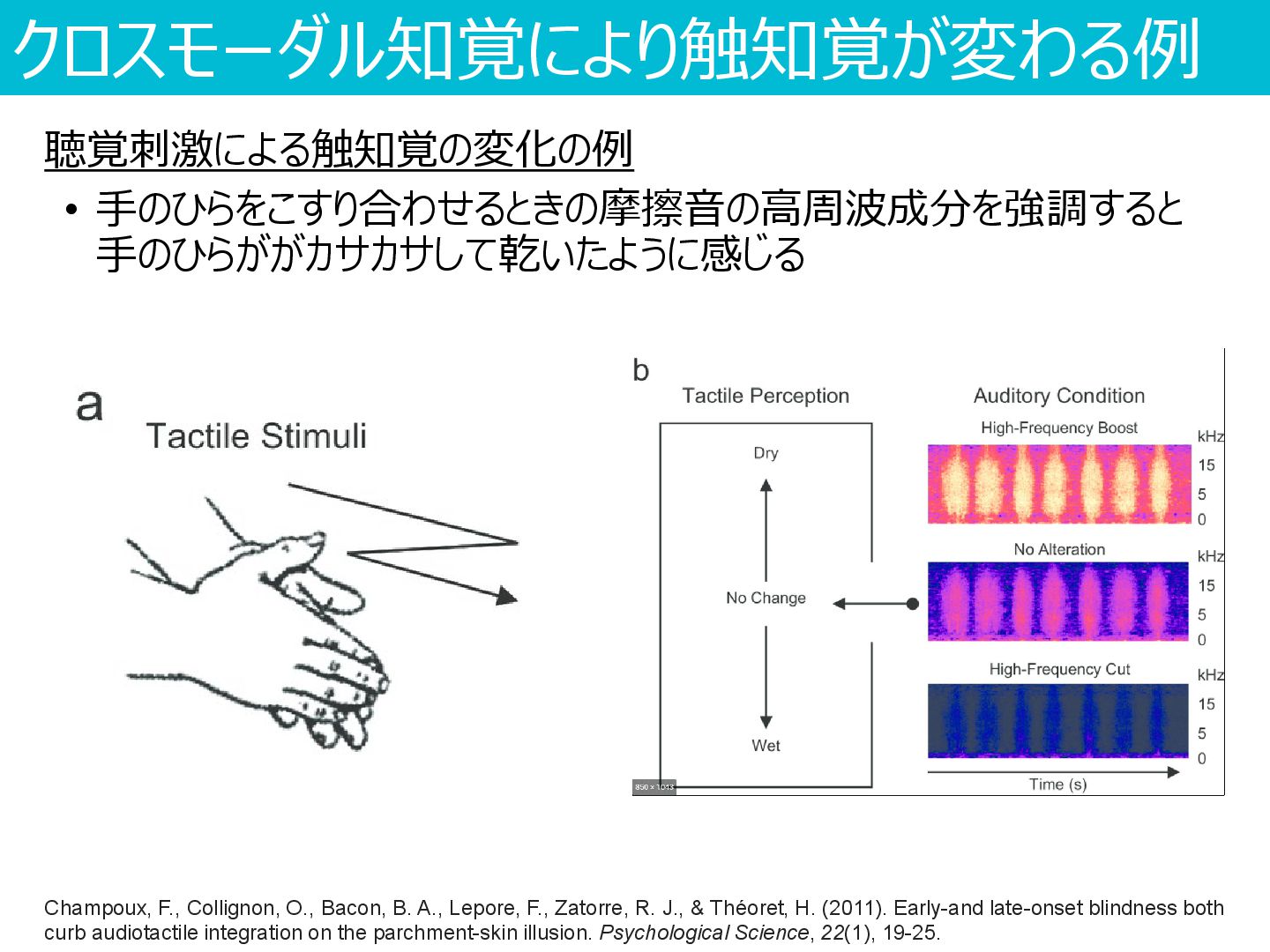
B. A., Lepore, F., Zatorre, R. J., & Théoret, H. (2011). Early-and late-onset blindness both curb audiotactile integration on the parchment-skin illusion. Psychological Science, 22(1), 19-25.
