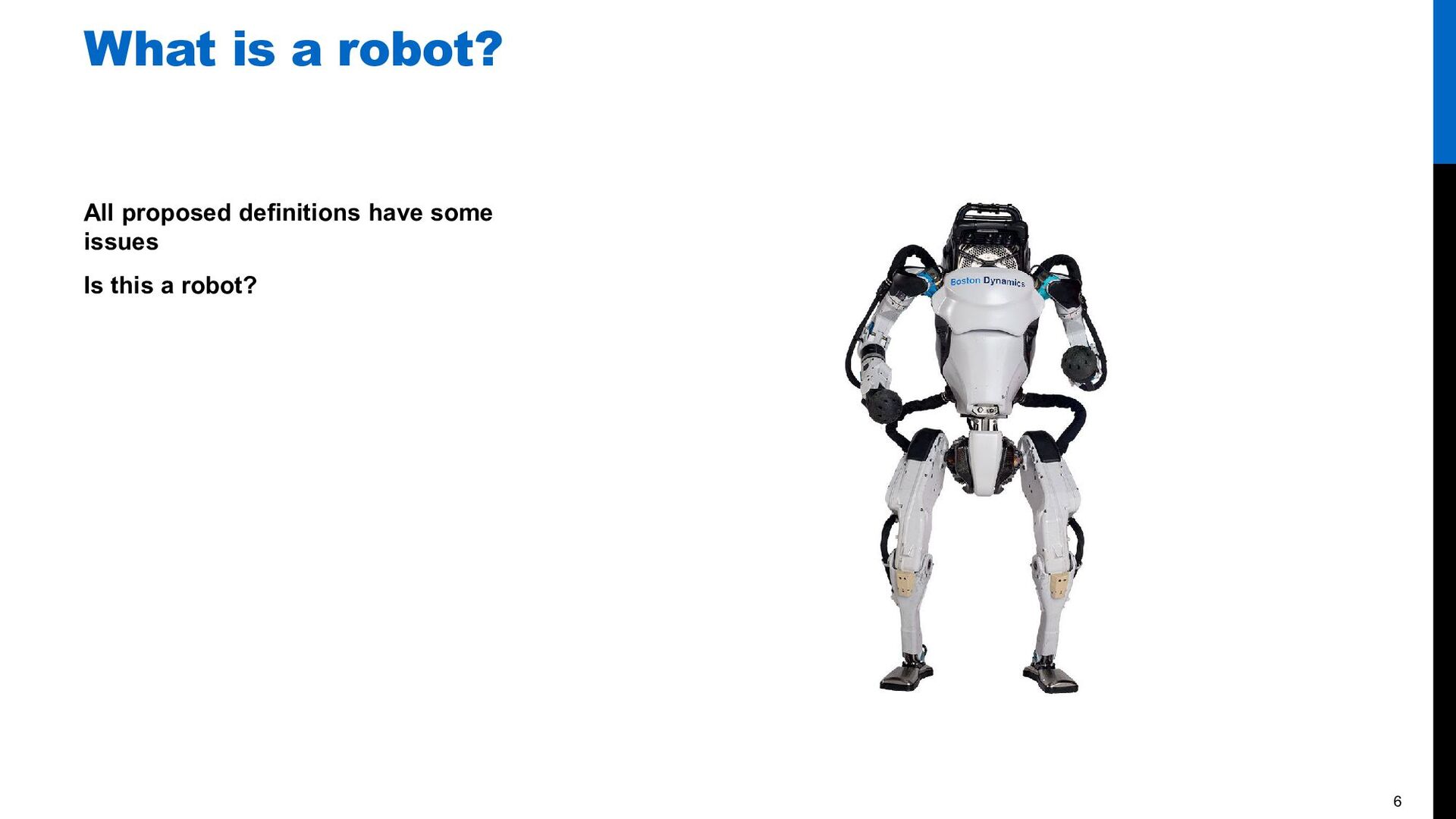
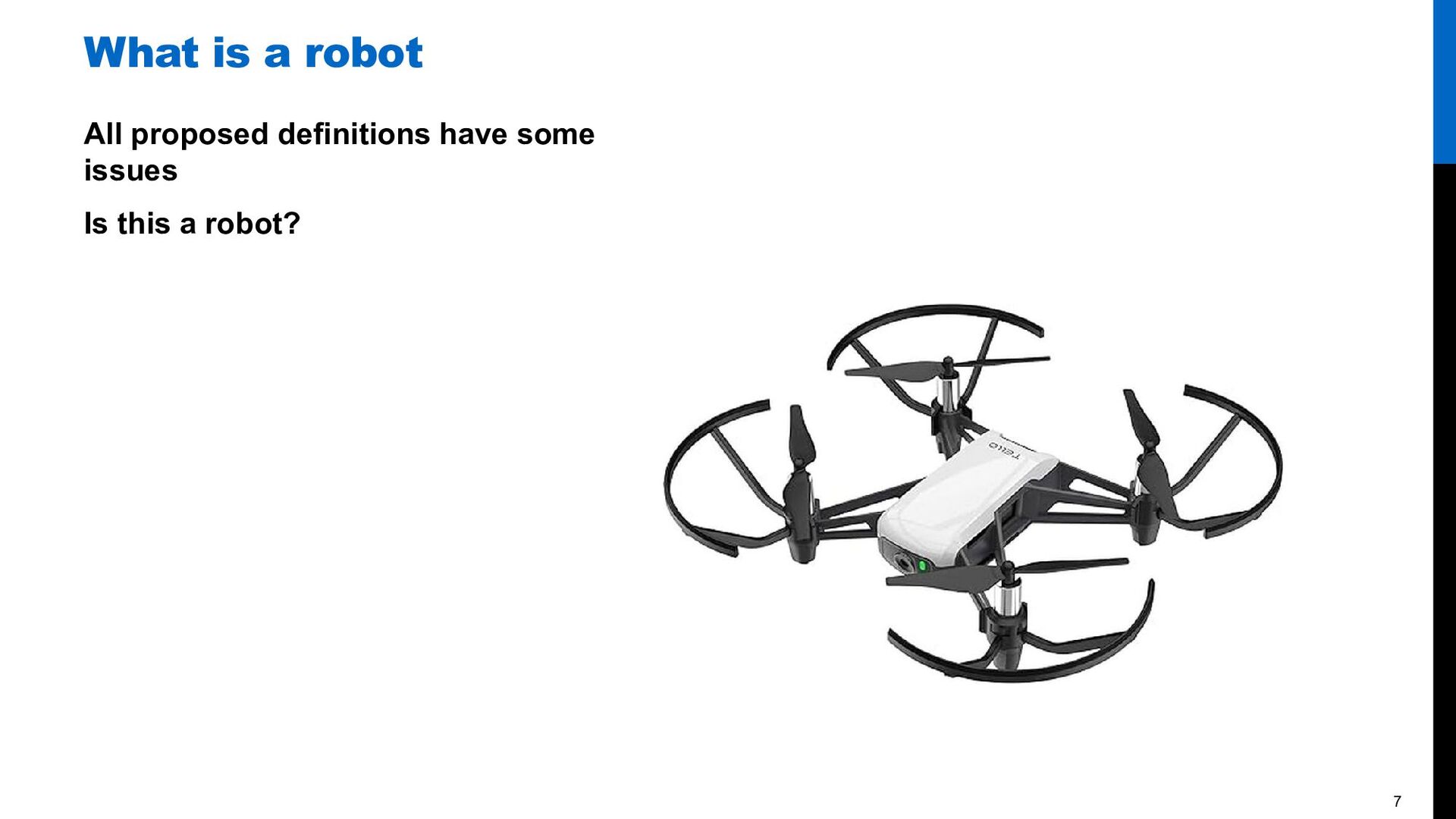
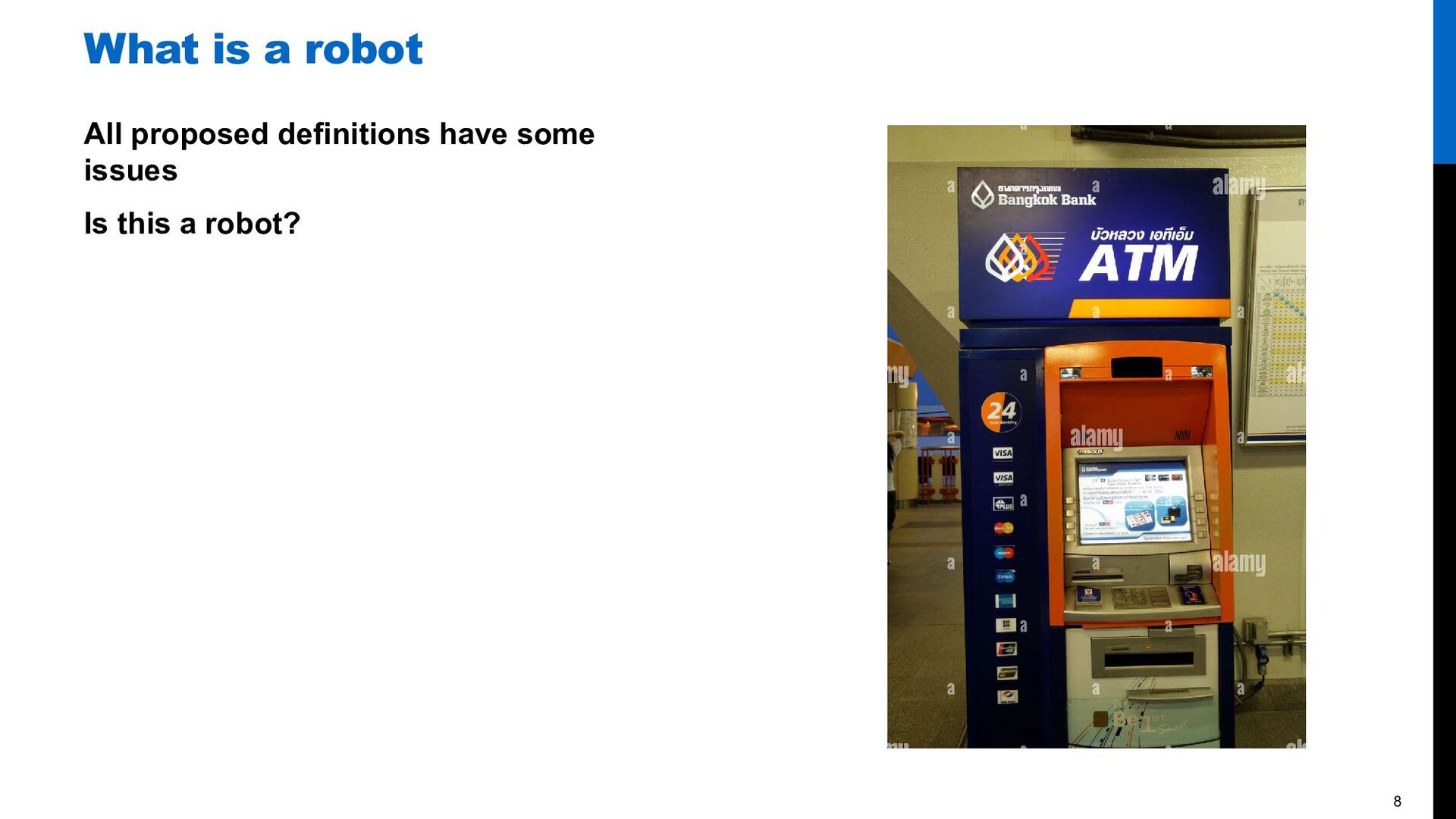
programmable by a computer — capable of carrying out a complex series of actions automatically [Wikipedia/ dictionary definition] • A reprogrammable, multifunctional manipulator designed to move material, parts, tools or specialized devices through variable programmed motions for the performance of a variety of tasks [Robotics Industries Association] • An autonomous machine capable of sensing its environment, carrying out computations to make decisions, and performing actions in the real world [https://robots.ieee.org/learn/] What is a robot?
