Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
107年度控制學門業務簡報
Search
Hill
November 06, 2018
Education
2.1k
0
Share
107年度控制學門業務簡報
科技部工程司控制學門召集人中興大學電機學系林俊良教授將分別針對科技部工程司與控制學門之規劃發展方向發表演說報告。
Hill
November 06, 2018
Other Decks in Education
See All in Education
Protecting Patrons with Digital Vendors
dsalo
0
110
P3NFEST 2026 Spring ハンズオン「ハッキング・ラブ!はじめてのハッキングをやってみよう」資料
nomizone
0
450
Integrating prosody into reading comprehension: A high school classroom practice
otamayuzak
0
110
Modelamiento Matematico (Ingresantes UNI 2026)
robintux
0
270
Fulbright DAI 2025 學人經驗分享
joannie
0
830
リモートリポジトリの操作 / 02-c-remote
kaityo256
PRO
0
160
バージョン管理とは / 01-a-vcs
kaityo256
PRO
1
320
The Art & Science of Elearning
tmiket
1
190
演習:GitHubの基本操作 / 06-github-basic
kaityo256
PRO
1
310
吉祥寺.pmは1つじゃない — 複数イベント並走運営の12年 —
magnolia
0
580
「機械学習と因果推論」入門 ② 回帰分析から因果分析へ
masakat0
0
640
小さなまちで始める デジタル創作の居場所〜すべての子どもが創造的に未来を描ける社会へ〜
codeforeveryone
0
470
Featured
See All Featured
Designing for Timeless Needs
cassininazir
0
220
Code Reviewing Like a Champion
maltzj
528
40k
The AI Search Optimization Roadmap by Aleyda Solis
aleyda
1
5.7k
Context Engineering - Making Every Token Count
addyosmani
9
860
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Sam Torres - BigQuery for SEOs
techseoconnect
PRO
0
260
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.2k
XXLCSS - How to scale CSS and keep your sanity
sugarenia
250
1.3M
CoffeeScript is Beautiful & I Never Want to Write Plain JavaScript Again
sstephenson
162
16k
Practical Tips for Bootstrapping Information Extraction Pipelines
honnibal
25
1.9k
Put a Button on it: Removing Barriers to Going Fast.
kastner
60
4.3k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
1.9k
Transcript