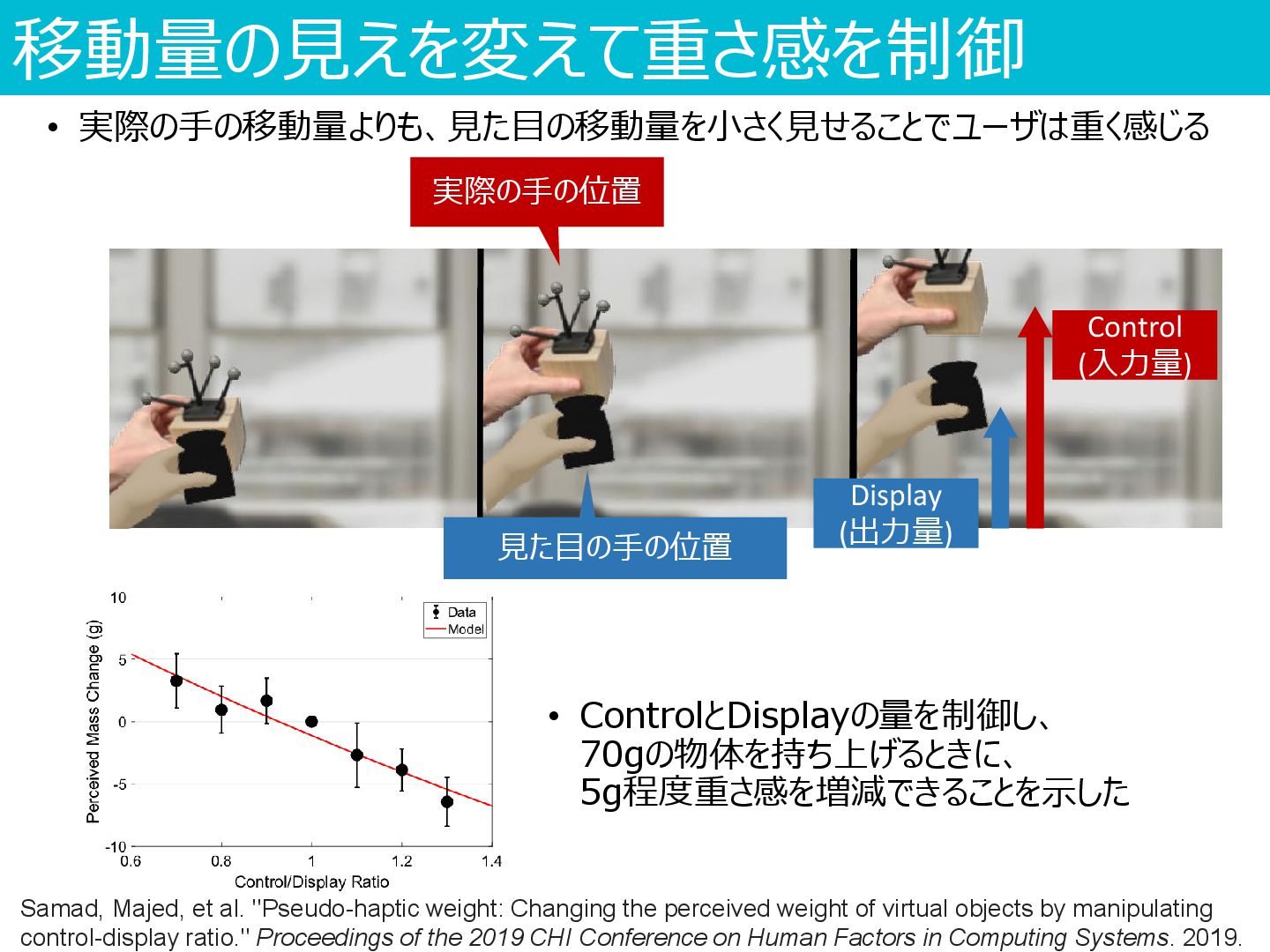
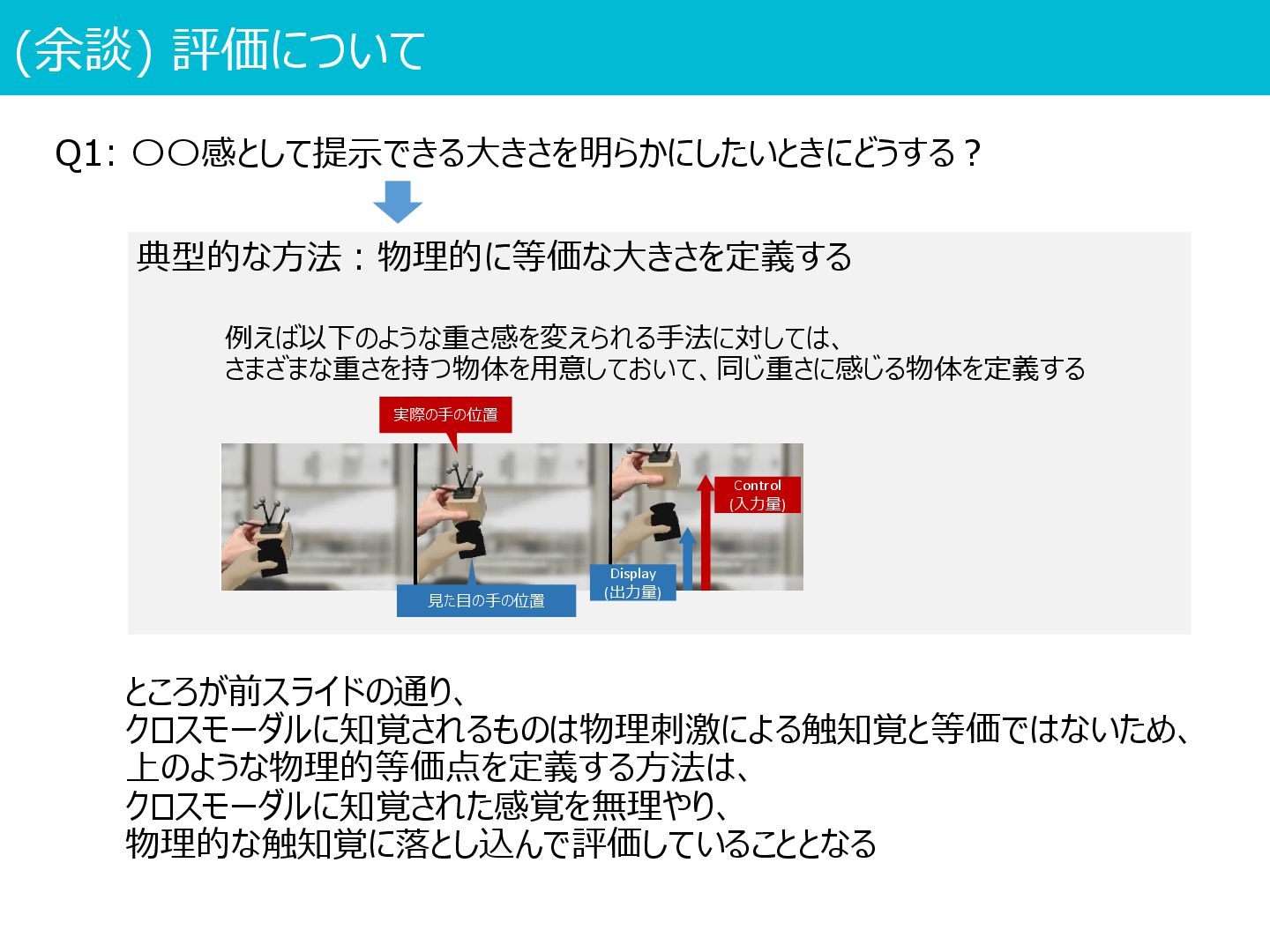
the perceived weight of virtual objects by manipulating control-display ratio." Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems. 2019. 実際の手の位置 見た目の手の位置 Control (入力量) Display (出力量) • ControlとDisplayの量を制御し、 70gの物体を持ち上げるときに、 5g程度重さ感を増減できることを示した
