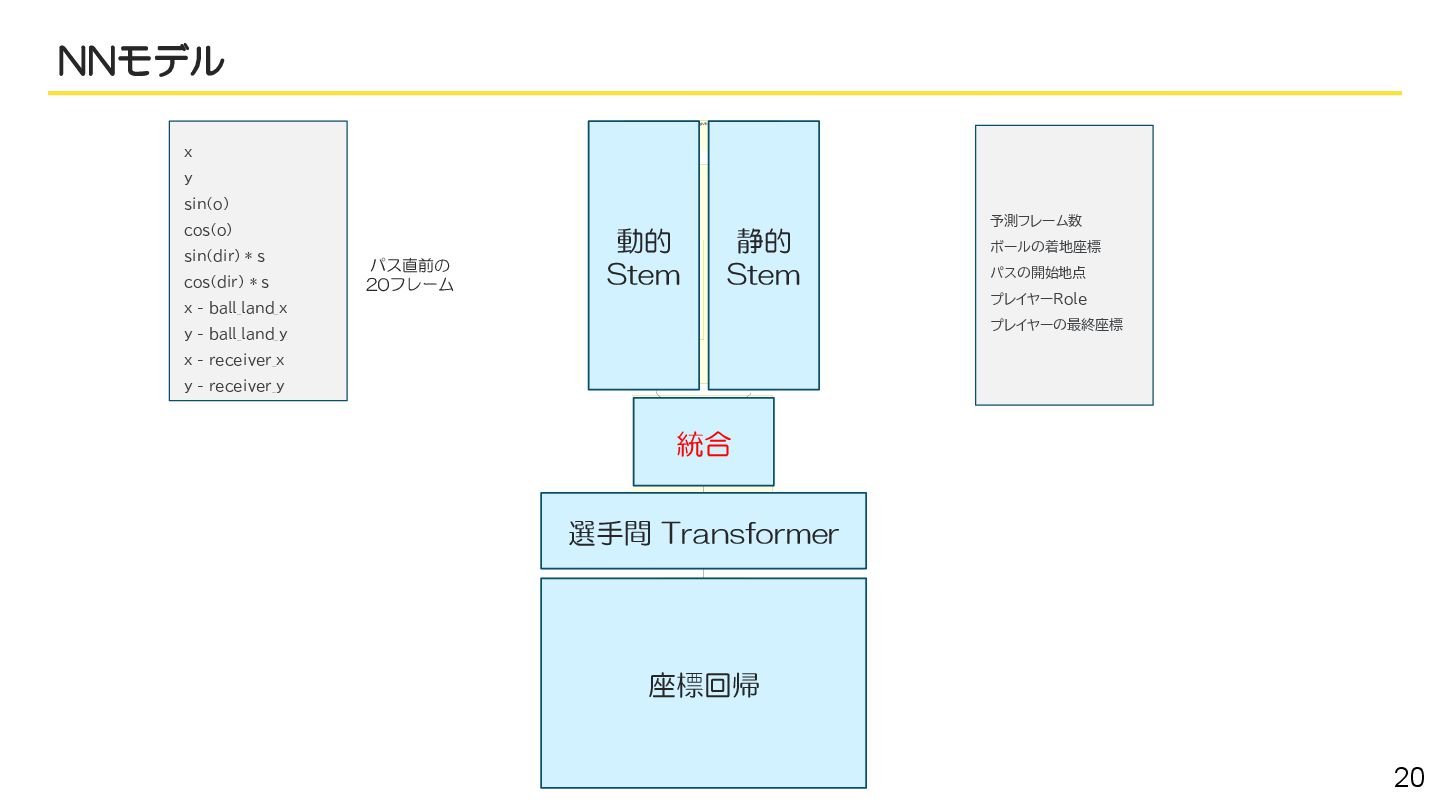
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標
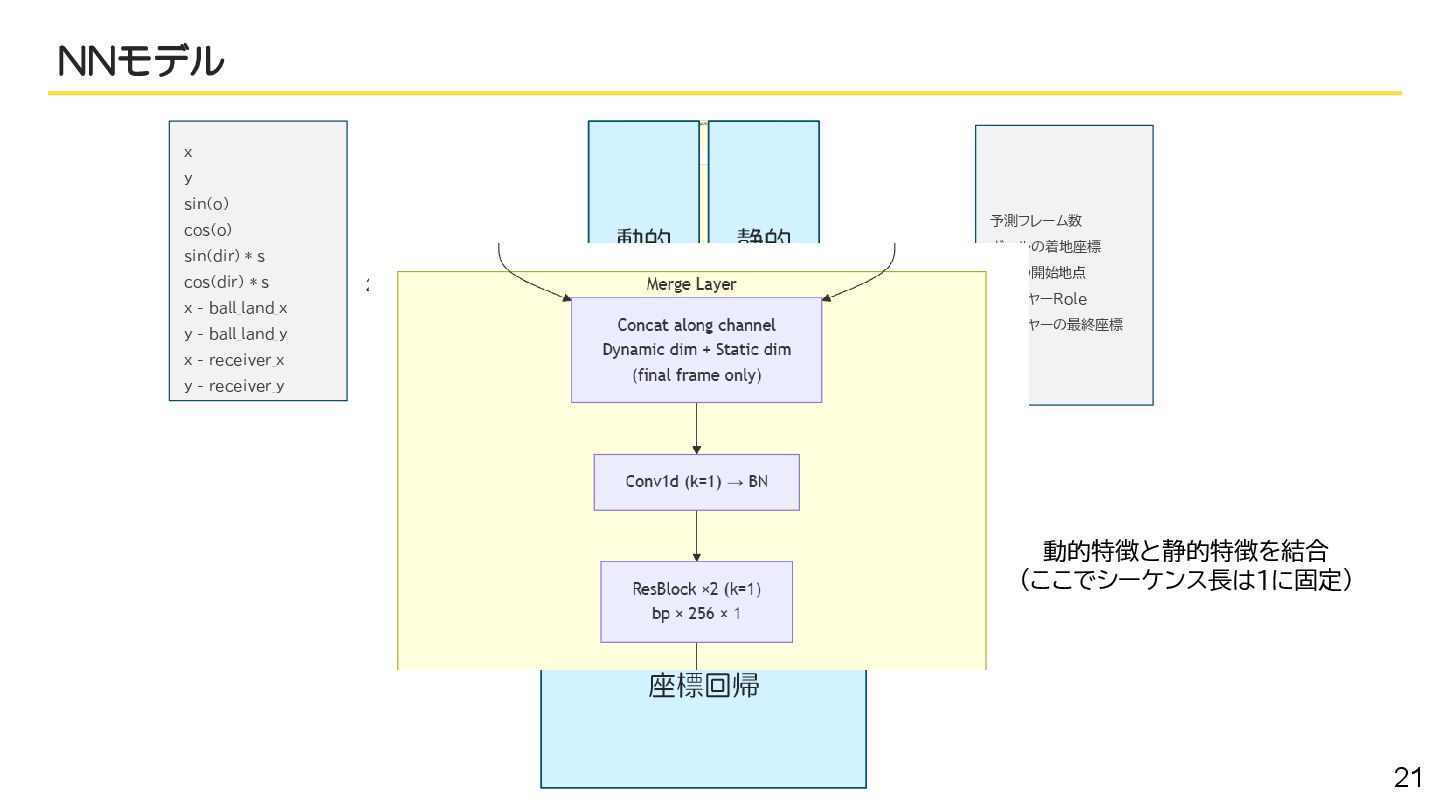
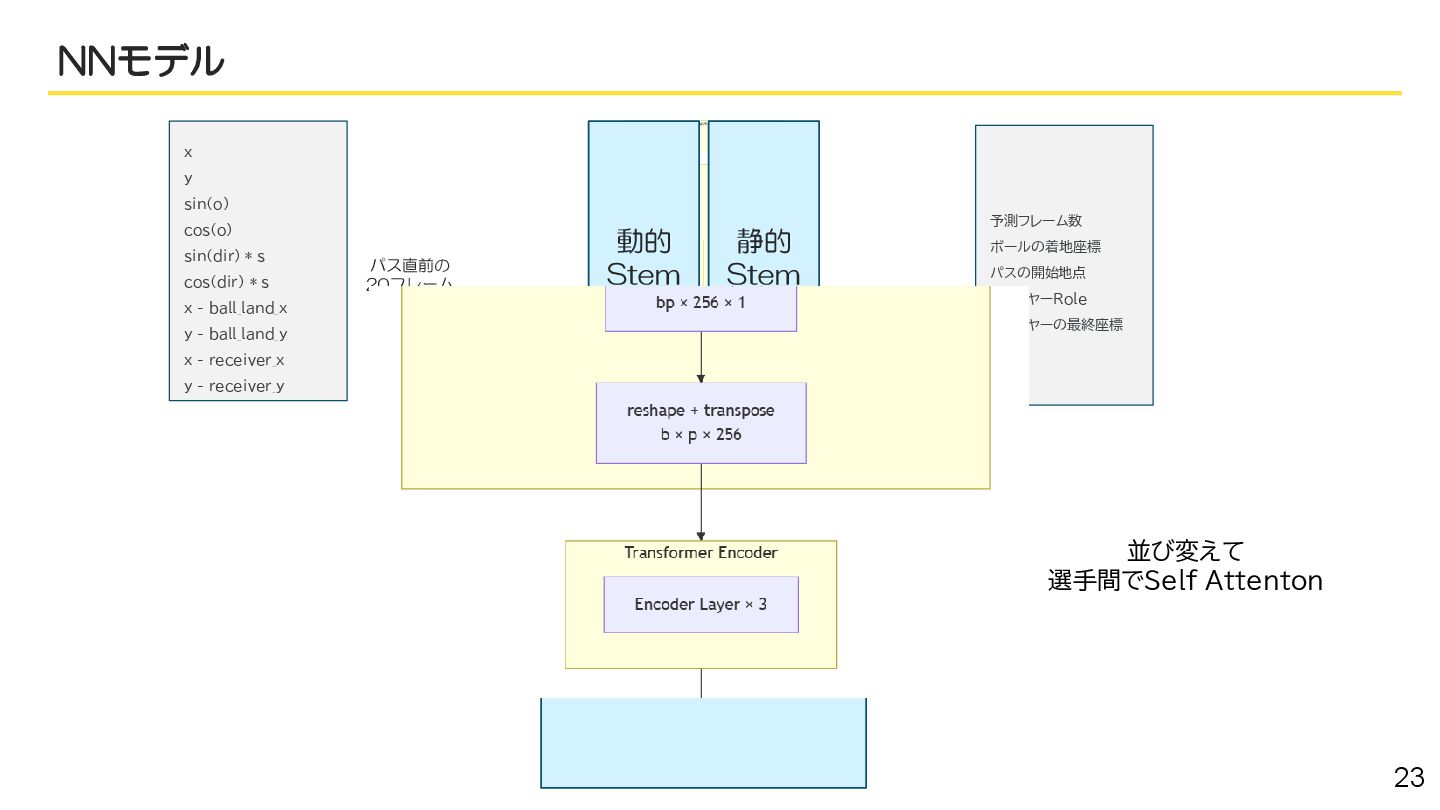
