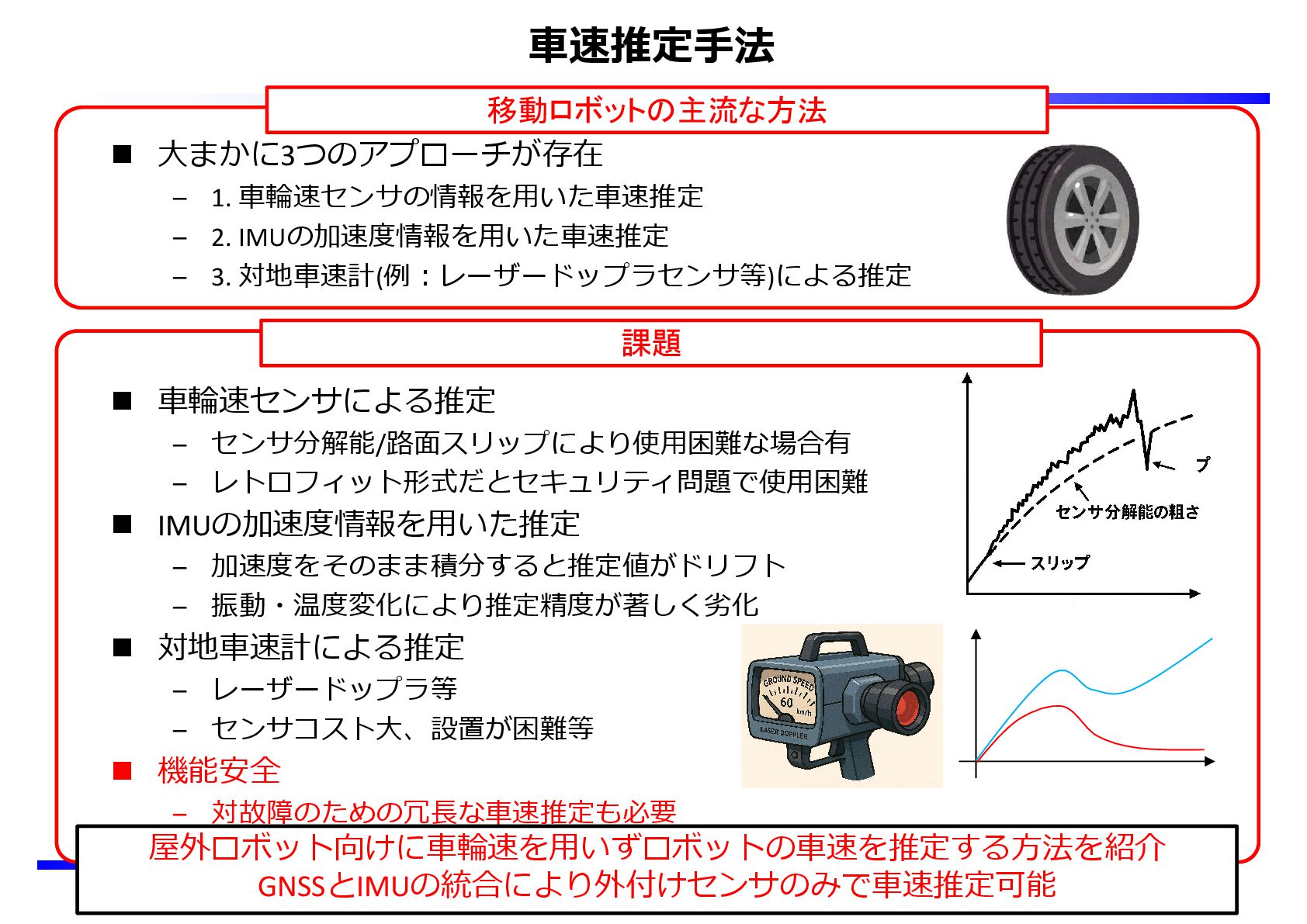
