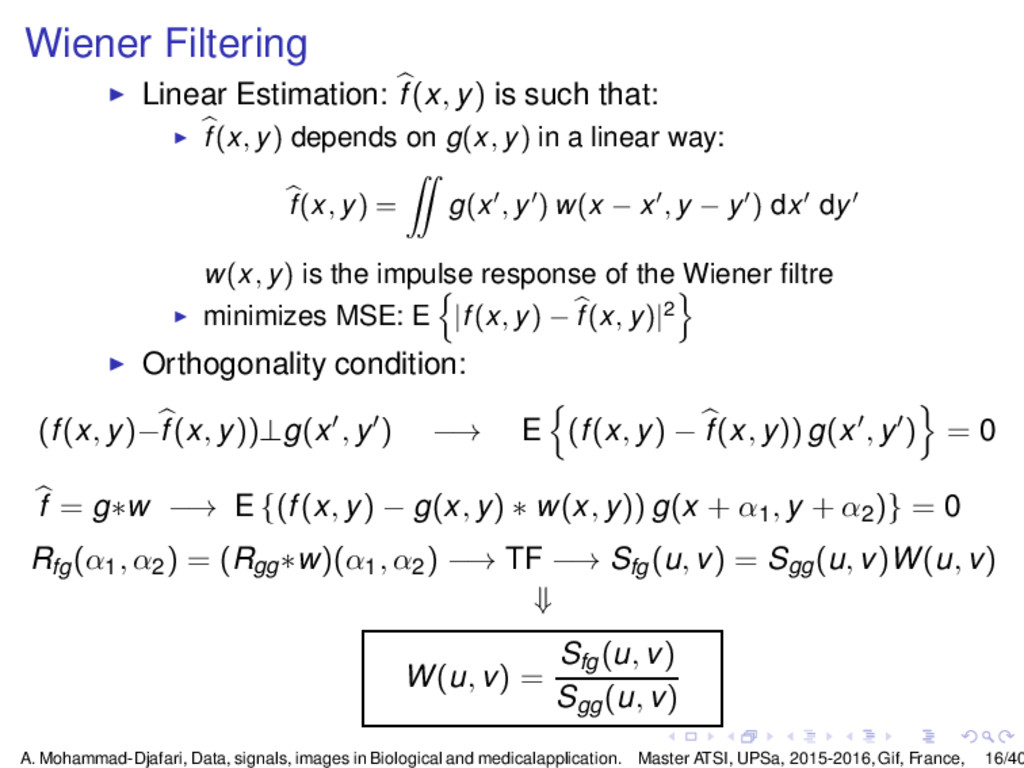
◮ f(x, y) depends on g(x, y) in a linear way: f(x, y) = g(x′, y′) w(x − x′, y − y′) dx′ dy′ w(x, y) is the impulse response of the Wiener filtre ◮ minimizes MSE: E |f(x, y) − f(x, y)|2 ◮ Orthogonality condition: (f(x, y)−f (x, y))⊥g(x′, y′) −→ E (f(x, y) − f(x, y)) g(x′, y′) = 0 f = g∗w −→ E {(f(x, y) − g(x, y) ∗ w(x, y)) g(x + α1 , y + α2 )} = 0 Rfg (α1 , α2 ) = (Rgg ∗w)(α1 , α2 ) −→ TF −→ Sfg (u, v) = Sgg(u, v)W(u, v) ⇓ W(u, v) = Sfg (u, v) Sgg(u, v) A. Mohammad-Djafari, Data, signals, images in Biological and medicalapplication. Master ATSI, UPSa, 2015-2016, Gif, France, 16/40
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
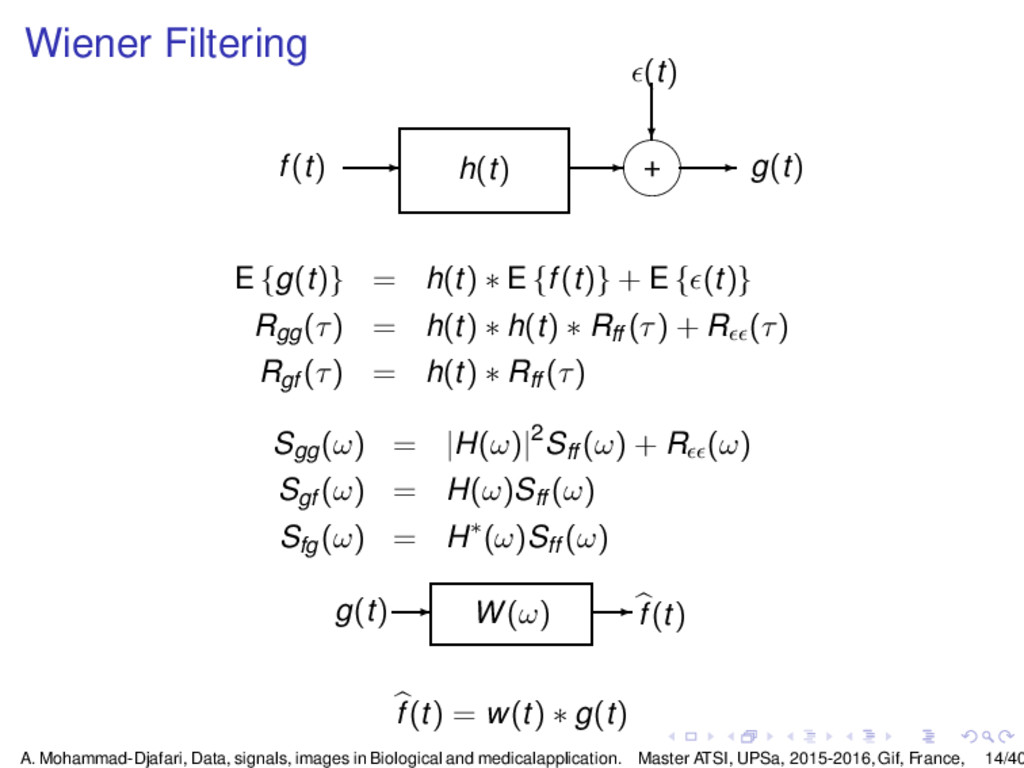
![Wiener Filtering EQM = E [f(t) − f(t)]2 = E](https://files.speakerdeck.com/presentations/a66ef7e654ff4cbe92ffa3e7a8f606d4/slide_14.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Algebraic Approches: Generalized Inversion General case of [M, N] matrix](https://files.speakerdeck.com/presentations/a66ef7e654ff4cbe92ffa3e7a8f606d4/slide_19.jpg){kind=link}
![Regularization Jλ (f) = [Hf−g]′[Hf−g]+λ[Df]′[Df] = Hf−g 2+λ Df 2](https://files.speakerdeck.com/presentations/a66ef7e654ff4cbe92ffa3e7a8f606d4/slide_20.jpg){kind=link}
{kind=link}
![Regularization Algorithmes: 3 main approaches f = [H′H + λD′D]−1H′g](https://files.speakerdeck.com/presentations/a66ef7e654ff4cbe92ffa3e7a8f606d4/slide_22.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Regularization: Recursive algorithms f = [H′H + λD]−1H′g Main idea:](https://files.speakerdeck.com/presentations/a66ef7e654ff4cbe92ffa3e7a8f606d4/slide_29.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}