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標 動的特徴と静的特徴を結合 (ここでシーケンス長は1に固定)
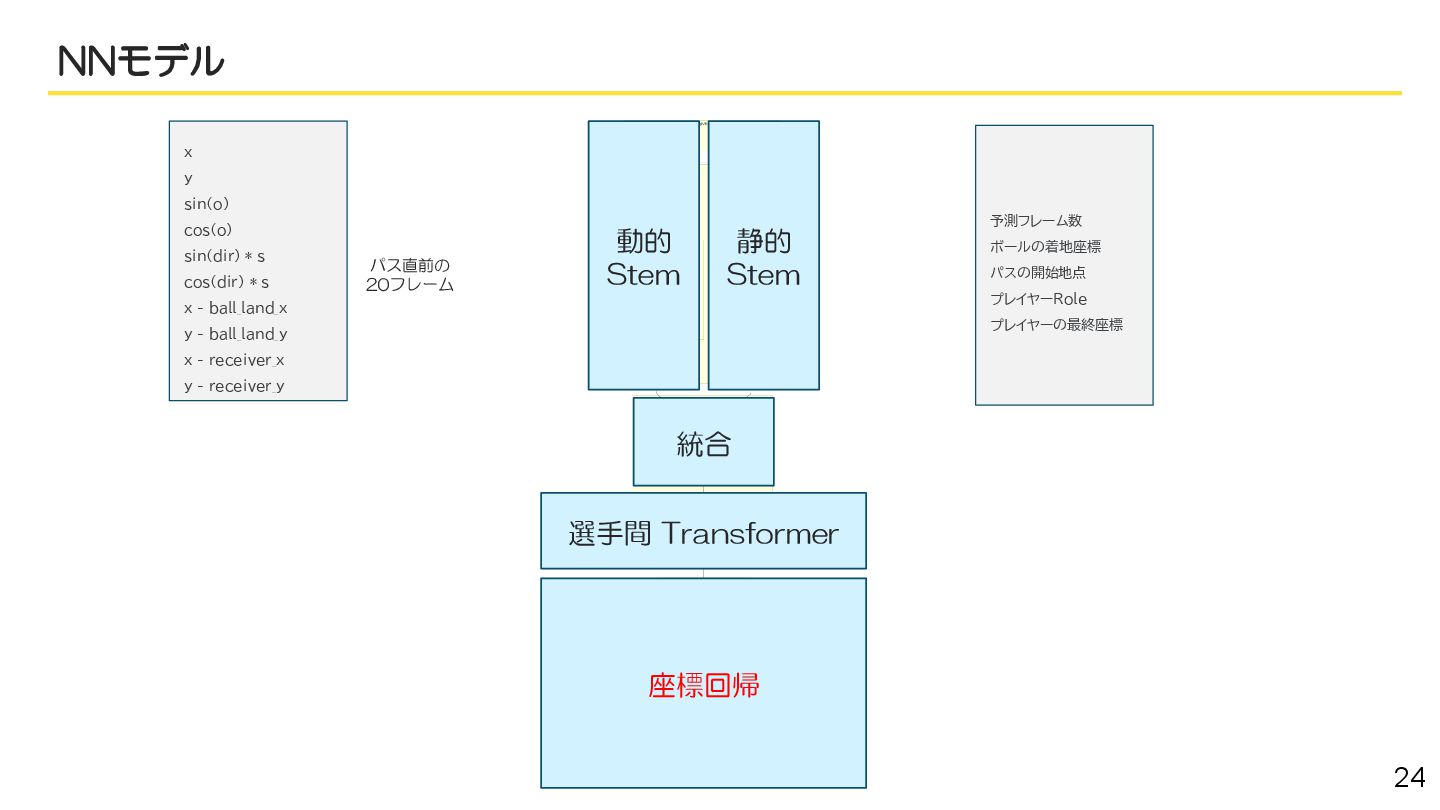
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標 並び変えて 選手間でSelf Attenton