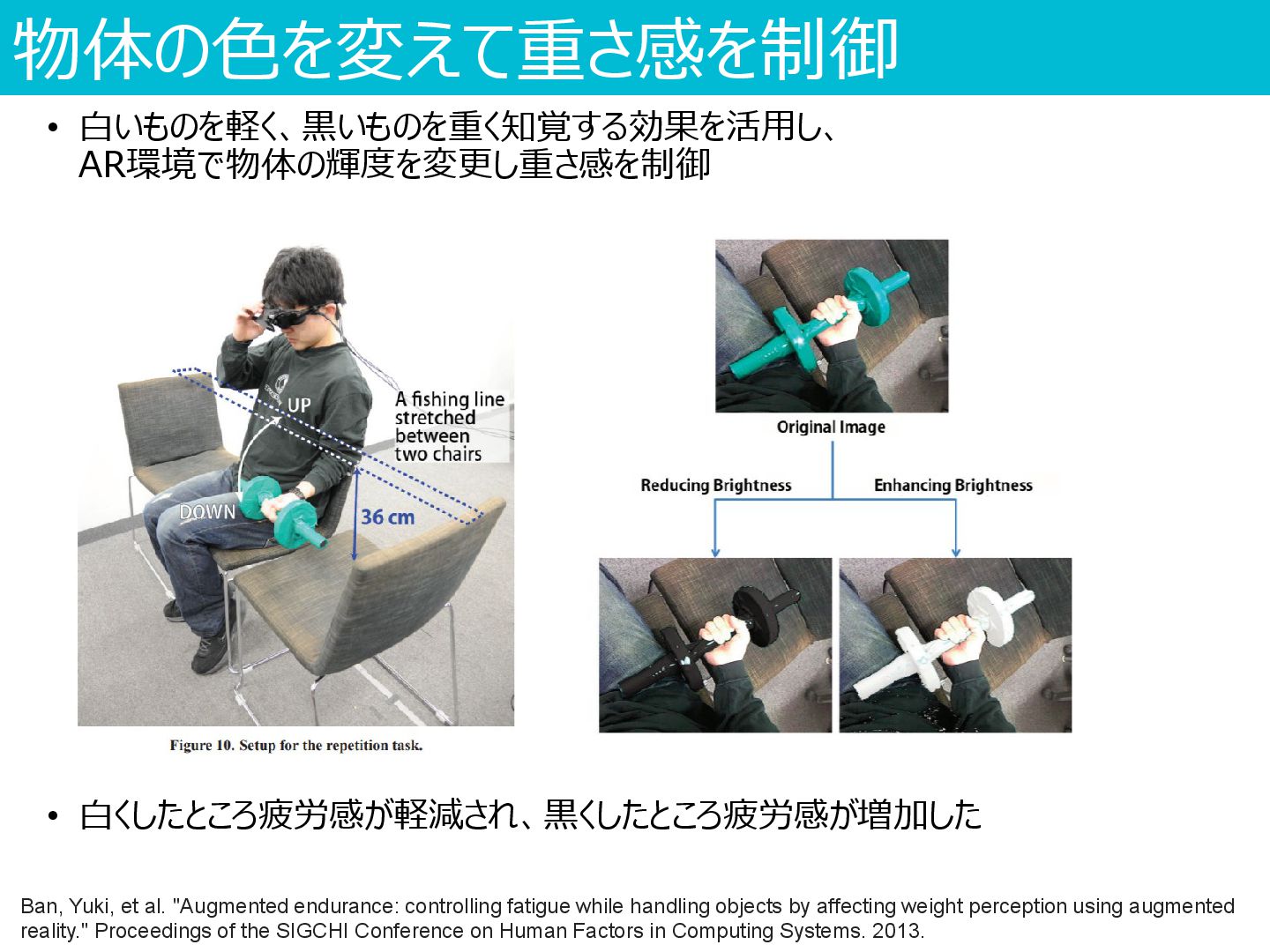
controlling fatigue while handling objects by affecting weight perception using augmented reality." Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. 2013. • 白くしたところ疲労感が軽減され、黒くしたところ疲労感が増加した
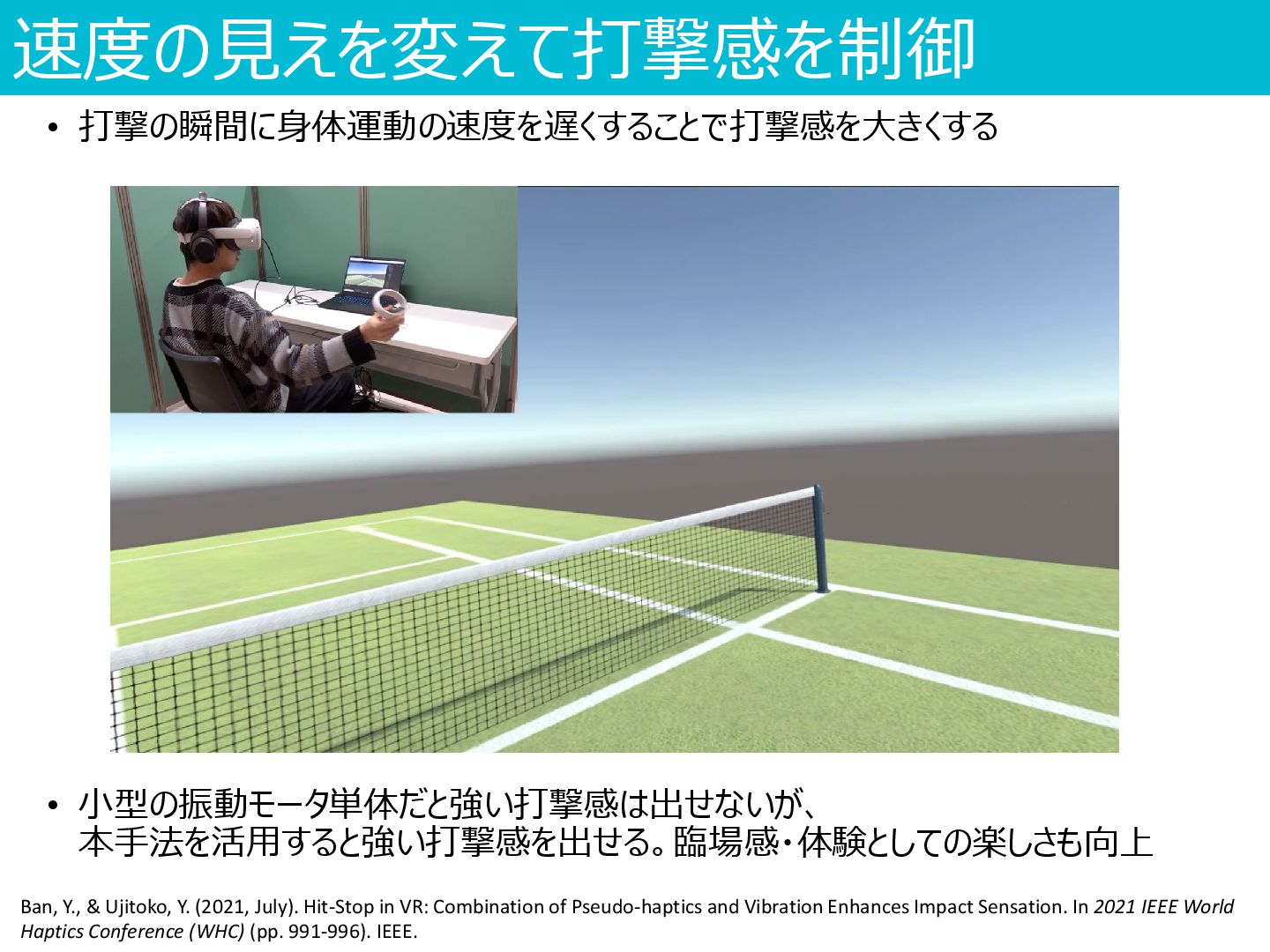
