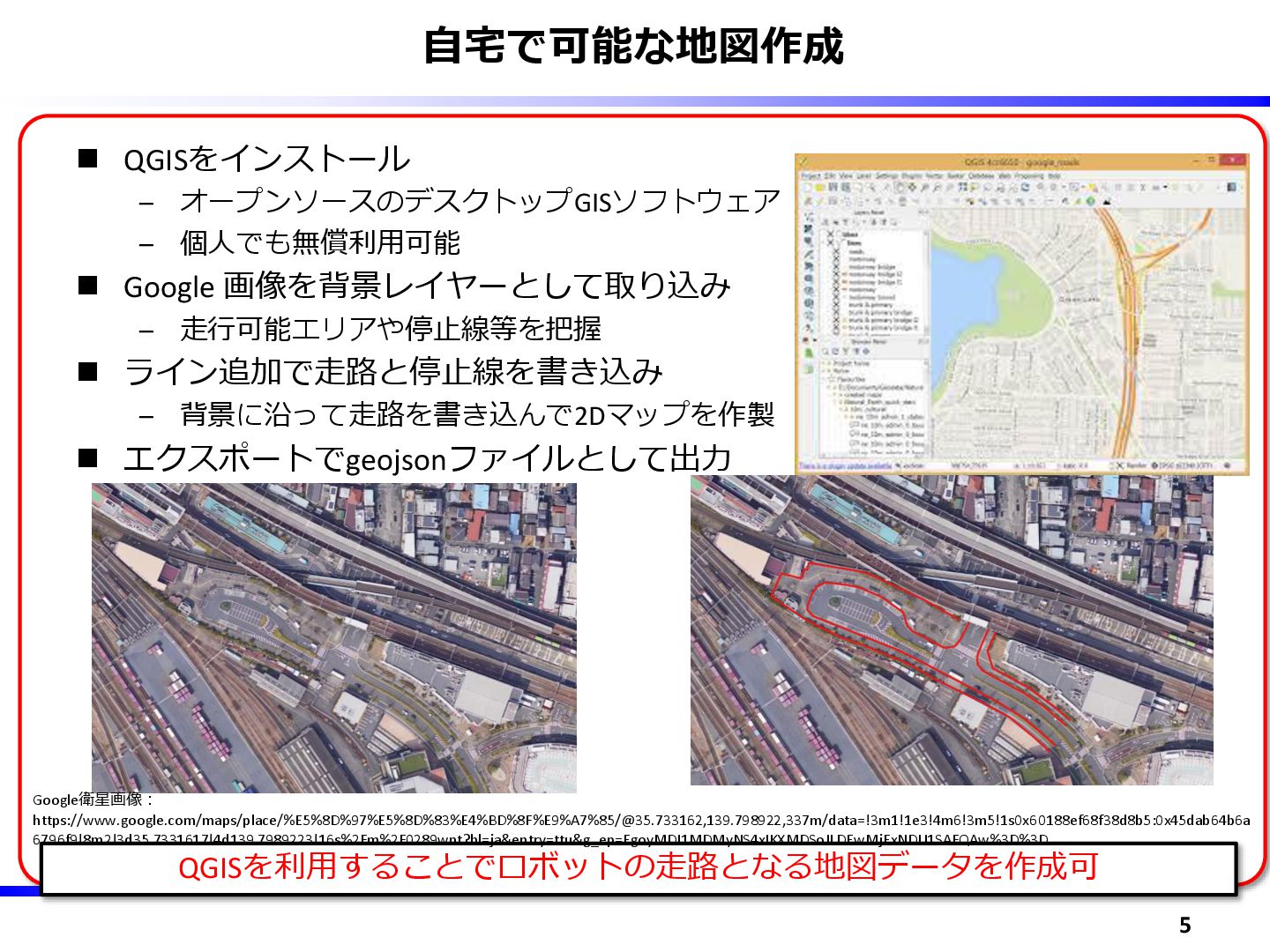
– 走行可能エリアや停止線等を把握 ◼ ライン追加で走路と停止線を書き込み – 背景に沿って走路を書き込んで2Dマップを作製 ◼ エクスポートでgeojsonファイルとして出力 5 QGISを利用することでロボットの走路となる地図データを作成可 Google衛星画像: https://www.google.com/maps/place/%E5%8D%97%E5%8D%83%E4%BD%8F%E9%A7%85/@35.733162,139.798922,337m/data=!3m1!1e3!4m6!3m5!1s0x60188ef68f38d8b5:0x45dab64b6a 6796f9!8m2!3d35.7331617!4d139.7989223!16s%2Fm%2F0289wnt?hl=ja&entry=ttu&g_ep=EgoyMDI1MDMyNS4xIKXMDSoJLDEwMjExNDU1SAFQAw%3D%3D
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}