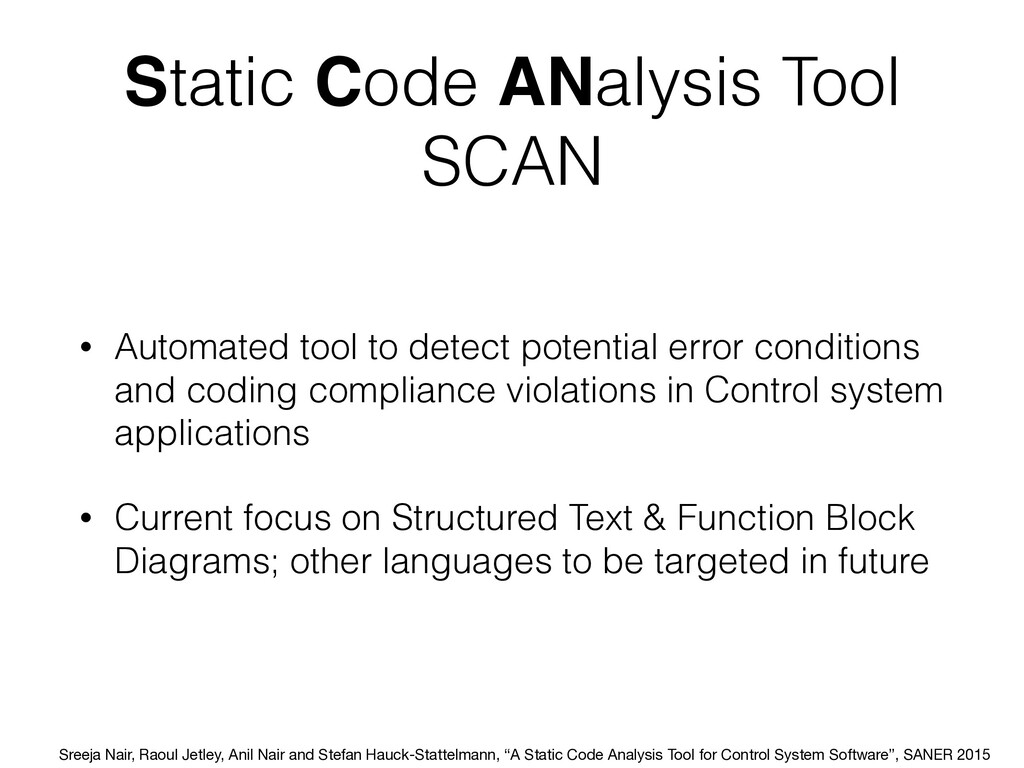
potential error conditions and coding compliance violations in Control system applications • Current focus on Structured Text & Function Block Diagrams; other languages to be targeted in future Sreeja Nair, Raoul Jetley, Anil Nair and Stefan Hauck-Stattelmann, “A Static Code Analysis Tool for Control System Software”, SANER 2015
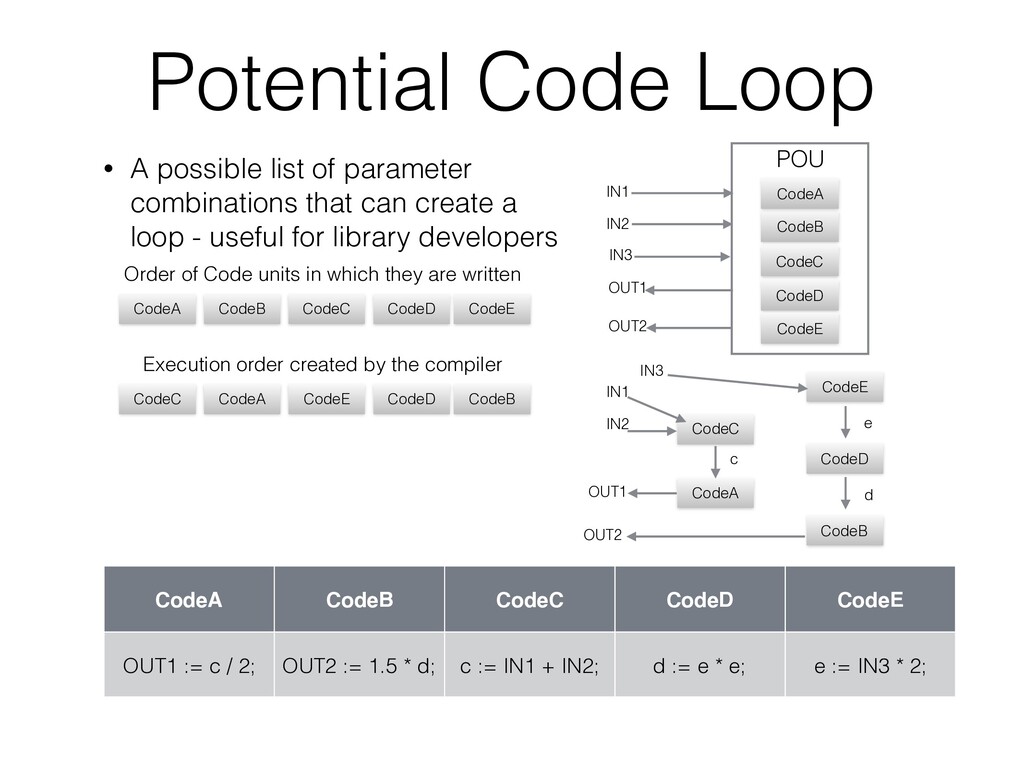
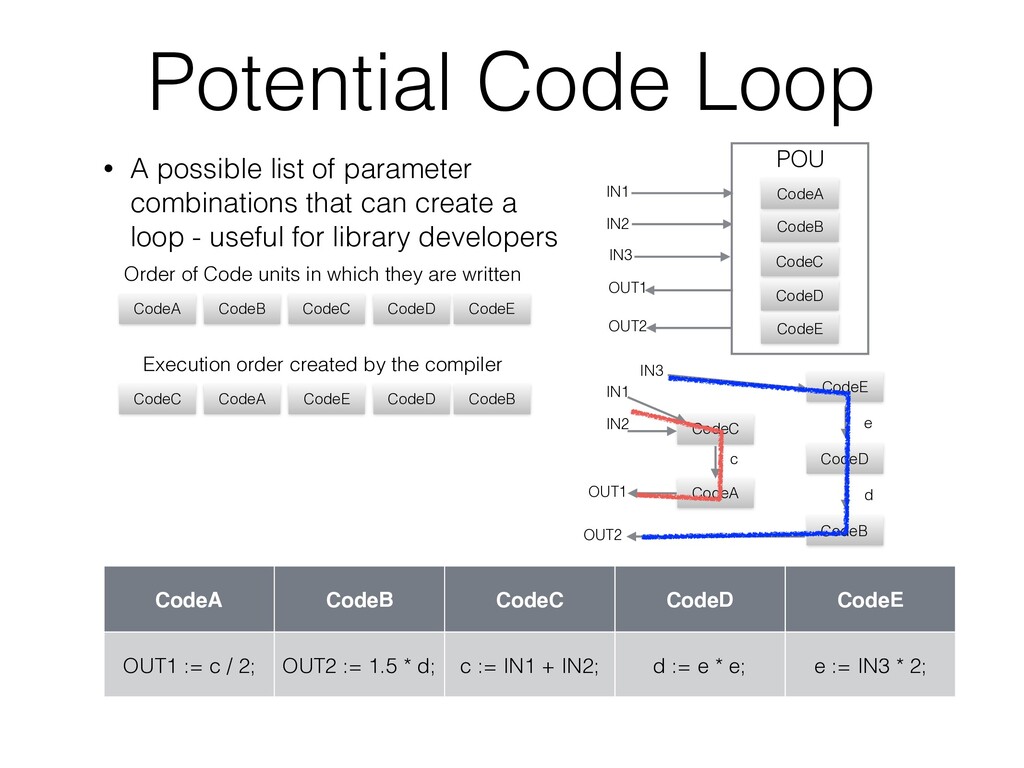
that can create a loop - useful for library developers CodeA CodeB CodeC CodeD CodeE OUT1 := c / 2; OUT2 := 1.5 * d; c := IN1 + IN2; d := e * e; e := IN3 * 2; CodeC CodeB CodeA CodeD CodeE OUT1 IN2 IN1 IN3 OUT2 POU CodeC CodeB CodeA CodeD CodeE Order of Code units in which they are written CodeE CodeA CodeC CodeD CodeB Execution order created by the compiler CodeE CodeA CodeC CodeD CodeB OUT1 IN2 IN1 IN3 OUT2 c e d
that can create a loop - useful for library developers CodeA CodeB CodeC CodeD CodeE OUT1 := c / 2; OUT2 := 1.5 * d; c := IN1 + IN2; d := e * e; e := IN3 * 2; CodeC CodeB CodeA CodeD CodeE OUT1 IN2 IN1 IN3 OUT2 POU CodeC CodeB CodeA CodeD CodeE Order of Code units in which they are written CodeE CodeA CodeC CodeD CodeB Execution order created by the compiler CodeE CodeA CodeC CodeD CodeB OUT1 IN2 IN1 IN3 OUT2 c e d
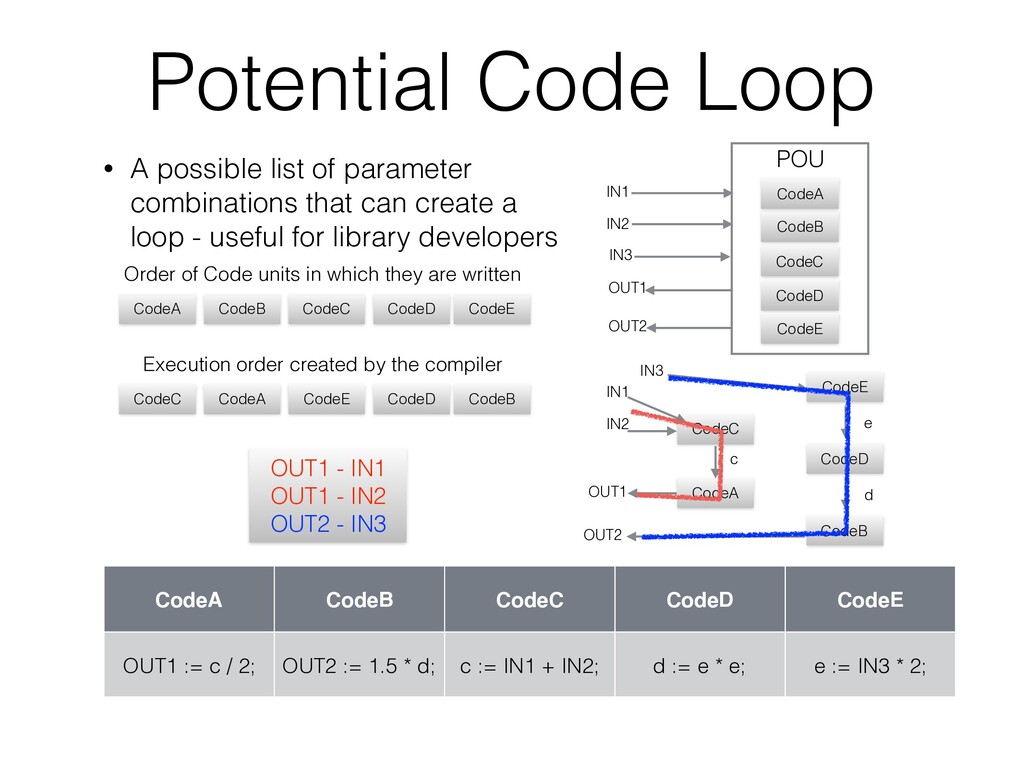
that can create a loop - useful for library developers CodeA CodeB CodeC CodeD CodeE OUT1 := c / 2; OUT2 := 1.5 * d; c := IN1 + IN2; d := e * e; e := IN3 * 2; OUT1 - IN1 OUT1 - IN2 OUT2 - IN3 CodeC CodeB CodeA CodeD CodeE OUT1 IN2 IN1 IN3 OUT2 POU CodeC CodeB CodeA CodeD CodeE Order of Code units in which they are written CodeE CodeA CodeC CodeD CodeB Execution