Hit-Stop in VR: Combination of Pseudo-haptics and Vibration Enhances Impact Sensation. In 2021 IEEE World Haptics Conference (WHC) (pp. 991-996). IEEE. • 小型の振動モータ単体だと強い打撃感は出せないが、 本手法を活用すると強い打撃感を出せる。臨場感・体験としての楽しさも向上
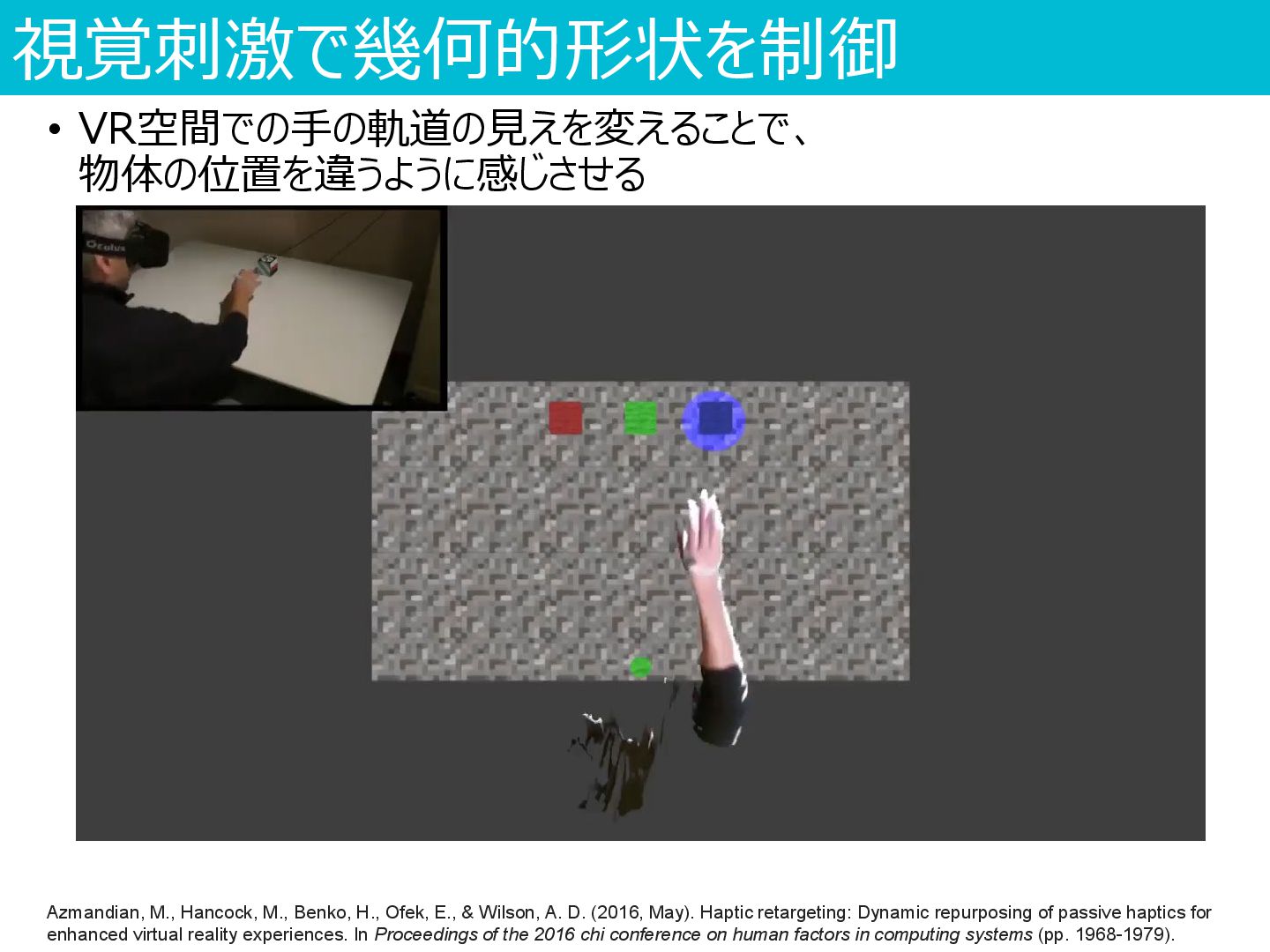
Ofek, E., & Wilson, A. D. (2016, May). Haptic retargeting: Dynamic repurposing of passive haptics for enhanced virtual