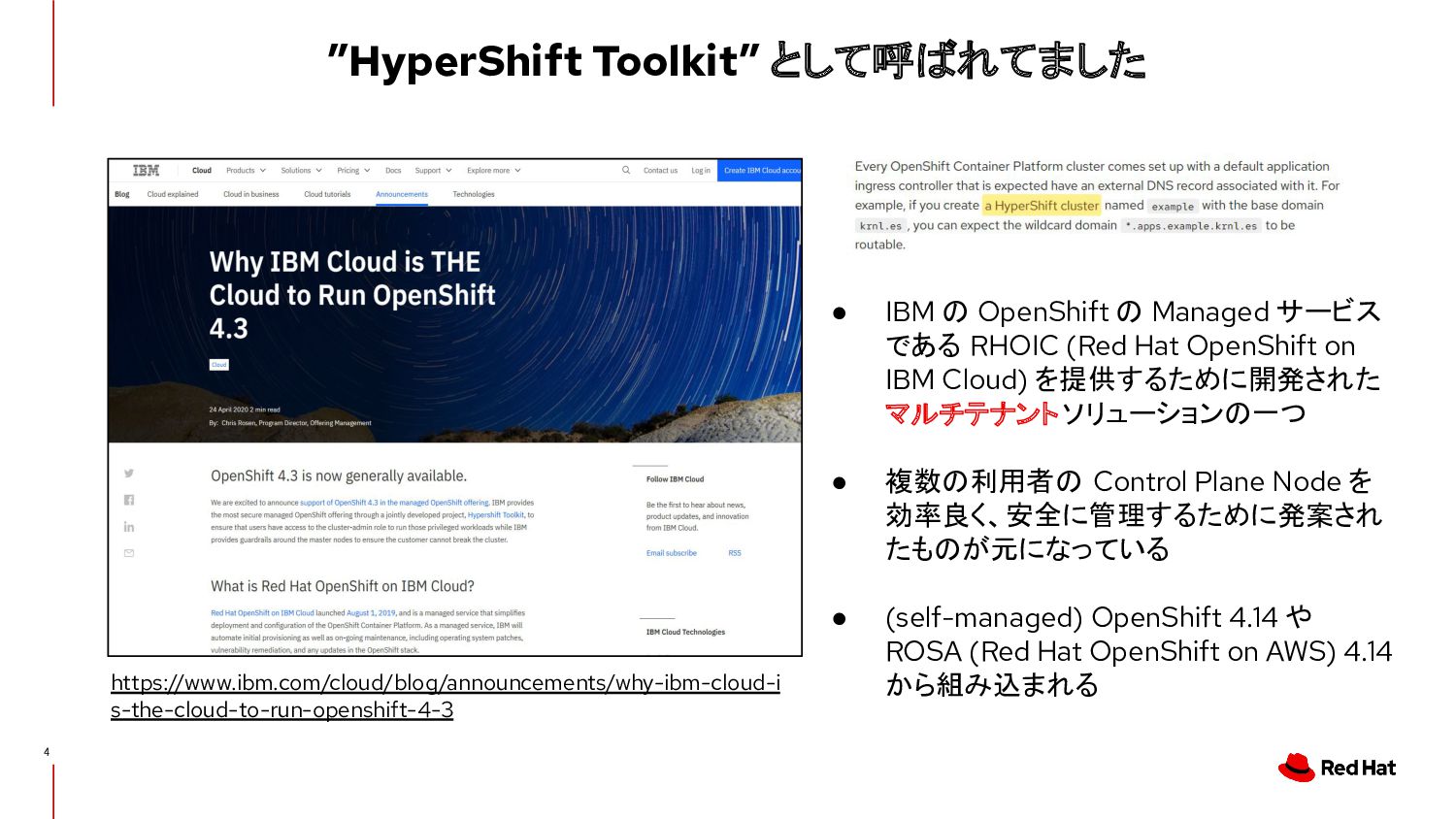
である RHOIC (Red Hat OpenShift on IBM Cloud) を提供するために開発された マルチテナントソリューションの一つ • 複数の利用者の Control Plane Node を 効率良く、安全に管理するために発案され たものが元になっている • (self-managed) OpenShift 4.14 や ROSA (Red Hat OpenShift on AWS) 4.14 から組み込まれる ”HyperShift Toolkit” として呼ばれてました
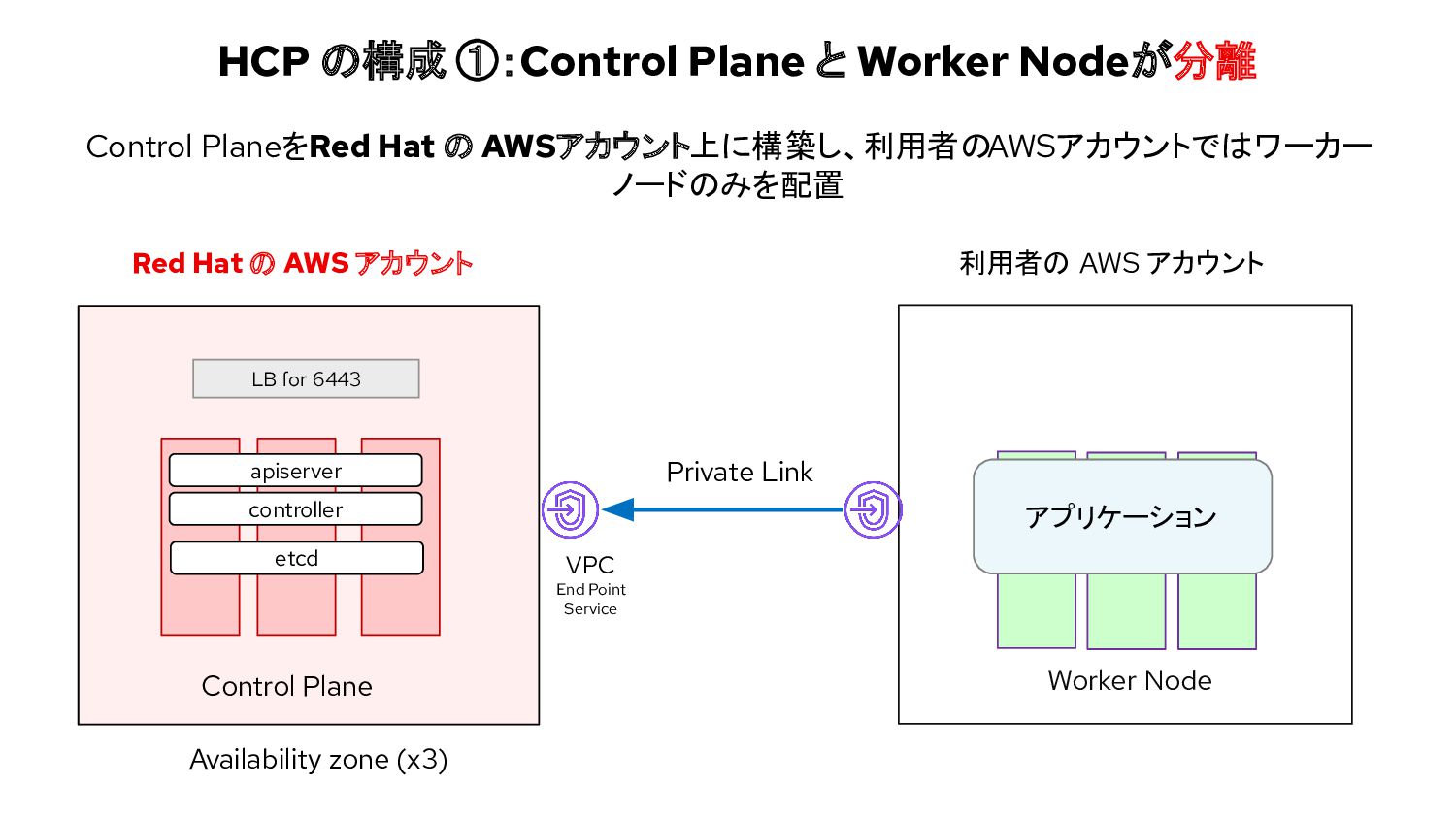
