difficulty: Medium/Difficult • Description: • Many tools consider a CAN frame consists of arbitration ID, control flags, and data fields. ID 0x607 thinks they should check some more. • 多くのツールでは、CANフレームはアービトレーションID、コントロールフラグ、 およびデータフィールドで構成されると考えられています。ID 0x607は、もっと他 にもチェックすべきことがあると考えているようです。 20
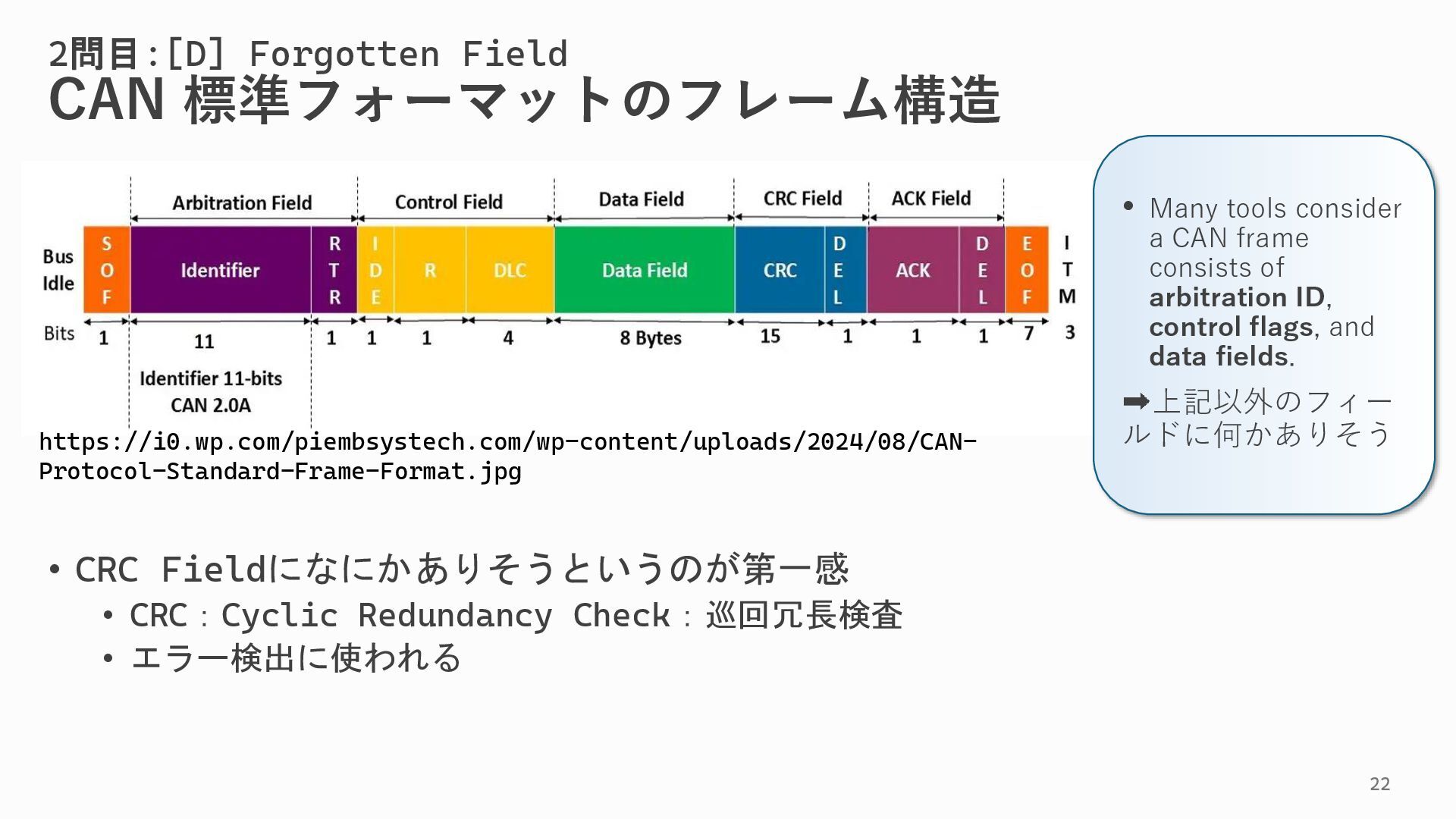
https://i0.wp.com/piembsystech.com/wp-content/uploads/2024/08/CAN- Protocol-Standard-Frame-Format.jpg 2問目:[D] Forgotten Field CAN 標準フォーマットのフレーム構造 • Many tools consider a CAN frame consists of arbitration ID, control flags, and data fields. 上記以外のフィー ルドに何かありそう
Medium/Difficult • Description: • Flag is a 26-byte string at 0x0803e000 but Read Memory By Address won't let me read it :( • 診断通信であるUDS の Read Memory By Address で 0x0803e000の中身を 読み取れば良さそう 26