科技部工程司控制學門 業務簡報 林俊良 學門召集人 107年11月6日
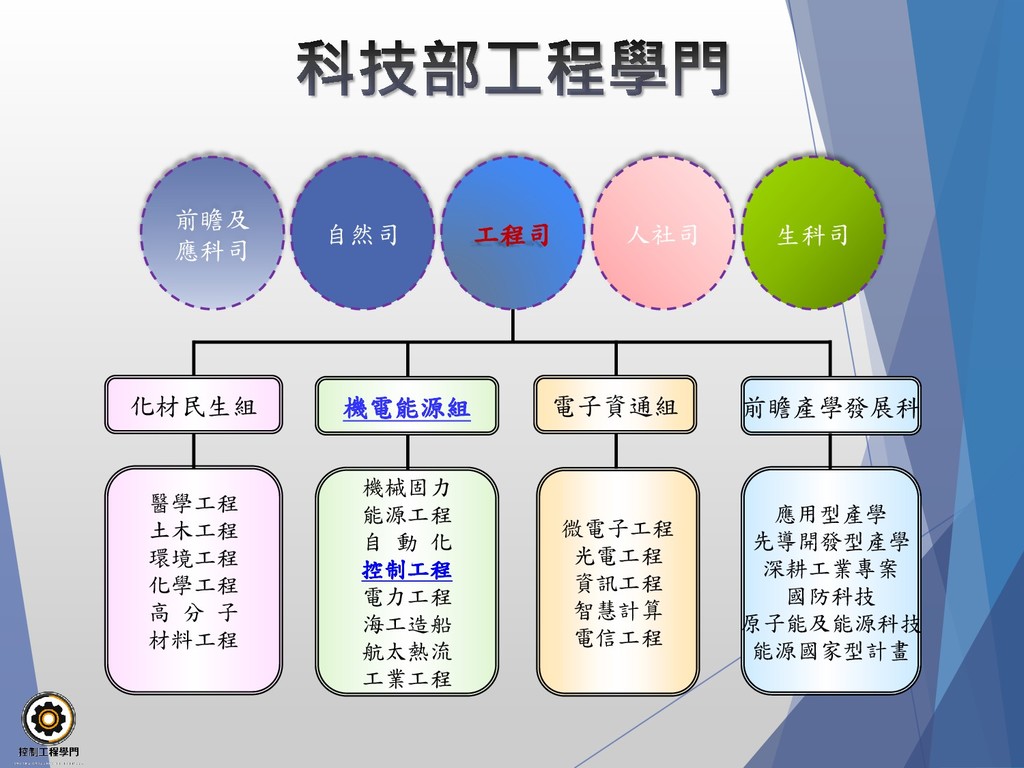
化材民生組 機電能源組 電子資通組 醫學工程 土木工程 環境工程 化學工程 高 分 子
材料工程 機械固力 能源工程 自 動 化 控制工程 電力工程 海工造船 航太熱流 工業工程 微電子工程 光電工程 資訊工程 智慧計算 電信工程 應用型產學 先導開發型產學 深耕工業專案 國防科技 原子能及能源科技 能源國家型計畫 前瞻產學發展科 前瞻及 應科司 自然司 工程司 人社司 生科司
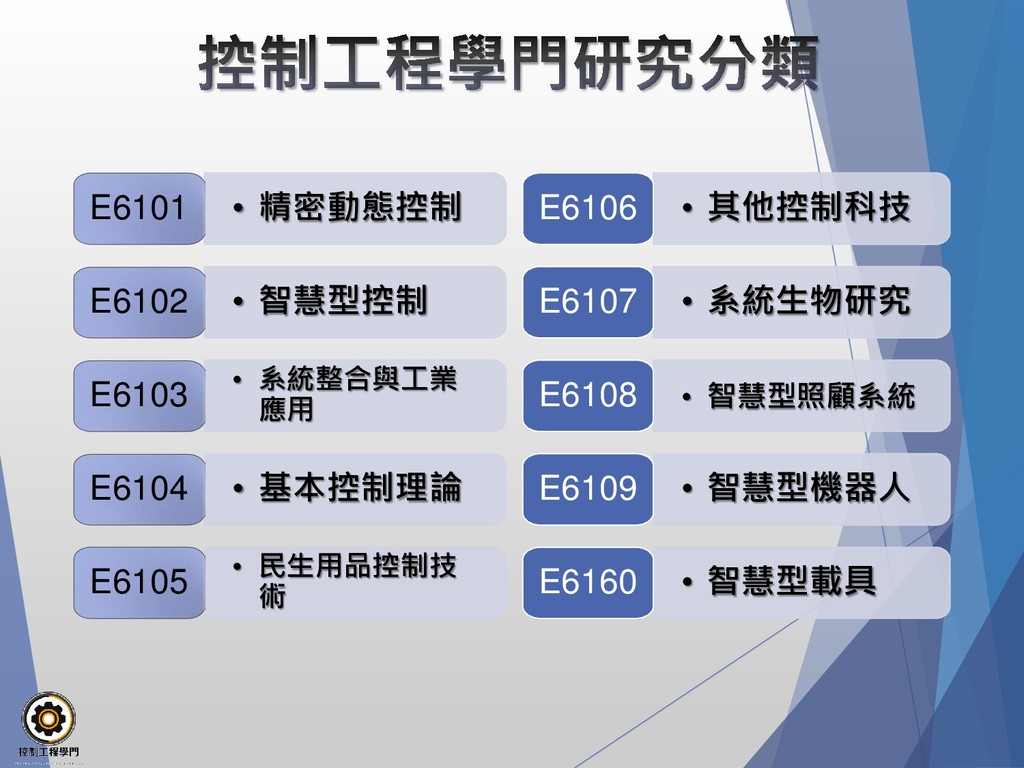
• 精密動態控制 E6101 • 智慧型控制 E6102 • 系統整合與工業 應用 E6103
• 基本控制理論 E6104 • 民生用品控制技 術 E6105 • 其他控制科技 E6106 • 系統生物研究 E6107 • 智慧型照顧系統 E6108 • 智慧型機器人 E6109 • 智慧型載具 E6160
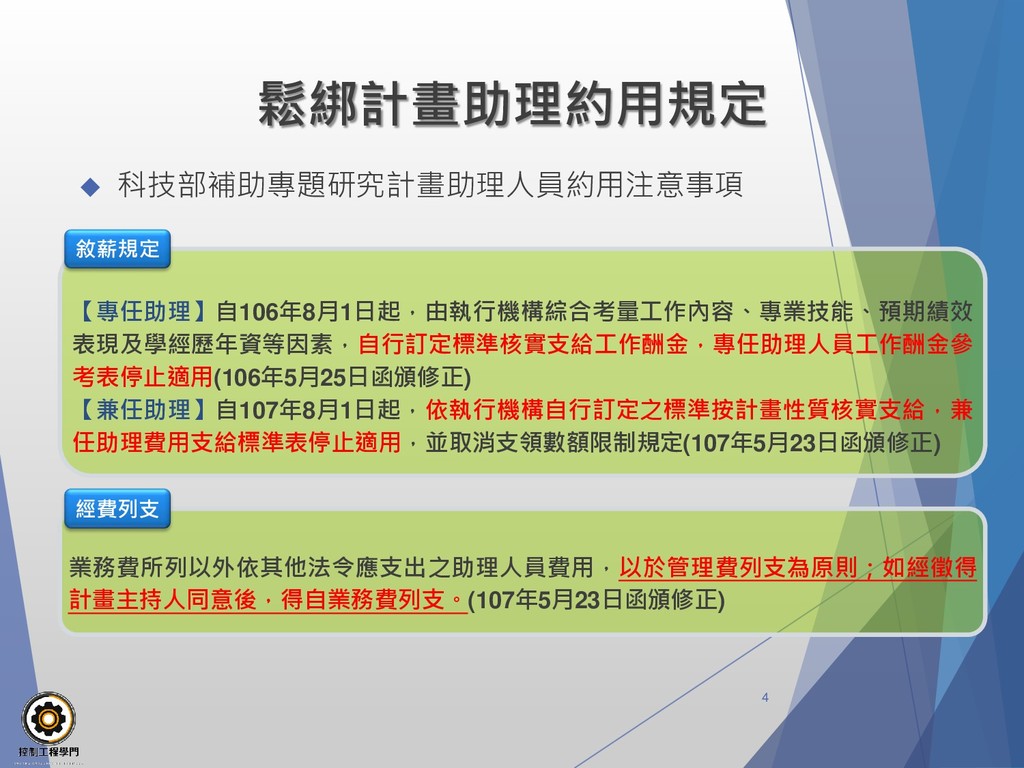
鬆綁計畫助理約用規定 科技部補助專題研究計畫助理人員約用注意事項 【專任助理】自106年8月1日起,由執行機構綜合考量工作內容、專業技能、預期績效 表現及學經歷年資等因素,自行訂定標準核實支給工作酬金,專任助理人員工作酬金參 考表停止適用(106年5月25日函頒修正) 【兼任助理】自107年8月1日起,依執行機構自行訂定之標準按計畫性質核實支給,兼 任助理費用支給標準表停止適用,並取消支領數額限制規定(107年5月23日函頒修正) 敘薪規定 業務費所列以外依其他法令應支出之助理人員費用,以於管理費列支為原則;如經徵得
計畫主持人同意後,得自業務費列支。(107年5月23日函頒修正) 經費列支 4
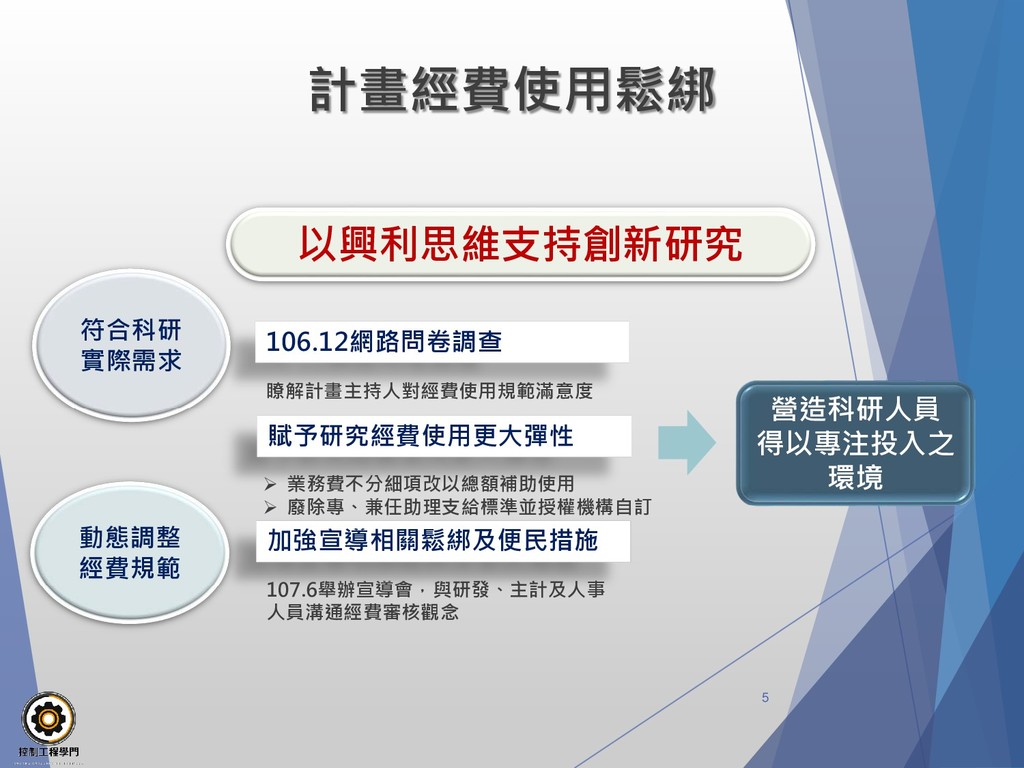
計畫經費使用鬆綁 營造科研人員 得以專注投入之 環境 賦予研究經費使用更大彈性 加強宣導相關鬆綁及便民措施 106.12網路問卷調查 動態調整 經費規範 符合科研
實際需求 以興利思維支持創新研究 瞭解計畫主持人對經費使用規範滿意度 業務費不分細項改以總額補助使用 廢除專、兼任助理支給標準並授權機構自訂 107.6舉辦宣導會,與研發、主計及人事 人員溝通經費審核觀念 5
專題研究計畫 審查程序及注意事項
補助大專院校及學術研究機構執行科學技術研究工作,以提 升我國科技研發水準,培育人才。 公私立大專院校及公立研究機構機編制內之專任教學、研究 人員。 具博士學位之專任教學或研究人員 研究機構副研究員、技正以上人員
教學醫院主治醫師二年以上人員 第一次新任教學研究人員,其資格符合規定,且從未申請本 會研究計畫者,於起聘之日起一年內以隨到隨審方式提出, 並以申請一件為限。
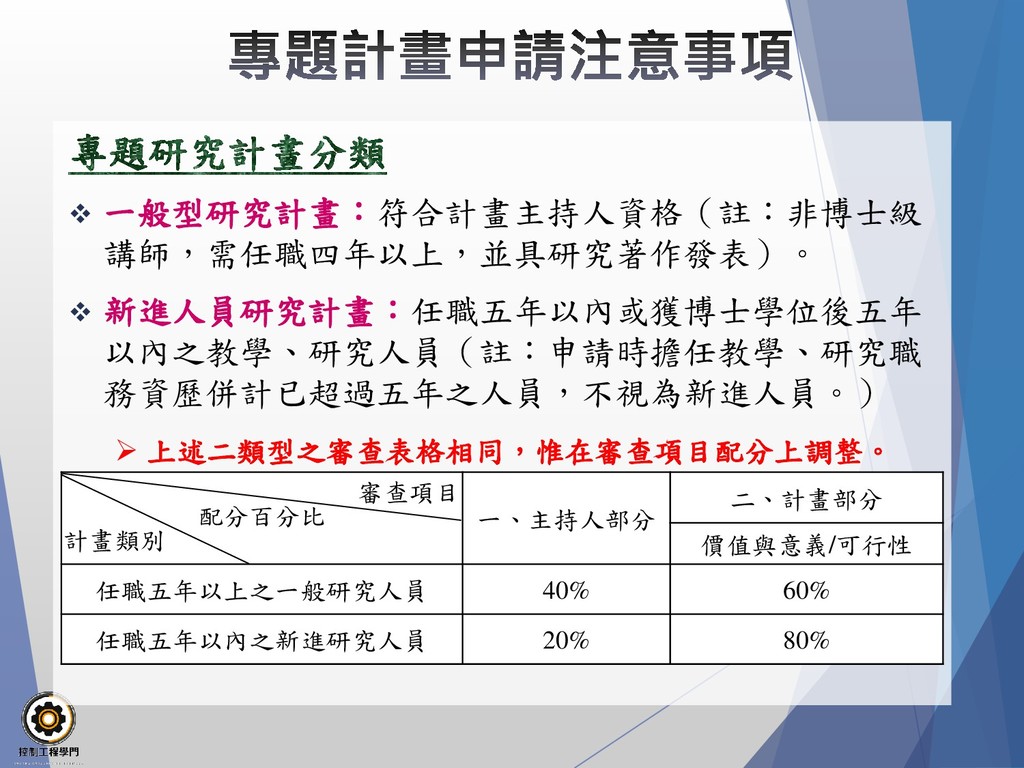
一般型研究計畫:符合計畫主持人資格(註:非博士級 講師,需任職四年以上,並具研究著作發表)。 新進人員研究計畫:任職五年以內或獲博士學位後五年 以內之教學、研究人員(註:申請時擔任教學、研究職 務資歷併計已超過五年之人員,不視為新進人員。) 上述二類型之審查表格相同,惟在審查項目配分上調整。 審查項目
配分百分比 計畫類別 一、主持人部分 二、計畫部分 價值與意義/可行性 任職五年以上之一般研究人員 40% 60% 任職五年以內之新進研究人員 20% 80%
個別型研究計畫 整合型研究計畫 包括總計畫及子計畫,總計畫主持人必須主持子計畫。由各主持人服 務單位送出計畫書申請。 整合型計畫成立必要條件:整合型計畫之子計畫件數必須超過2/3獲 推薦,且須有3件子計畫以上。(含3件)
整合型計畫適合由研究績效較佳者組成研究團隊,並作較長期與深入性的研究,資淺者以共同主持 人的身份參與子計畫,整合型計畫才較易成形。 整合型總計畫以審查子計畫間是否相關和必要性以及彼此之整合情形為主,故審查表格與個別型審 查表格不同。 整合型計畫各子計畫申請時均標示為第一優先較易成功。 單一整合型研究計畫 由總主持人統整全部子項工作(三位以上總子計畫主持人)之內容與經 費,由總主持人之服務機關提出計畫申請。計畫通過後,不得要求分 撥經費至共同主持人之服務機關。