と Worker Nodeが分離 LB for 6443 Control PlaneをRed Hat の AWSアカウント上に構築し、利用者のAWSアカウントではワーカー ノードのみを配置 Private Link VPC End Point Service Red Hat の AWS アカウント 利用者の AWS アカウント Control Plane Availability zone (x3)
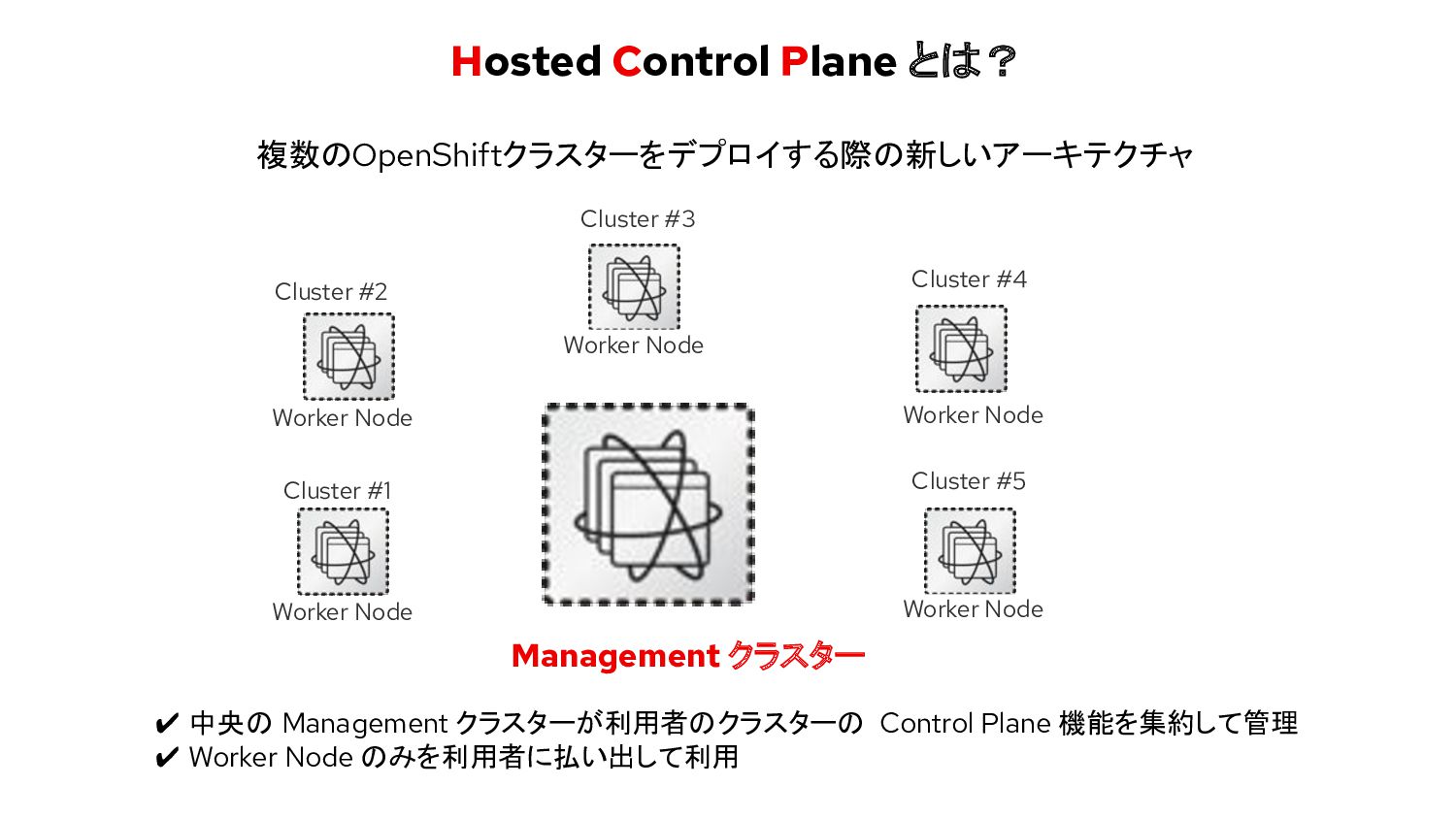
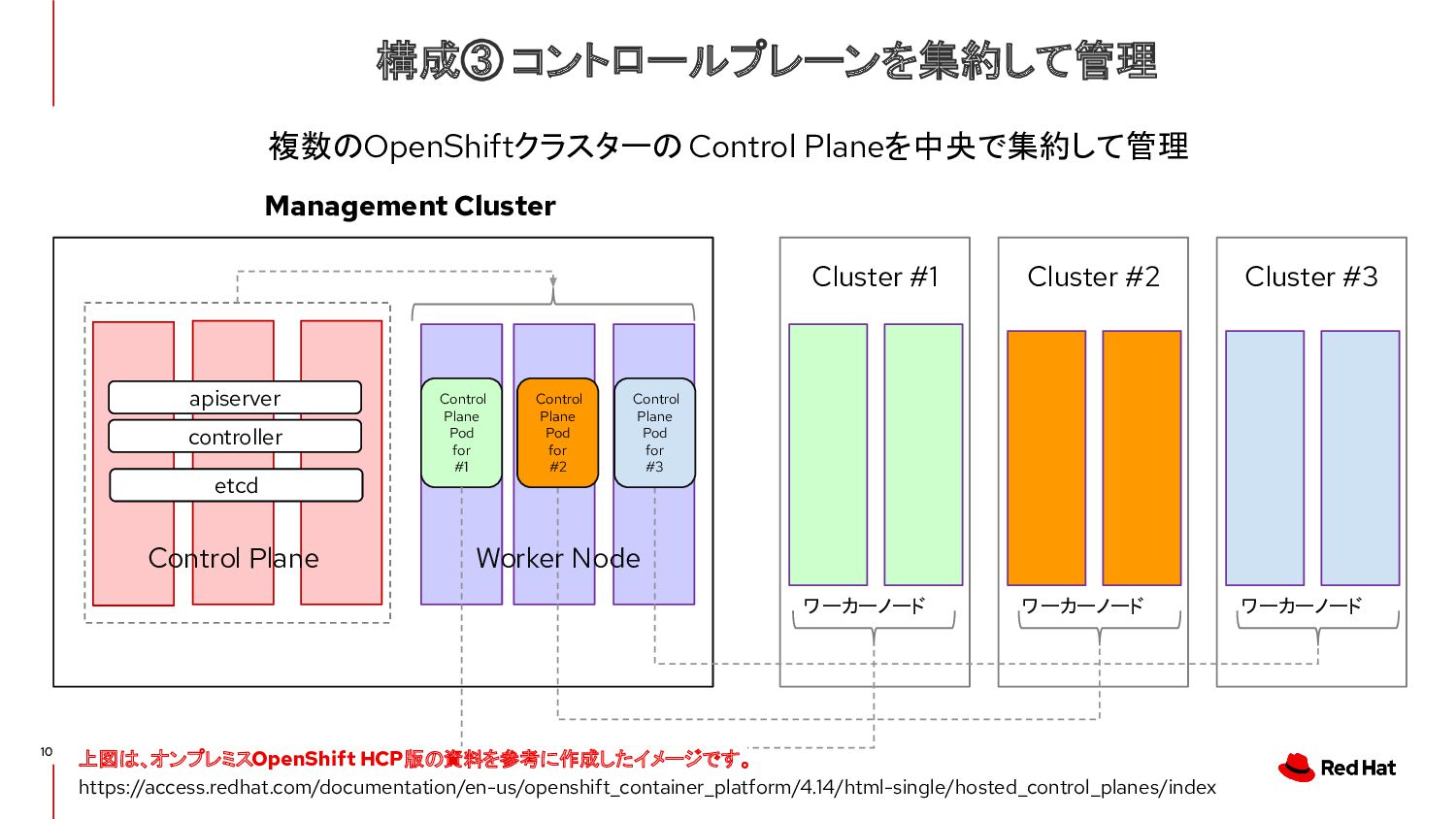
#2 ワーカーノード Cluster #3 ワーカーノード 構成③ コントロールプレーンを集約して管理 Control Plane Pod for #2 Control Plane Pod for #3 複数のOpenShiftクラスターの Control Planeを中央で集約して管理 