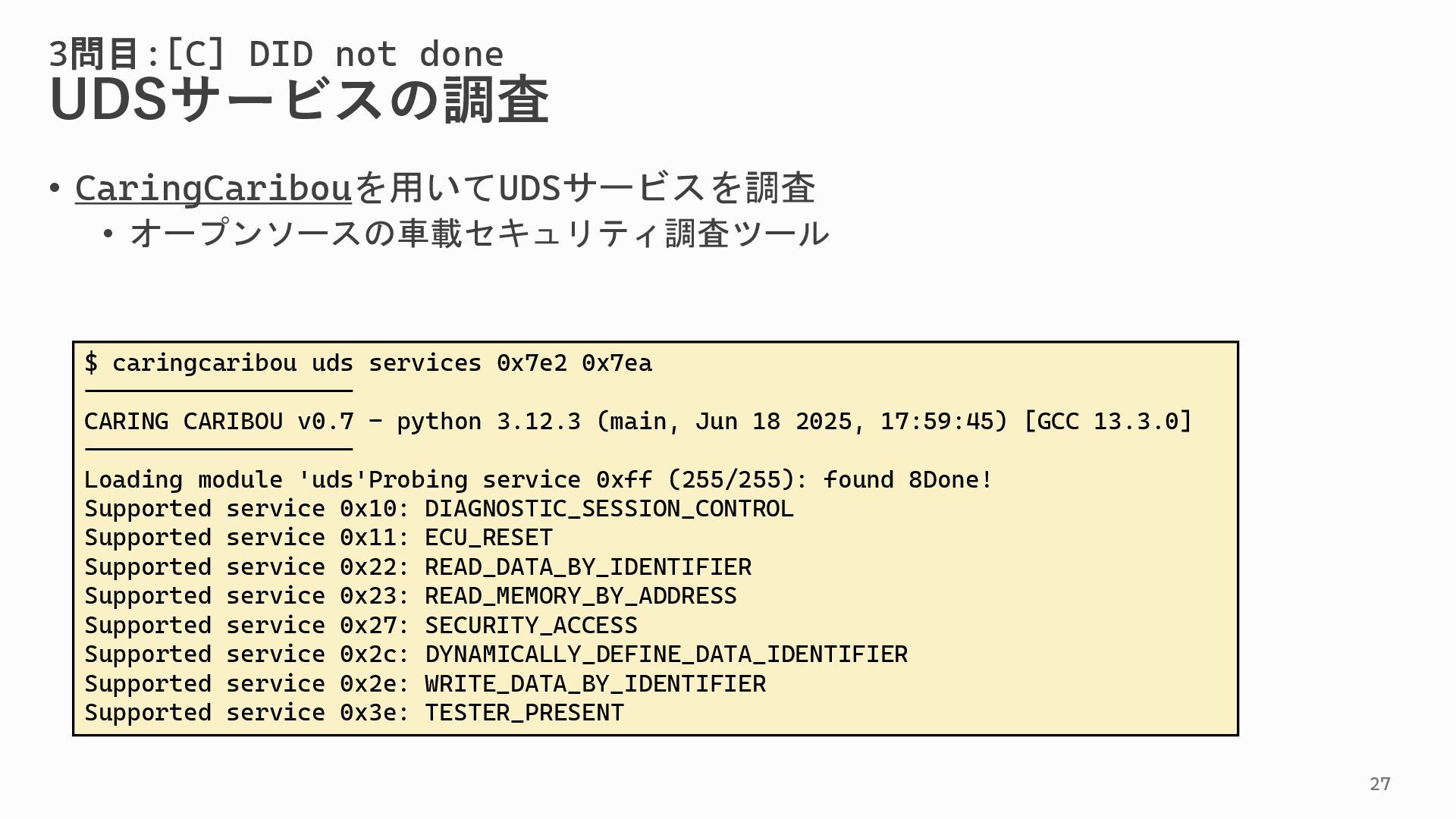
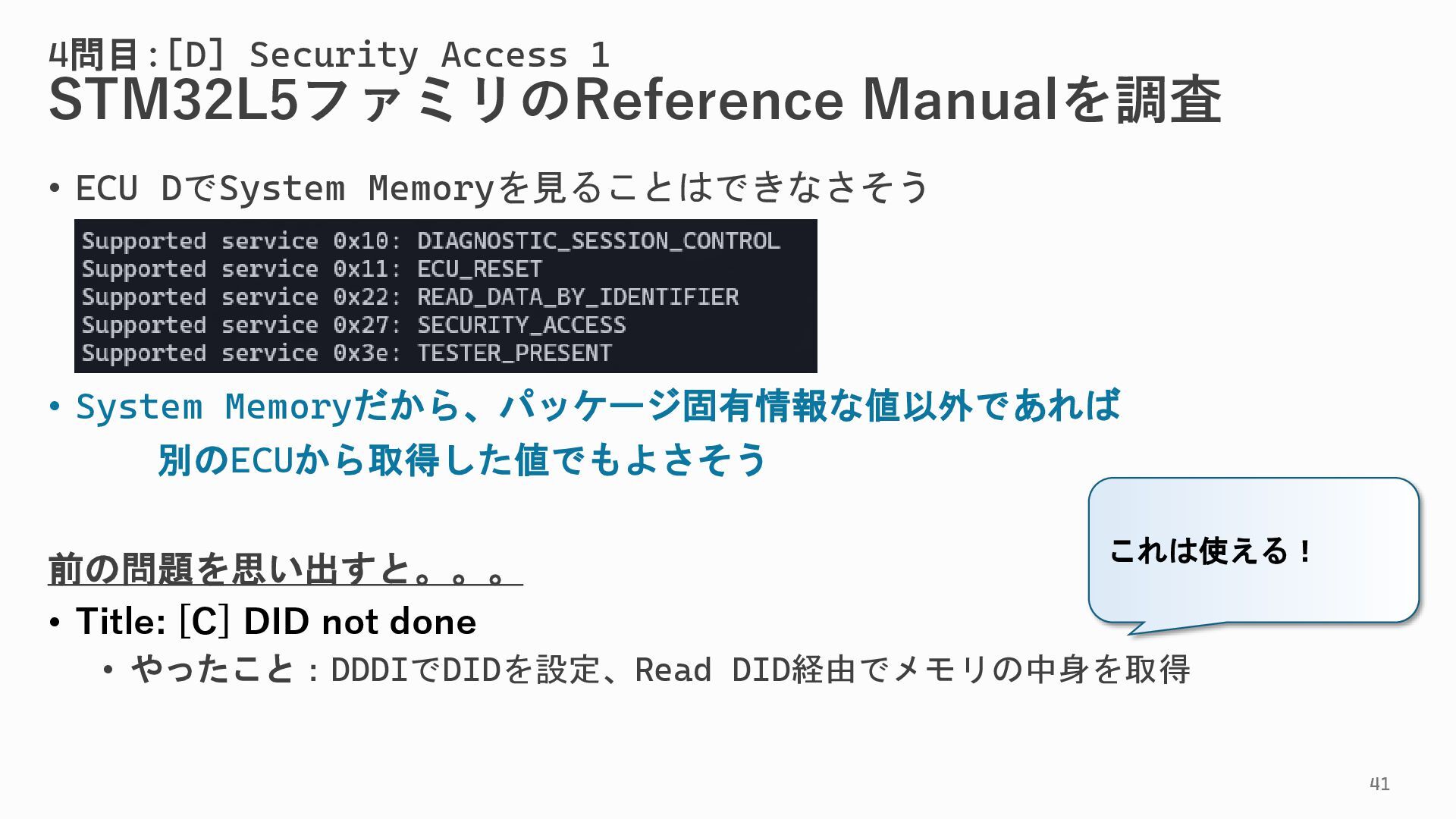
------------------- CARING CARIBOU v0.7 - python 3.12.3 (main, Jun 18 2025, 17:59:45) [GCC 13.3.0] ------------------- Loading module 'uds'Probing service 0xff (255/255): found 8Done! Supported service 0x10: DIAGNOSTIC_SESSION_CONTROL Supported service 0x11: ECU_RESET Supported service 0x22: READ_DATA_BY_IDENTIFIER Supported service 0x23: READ_MEMORY_BY_ADDRESS Supported service 0x27: SECURITY_ACCESS Supported service 0x2c: DYNAMICALLY_DEFINE_DATA_IDENTIFIER Supported service 0x2e: WRITE_DATA_BY_IDENTIFIER Supported service 0x3e: TESTER_PRESENT 27 3問目:[C] DID not done UDSサービスの調査