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y パス直前の 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標
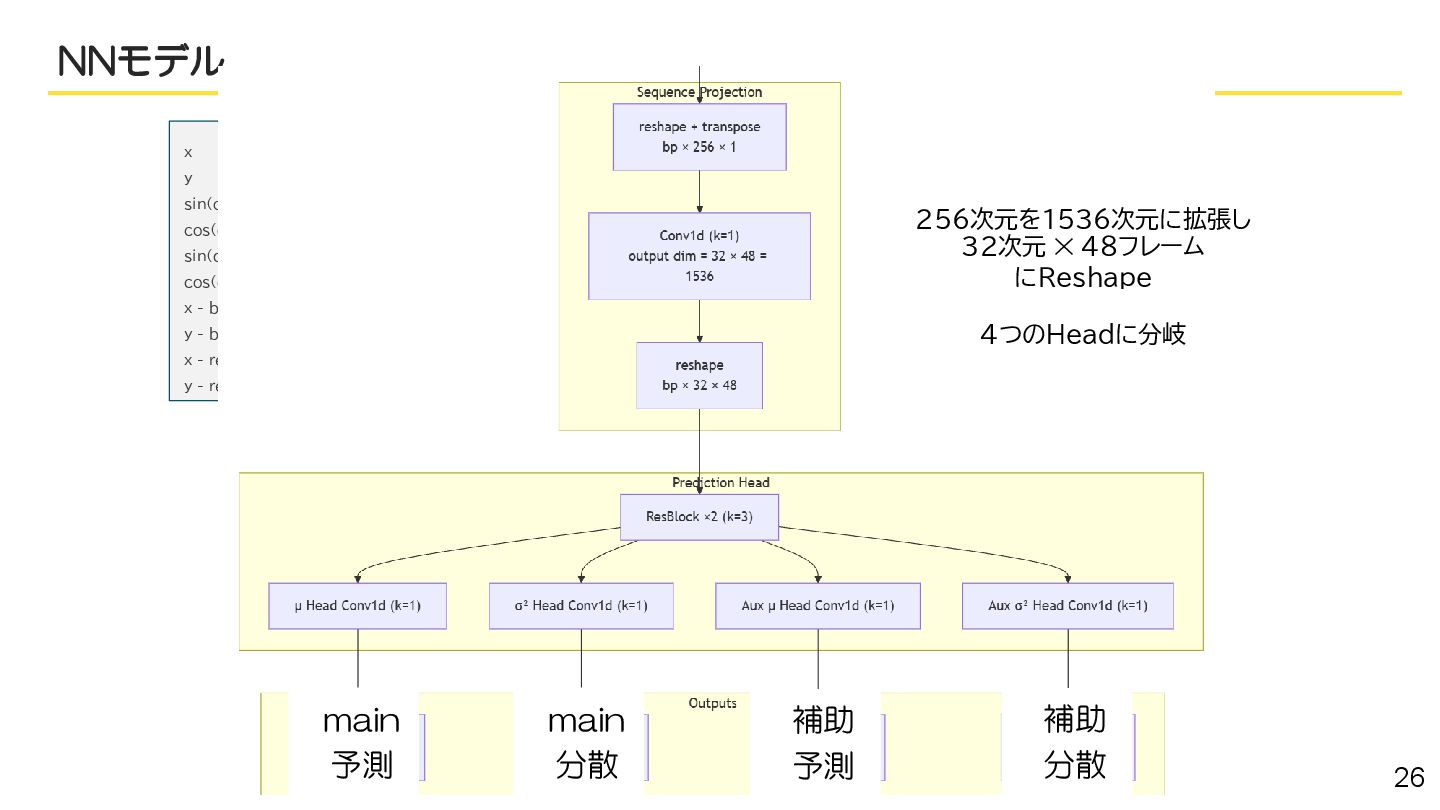