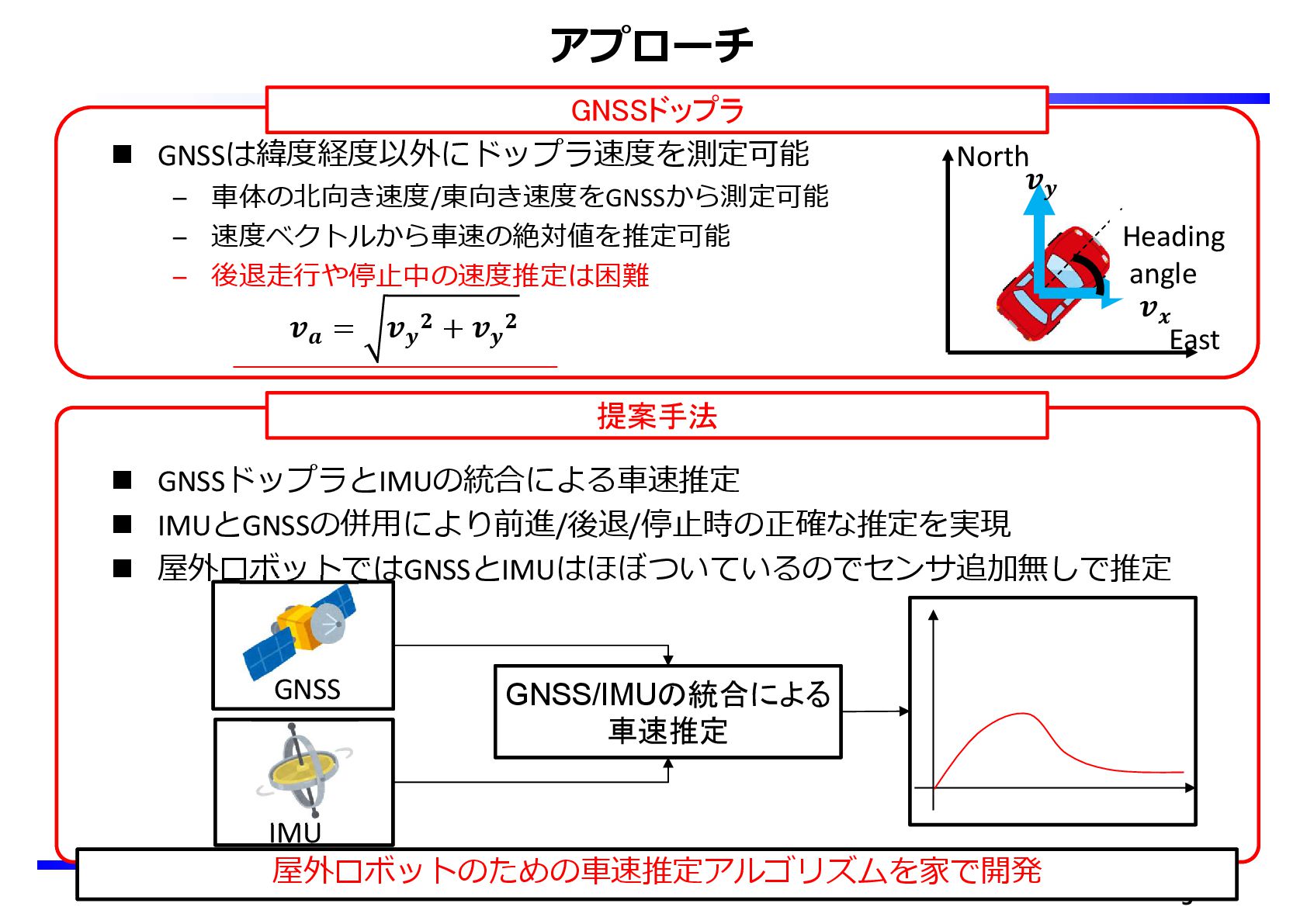
