2026/02/08 関東CV勉強会の資料です。
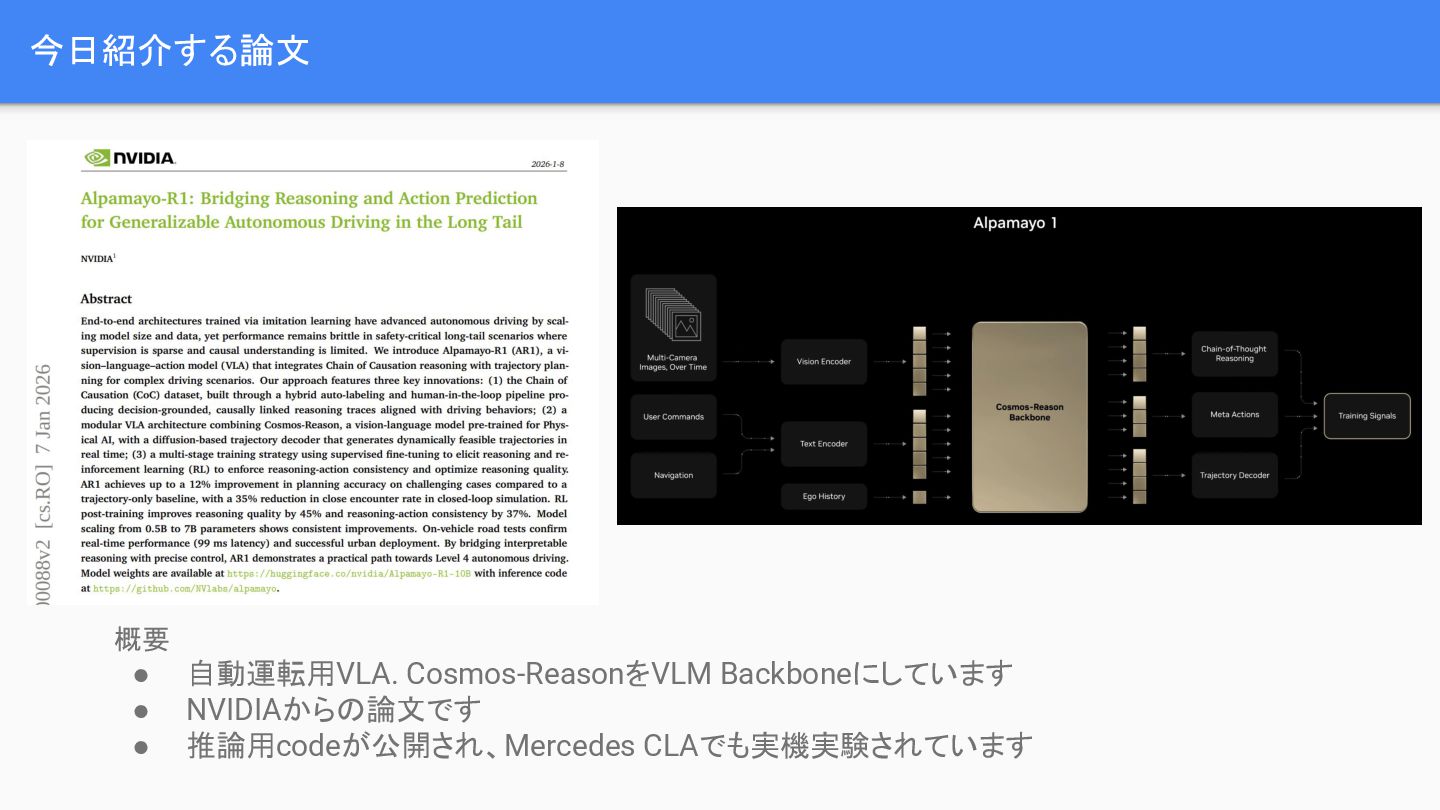
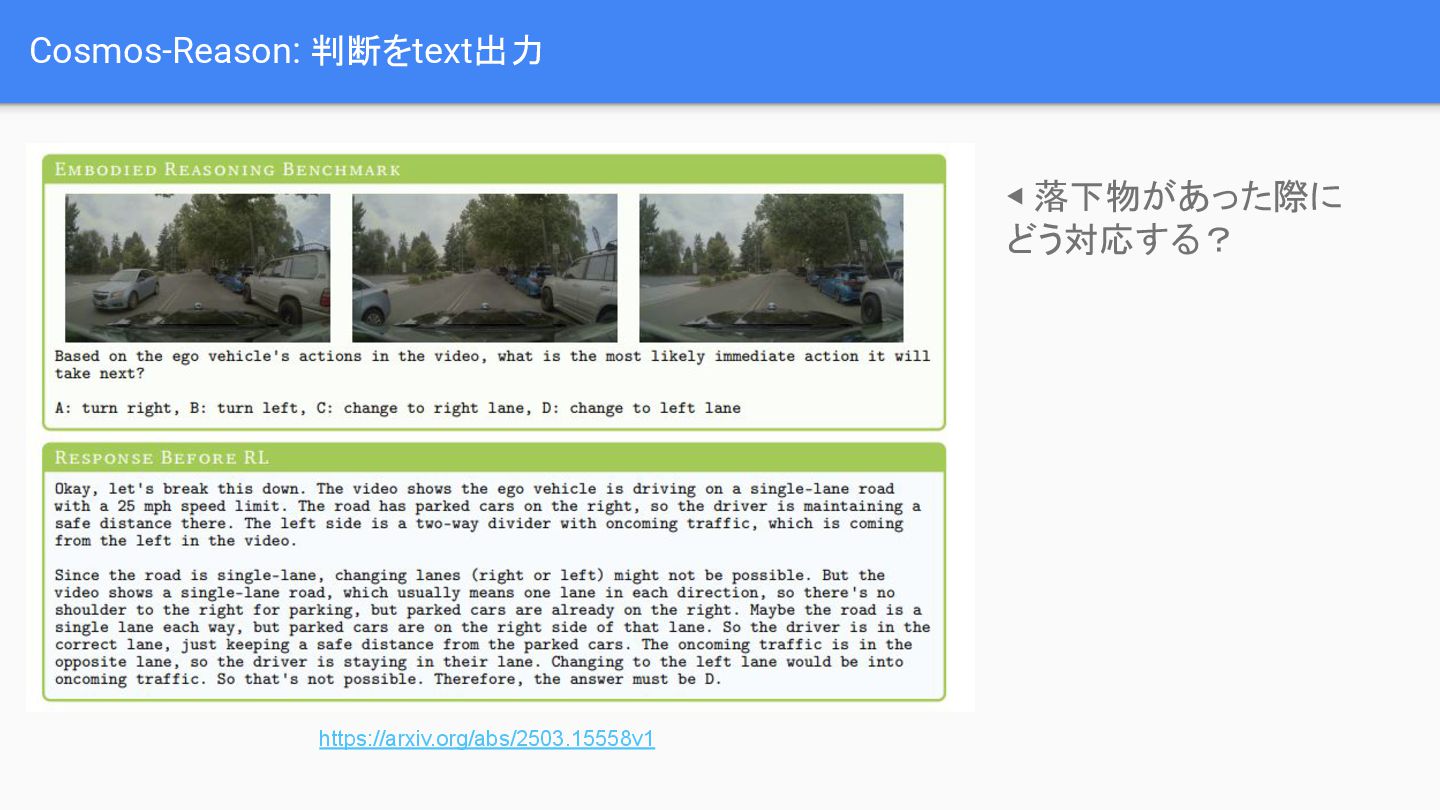