order created by the compiler CodeE CodeA CodeC CodeD CodeB OUT1 IN2 IN1 IN3 OUT2 c e d
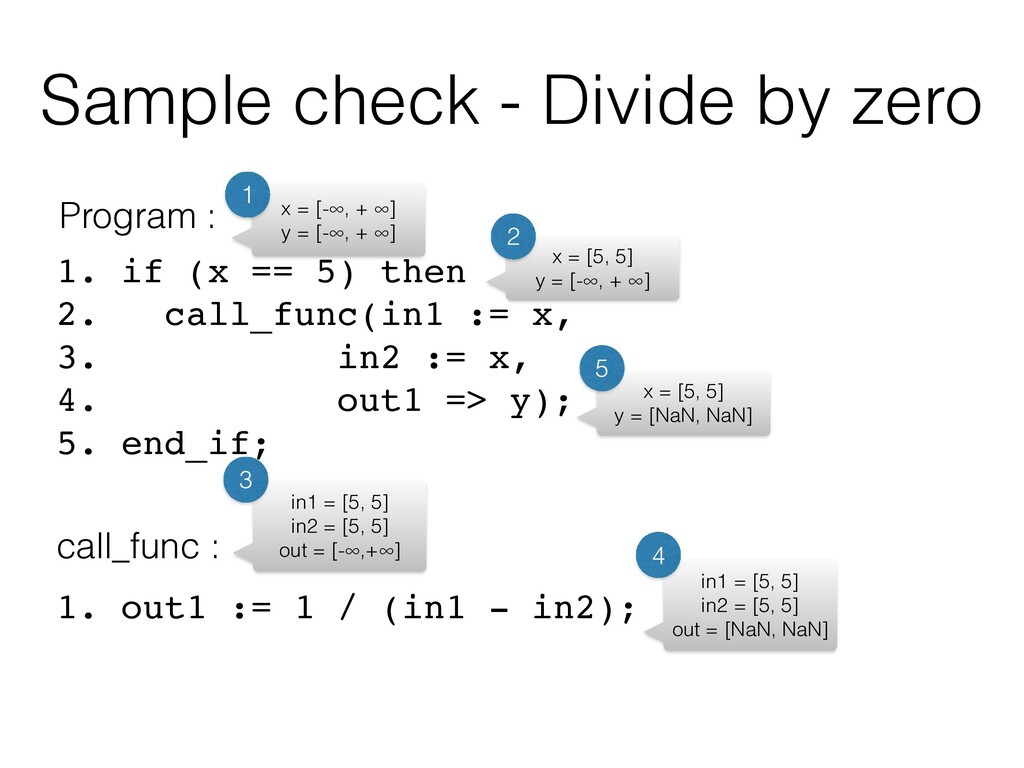
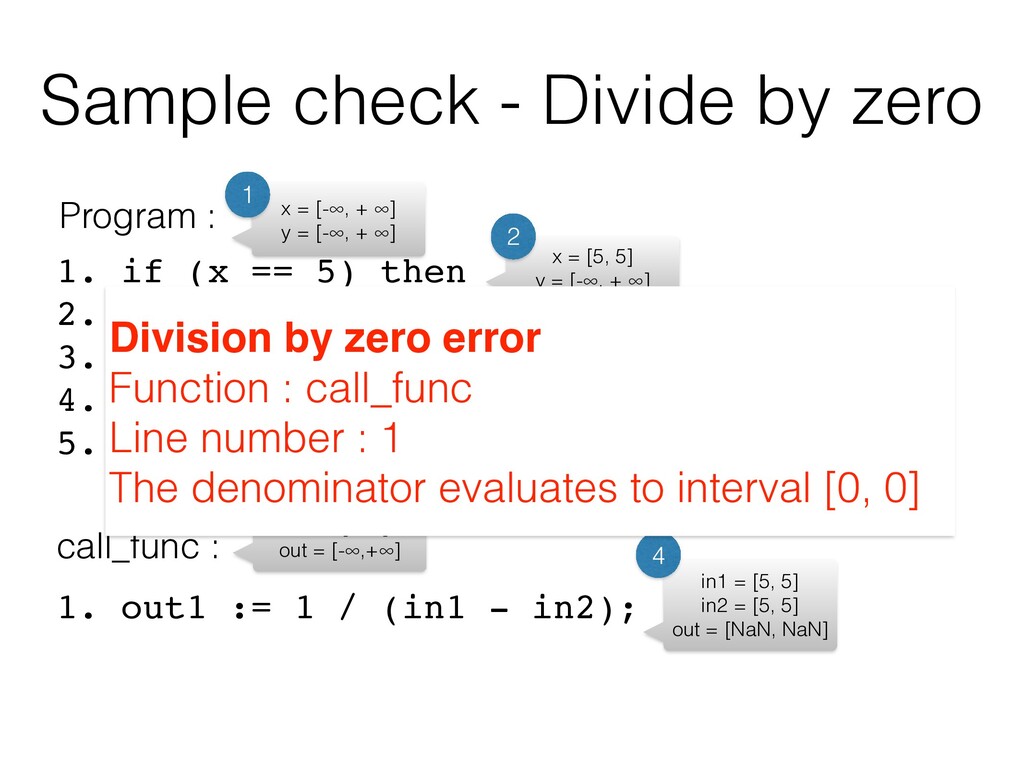
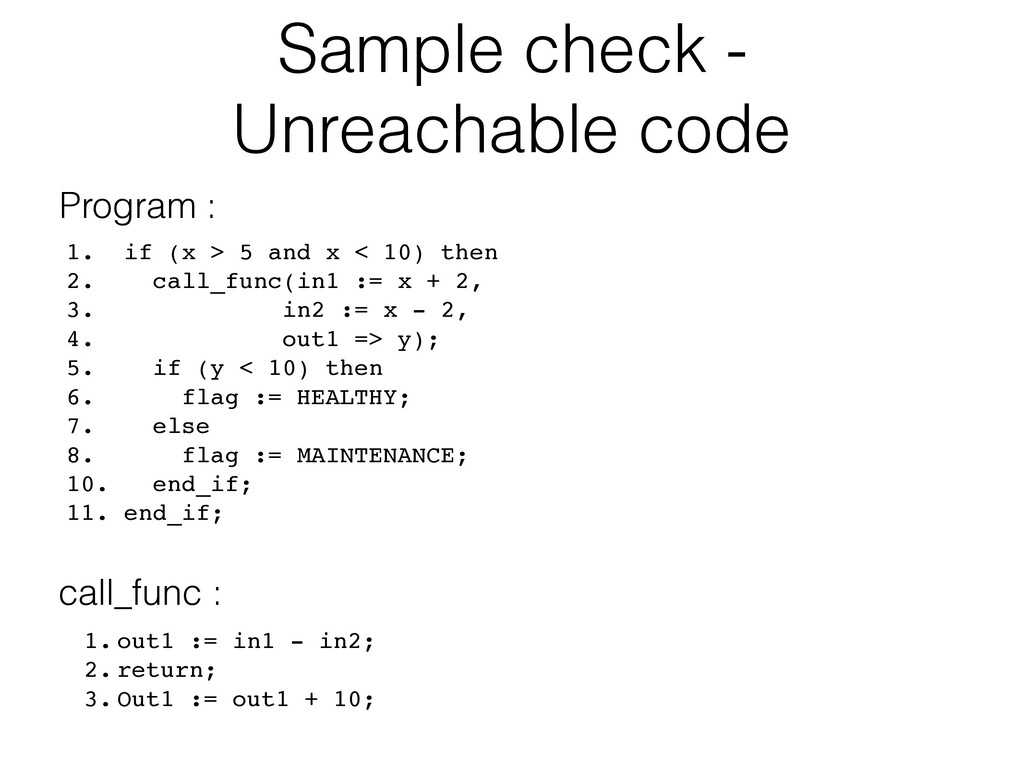
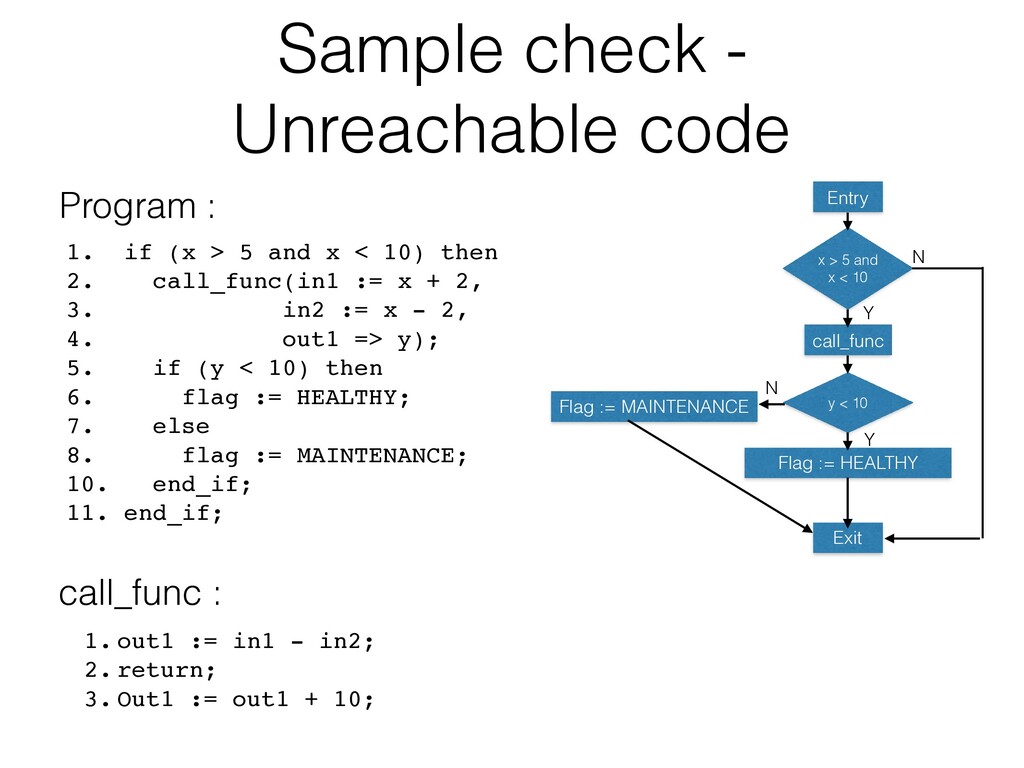
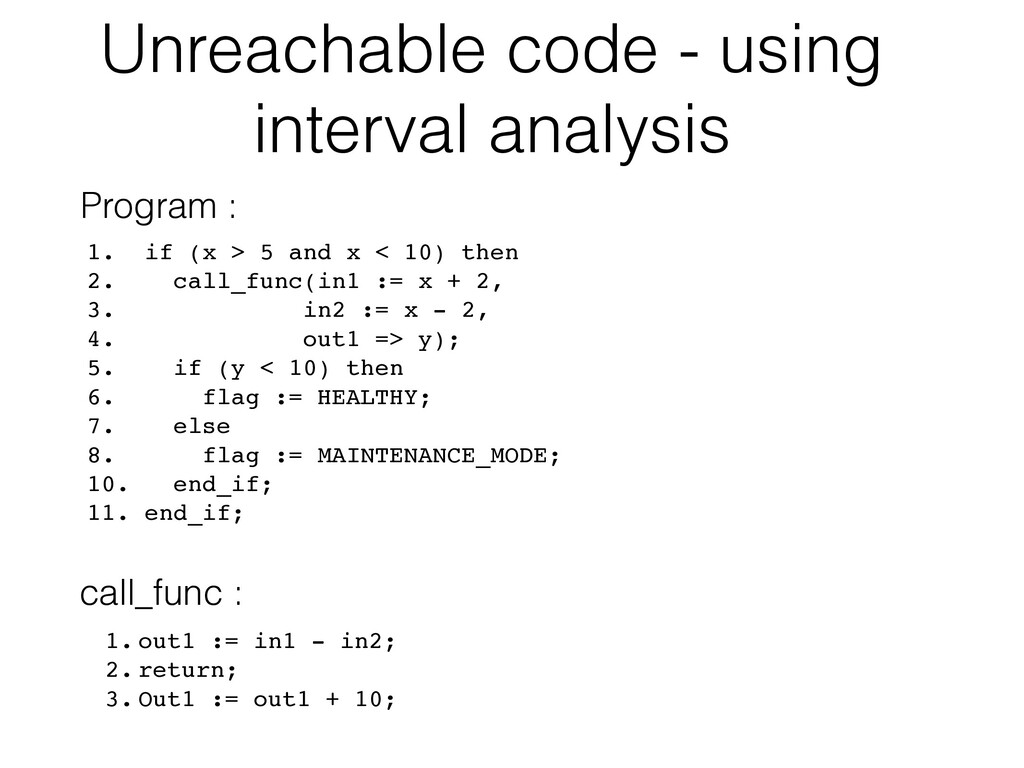
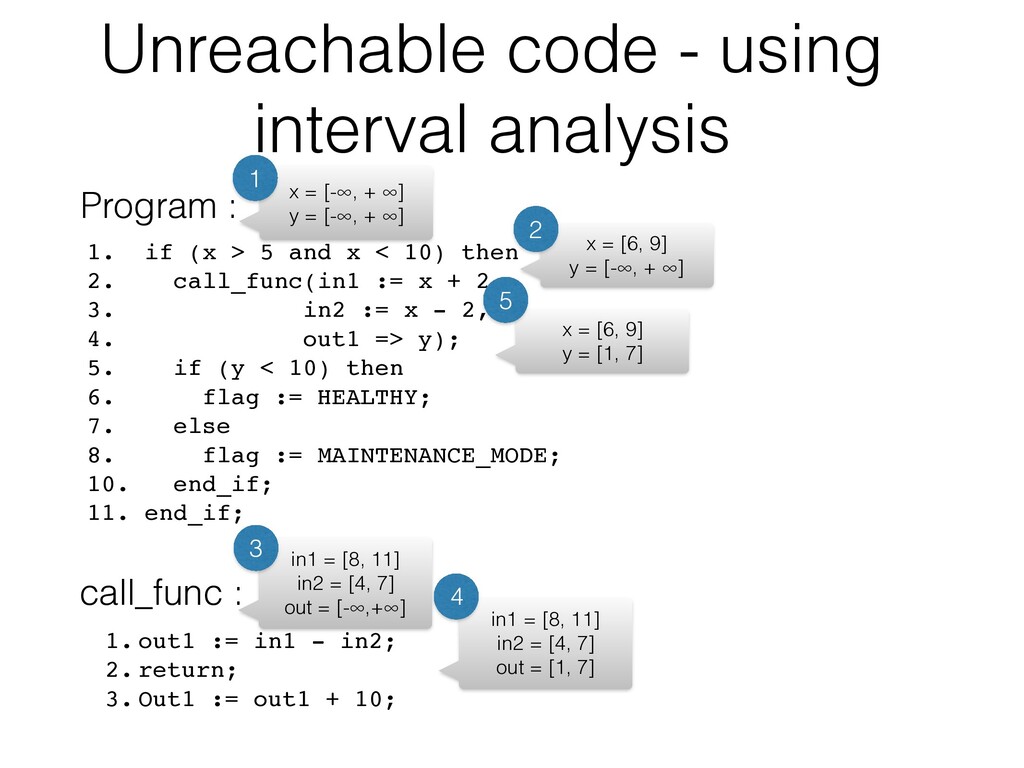
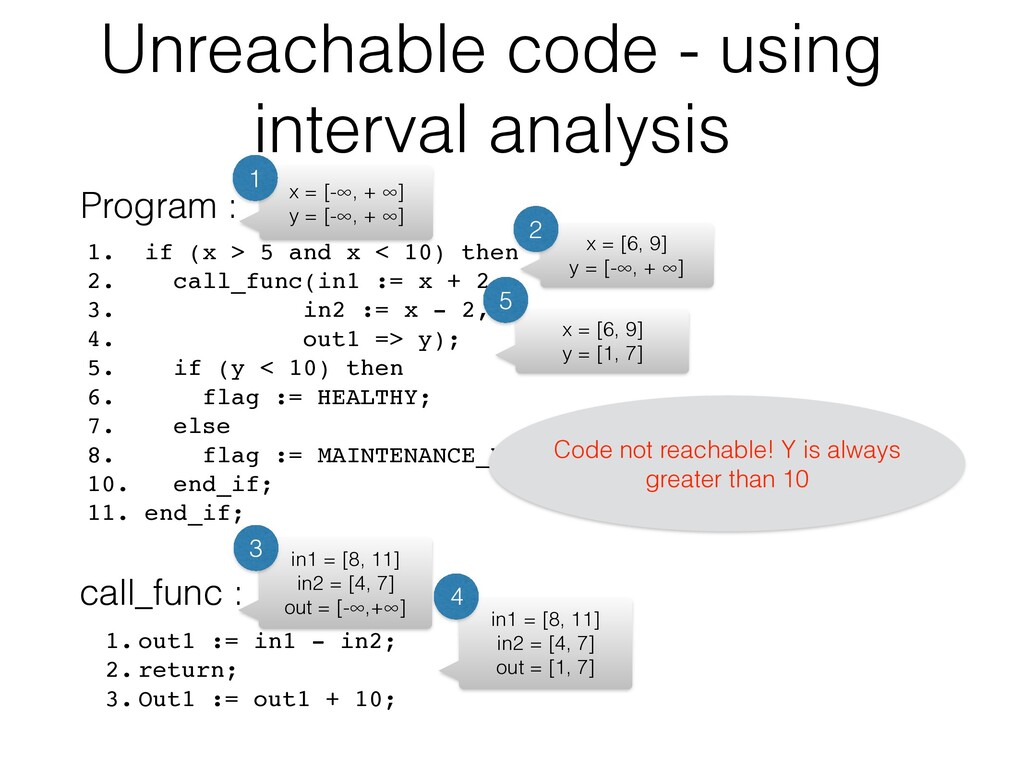
and x < 10) then 2. call_func(in1 := x + 2, 3. in2 := x - 2, 4. out1 => y); 5. if (y < 10) then 6. flag := HEALTHY; 7. else 8. flag := MAINTENANCE; 10. end_if; 11. end_if; 1. out1 := in1 - in2; 2. return; 3. Out1 := out1 + 10; Program : call_func : Entry x > 5 and x < 10 Exit call_func y < 10 Flag := HEALTHY Flag := MAINTENANCE Y Y N N
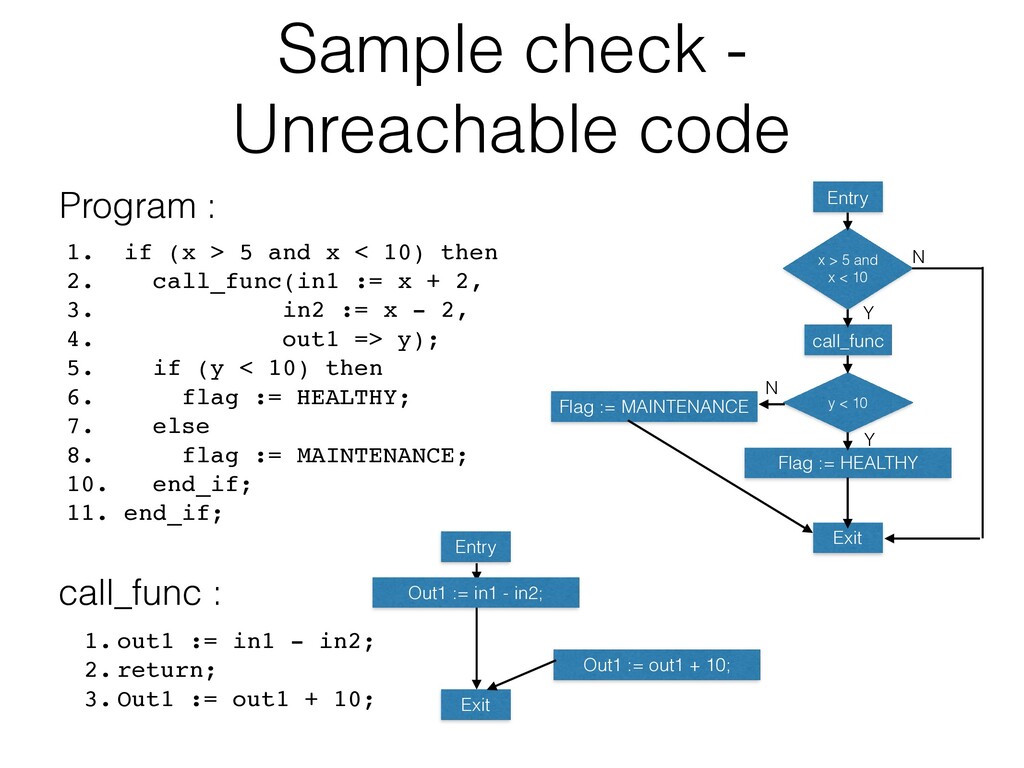
and x < 10) then 2. call_func(in1 := x + 2, 3. in2 := x - 2, 4. out1 => y); 5. if (y < 10) then 6. flag := HEALTHY; 7. else 8. flag := MAINTENANCE; 10. end_if; 11. end_if; 1. out1 := in1 - in2; 2. return; 3. Out1 := out1 + 10; Program : call_func : Entry Exit Out1 := in1 - in2; Out1 := out1 + 10; Entry x > 5 and x < 10 Exit call_func y < 10 Flag := HEALTHY Flag := MAINTENANCE Y Y N N