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y ✕ 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標 256次元を1536次元に拡張し 32次元 ✕ 48フレーム にReshape 4つのHeadに分岐
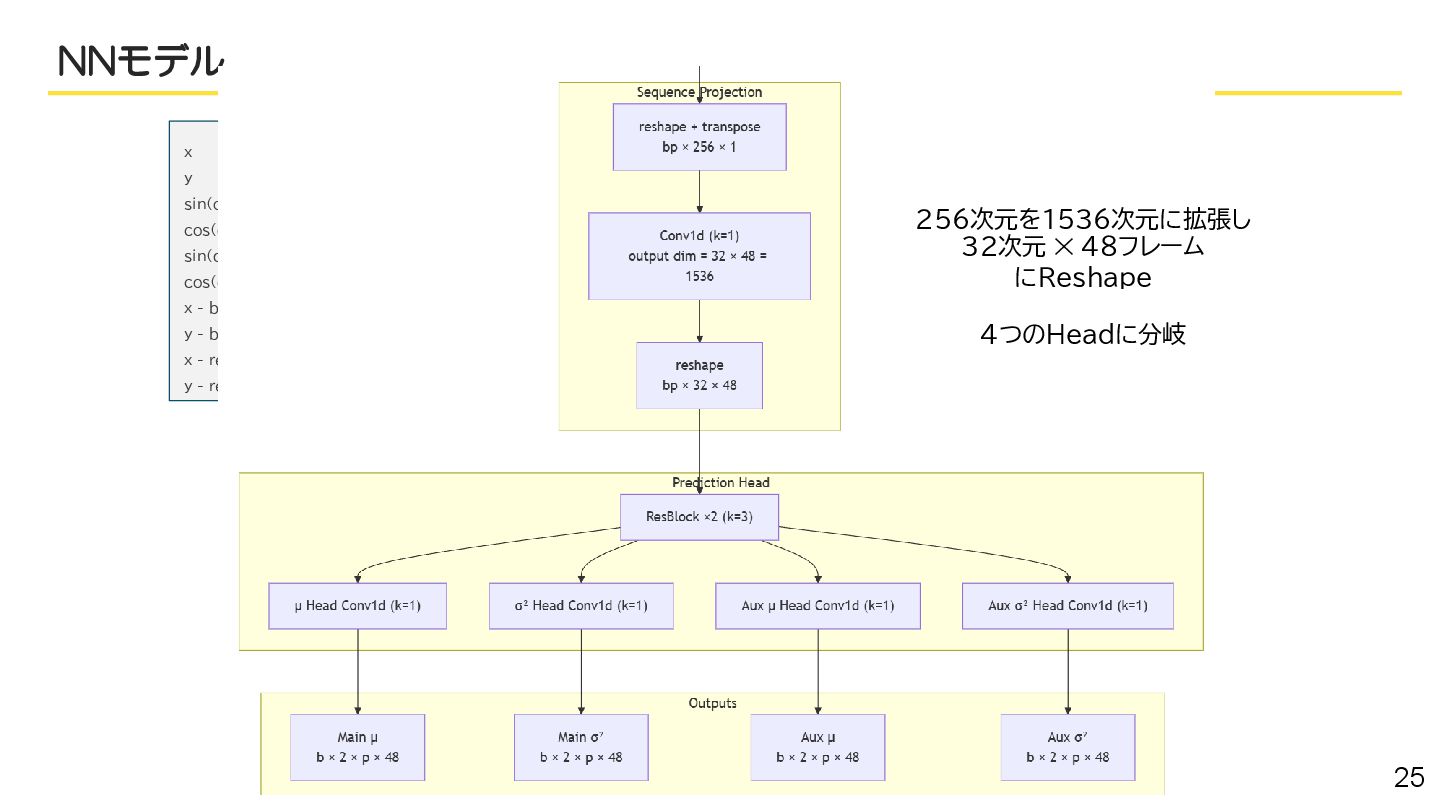