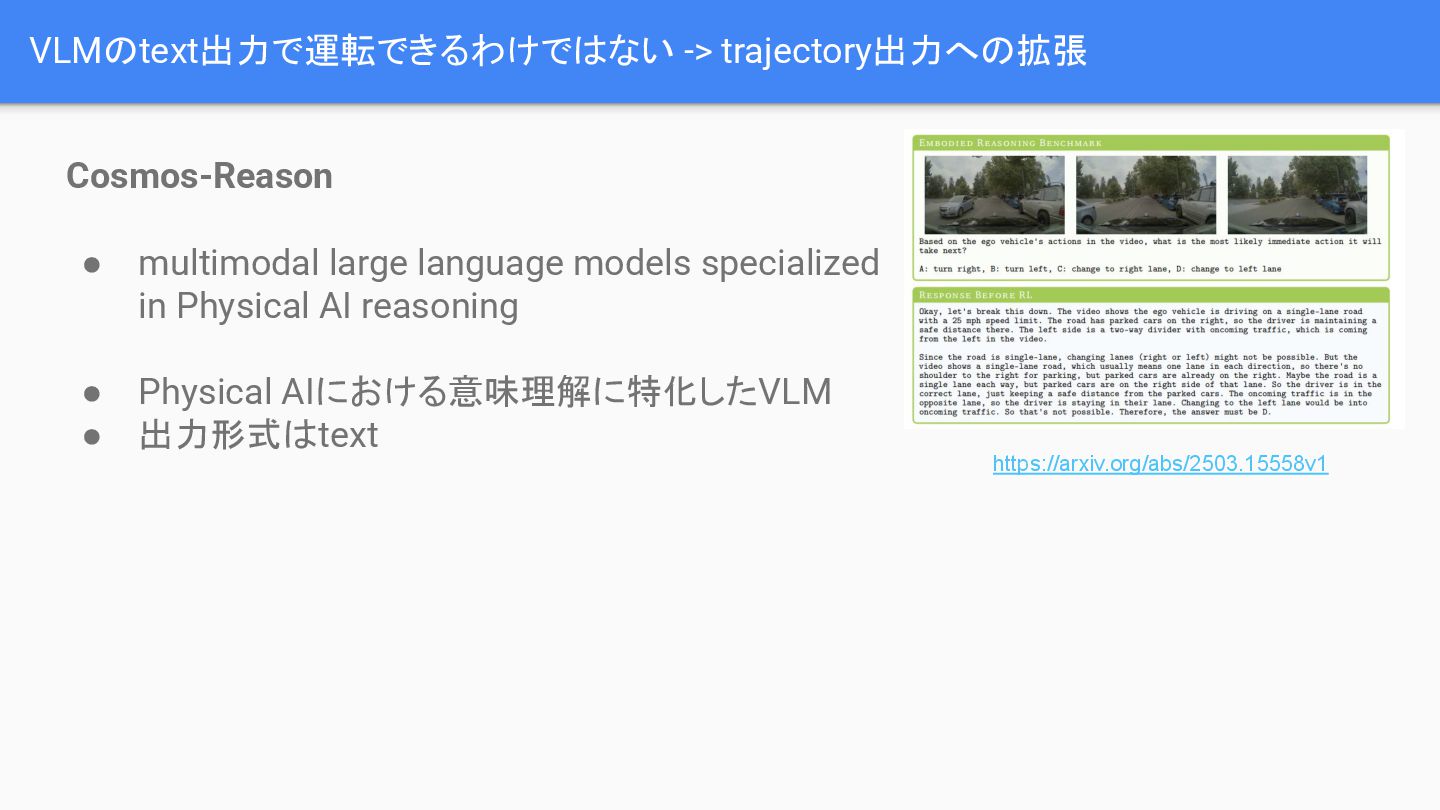
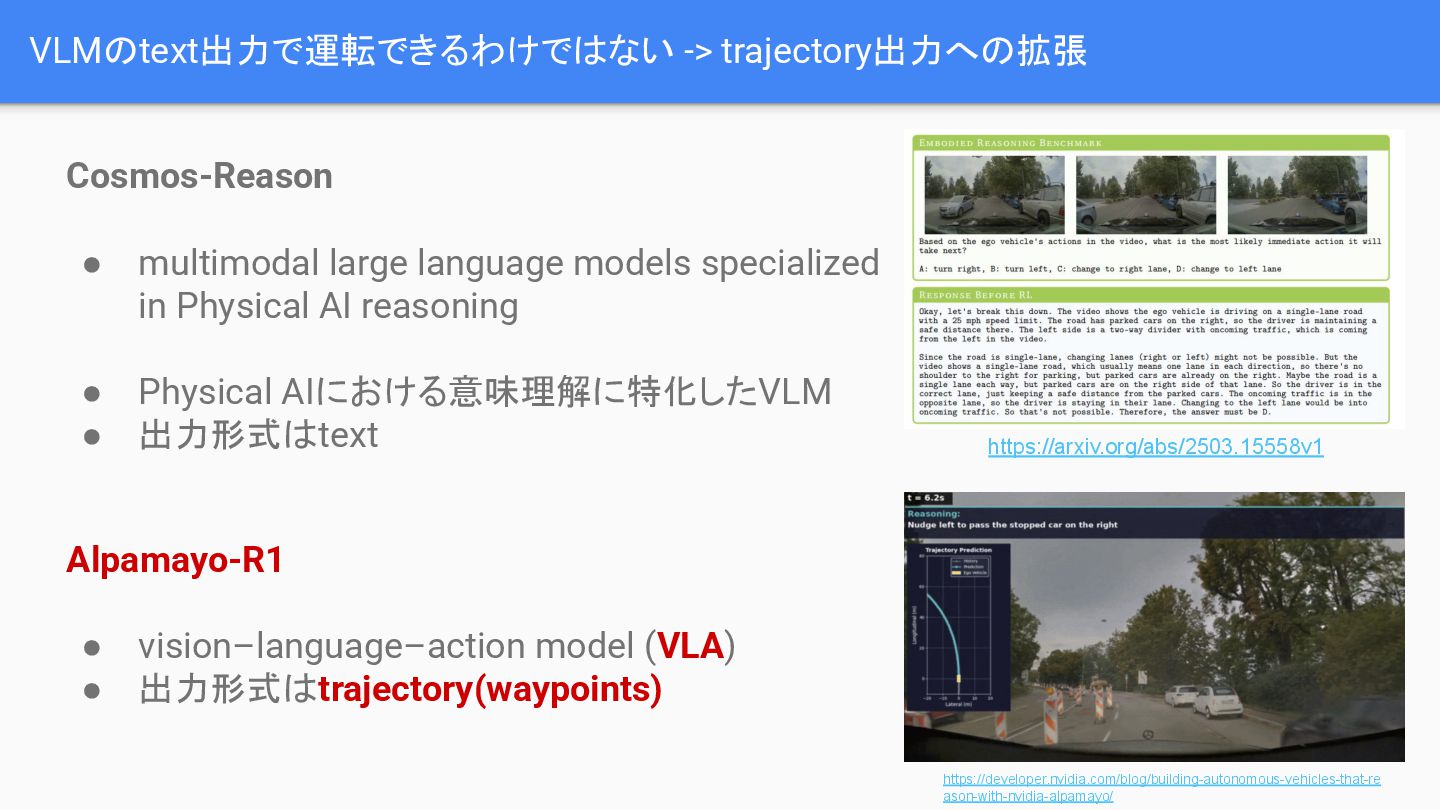