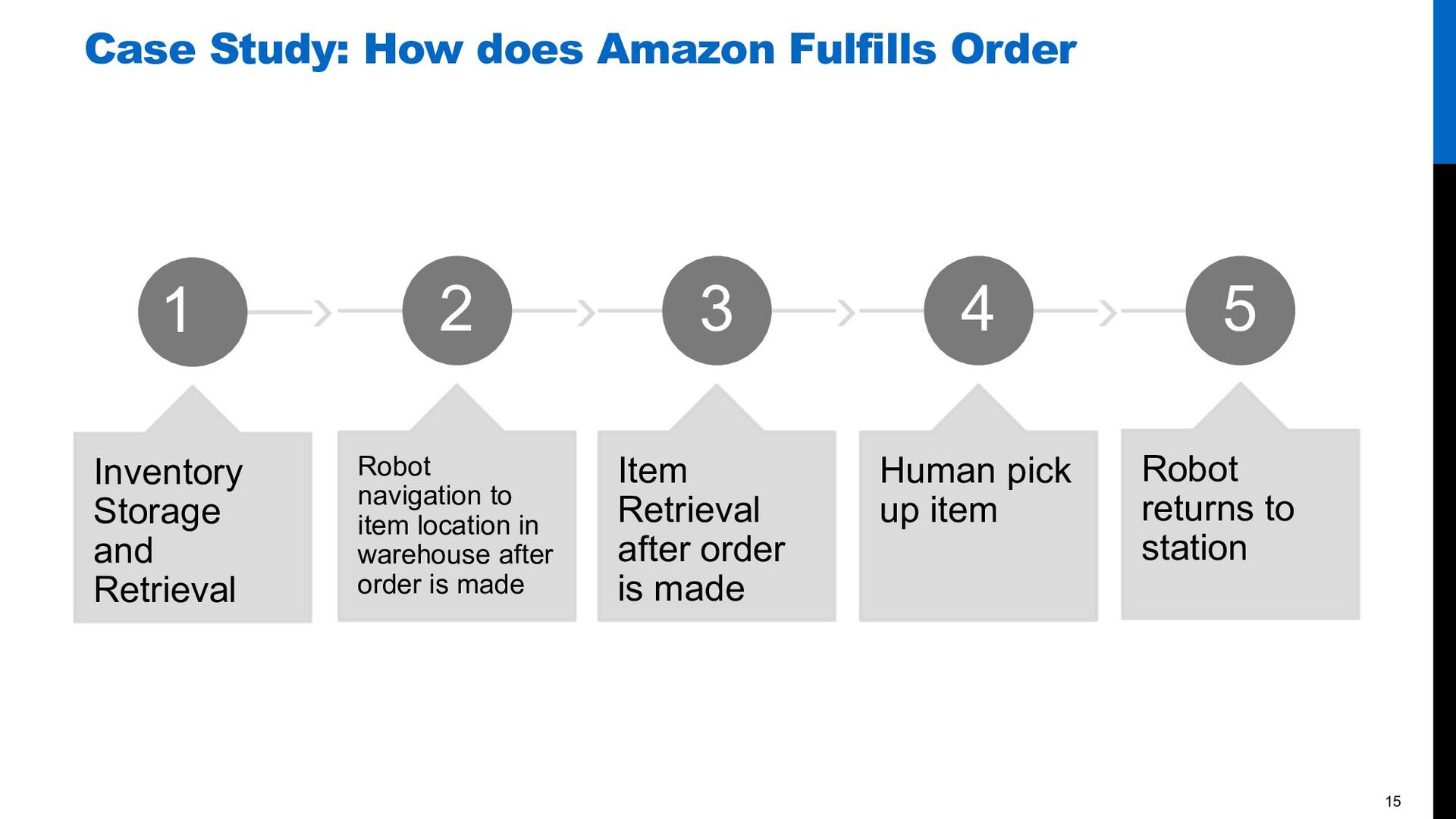
Storage and Retrieval 2 Robot navigation to item location in warehouse after order is made 3 Item Retrieval after order is made 4 Human pick up item 5 Robot returns to station
of the robot • Uncertainty in the dynamics of the world • Uncertainty in the geometry of the world • Uncertainty in sensor measurements • Balancing performance, power consumption, and cost adds complexity to the design process. • Safety and ethics issue • Cost and resources
really fascinating technical challenges (many of which we’ll discuss) • Beautiful connections with many fields • AI, machine learning, control theory, computer vision, optimization, information theory, theoretical computer science, applied math, … • Provides a lens on the really BIG questions oWhat is intelligence? What makes us human? What is consciousness? What is free will? • Applicability of these techniques extends well beyond robotics • Economic and social consequences: Jobs are at risk of automation • It’s really cool!
