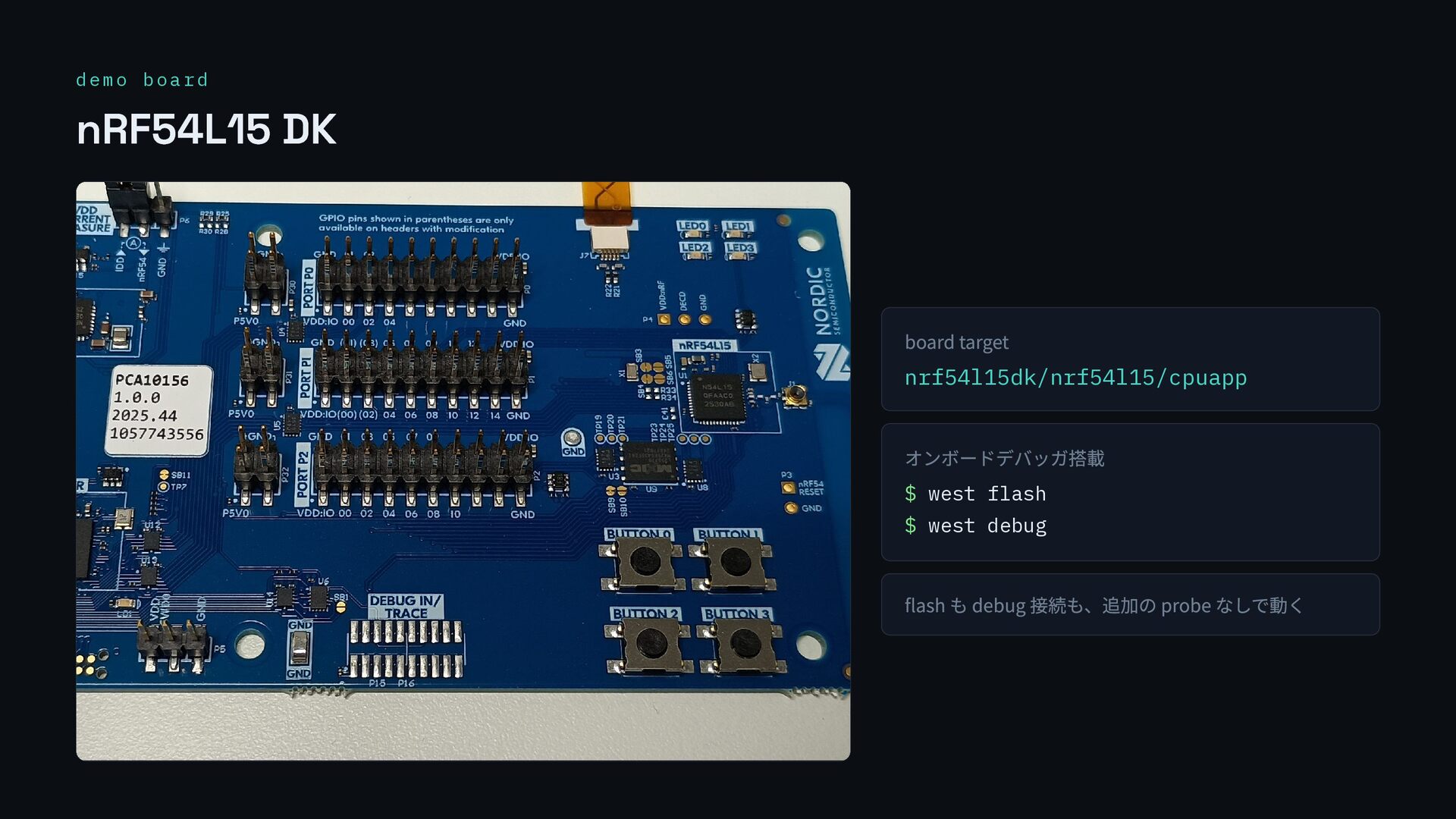
u p S a p p o r o 2 0 2 6 Zephyr の デバッグ技法 問題の種類とコストで、道具を選ぶ Debugging Zephyr: Choosing the Right Tool When Things Go Wrong Yasushi SHOJI 荘司 靖 / Space Cubics・Zephyr Ambassador nrf54l15dk/nrf54l15/cpuapp •
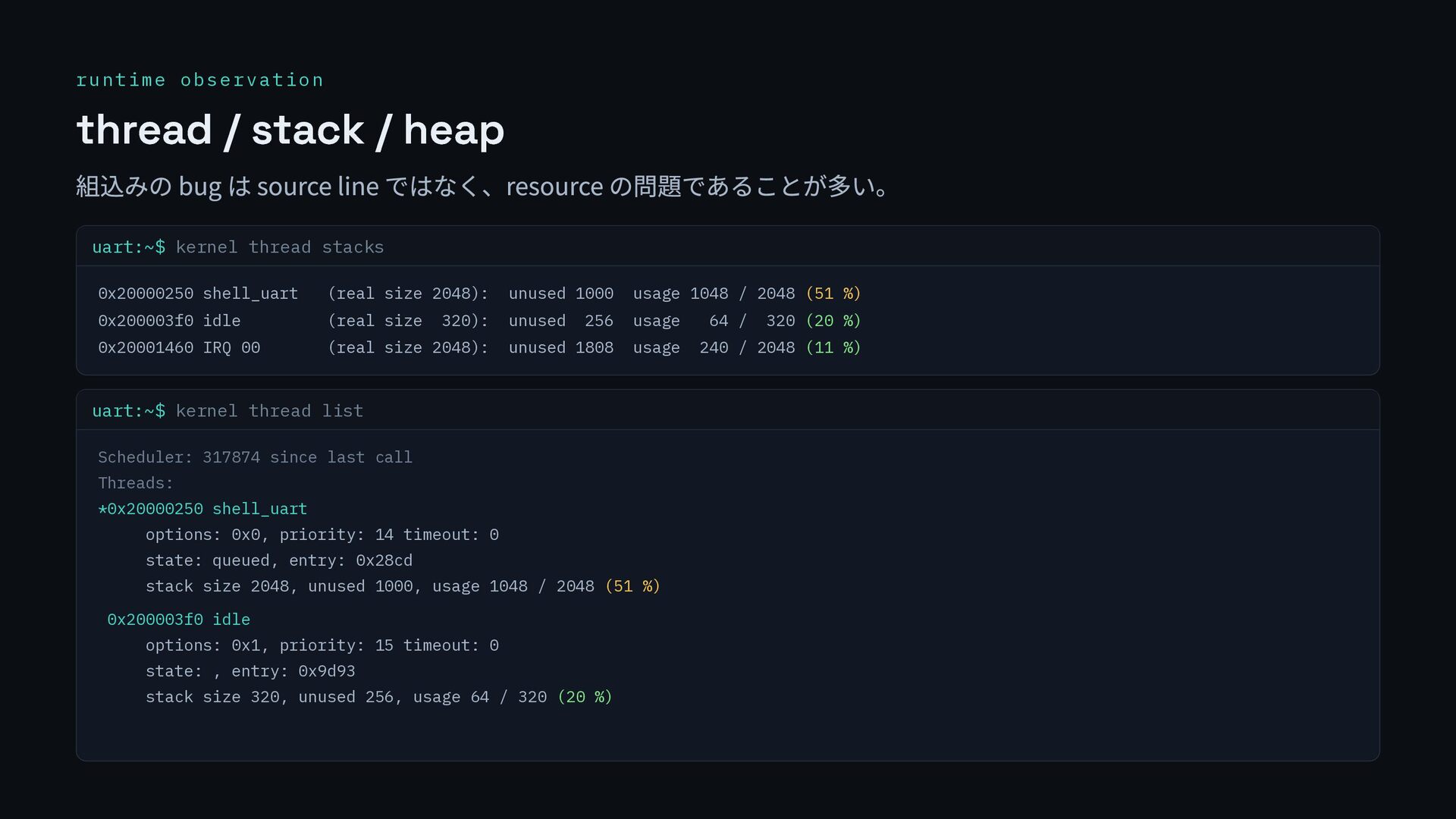
west build -b <board> -- \ -DCONFIG_SHELL=y \ -DCONFIG_CAN=y -DCONFIG_CAN_SHELL=y \ -DCONFIG_SPI=y -DCONFIG_SPI_SHELL=y \ -DCONFIG_LED=y -DCONFIG_LED_SHELL=y uart:~$ help uart:~$ device list uart:~$ kernel thread list uart:~$ spi uart:~$ can show / can send uart:~$ led on leds 0 uart:~$ led on leds 1 Zephyr built-in help / device list / kernel thread list peripheral / subsystem spi / can / led — デバイスドライバのテストに役立つ 前提 shell thread / scheduler / console backend が生きていること
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
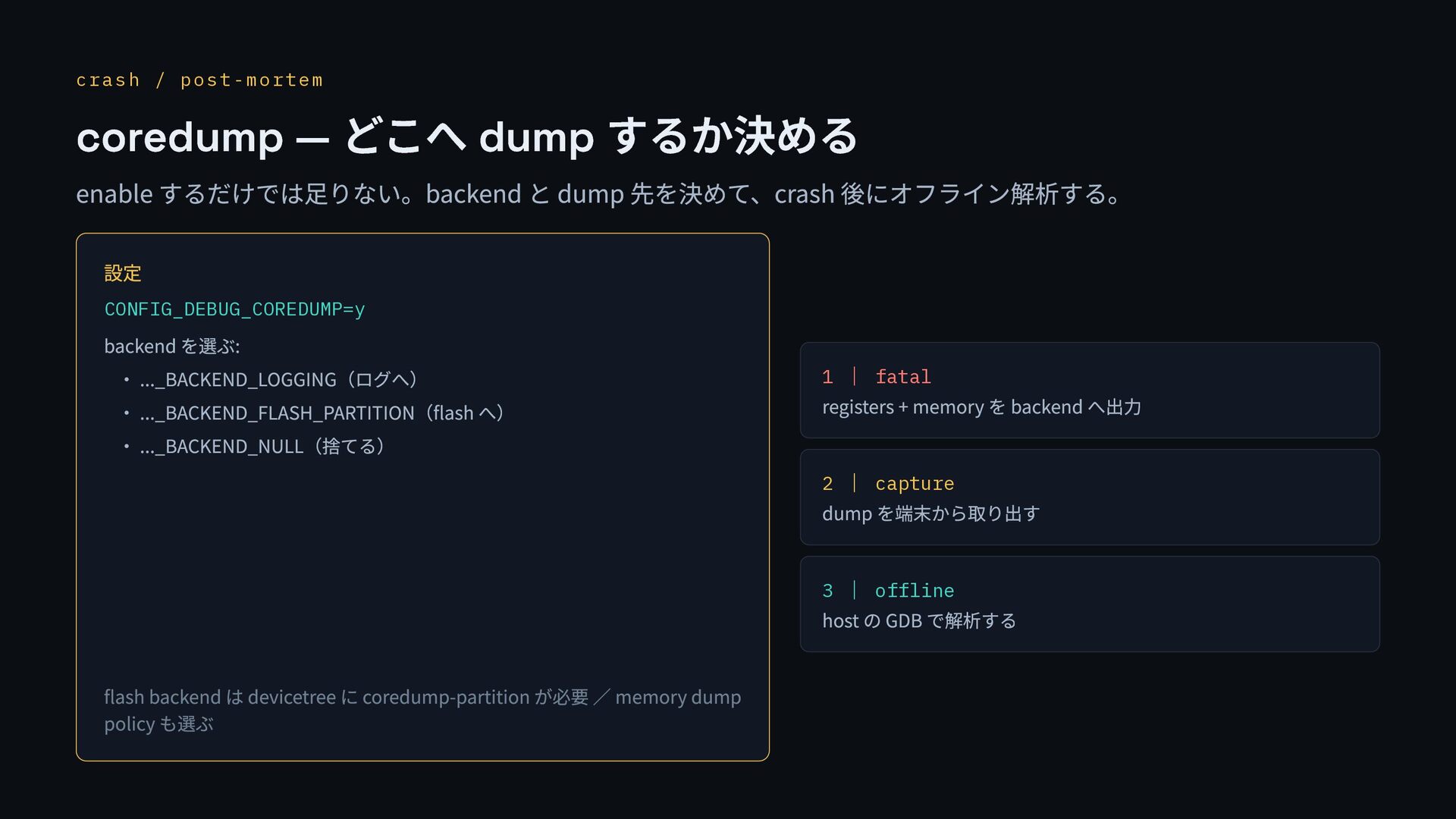
![crash / post-mortem crash する FATAL ASSERTION FAIL [false] @](https://files.speakerdeck.com/presentations/5fea4f4fbb724d058075c50d88a11bbc/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}