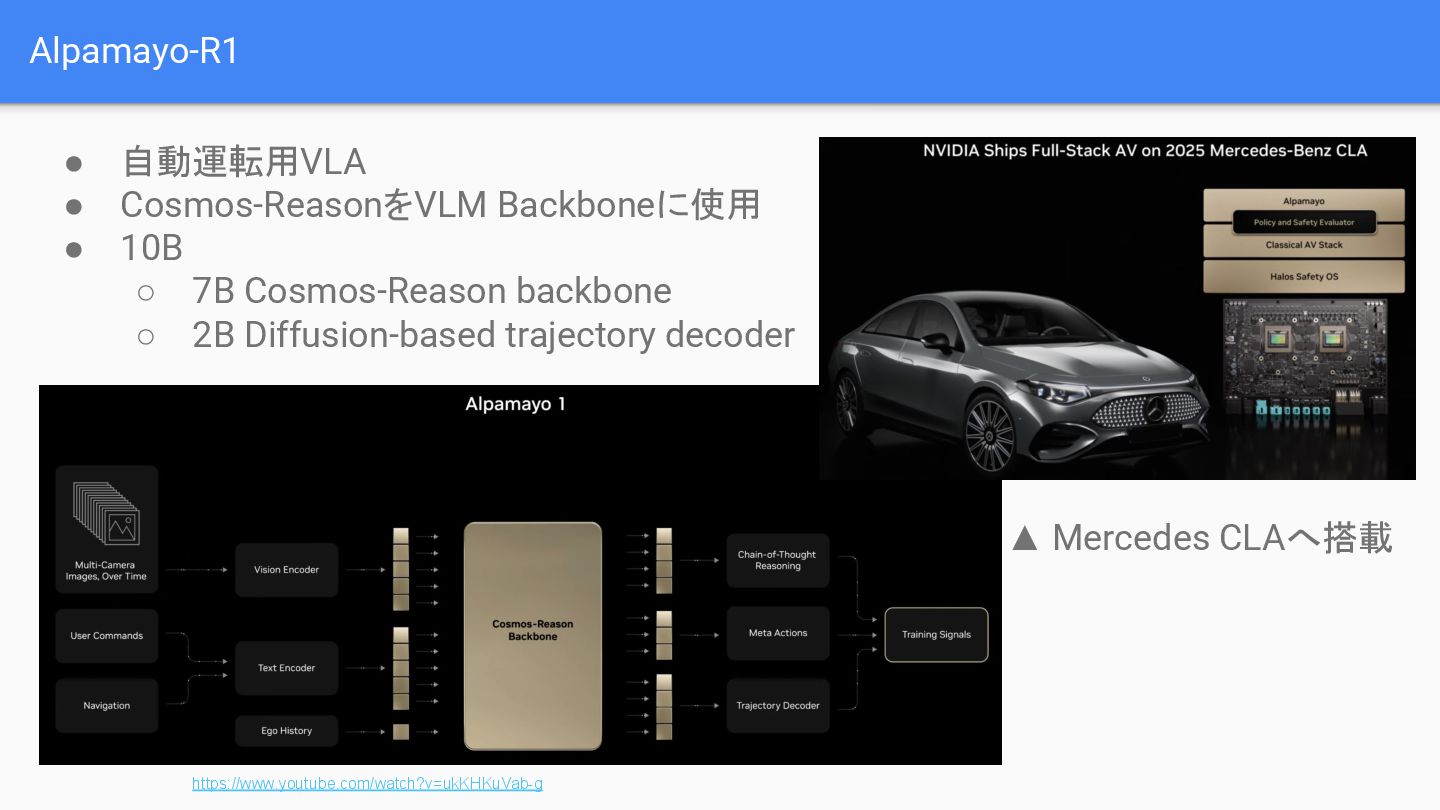
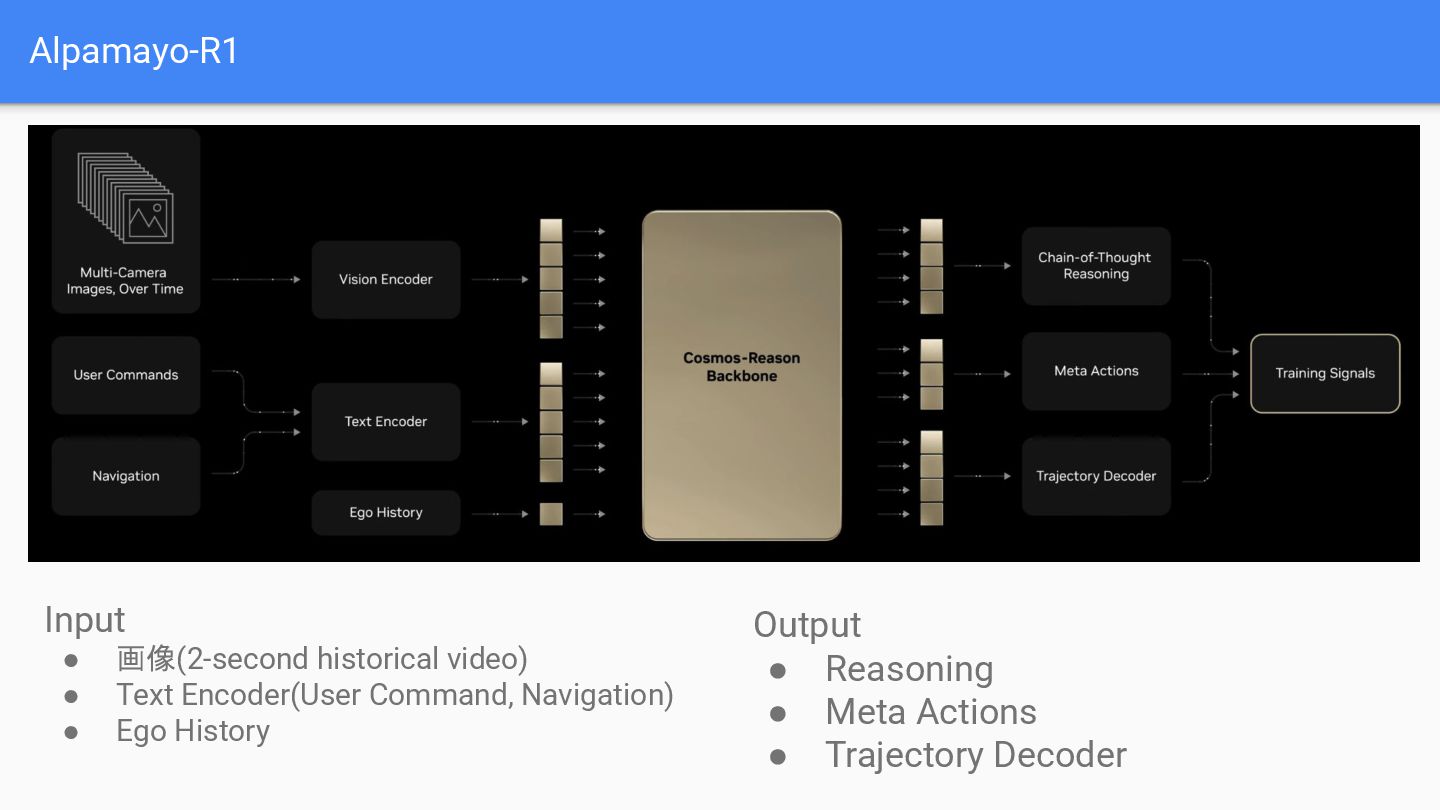