reality experiences. In Proceedings of the 2016 chi conference on human factors in computing systems (pp. 1968-1979).
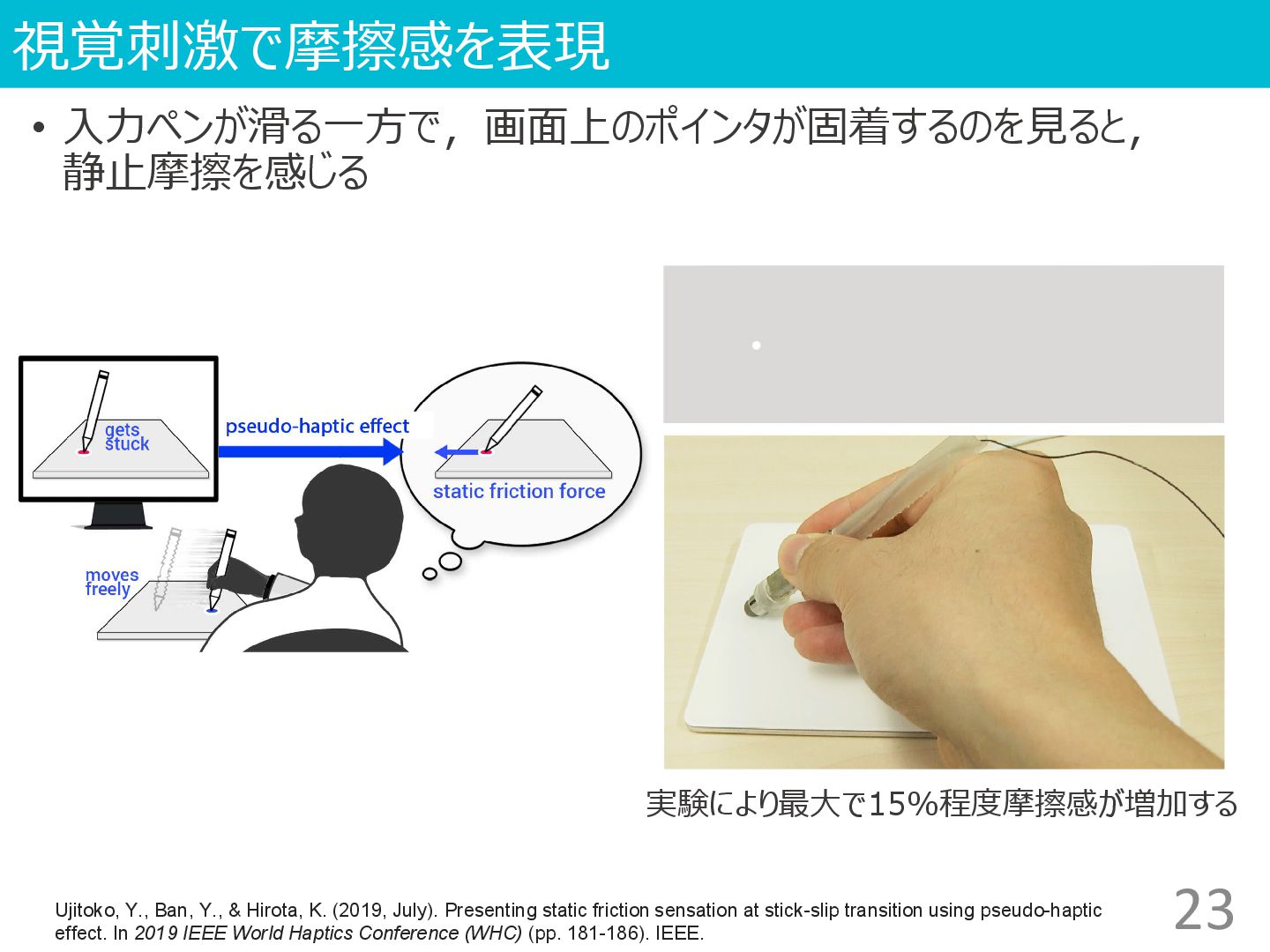
Hirota, K. (2019, July). Presenting static friction sensation at stick-slip transition using pseudo-haptic effect. In 2019 IEEE World Haptics Conference (WHC) (pp. 181-186). IEEE. 実験により最大で15%程度摩擦感が増加する