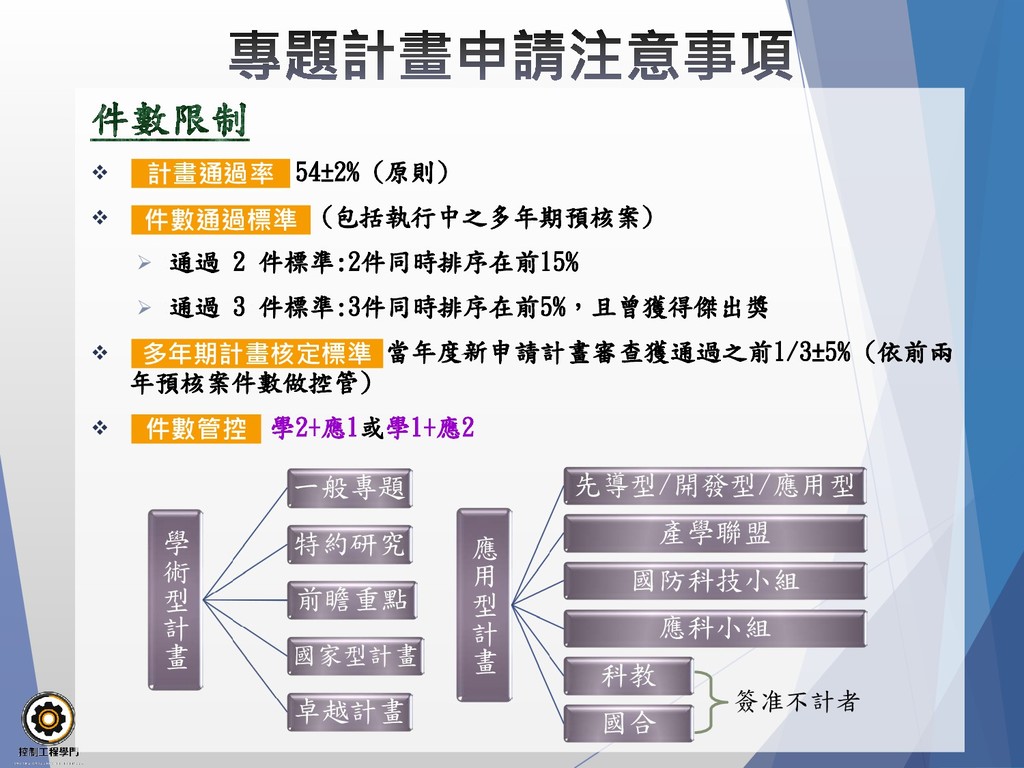
54±2% (原則) (包括執行中之多年期預核案) 通過 2 件標準:2件同時排序在前15%
通過 3 件標準:3件同時排序在前5%,且曾獲得傑出獎 當年度新申請計畫審查獲通過之前1/3±5% (依前兩 年預核案件數做控管) 學2+應1或學1+應2 應 用 型 計 畫 先導型/開發型/應用型 產學聯盟 國防科技小組 應科小組 科教 國合 簽准不計者 學 術 型 計 畫 一般專題 特約研究 前瞻重點 國家型計畫 卓越計畫 計畫通過率 件數通過標準 多年期計畫核定標準 件數管控
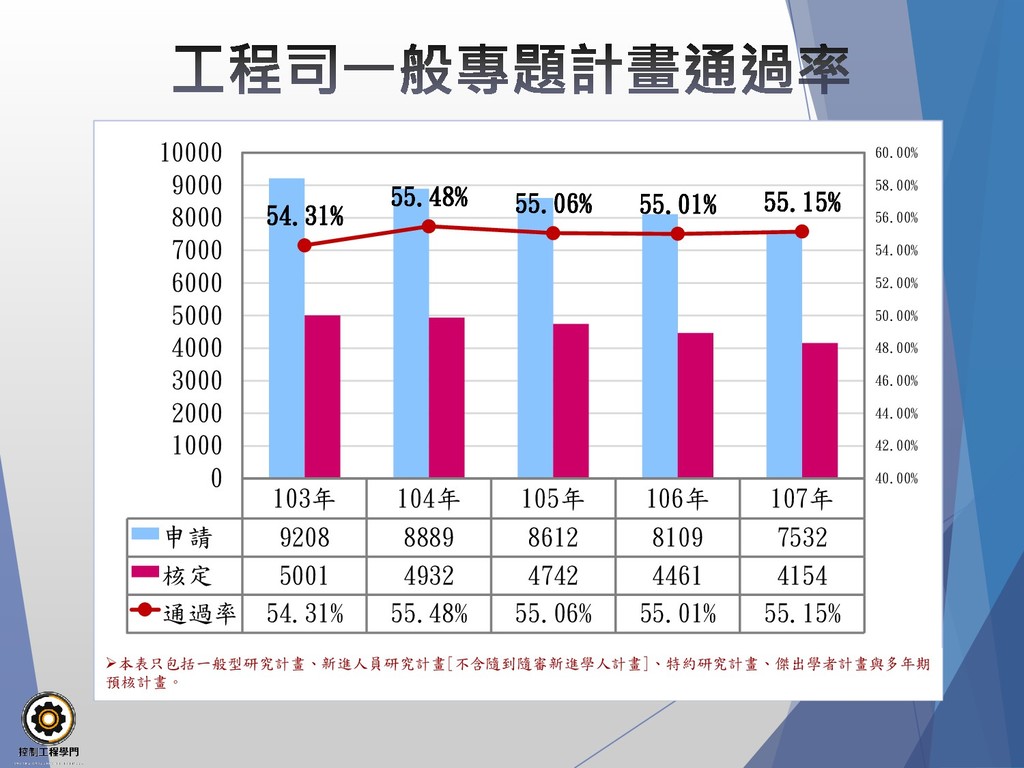
103年 104年 105年 106年 107年 申請 9208 8889 8612 8109
7532 核定 5001 4932 4742 4461 4154 通過率 54.31% 55.48% 55.06% 55.01% 55.15% 54.31% 55.48% 55.06% 55.01% 55.15% 40.00% 42.00% 44.00% 46.00% 48.00% 50.00% 52.00% 54.00% 56.00% 58.00% 60.00% 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 本表只包括一般型研究計畫、新進人員研究計畫[不含隨到隨審新進學人計畫]、特約研究計畫、傑出學者計畫與多年期 預核計畫。
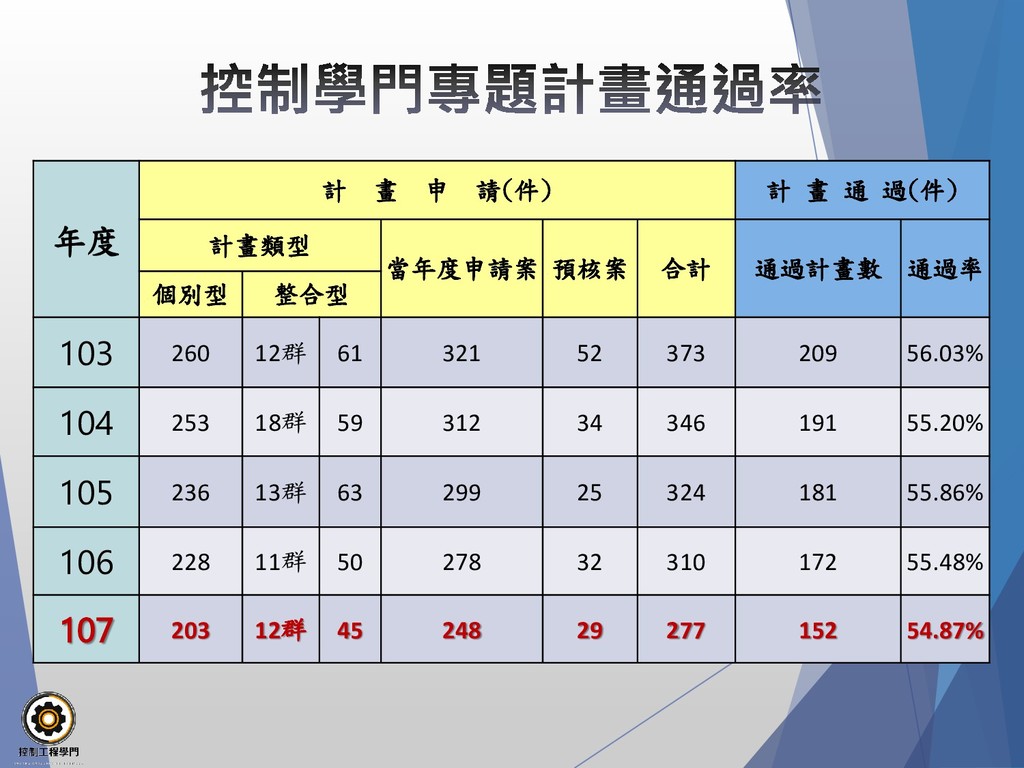
年度 計 畫 申 請(件) 計 畫 通 過(件) 計畫類型
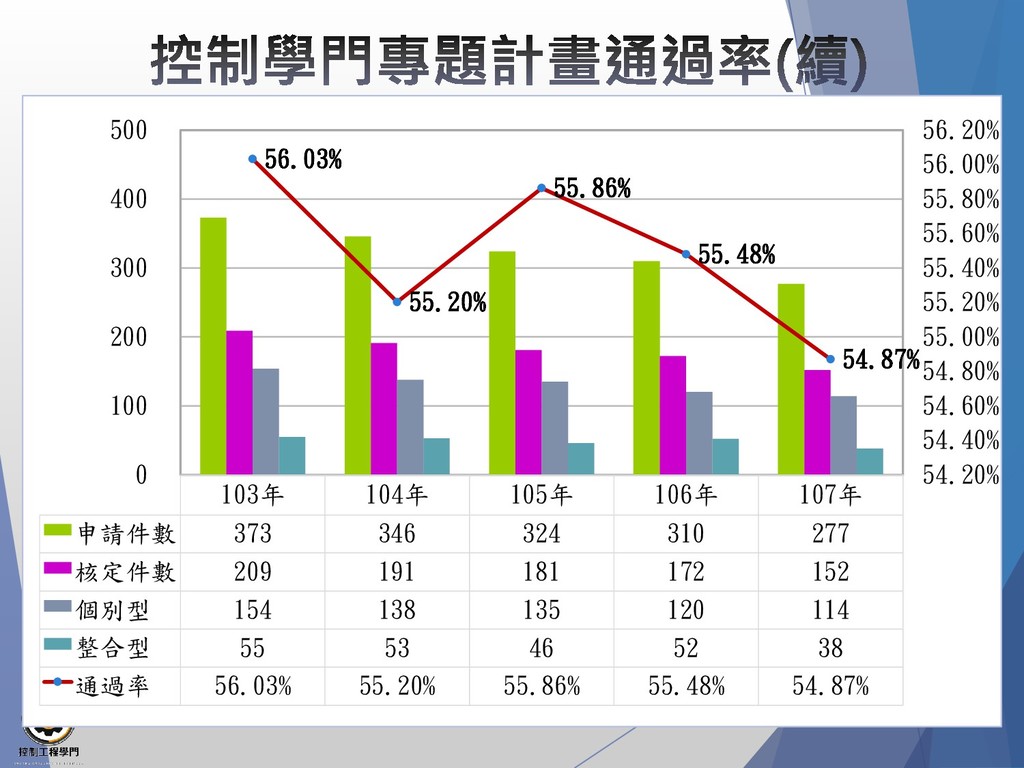
當年度申請案 預核案 合計 通過計畫數 通過率 個別型 整合型 103 260 12群 61 321 52 373 209 56.03% 104 253 18群 59 312 34 346 191 55.20% 105 236 13群 63 299 25 324 181 55.86% 106 228 11群 50 278 32 310 172 55.48% 107 203 12群 45 248 29 277 152 54.87%
103年 104年 105年 106年 107年 申請件數 373 346 324 310
277 核定件數 209 191 181 172 152 個別型 154 138 135 120 114 整合型 55 53 46 52 38 通過率 56.03% 55.20% 55.86% 55.48% 54.87% 56.03% 55.20% 55.86% 55.48% 54.87% 54.20% 54.40% 54.60% 54.80% 55.00% 55.20% 55.40% 55.60% 55.80% 56.00% 56.20% 0 100 200 300 400 500
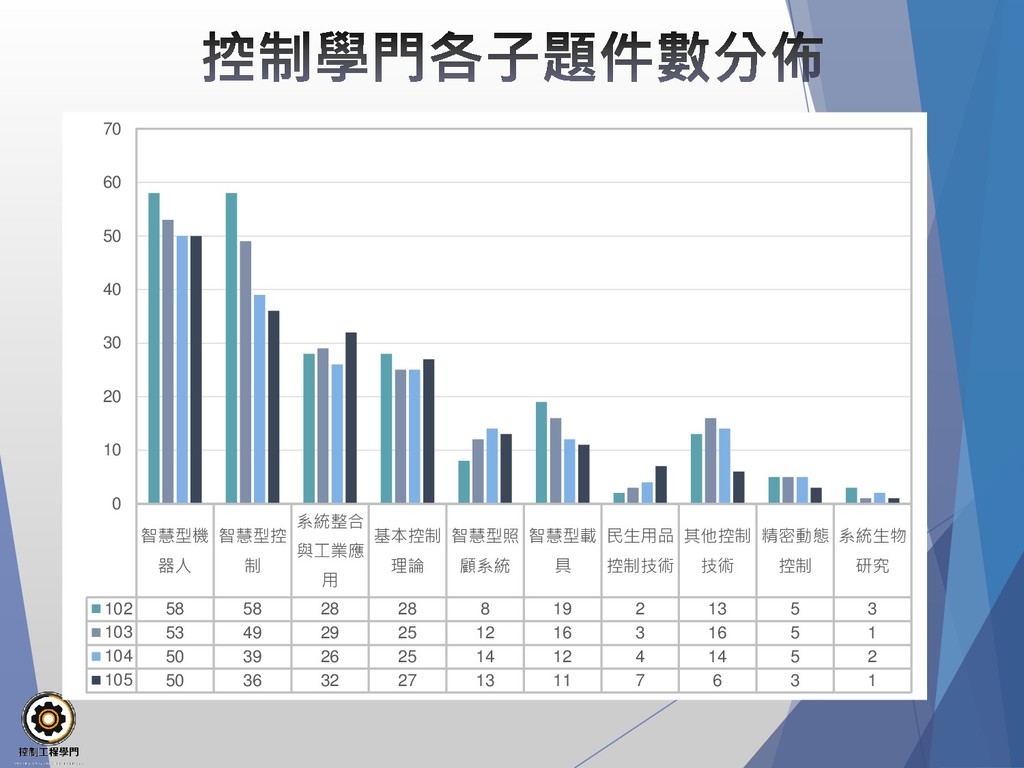
智慧型機 器人 智慧型控 制 系統整合 與工業應 用 基本控制 理論 智慧型照
顧系統 智慧型載 具 民生用品 控制技術 其他控制 技術 精密動態 控制 系統生物 研究 102 58 58 28 28 8 19 2 13 5 3 103 53 49 29 25 12 16 3 16 5 1 104 50 39 26 25 14 12 4 14 5 2 105 50 36 32 27 13 11 7 6 3 1 0 10 20 30 40 50 60 70
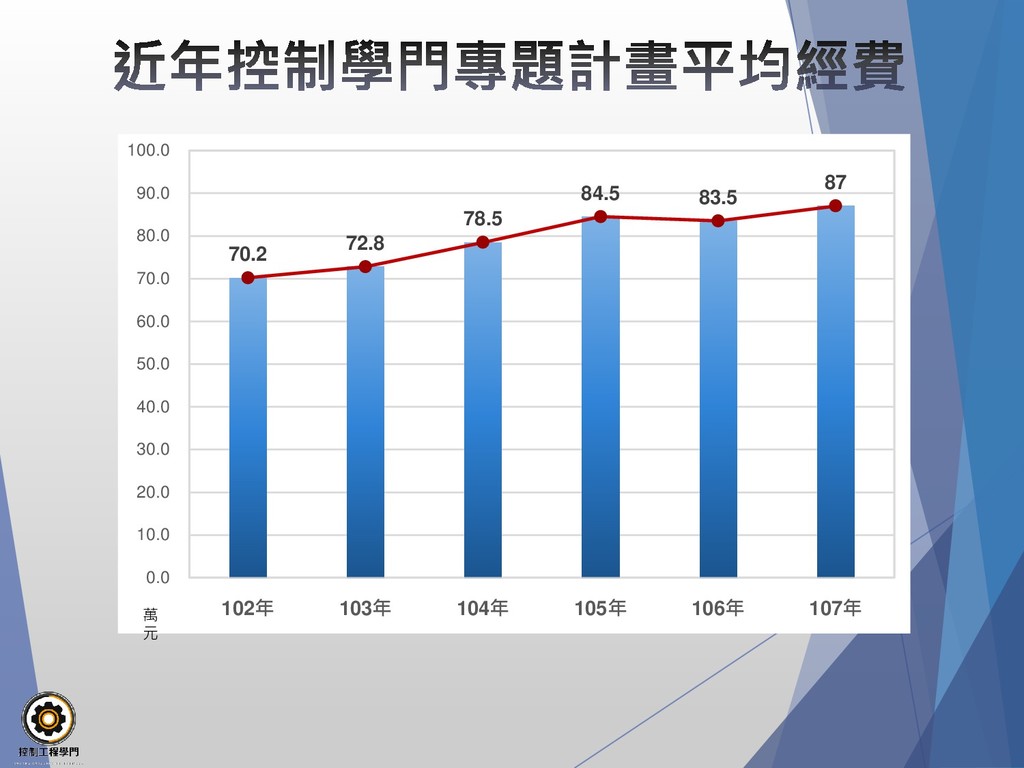
70.2 72.8 78.5 84.5 83.5 87 0.0 10.0 20.0 30.0