etcd controller apiserver Management Cluster Control Plane Worker Node 上図は、オンプレミスOpenShift HCP版の資料を参考に作成したイメージです。 https://access.redhat.com/documentation/en-us/openshift_container_platform/4.14/html-single/hosted_control_planes/index
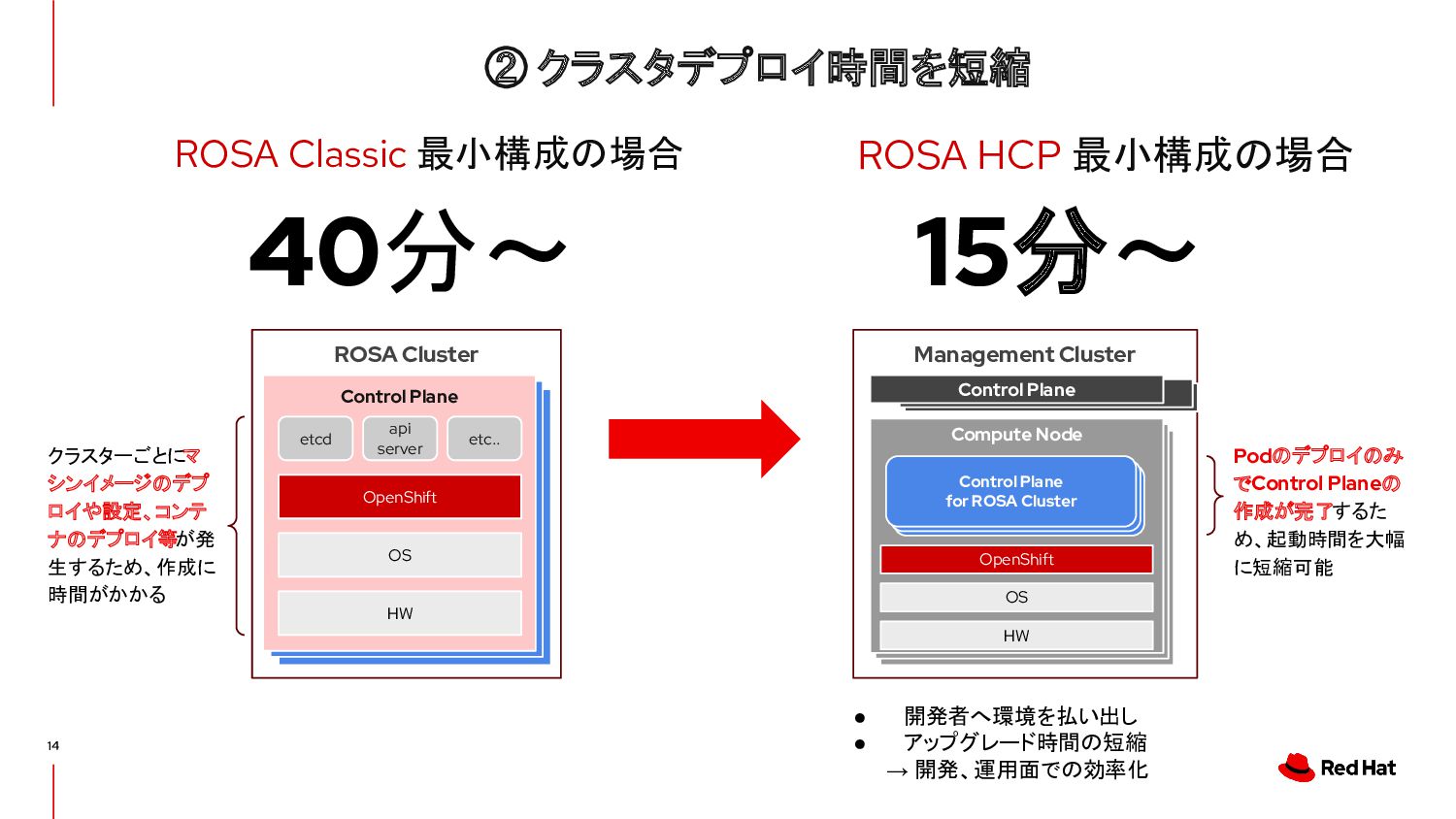
最小構成の場合 Management Cluster ROSA Cluster Control Plane Control Plane Control Plane HW OS OpenShift etcd api