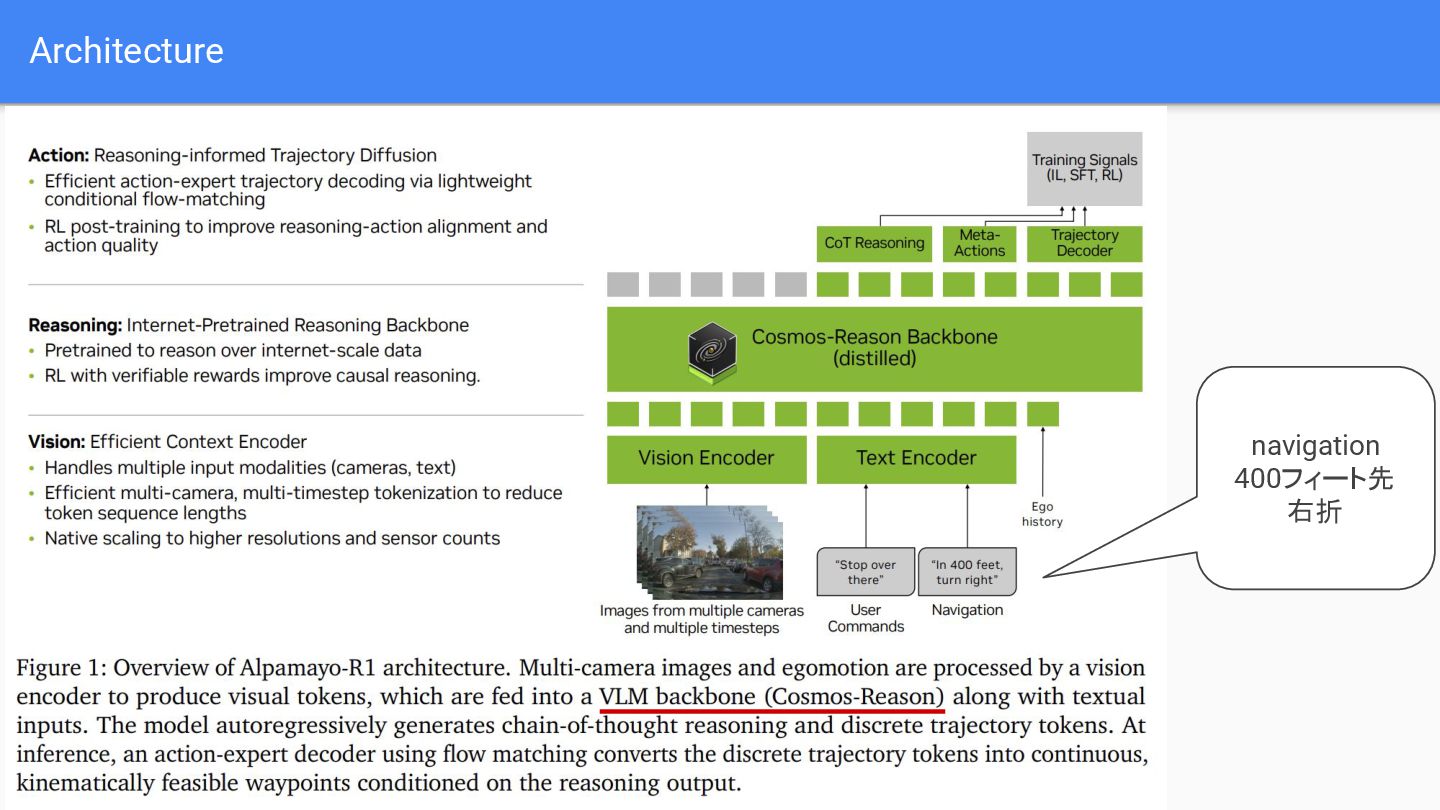
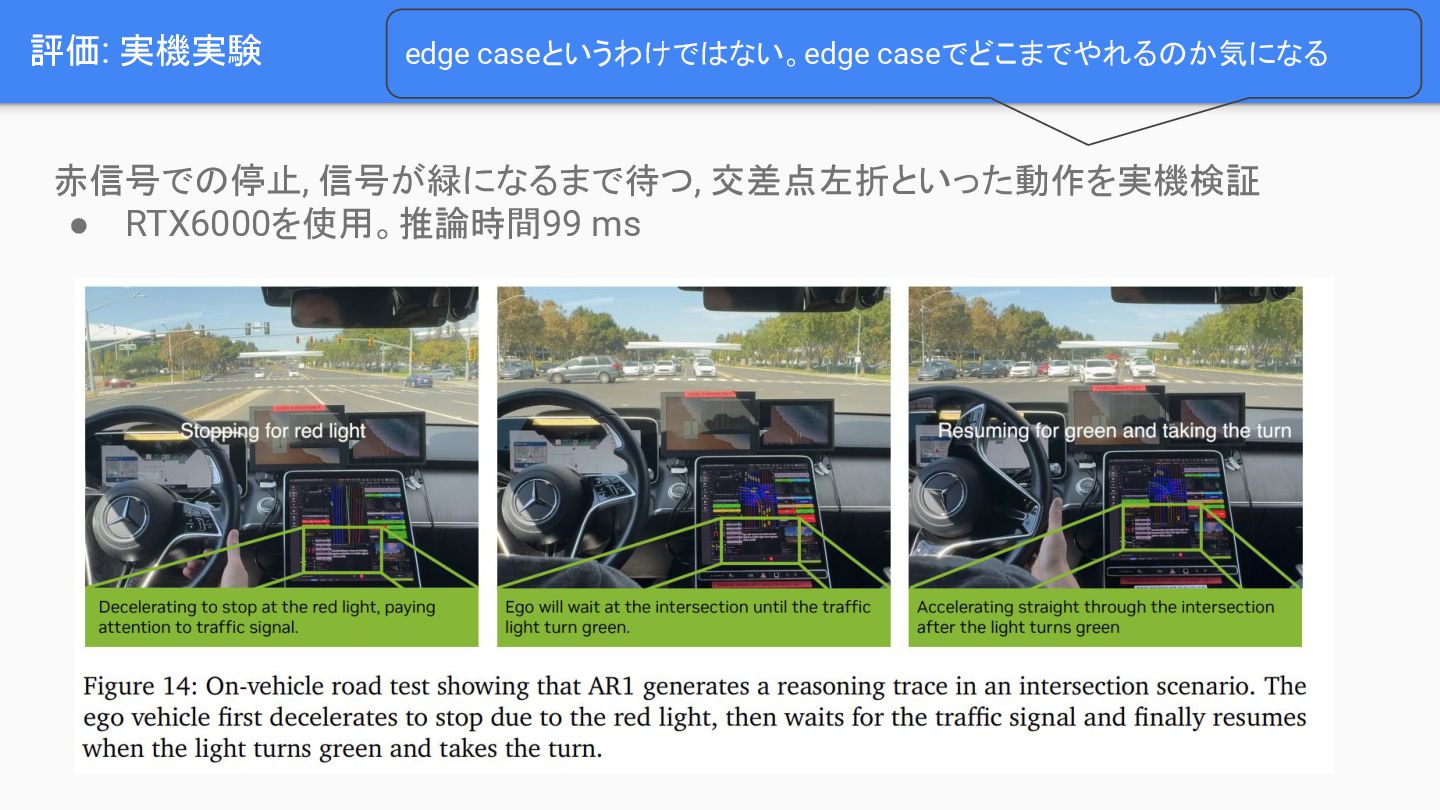