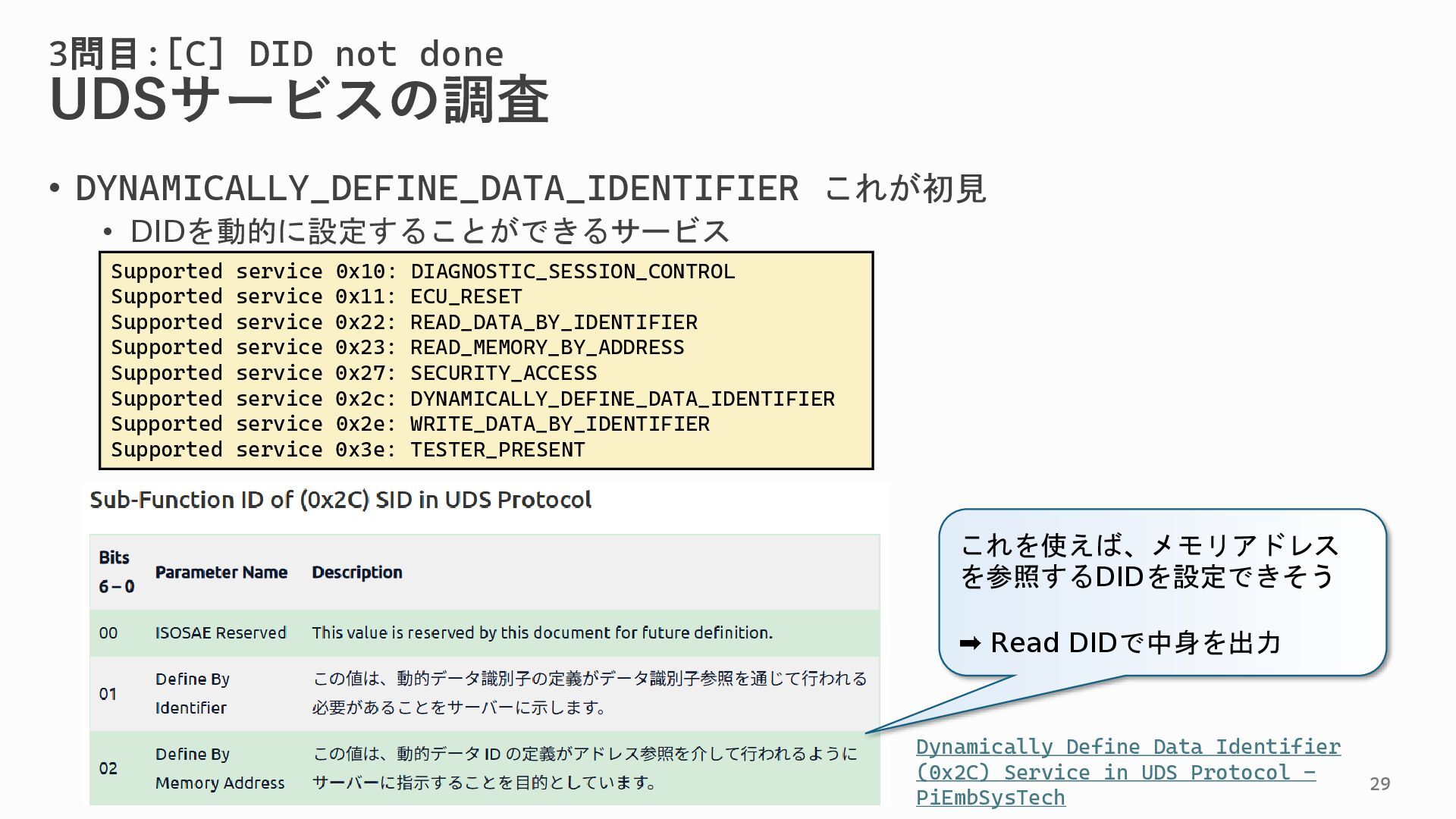
Service in UDS Protocol - PiEmbSysTech 29 Supported service 0x10: DIAGNOSTIC_SESSION_CONTROL Supported service 0x11: ECU_RESET Supported service 0x22: READ_DATA_BY_IDENTIFIER Supported service 0x23: READ_MEMORY_BY_ADDRESS Supported service 0x27: SECURITY_ACCESS Supported service 0x2c: DYNAMICALLY_DEFINE_DATA_IDENTIFIER Supported service 0x2e: WRITE_DATA_BY_IDENTIFIER Supported service 0x3e: TESTER_PRESENT 3問目:[C] DID not done UDSサービスの調査 これを使えば、メモリアドレス を参照するDIDを設定できそう Read DIDで中身を出力
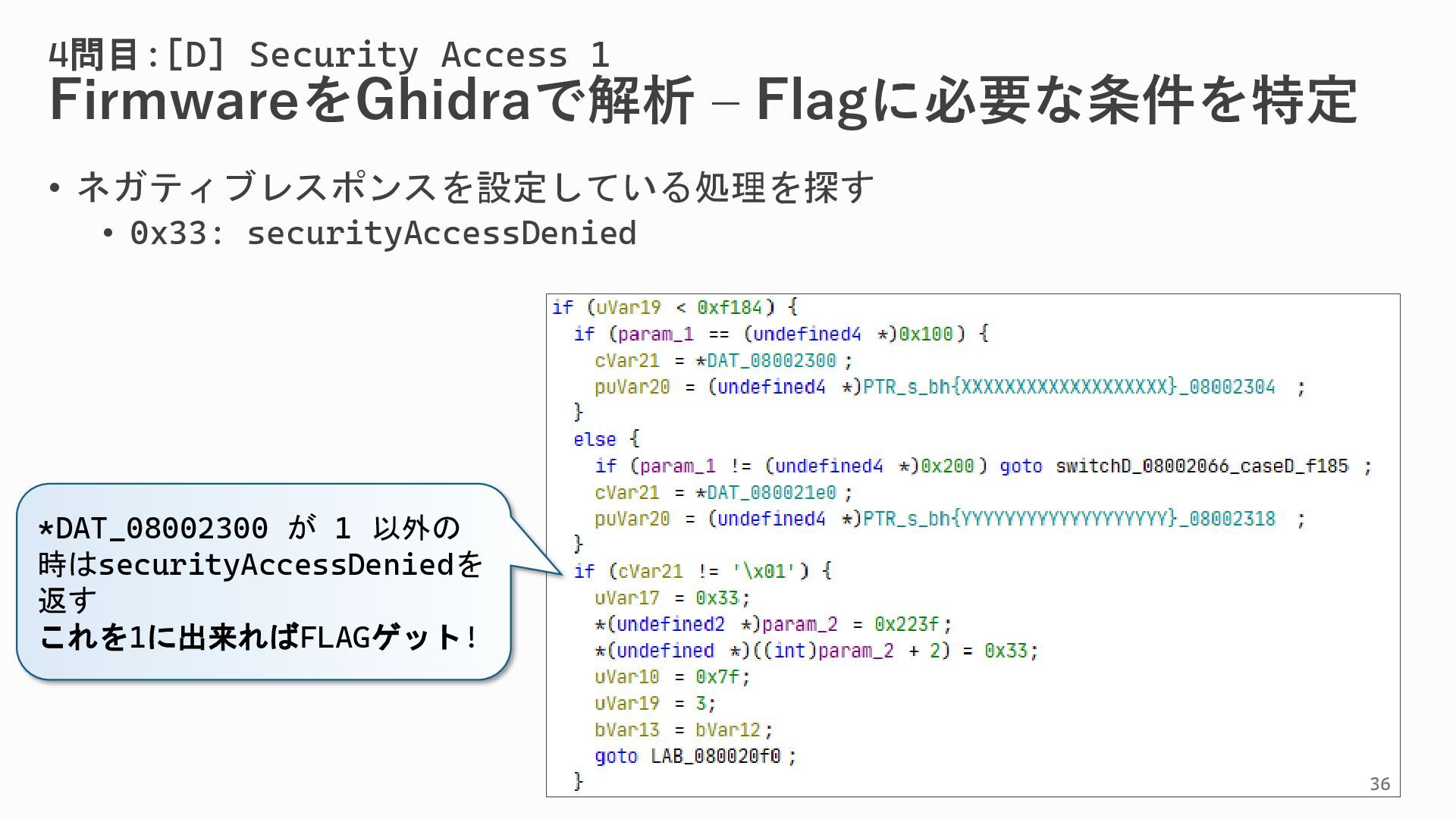
Attachment: ECUD.hex (flags are redacted) • Intended difficulty: Very Difficult • Description: • The attached file corresponds