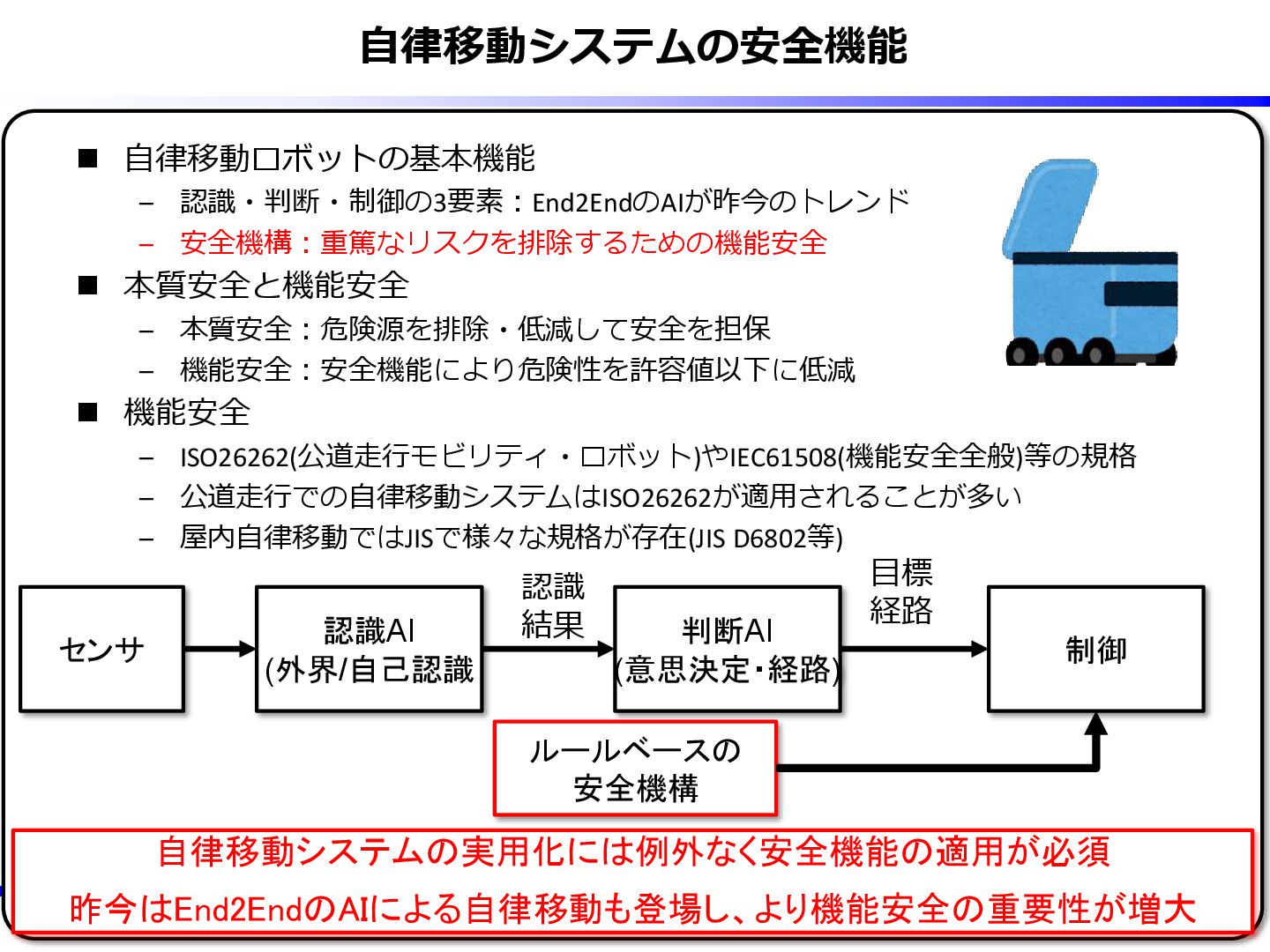
本質安全:危険源を排除・低減して安全を担保 – 機能安全:安全機能により危険性を許容値以下に低減 ◼ 機能安全 – ISO26262(公道走行モビリティ・ロボット)やIEC61508(機能安全全般)等の規格 – 公道走行での自律移動システムはISO26262が適用されることが多い – 屋内自律移動ではJISで様々な規格が存在(JIS D6802等) 2 自律移動システムの実用化には例外なく安全機能の適用が必須 昨今はEnd2EndのAIによる自律移動も登場し、より機能安全の重要性が増大 認識AI (外界/自己認識 判断AI (意思決定・経路) 目標 経路 認識 結果 制御 ルールベースの 安全機構 センサ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}