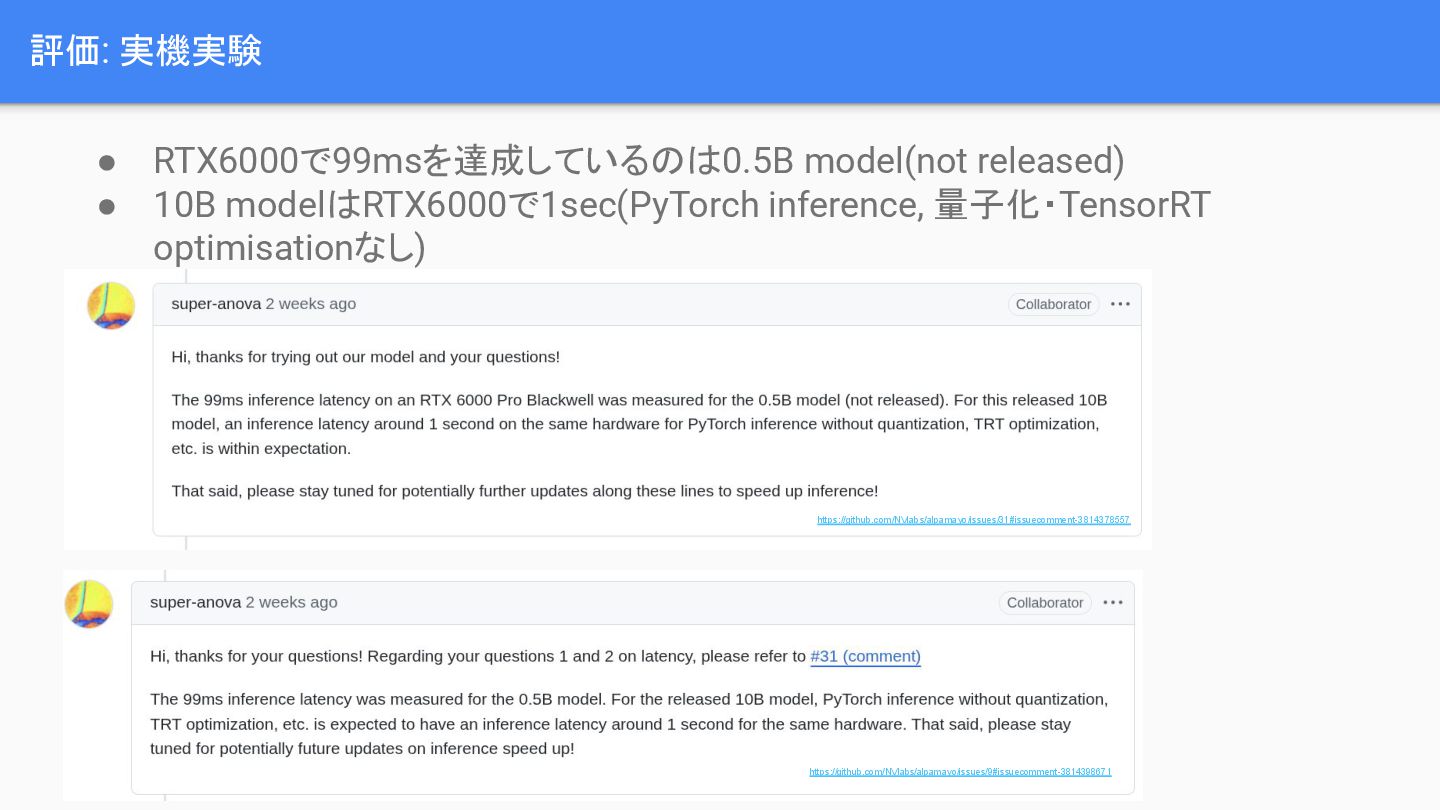
Cosmos-Reasonをbackboneとして用いるVLA自動運転モデルについての発表です。