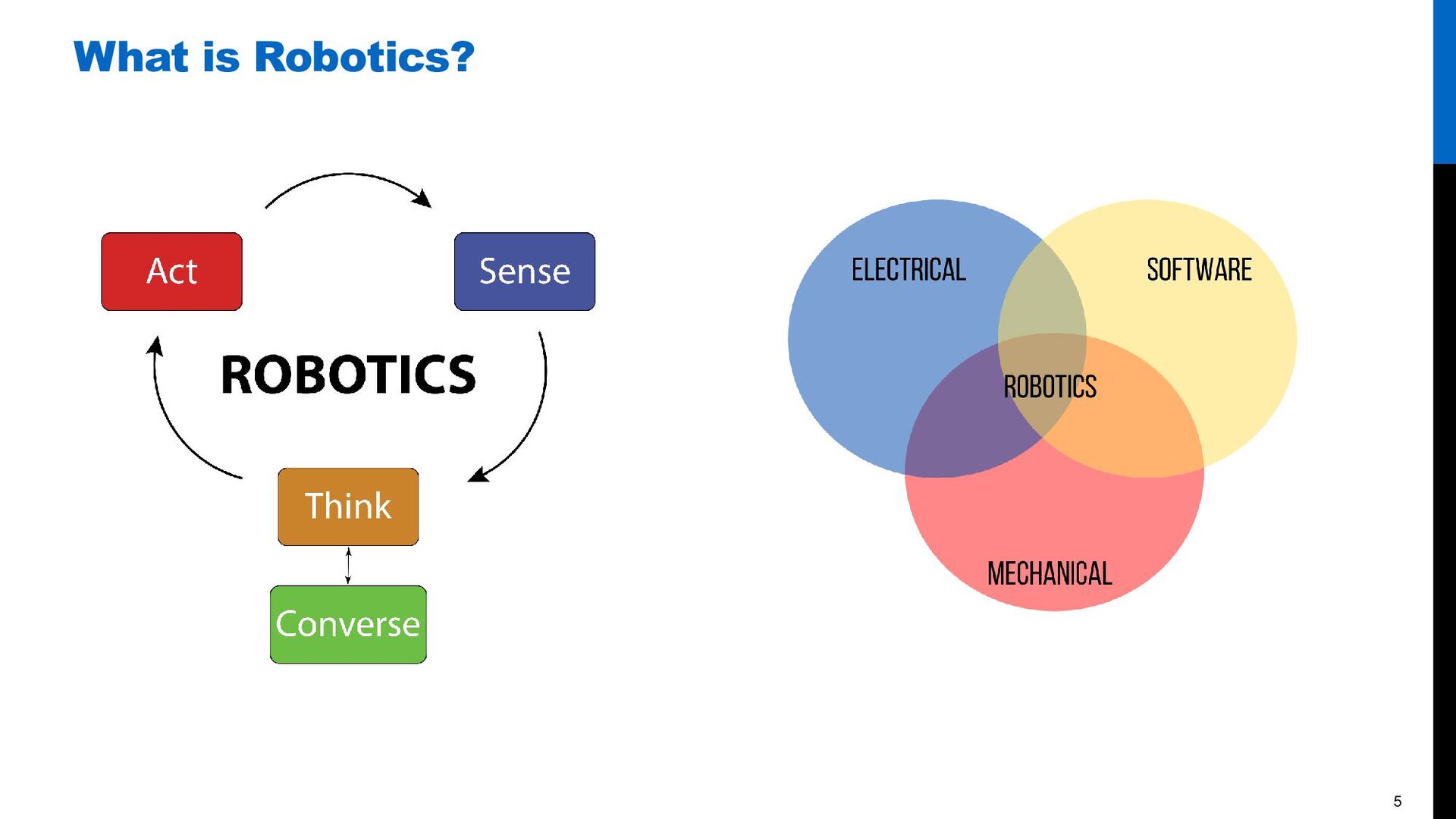
Electrical engineering: sensors, embedded systems, circuits and systems Mechanical Engineering CAD and 3D modelling skills Programming Software engineering(Python/C++) Maths/Physics/Statistics skills Robot Operating System(ROS1 and 2)
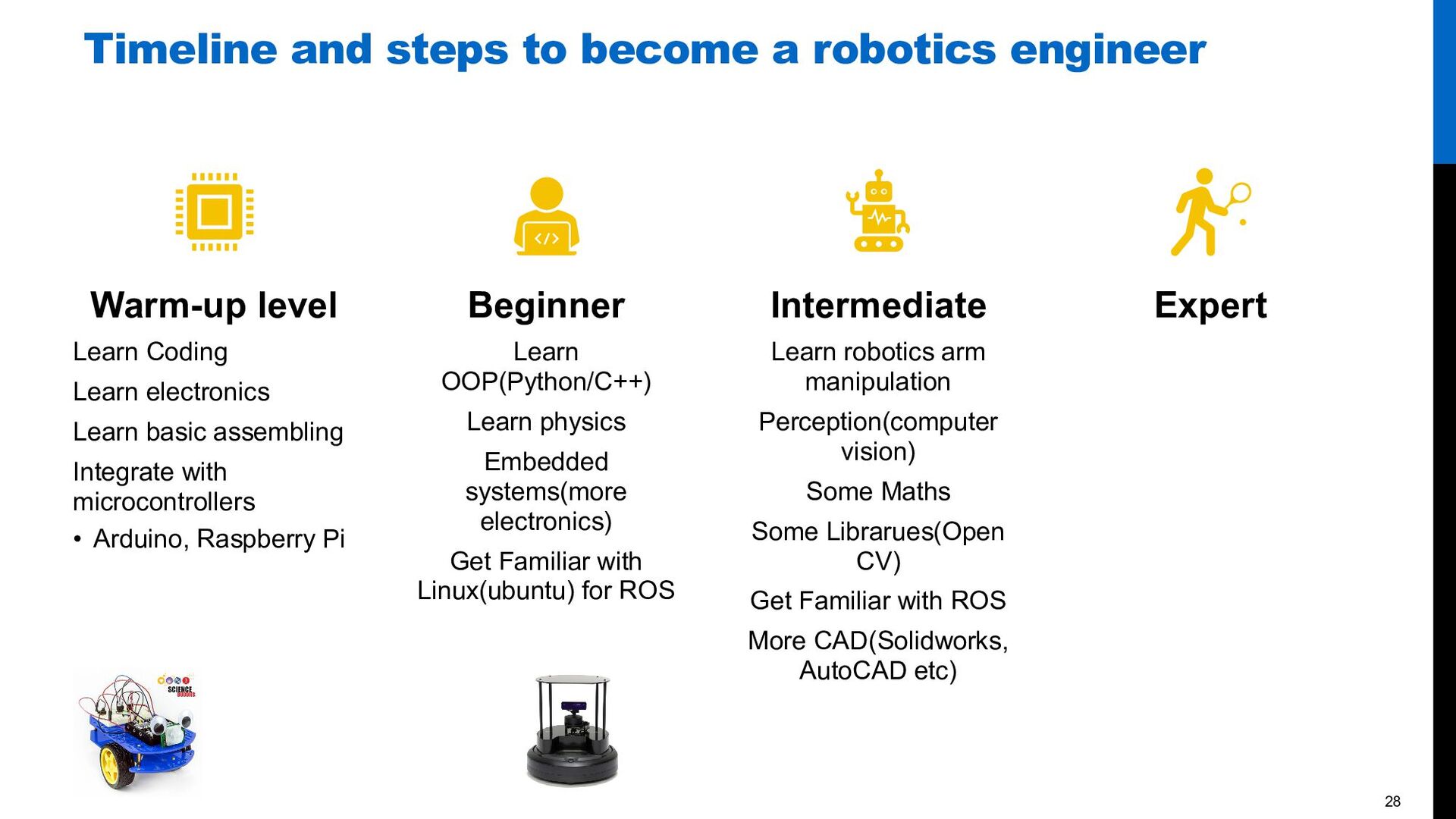