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y ✕ 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標 main 予測 main 分散 補助 予測 補助 分散 256次元を1536次元に拡張し 32次元 ✕ 48フレーム にReshape 4つのHeadに分岐
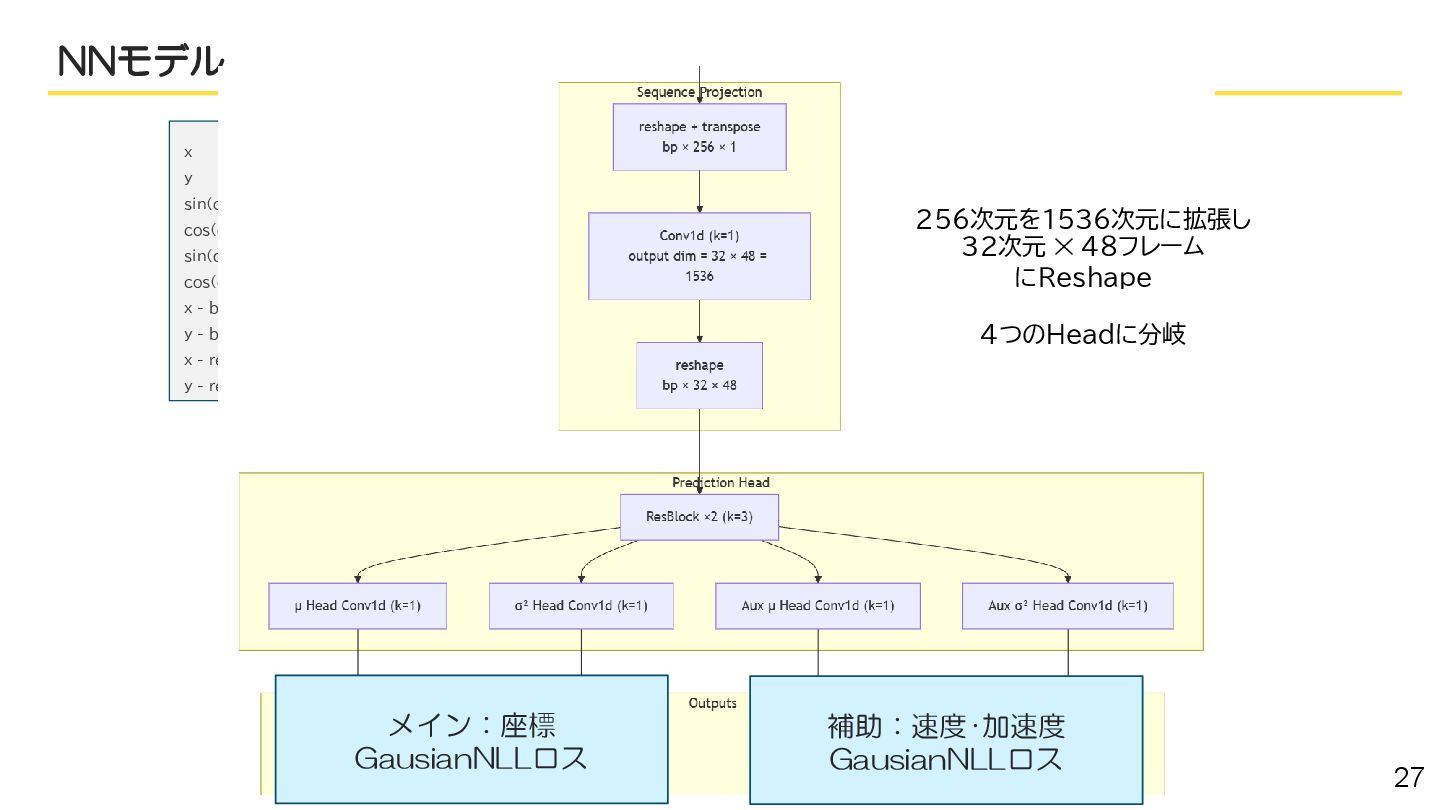
x y sin(o) cos(o) sin(dir) * s cos(dir) * s x - ball_land_x y - ball_land_y x - receiver_x y - receiver_y ✕ 20フレーム 予測フレーム数 ボールの着地座標 パスの開始地点 プレイヤーRole プレイヤーの最終座標 main 予測 main 分散 補助 予測 補助 分散 256次元を1536次元に拡張し 32次元 ✕ 48フレーム にReshape 4つのHeadに分岐 メイン:座標 GausianNLLロス 補助:速度・加速度 GausianNLLロス
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}