arxiv: https://arxiv.org/abs/2511.00088
code: https://github.com/NVlabs/alpamayo
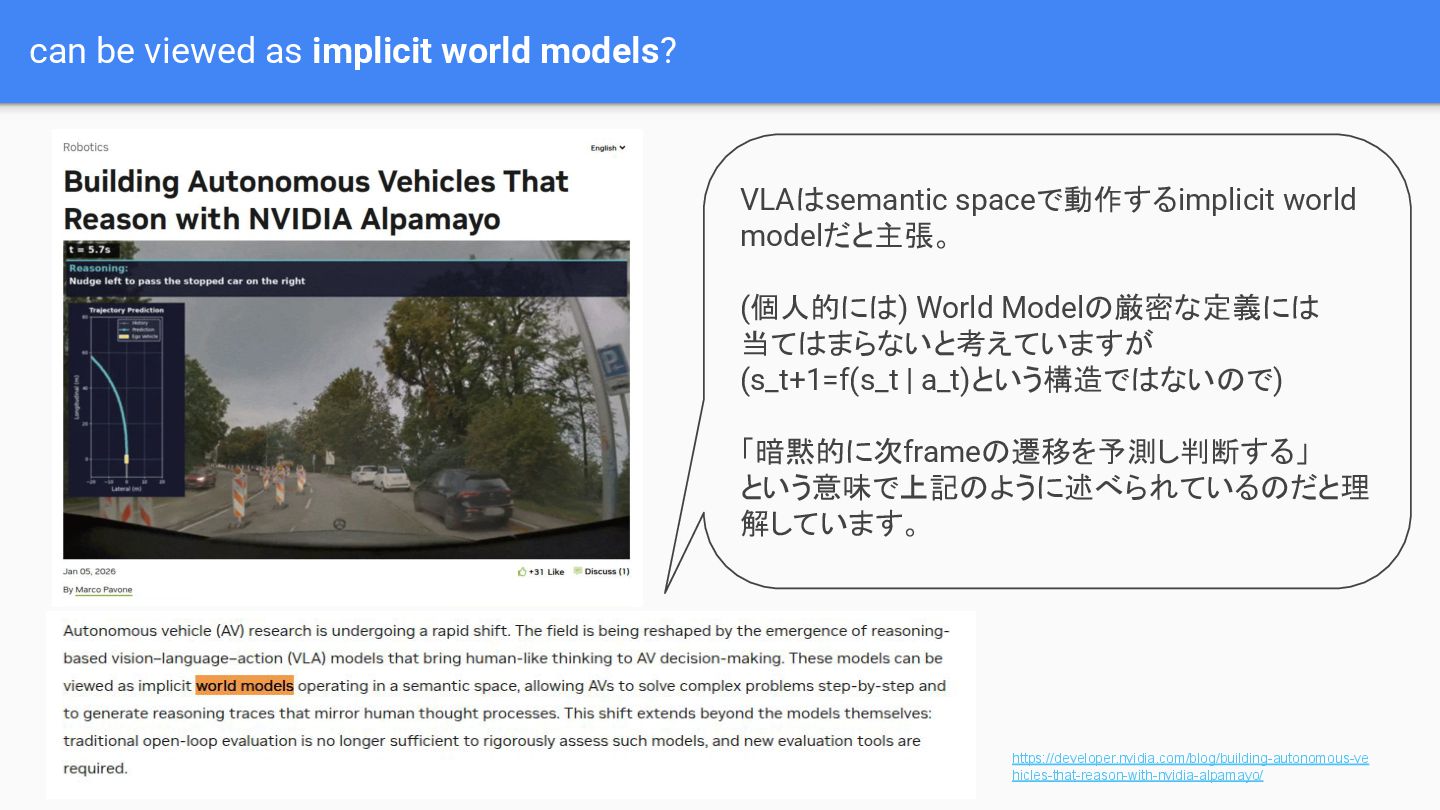
tech blog: https://developer.nvidia.com/blog/building-autonomous-vehicles-that-reason-with-nvidia-alpamayo
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}