to the firmware of ECU D, with all its flags redacted. Try to extract the real value of bh{XXXXXXXXXXXXXXXXXXX} from your RAMN hardware. • 添付ファイルは、すべてのフラグが編集・削除されたECU Dのファームウェアです。あなた のRAMNハードウェアから、bh{XXXXXXXXXXXXXXXXXXX}の実際の値を抽出してください。 33
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![1問目:[A/C] Ramen Clicker • Tags: CAN, Hardware • Intended difficulty:](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_8.jpg){kind=link}
![1問目:[A/C] Ramen Clicker 初動調査 - 動作を眺める • 現象 • ECU](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_9.jpg){kind=link}
![1問目:[A/C] Ramen Clicker 初動調査 - クリック時の動作を調査 • シフトレバーをクリックしたときを観察 • 攻撃の方針を考える](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_10.jpg){kind=link}
![1問目:[A/C] Ramen Clicker クリック時のメッセージを偽装 • USB接続したPCからCANメッセージを送信 • ECU Aの液晶に以下が表示される 12](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_11.jpg){kind=link}
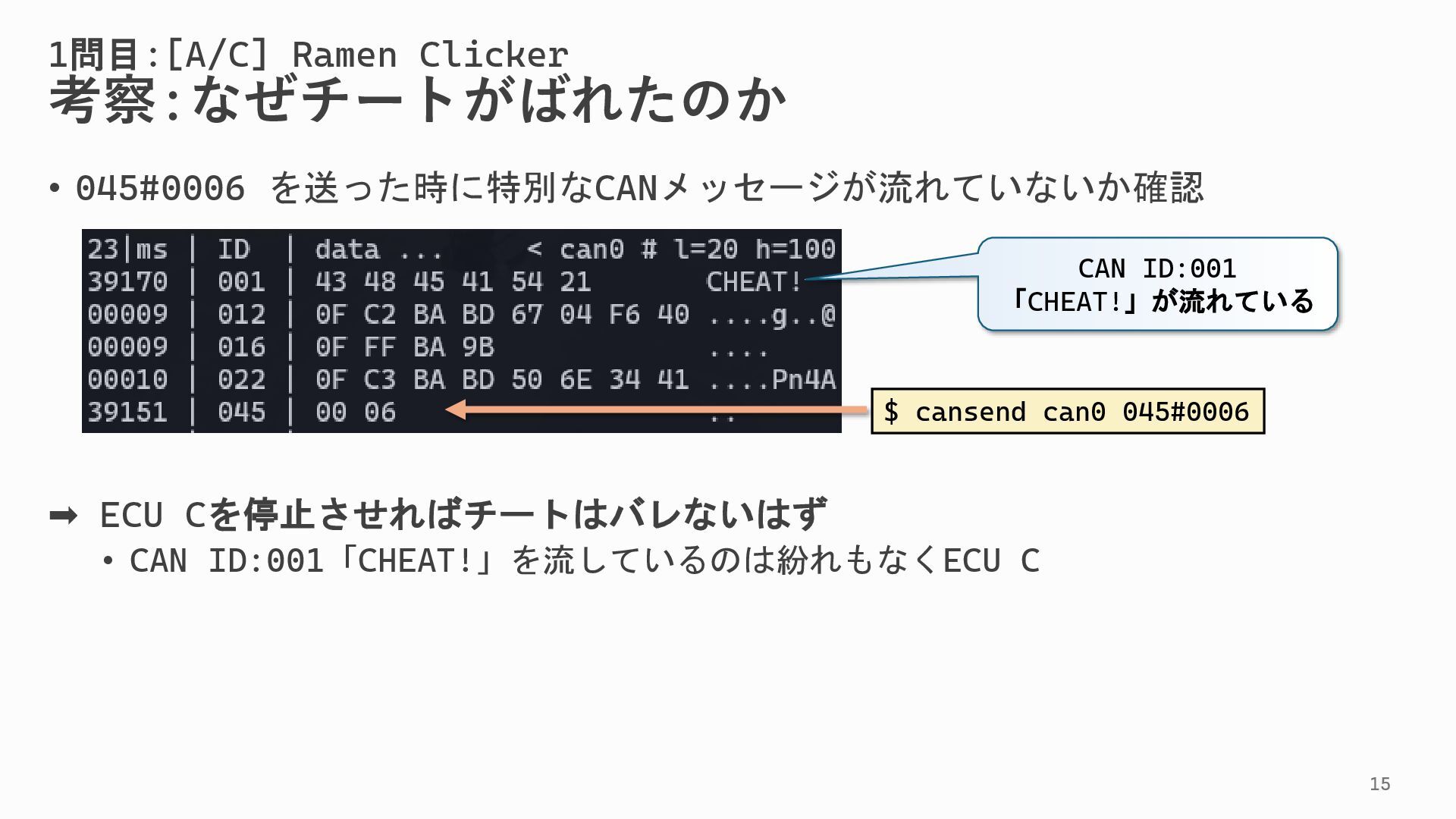
![1問目:[A/C] Ramen Clicker 考察:なぜチートがばれたのか • CANの概要 • ブロードキャスト型のプロトコル • 全てのノードが全てのメッセージを受信](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_12.jpg){kind=link}
![1問目:[A/C] Ramen Clicker 考察:なぜチートがばれたのか • あるECUだけ攻撃者が送信したメッセージが偽物だとわかる • 誰か:ECU C •](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_13.jpg){kind=link}
{kind=link}
![• ECU Aに対してECU Cに給電を止めるコマンドを送信 16 1問目:[A/C] Ramen Clicker ECU Cを停止する](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_15.jpg){kind=link}