40.0 50.0 60.0 70.0 80.0 90.0 100.0 102年 103年 104年 105年 106年 107年 萬 元
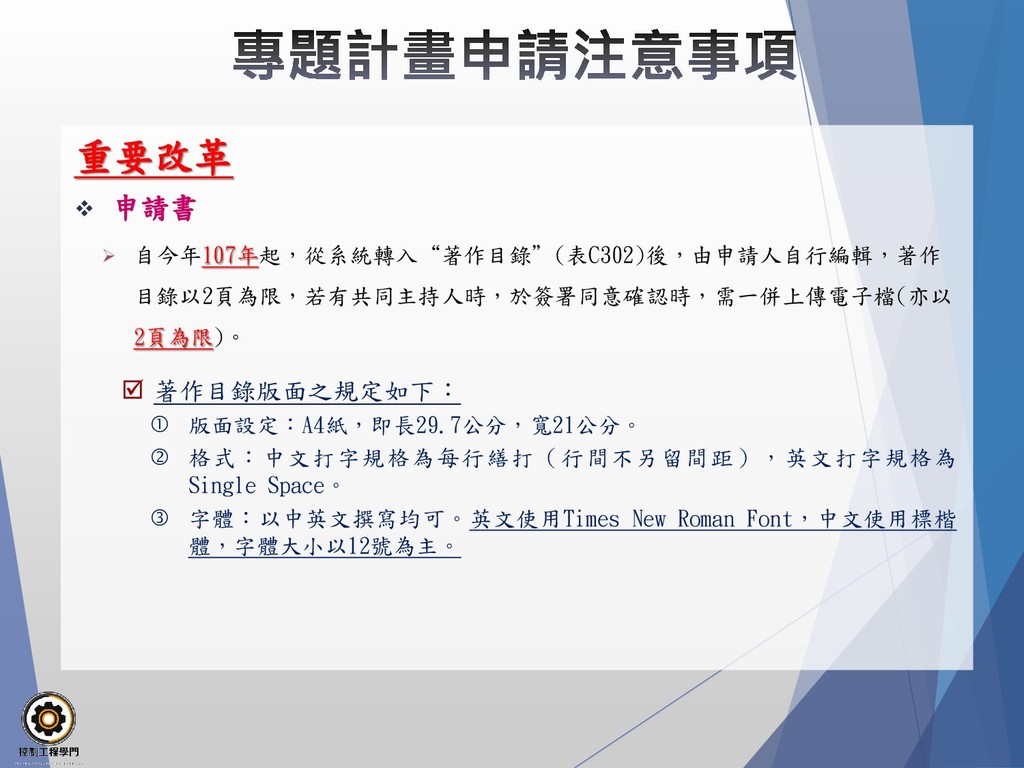
重要改革 申請書 自今年107年起,從系統轉入“著作目錄”(表C302)後,由申請人自行編輯,著作 目錄以2頁為限,若有共同主持人時,於簽署同意確認時,需一併上傳電子檔(亦以 2頁為限)。 著作目錄版面之規定如下:
版面設定:A4紙,即長29.7公分,寬21公分。 格式:中文打字規格為每行繕打(行間不另留間距),英文打字規格為 Single Space。 字體:以中英文撰寫均可。英文使用Times New Roman Font,中文使用標楷 體,字體大小以12號為主。
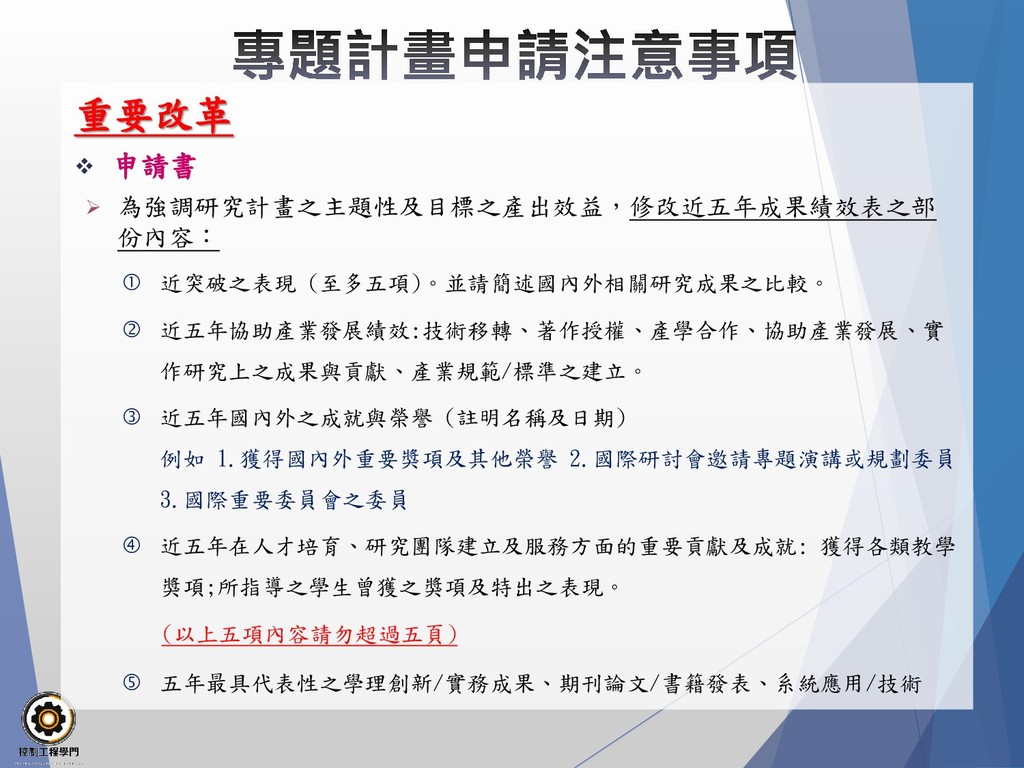
重要改革 申請書 為強調研究計畫之主題性及目標之產出效益,修改近五年成果績效表之部 份內容: 近突破之表現 (至多五項)。並請簡述國內外相關研究成果之比較。
近五年協助產業發展績效:技術移轉、著作授權、產學合作、協助產業發展、實 作研究上之成果與貢獻、產業規範/標準之建立。 近五年國內外之成就與榮譽 (註明名稱及日期) 例如 1.獲得國內外重要獎項及其他榮譽 2.國際研討會邀請專題演講或規劃委員 3.國際重要委員會之委員 近五年在人才培育、研究團隊建立及服務方面的重要貢獻及成就: 獲得各類教學 獎項;所指導之學生曾獲之獎項及特出之表現。 (以上五項內容請勿超過五頁) 五年最具代表性之學理創新/實務成果、期刊論文/書籍發表、系統應用/技術
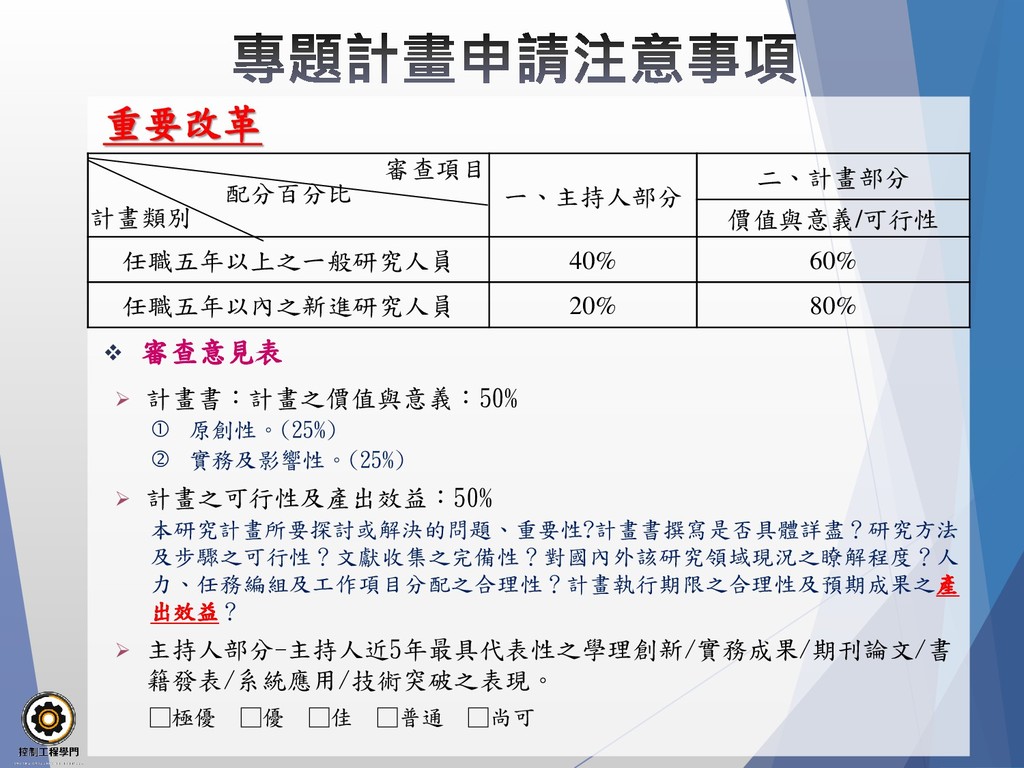
重要改革 審查意見表 計畫書:計畫之價值與意義:50% 原創性。(25%) 實務及影響性。(25%)
計畫之可行性及產出效益:50% 本研究計畫所要探討或解決的問題、重要性?計畫書撰寫是否具體詳盡?研究方法 及步驟之可行性?文獻收集之完備性?對國內外該研究領域現況之瞭解程度?人 力、任務編組及工作項目分配之合理性?計畫執行期限之合理性及預期成果之產 出效益? 主持人部分-主持人近5年最具代表性之學理創新/實務成果/期刊論文/書 籍發表/系統應用/技術突破之表現。 □極優 □優 □佳 □普通 □尚可 審查項目 配分百分比 計畫類別 一、主持人部分 二、計畫部分 價值與意義/可行性 任職五年以上之一般研究人員 40% 60% 任職五年以內之新進研究人員 20% 80%
隨大批專題計畫提出申請 一般專題研究 (或專案)計畫 自由型MAGIC 國際合作加值經費 雙邊協議型MAGIC 國際合作擴充加值 雙邊/多邊協議大型 國際合作研究計畫 不限國家,
隨時受理 依雙邊協議徵件時間 國際徵件時間 (非add-on) 國際合作加值 MAGIC 方案 刻正執行本部補助研究類計畫(以下簡稱「原計 畫」),不包含規劃推動及產學合作計畫。 計畫主持人應於擬進行國際合作開始日期之3個 月前提出申請,且「原計畫」執行期間至少應餘 7個月以上。 補助經費以不超過原計畫經費之50%為原則,包 含:(一)研究主持費(主動增核新臺幣5,000元/月, 但不超過25,000元/月),(二)赴國外差旅費,(三) 邀請國外學者來台經費,(四)業務費。
產學合作計畫
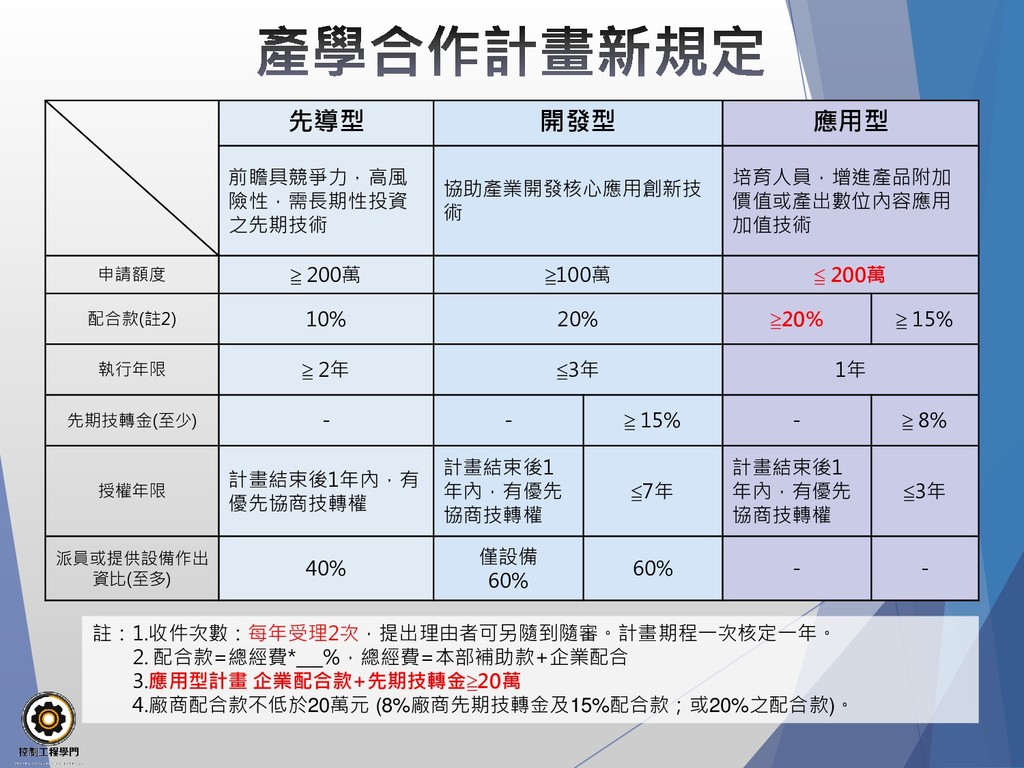
先導型 開發型 應用型 前瞻具競爭力,高風 險性,需長期性投資 之先期技術 協助產業開發核心應用創新技 術 培育人員,增進產品附加 價值或產出數位內容應用
加值技術 申請額度 ≧ 200萬 ≧100萬 ≦ 200萬 配合款(註2) 10% 20% ≧20% ≧ 15% 執行年限 ≧ 2年 ≦3年 1年 先期技轉金(至少) - - ≧ 15% - ≧ 8% 授權年限 計畫結束後1年內,有 優先協商技轉權 計畫結束後1 年內,有優先 協商技轉權 ≦7年 計畫結束後1 年內,有優先 協商技轉權 ≦3年 派員或提供設備作出 資比(至多) 40% 僅設備 60% 60% - - 註:1.收件次數:每年受理2次,提出理由者可另隨到隨審。計畫期程一次核定一年。 2. 配合款=總經費*___%,總經費=本部補助款+企業配合 3.應用型計畫 企業配合款+先期技轉金≧20萬 4.廠商配合款不低於20萬元 (8%廠商先期技轉金及15%配合款;或20%之配合款)。