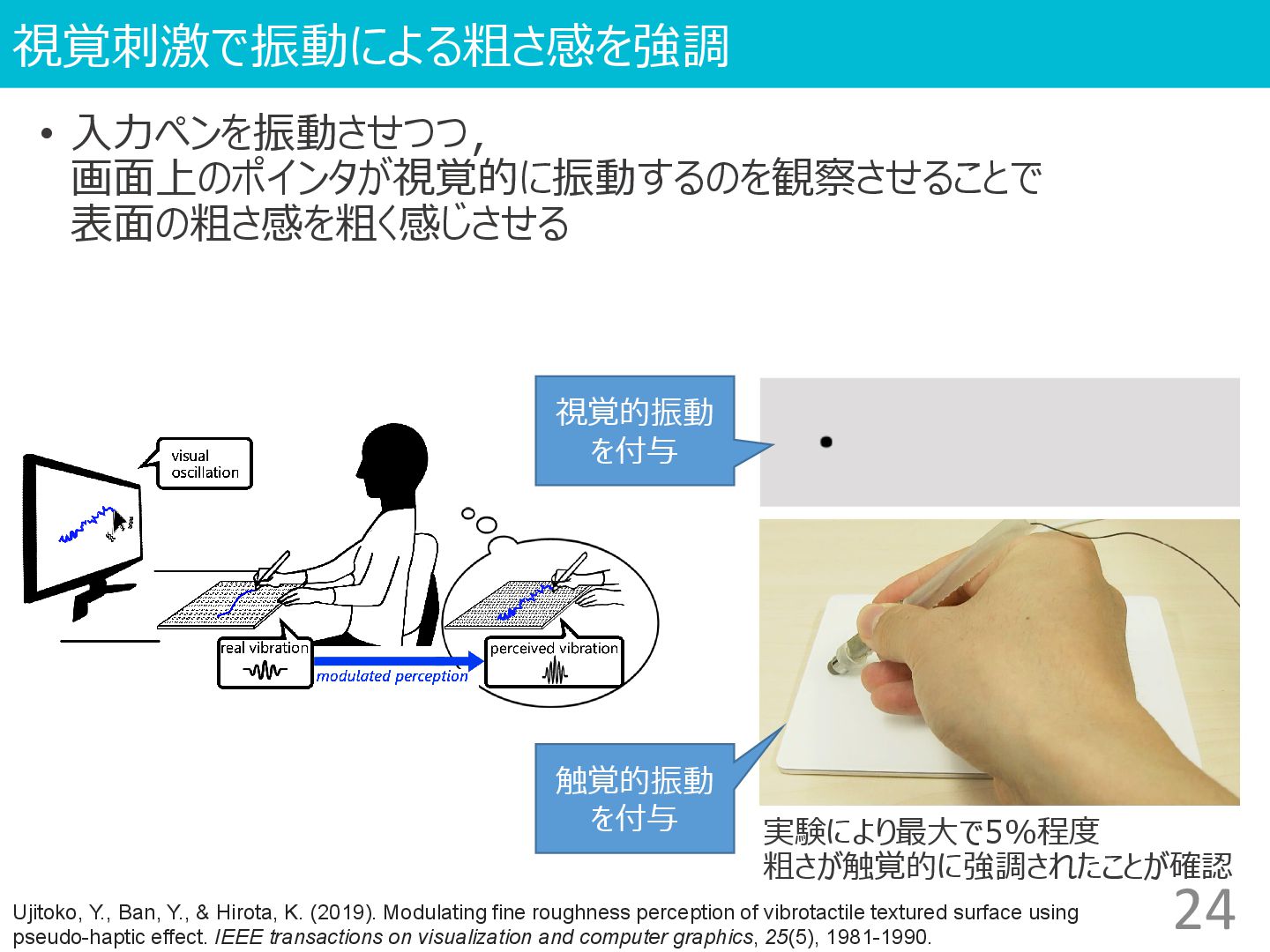
実験により最大で5%程度 粗さが触覚的に強調されたことが確認 Ujitoko, Y., Ban, Y., & Hirota, K. (2019). Modulating fine roughness perception of vibrotactile textured surface using pseudo-haptic effect. IEEE transactions on visualization and computer graphics, 25(5), 1981-1990.