level Learn Coding Learn electronics Learn basic assembling Integrate with microcontrollers • Arduino, Raspberry Pi Beginner Learn OOP(Python/C++) Learn physics Embedded systems(more electronics) Get Familiar with Linux(ubuntu) for ROS Intermediate Learn robotics arm manipulation Perception(computer vision) Some Maths Some Librarues(Open CV) Get Familiar with ROS More CAD(Solidworks, AutoCAD etc) Expert
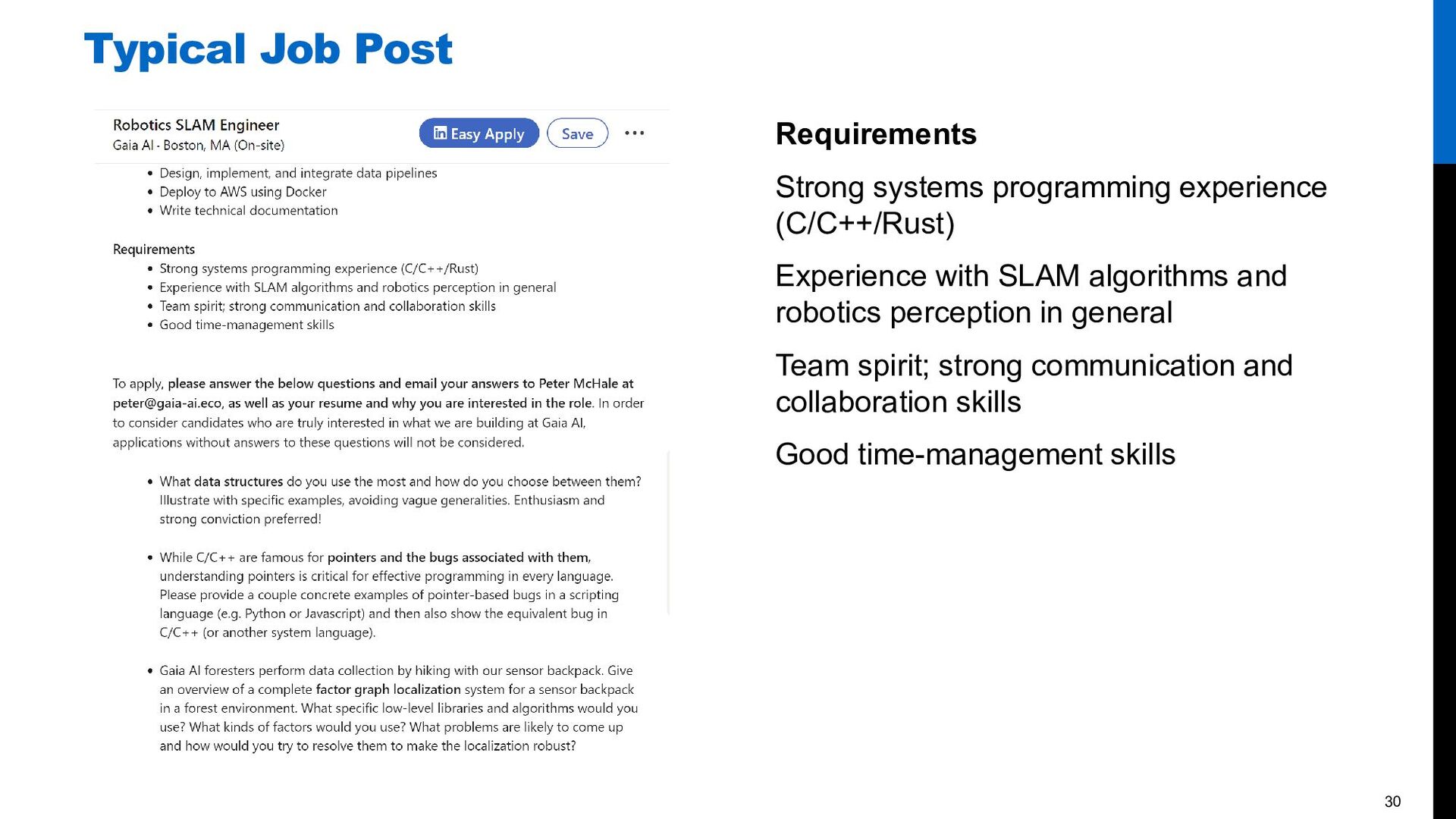
Experience with SLAM algorithms and robotics perception in general Team spirit; strong communication and collaboration skills Good time-management skills
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}