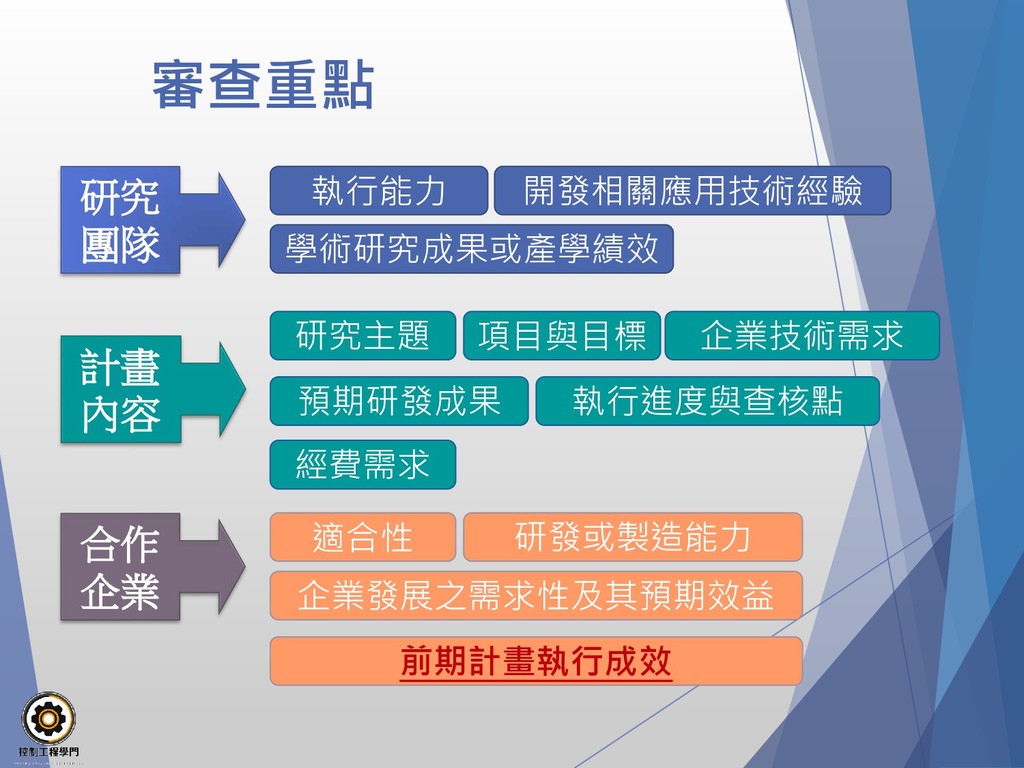
審查重點 研究 團隊 計畫 內容 合作 企業 執行能力 開發相關應用技術經驗 學術研究成果或產學績效
研究主題 項目與目標 企業技術需求 預期研發成果 執行進度與查核點 經費需求 適合性 研發或製造能力 企業發展之需求性及其預期效益 前期計畫執行成效
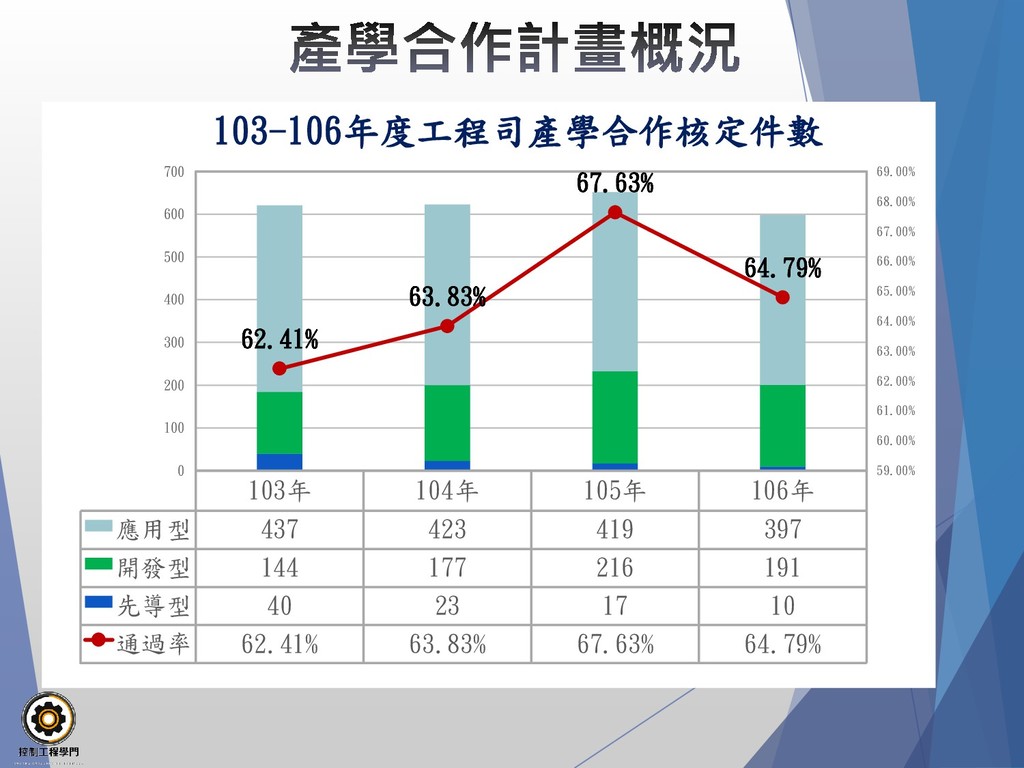
102-104年度工程司產學合作核定件數 103年 104年 105年 106年 應用型 437 423 419 397
開發型 144 177 216 191 先導型 40 23 17 10 通過率 62.41% 63.83% 67.63% 64.79% 62.41% 63.83% 67.63% 64.79% 59.00% 60.00% 61.00% 62.00% 63.00% 64.00% 65.00% 66.00% 67.00% 68.00% 69.00% 0 100 200 300 400 500 600 700 103-106年度工程司產學合作核定件數
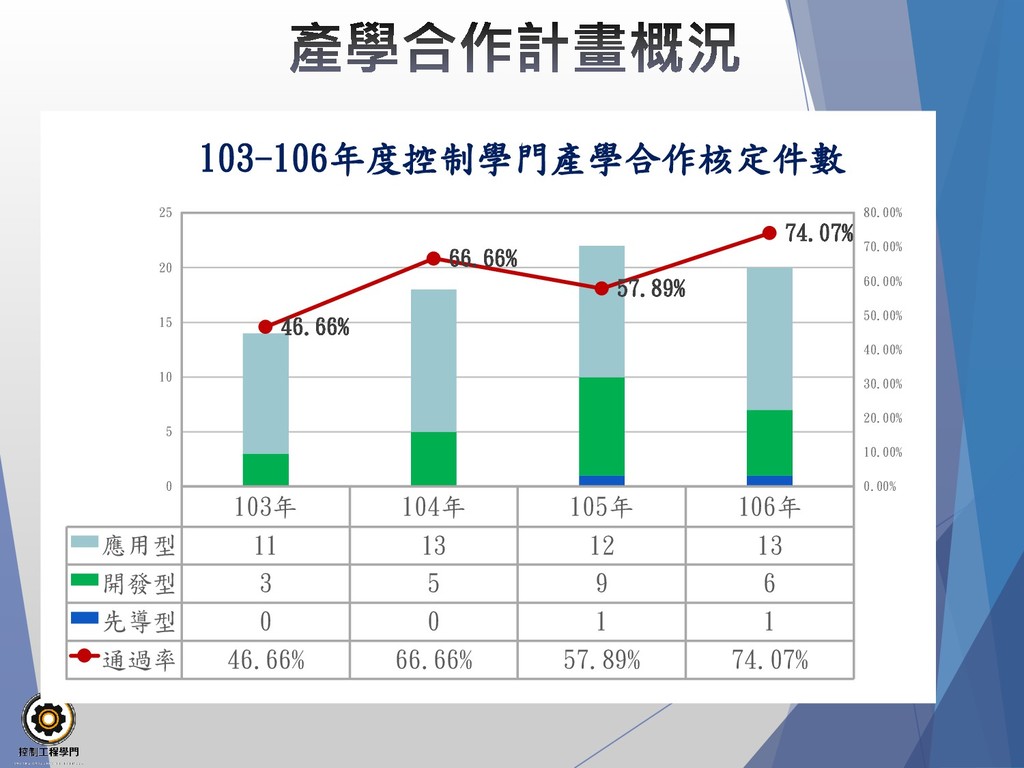
103年 104年 105年 106年 應用型 11 13 12 13 開發型
3 5 9 6 先導型 0 0 1 1 通過率 46.66% 66.66% 57.89% 74.07% 46.66% 66.66% 57.89% 74.07% 0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00% 80.00% 0 5 10 15 20 25 103-106年度控制學門產學合作核定件數
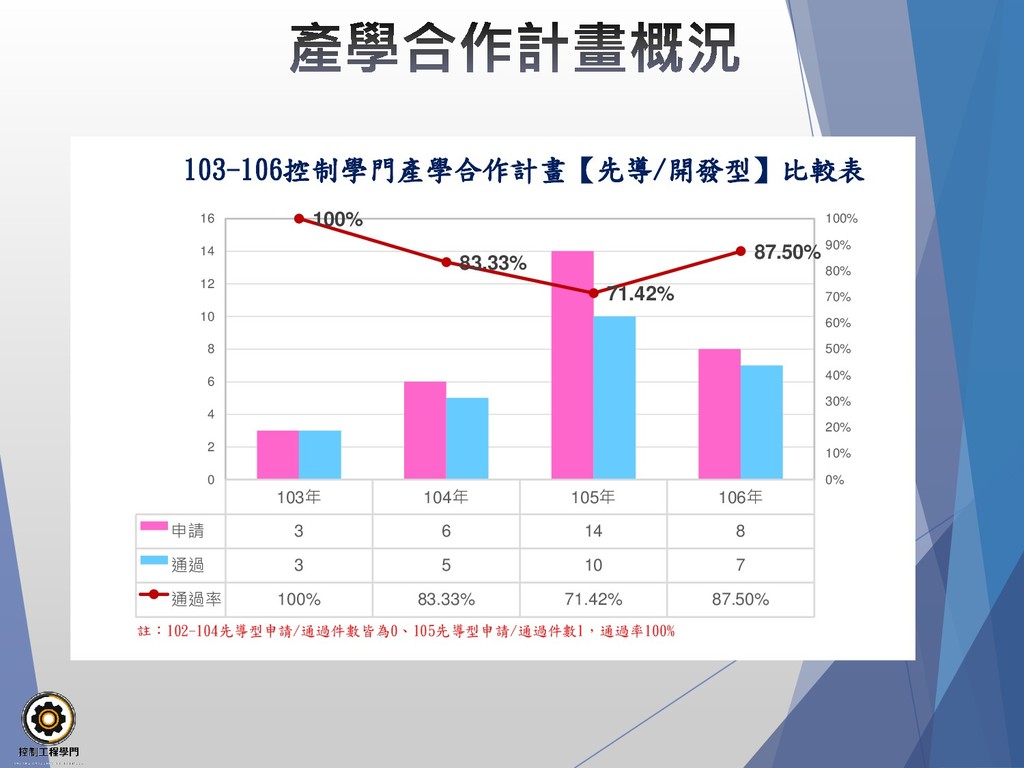
103年 104年 105年 106年 申請 3 6 14 8 通過
3 5 10 7 通過率 100% 83.33% 71.42% 87.50% 100% 83.33% 71.42% 87.50% 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 0 2 4 6 8 10 12 14 16 103-106控制學門產學合作計畫【先導/開發型】比較表 註:102-104先導型申請/通過件數皆為0、105先導型申請/通過件數1,通過率100%
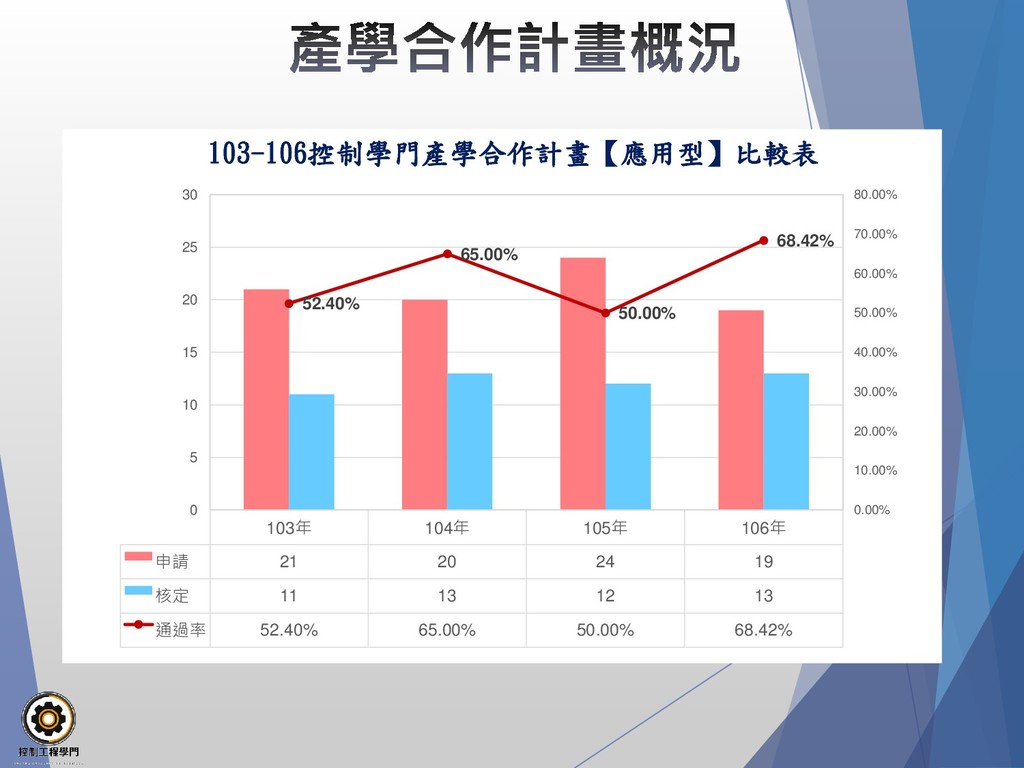
103年 104年 105年 106年 申請 21 20 24 19 核定
11 13 12 13 通過率 52.40% 65.00% 50.00% 68.42% 52.40% 65.00% 50.00% 68.42% 0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00% 80.00% 0 5 10 15 20 25 30 103-106控制學門產學合作計畫【應用型】比較表
(Academic Research Results Industrialization and Values Enhancement) 加速3D1C(Discovery、Development、Delivery、Commercialization)進程與科研產業化 以執行中研究計畫,吸引企業挹注資金額外進行產學合作研究,同時本部追加經