Y., Sakurai, S., & Hirota, K. (2020, September). Surface Roughness Judgment During Finger Exploration Is Changeable by Visual Oscillations. In International Conference on Human Haptic Sensing and Touch Enabled Computer Applications (pp. 33- 41). Springer, Cham.
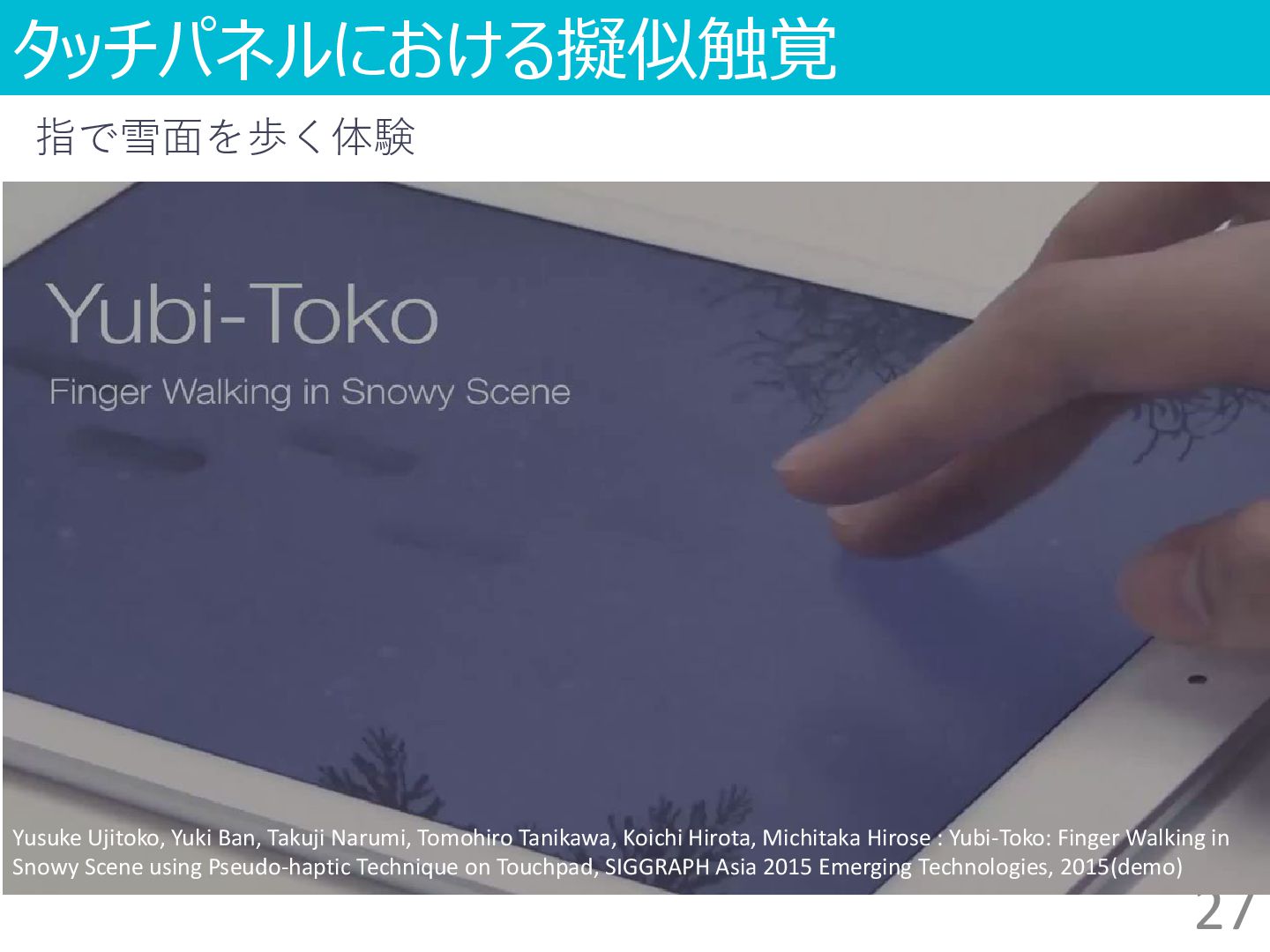
Tanikawa, Koichi Hirota, Michitaka Hirose : Yubi-Toko: Finger Walking in Snowy Scene using Pseudo-haptic Technique on Touchpad, SIGGRAPH Asia 2015 Emerging Technologies, 2015(demo)
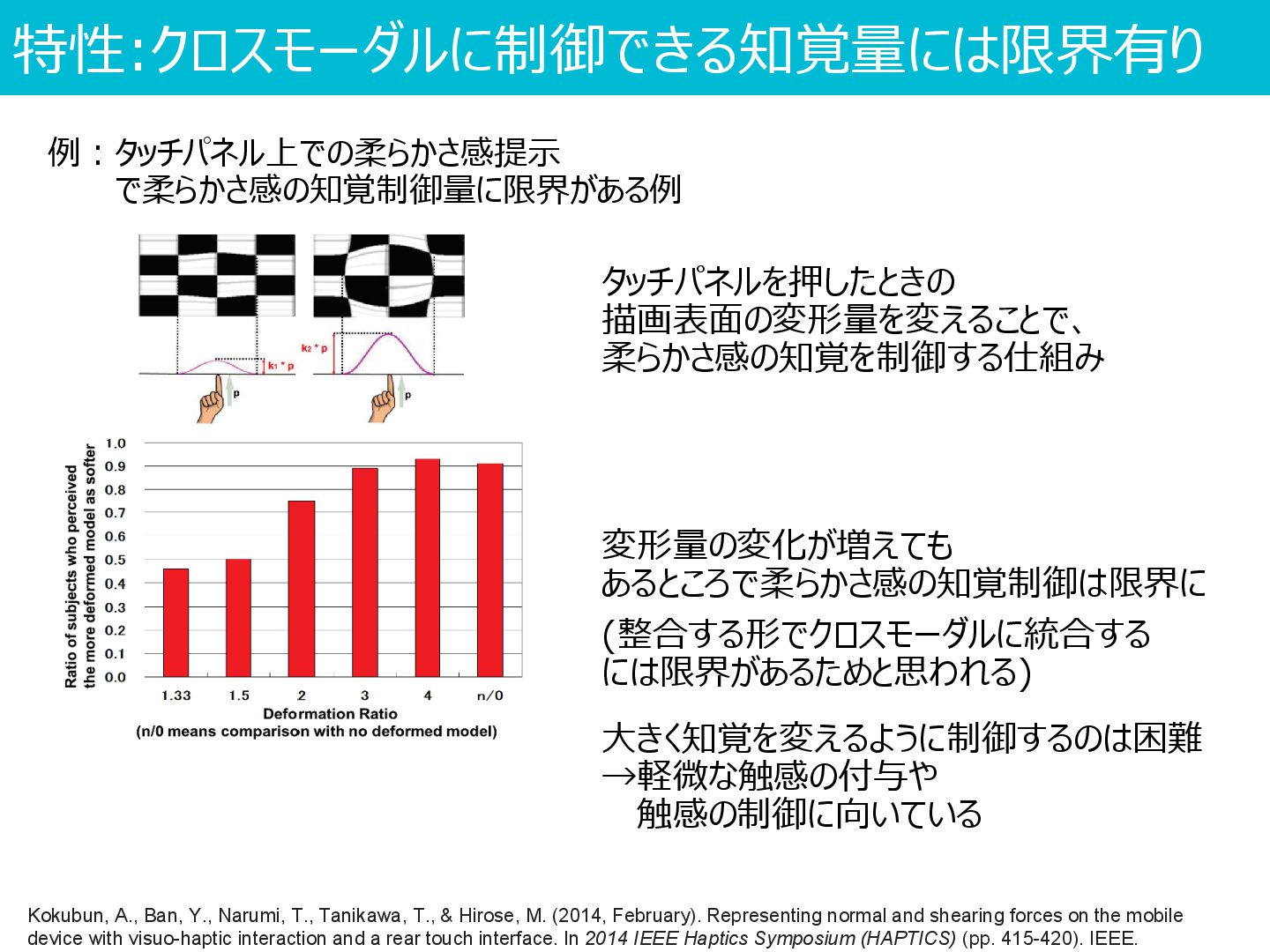
Kokubun, A., Ban, Y., Narumi, T., Tanikawa, T., & Hirose, M. (2014, February). Representing normal and shearing forces on the mobile device with visuo-haptic interaction and a rear touch interface. In 2014 IEEE Haptics Symposium (HAPTICS) (pp. 415-420). IEEE. 大きく知覚を変えるように制御するのは困難 →軽微な触感の付与や 触感の制御に向いている
& Ban, Y. (2021). Survey of Pseudo-haptics: Haptic Feedback Design and Application Proposals. IEEE Transactions on Haptics. https://ieeexplore.ieee.org/document/9424469 • 本日の内容にご興味を持たれた方は↓をご参照ください
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}