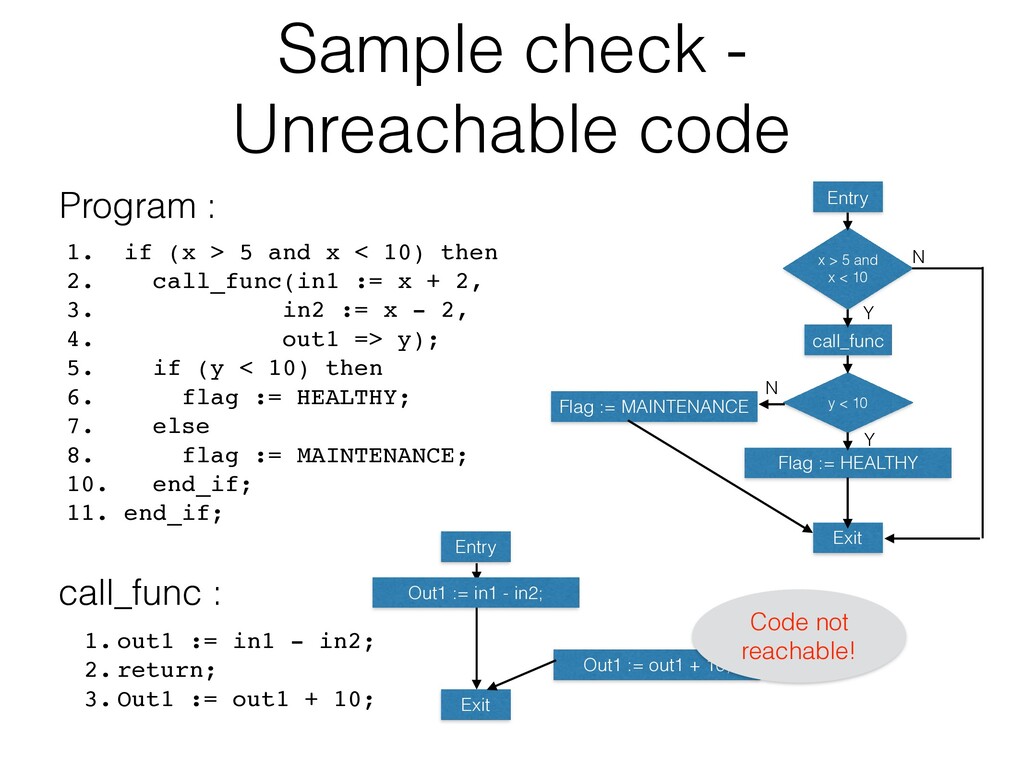
and x < 10) then 2. call_func(in1 := x + 2, 3. in2 := x - 2, 4. out1 => y); 5. if (y < 10) then 6. flag := HEALTHY; 7. else 8. flag := MAINTENANCE; 10. end_if; 11. end_if; 1. out1 := in1 - in2; 2. return; 3. Out1 := out1 + 10; Program : call_func : Entry Exit Out1 := in1 - in2; Out1 := out1 + 10; Entry x > 5 and x < 10 Exit call_func y < 10 Flag := HEALTHY Flag := MAINTENANCE Y Y N N Code not reachable!
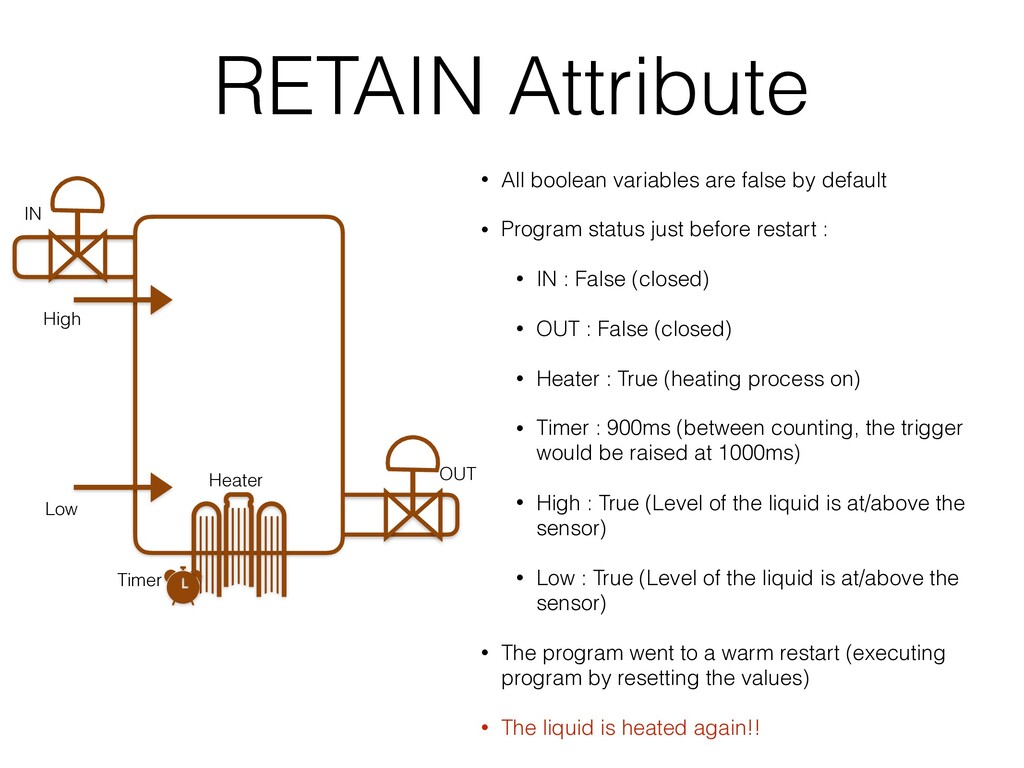
attributes • Sample attributes • RETAIN - retains value during warm restart, user-specified or default initial value during cold restart • The value is lost in the next cycle and in critical operations prove disastrous • No explicitly declared initial values AND no RETAIN attribute => warning!! • STATE - retains the value from the previous scan cycle • Creates two locations for a variable - for new and old values • Usage : variable:Old, variable:New • STATE attribute AND no usage of variable:Old => warning!!
• Program status just before restart : • IN : False (closed) • OUT : False (closed) • Heater : True (heating process on) • Timer : 900ms (between counting, the trigger would be raised at 1000ms) • High : True (Level of the liquid is at/above the sensor) • Low : True (Level of the liquid is at/above the sensor) • The program went to a warm restart (executing program by resetting the values) • The liquid is heated again!! IN OUT Heater Low High Timer
with variable specifications • Datatype analysis • AST annotated with datatype information • Data-flow analysis • Abstract interpretation performed with interval domain
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}