費,激勵基礎研究人才將學術研究鏈結產業需求,留住一流人才在臺打拼 在校學生參與產業解題,深耕所需基礎技術,創造未來就業或深造的價值 目的 方案重點及預期效益 執行中 研究計畫 企業挹注 產學合作 追加研究 計畫經費 創造 科研價值 企業挹注金: 一般領域≥60萬元/年 人文領域≥20萬元/年 企業挹注金之10% (用於研究計畫支出, 含研究主持費上限 8萬元/月) 科技部每年產學合 作計畫補助研究經 費約8億元,再槓 桿50%之企業挹注 金(總額達12億元) 預估可創造產值40 億元 產學計畫加值鼓勵方案 (達陣方案) 107.8.1 正式啟動 申請免計畫書 隨到隨受理
目的:培育並鼓勵大專學生參與專題研究計畫。 申請日期:每年3月31日。 研究期間:每年七月一日至次年二月底止,計八個月 經費編列:學生獎學金每月6,000元,八個月計48,000元 獎勵:
撰寫報告可競逐「大專學生研究創作獎」,獲獎者獎金 新台幣20,000元及獎狀一紙(每年限二百名)。 指導教授可獲頒獎牌一座
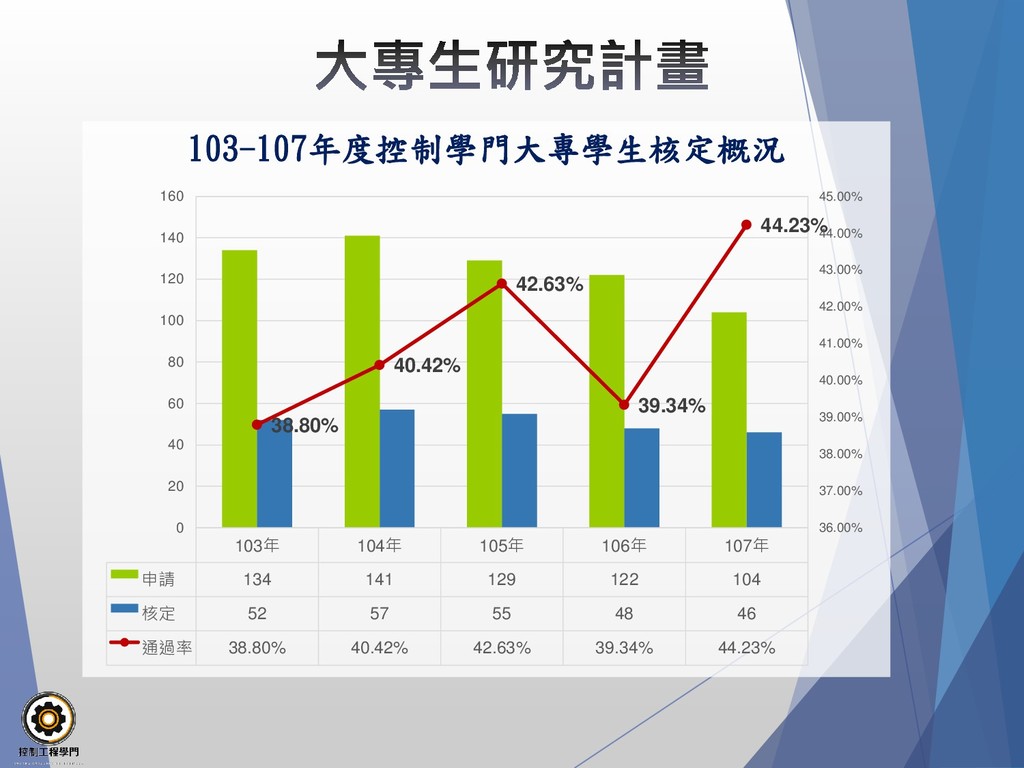
103年 104年 105年 106年 107年 申請 134 141 129 122
104 核定 52 57 55 48 46 通過率 38.80% 40.42% 42.63% 39.34% 44.23% 38.80% 40.42% 42.63% 39.34% 44.23% 36.00% 37.00% 38.00% 39.00% 40.00% 41.00% 42.00% 43.00% 44.00% 45.00% 0 20 40 60 80 100 120 140 160 103-107年度控制學門大專學生核定概況
出席國際學術會議: *於計畫中一併提出申請。 *出席國際重要學術學會理監事或國際知名學術期刊編輯委 員會,不發表論文者,每年以補助一次為限。 團隊參與國際學術學會會議 *團隊召集人須為教授或研究員,專題研究計畫成果績優, 曾任國際學術學會理監事會成員或委員會重要成員者優先 補助。
*每案申請及補助人數以十名以內為原則。 *於會議舉行日二個月前提出申請。
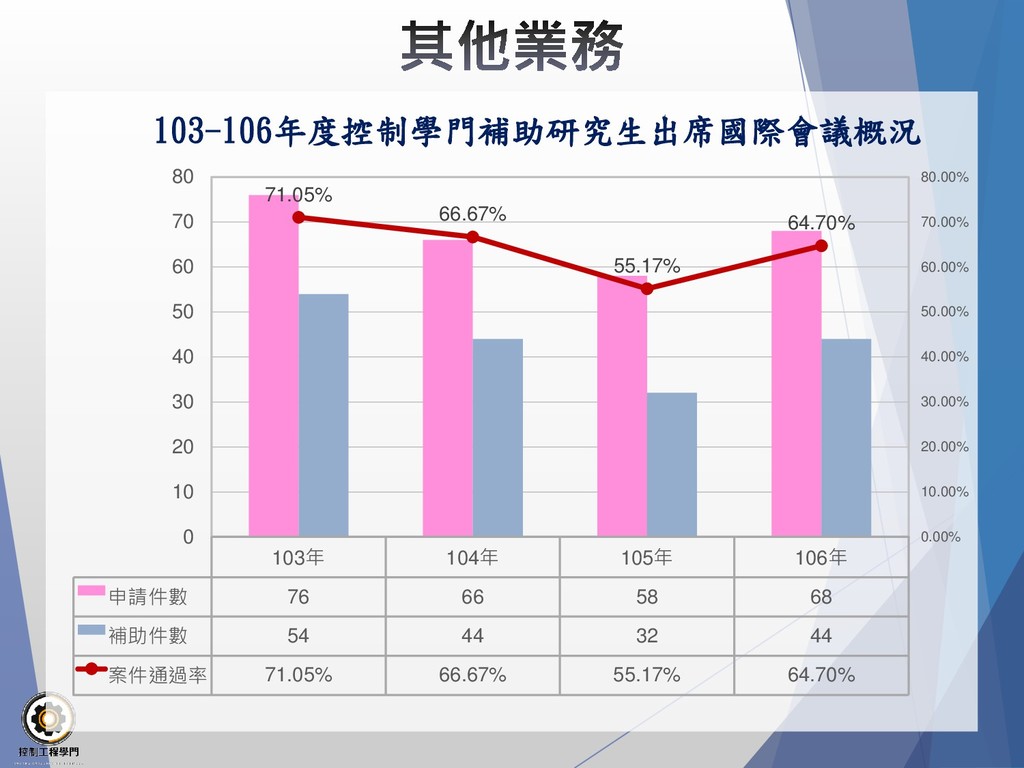
103年 104年 105年 106年 申請件數 76 66 58 68 補助件數
54 44 32 44 案件通過率 71.05% 66.67% 55.17% 64.70% 71.05% 66.67% 55.17% 64.70% 0.00% 10.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00% 80.00% 0 10 20 30 40 50 60 70 80 103-106年度控制學門補助研究生出席國際會議概況
1. 控制學門鼓勵教師及研究生出席主流領域水準較佳之國際會議發表論文。 水準較佳之國際會議的認定原則為:IEEE (區域性會議除外)、ASME、 AIAA、SIAM、ACM、IET、ACA等國際學術組織所舉辦之國際學術會議, 見附錄, 2. 每年因會議地點不同,論文投稿量會有差異,本表以2017年會議揭露之 資訊供參考。 詳如連結:https://goo.gl/WXKjFA
學門新措施
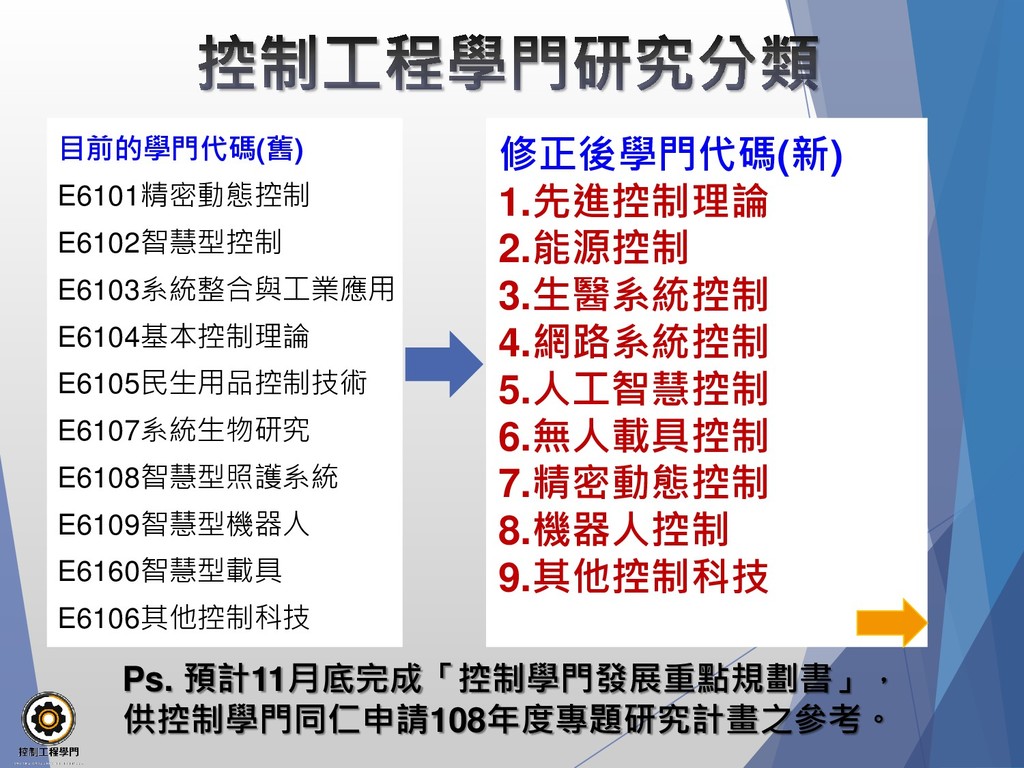
目前的學門代碼(舊) E6101精密動態控制 E6102智慧型控制 E6103系統整合與工業應用 E6104基本控制理論 E6105民生用品控制技術 E6107系統生物研究 E6108智慧型照護系統 E6109智慧型機器人 E6160智慧型載具
E6106其他控制科技 修正後學門代碼(新) 1.先進控制理論 2.能源控制 3.生醫系統控制 4.網路系統控制 5.人工智慧控制 6.無人載具控制 7.精密動態控制 8.機器人控制 9.其他控制科技 Ps. 預計11月底完成「控制學門發展重點規劃書」, 供控制學門同仁申請108年度專題研究計畫之參考。
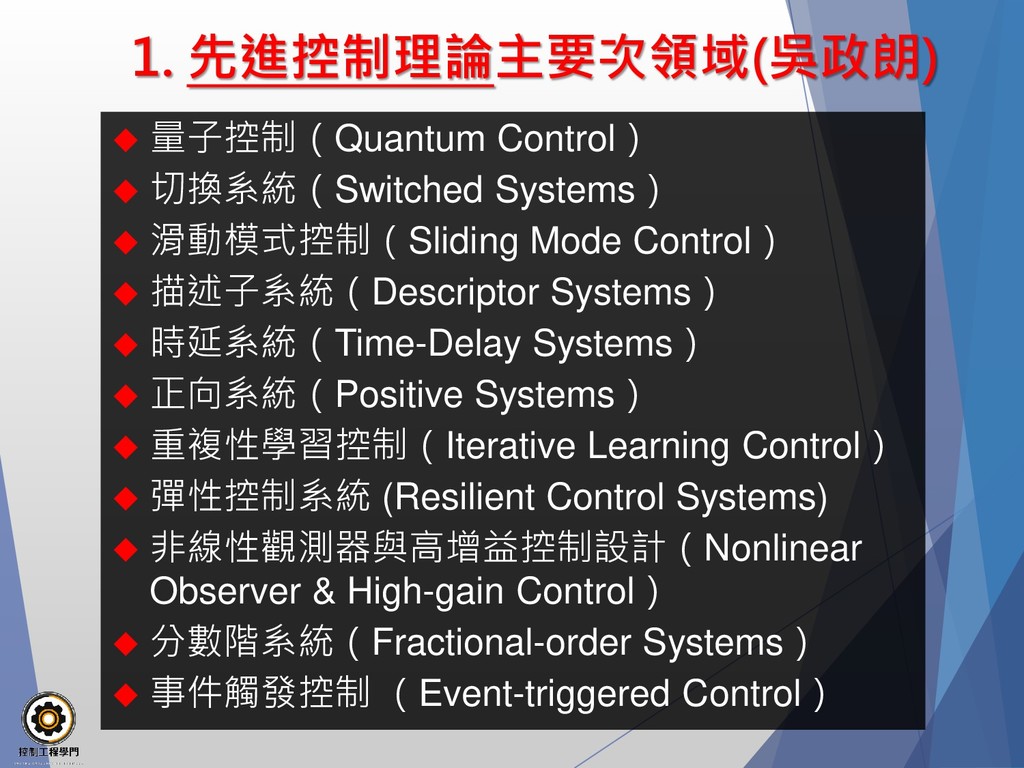
量子控制(Quantum Control) 切換系統(Switched Systems) 滑動模式控制(Sliding Mode Control)