server etc.. Control Plane Compute Node Control Plane for ROSA Cluster HW OpenShift OS クラスターごとにマ シンイメージのデプ ロイや設定、コンテ ナのデプロイ等が発 生するため、作成に 時間がかかる Podのデプロイのみ でControl Planeの 作成が完了するた め、起動時間を大幅 に短縮可能 • 開発者へ環境を払い出し • アップグレード時間の短縮 → 開発、運用面での効率化
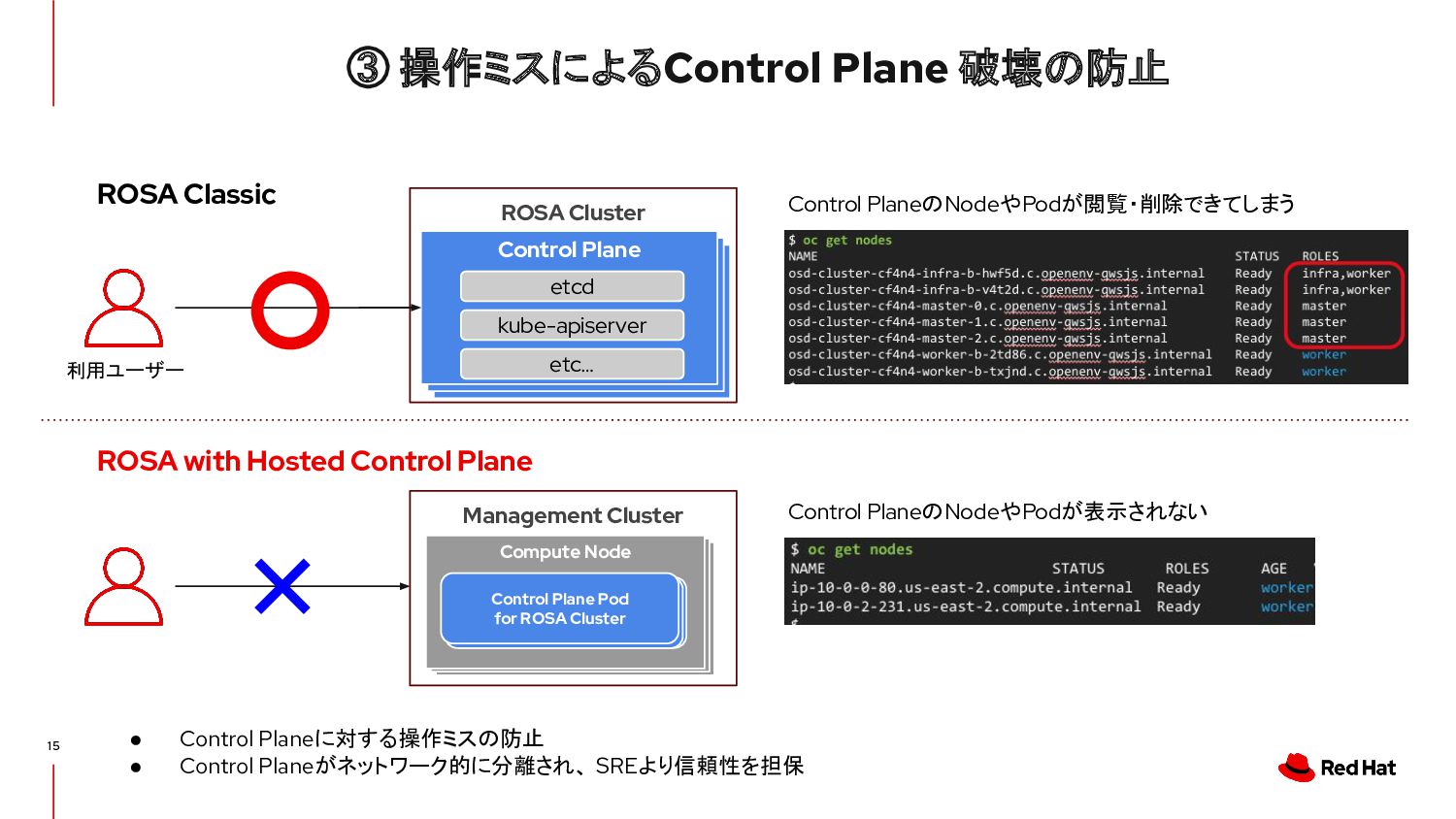
PlaneのNodeやPodが表示されない Control Plane kube-apiserver etcd etc… ROSA Classic ROSA with Hosted Control Plane Management Cluster Compute Node Control Plane Pod for ROSA Cluster 利用ユーザー • Control Planeに対する操作ミスの防止 • Control Planeがネットワーク的に分離され、 SREより信頼性を担保
Red Hat OpenShift Service on AWS (ROSA) hands-on experience “hands-on experience” の特徴 • 実際のROSA HCP環境を使用してのハンズオンを提供します • 申し込み後、即時にハンズオン環境が払い出されます • 1つのRed Hat アカウントあたり、8時間×3回まで申し込みいただけます ご用意いただくもの • 申し込みいただく方のRed Hat ID をご用意ください • インターネットアクセス可能なPC環境(Webブラウザーを使用) 注意事項 • ROSA環境は、Red Hat が所有する環境となります • 機密性の高い情報資産の取扱いにはご注意ください https://red.ht/498N6ql お申し込みはこちらから セルフサービスでお試しいただけます
leading provider of enterprise open source software solutions. Award-winning support, training, and consulting services make Red Hat a trusted adviser to the Fortune 500. Thank you
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}