![17 1問目:[A/C] Ramen Clicker ECU Cの定期送信を取得 ECU Cが止まっているとき ECU Cの](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
![2問目: [D] Forgotten Field • Tags: CAN, Hardware • Intended](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_19.jpg){kind=link}
![• CAN ID 0x607 をダンプしてみる 21 2問目:[D] Forgotten Field CANメッセージをダンプ](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_20.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![• CRCを計算するcandumpのラッパーを実装 25 2問目:[D] Forgotten Field CRC-15-CANの計算 CRCをasciiとして読むと bh{LAGGING_BEHIND} POLY](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_24.jpg){kind=link}
![3問目:[C] DID not done • Tags: UDS • Intended difficulty:](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_25.jpg){kind=link}
{kind=link}
![• Read Memory By Address をしてみる 28 3問目:[C] DID not](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
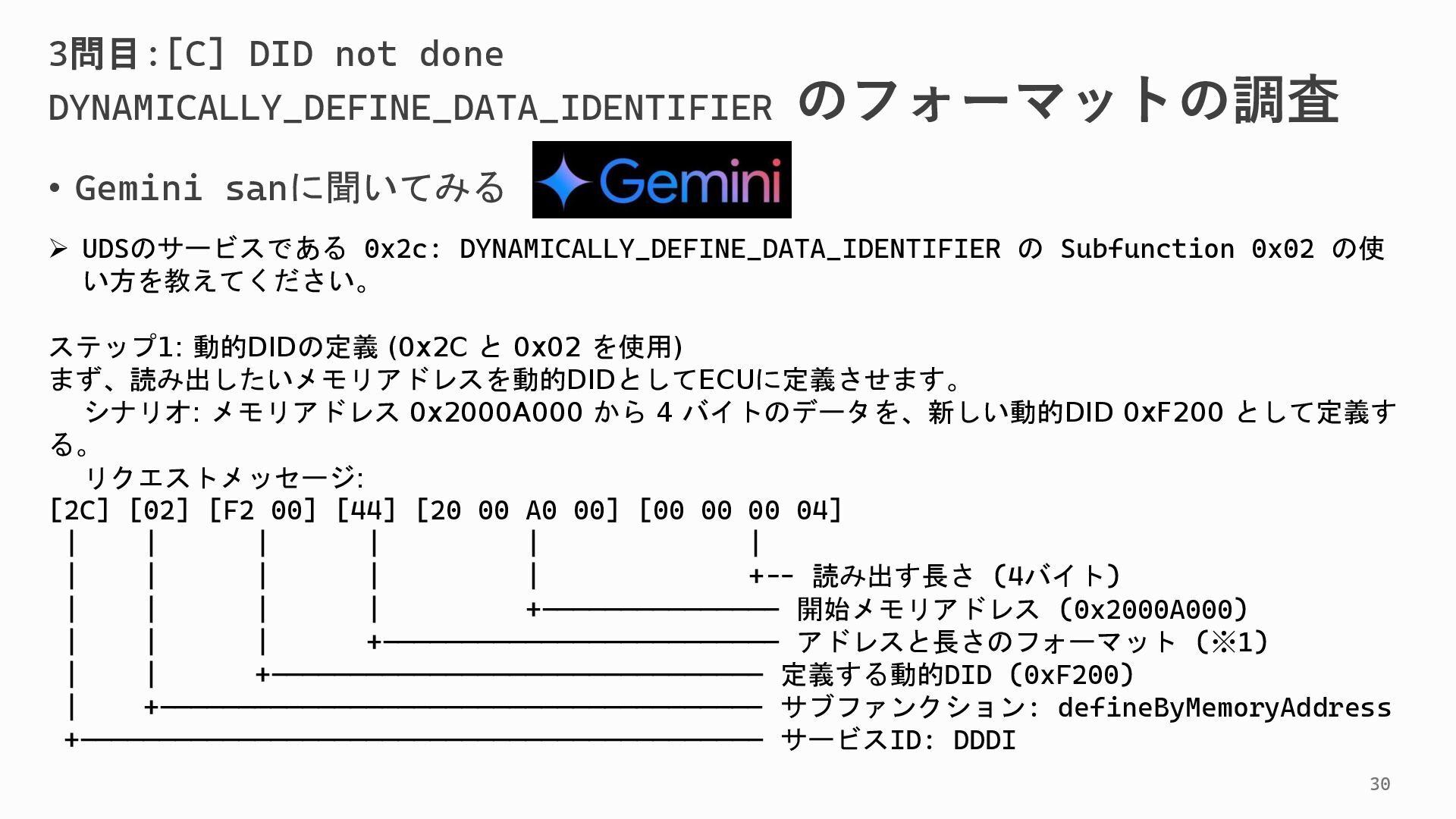
![• Step1 : DDDI(DYNAMICALLY_DEFINE_DATA_IDENTIFIER)の設定 [2C] [02] [F2 00] [44] [08](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_30.jpg){kind=link}
![[2C] [02] [F2 00] [44] [20 00 A0 00] [00](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_31.jpg){kind=link}
![4問目:[D] Security Access 1 • Tags: Reverse, UDS, Hardware •](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_32.jpg){kind=link}
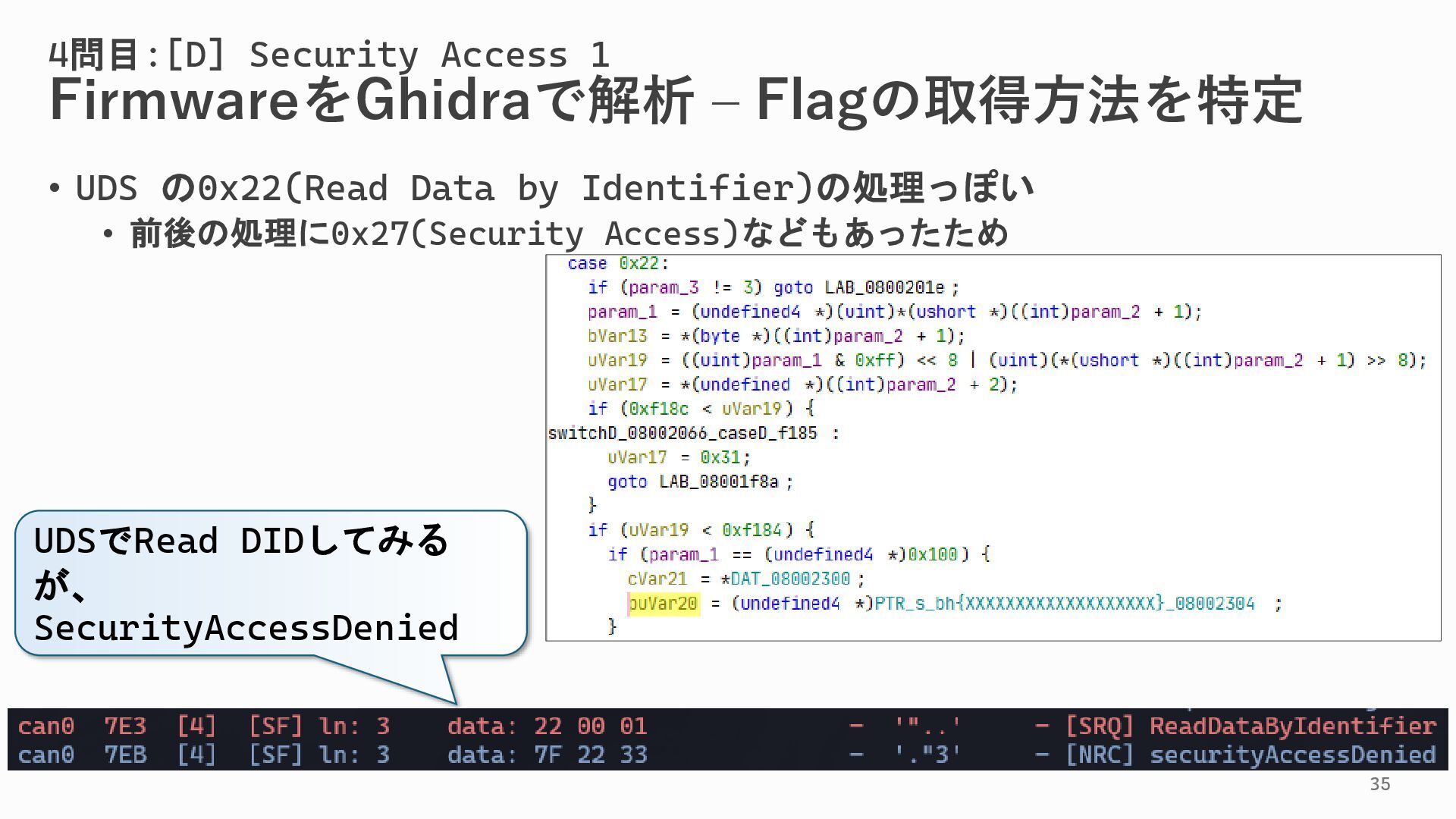
![34 4問目:[D] Security Access 1 FirmwareをGhidraで解析 - Flagの参照を特定 1. Flagを見つけ](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
![• セキュリティアクセスの処理を解析する 37 *DAT_08002300 が 1 になる FUN_0800be24で0が戻ってく ると 4問目:[D]](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_36.jpg){kind=link}
![38 4問目:[D] Security Access 1 FirmwareをGhidraで解析 – AIに関数を聞いてみる ➢ Q:FUN_0800be24](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_37.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![42 4問目:[D] Security Access 1 ECU Cの 0x0BF974C0 から16バイト読み出してみる •](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_41.jpg){kind=link}
![43 4問目:[D] Security Access 1 セキュリティアクセスの突破 0x27に対するポジティブレスポンス FLAGゲット! セキュリティアクセスを突破 !](https://files.speakerdeck.com/presentations/d645aaf02d1a4b7f95fec1baf0eb6cd0/slide_42.jpg){kind=link}
{kind=link}
{kind=link}