描述子系統(Descriptor Systems) 時延系統(Time-Delay Systems) 正向系統(Positive Systems) 重複性學習控制(Iterative Learning Control) 彈性控制系統 (Resilient Control Systems) 非線性觀測器與高增益控制設計(Nonlinear Observer & High-gain Control) 分數階系統(Fractional-order Systems) 事件觸發控制 (Event-triggered Control) 1. 先進控制理論主要次領域(吳政朗)
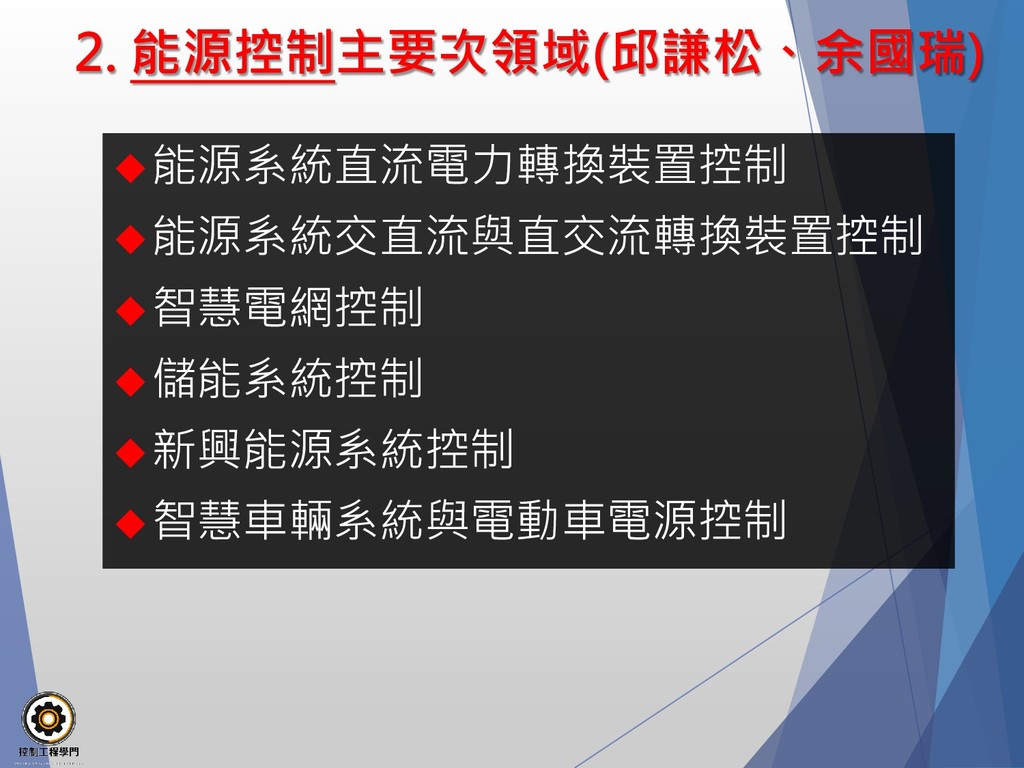
能源系統直流電力轉換裝置控制 能源系統交直流與直交流轉換裝置控制 智慧電網控制 儲能系統控制 新興能源系統控制 智慧車輛系統與電動車電源控制 2. 能源控制主要次領域(邱謙松、余國瑞)
3. 生醫系統控制主要次領域(李柏磊、 吳謂勝) 微型化與智慧化醫療設備技術 微型可攜式偵測感測器、老齡預防醫學、機器學習醫 療準確度及信賴度 智慧行動輔具與智慧復健技術 高科技行動與溝通輔具、腦波人機控制裝置、神經回
饋復健治療 系統生物學大數據分析技術 計算系統生物學及各種應用、系統藥物篩選及設計、 精準醫學
網狀控制系統 資料感測通訊與控制、系統動態行為與資訊流之互動、網路 監控系統、群組間之通訊與運動機制、應用隨機幾何於大型 無線網路之分佈式估測與控制、無線網路控制系統之跨階層 設計、分散式網狀控制系統 計算智慧與控制融合
網路系統控制與智慧科技之控制、計算智慧於複雜系統的控 制策略之設計、計算智慧於生物訊號之建模、控制與預測、 計算智慧於工具機智能化之應用、計算智慧於智慧工廠工作 環境調控之應用 智慧物聯網之控制與大數據應用 智慧型家庭與智慧型工廠、智慧控制的自主能力的系統、無 線感測網路之群集控制演算法、物聯網於智慧農業之應用、 智慧物聯網與大數據之應用 4. 網路系統控制主要次領域(黃有評)
先進模糊控制 先進類神經網路控制 智慧型控制學習演算法 人工智慧控制相關前瞻應用 5. 人工智慧控制主要次領域(邱俊賢)
自動駕駛控制技術 自駕車智慧環境感知技術及應用、虛擬環境訓練資料模型於實體無 人載具控制之驗證、高擬真XiL (model / hardware / controller /
sensor / human driver / passenger-in-the-Loop)模擬技術、車輛動 態與運動控制導向之自動車高速路徑規劃、車輛動態控制與估測、 電動化動力系統控制與節能駕駛技術、電動巴士自主駕駛應用於市 區接駁服務 水域載具控制技術 導航通訊與定位建圖、感測器訊號處理技術、自主控制與避碰模式、 RobotX Challenge、智慧港口 無人飛行載具控制技術 群體飛行控制、智慧型自動駕駛系統、無人機雲(物聯網)、感測 與避障、影像導航與物體追蹤、動力系統效率提升 6. 無人載具控制主要次領域(吳炳飛)
精密伺服控制 視覺伺服與控制技術 CNC控制器先進技術 多軸精密運動控制 複雜多機系統之精密動態控制 7. 精密動態控制主要次領域(陳世樂)
機器人感測系統與人機互動 服務應用機器人系統控制 產業機器人 醫療與輔助機器人 特殊結構機器人 雲端機器人之控制與智慧應用 8. 機器人控制主要次領域(翁慶昌)
執行結束三個月內完成經費結案及報告結案 非就地查核學校,請提早於校內完成經費核銷作業, 並由學校將原始憑證函送科技部審查(不要拖到第三 個月),以避免影響工程司下年度可使用經費。 出席學門每年舉辦的成果發表會 以終為始,化研為用,展現研究成果多元效益 學術面:發表頂尖國際學術期刊、學術榮譽(IEEE Fellow、國際期刊主編等)、重要獎項…等
產業應用面:技轉、創業…等 社會民生面:應用於醫療、高齡照護、防救災…等 人才培育面:學生進入該產業就業…等
提高審查品質,懇請各位老師務必協助 敬請審查委員撥冗審查,並提供公正客觀的評分、具體詳實 且有實質幫助的審查意見。 不論是否通過,審查意見將以匿名方式提供計畫申請人參考, 以樹立良性互動及負責任的審查文化。 鼓勵提高研究成果之品質與影響力。
出席水準較佳的國際會議 表CM12出席國際學術會議:請詳述計畫主持人近三年國際學術會議之論文發表情形。 (包括會議名稱…及後續收錄於期刊或專書之名稱…) 優秀學者/團隊積極爭取大型/專案計畫。 恪遵學術倫理相關規範。 計畫未通過,切勿氣餒,請持續提案,機會永在。
計畫申請件數持續減少,將造成嚴重負面影響 學門所獲配之經費亦同步減少。 造成惡性循環,學門會逐漸萎縮。 核定件數 申請件數 = 通過率 學門似乎有逐漸面臨「後繼無人」的困境
新聘隨到隨審計畫件數少。 無法每年都有年輕學者獲得吳大猷獎。 部長要求學門召集人、複審委員必須有半數在50歲以 下,學門須提早培育適當且充足的人選。
協助學者向上提升 學術攻頂研究計畫、傑出獎(80名) 對年輕學者的協助 優秀年輕學者研究計畫(45歲以下)、愛因斯坦培植 計畫(32歲以下,50件)、哥倫布計畫(35歲以下,30 件)、領袖學者助攻方案-沙克爾頓計畫(45歲以下, 跨領域研究團隊,每年以10~20件為原則)、吳大猷 獎(42歲以下,45名)
鼓勵技專校院從事實務型研究專案計畫(申請時未 執行本部計畫者;但執行本專案計畫且原核定執行 期間至108年7月31日止者,不在此限) 鼓勵女性從事科學及技術研究專案計畫(從未申請 本部專題計畫、近3年未執行本部專題計畫)
None
附 錄
相關辦法及資訊 科技部網站: http://www.most.gov.tw
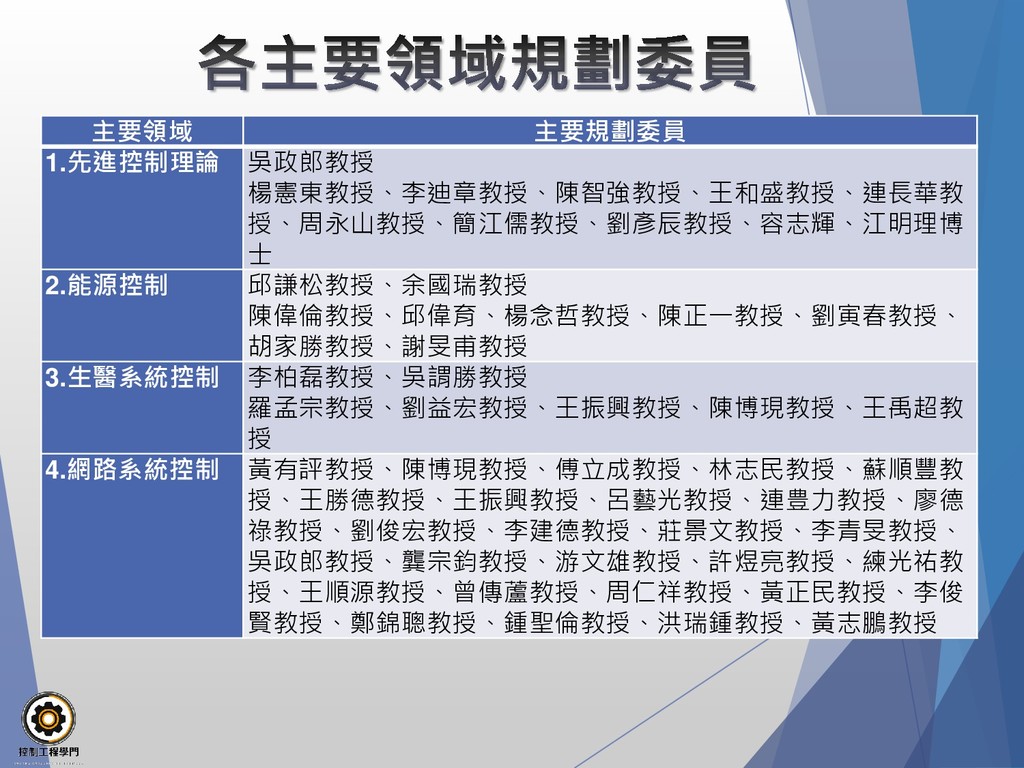
主要領域 主要規劃委員 1.先進控制理論 吳政郎教授 楊憲東教授、李迪章教授、陳智強教授、王和盛教授、連長華教 授、周永山教授、簡江儒教授、劉彥辰教授、容志輝、江明理博 士 2.能源控制 邱謙松教授、余國瑞教授 陳偉倫教授、邱偉育、楊念哲教授、陳正一教授、劉寅春教授、
胡家勝教授、謝旻甫教授 3.生醫系統控制 李柏磊教授、吳謂勝教授 羅孟宗教授、劉益宏教授、王振興教授、陳博現教授、王禹超教 授 4.網路系統控制 黃有評教授、陳博現教授、傅立成教授、林志民教授、蘇順豐教 授、王勝德教授、王振興教授、呂藝光教授、連豊力教授、廖德 祿教授、劉俊宏教授、李建德教授、莊景文教授、李青旻教授、 吳政郎教授、龔宗鈞教授、游文雄教授、許煜亮教授、練光祐教 授、王順源教授、曾傳蘆教授、周仁祥教授、黃正民教授、李俊 賢教授、鄭錦聰教授、鍾聖倫教授、洪瑞鍾教授、黃志鵬教授
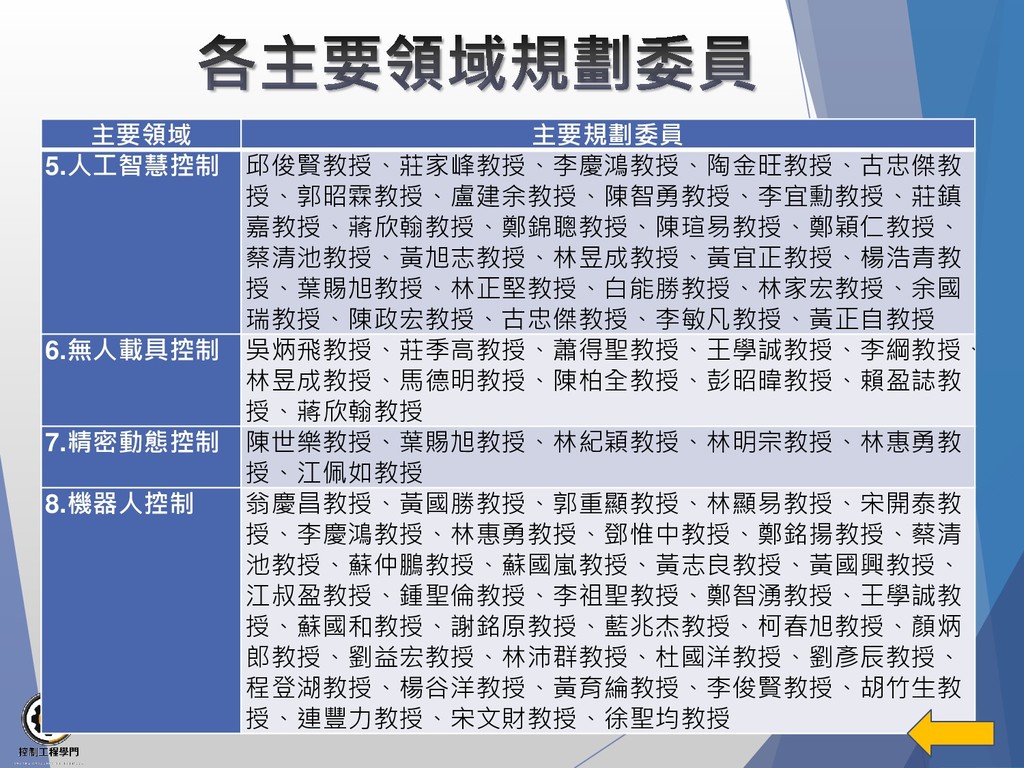
主要領域 主要規劃委員 5.人工智慧控制 邱俊賢教授、莊家峰教授、李慶鴻教授、陶金旺教授、古忠傑教 授、郭昭霖教授、盧建余教授、陳智勇教授、李宜勳教授、莊鎮 嘉教授、蔣欣翰教授、鄭錦聰教授、陳瑄易教授、鄭穎仁教授、 蔡清池教授、黃旭志教授、林昱成教授、黃宜正教授、楊浩青教 授、葉賜旭教授、林正堅教授、白能勝教授、林家宏教授、余國 瑞教授、陳政宏教授、古忠傑教授、李敏凡教授、黃正自教授 6.無人載具控制
吳炳飛教授、莊季高教授、蕭得聖教授、王學誠教授、李綱教授、 林昱成教授、馬德明教授、陳柏全教授、彭昭暐教授、賴盈誌教 授、蔣欣翰教授 7.精密動態控制 陳世樂教授、葉賜旭教授、林紀穎教授、林明宗教授、林惠勇教 授、江佩如教授 8.機器人控制 翁慶昌教授、黃國勝教授、郭重顯教授、林顯易教授、宋開泰教 授、李慶鴻教授、林惠勇教授、鄧惟中教授、鄭銘揚教授、蔡清 池教授、蘇仲鵬教授、蘇國嵐教授、黃志良教授、黃國興教授、 江叔盈教授、鍾聖倫教授、李祖聖教授、鄭智湧教授、王學誠教 授、蘇國和教授、謝銘原教授、藍兆杰教授、柯春旭教授、顏炳 郎教授、劉益宏教授、林沛群教授、杜國洋教授、劉彥辰教授、 程登湖教授、楊谷洋教授、黃育綸教授、李俊賢教授、胡竹生教 授、連豐力教授、宋文財教授、徐聖均教授
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}