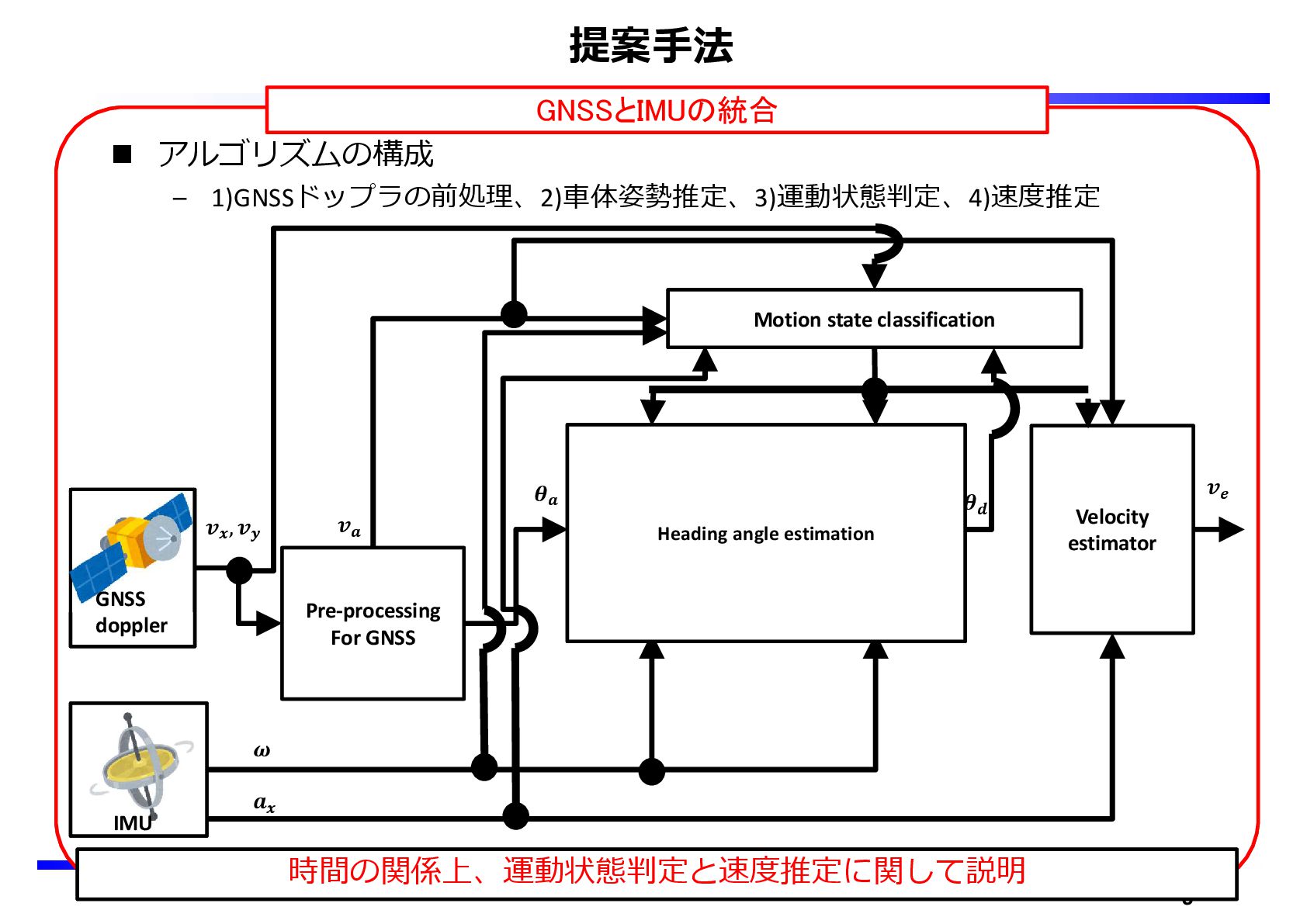
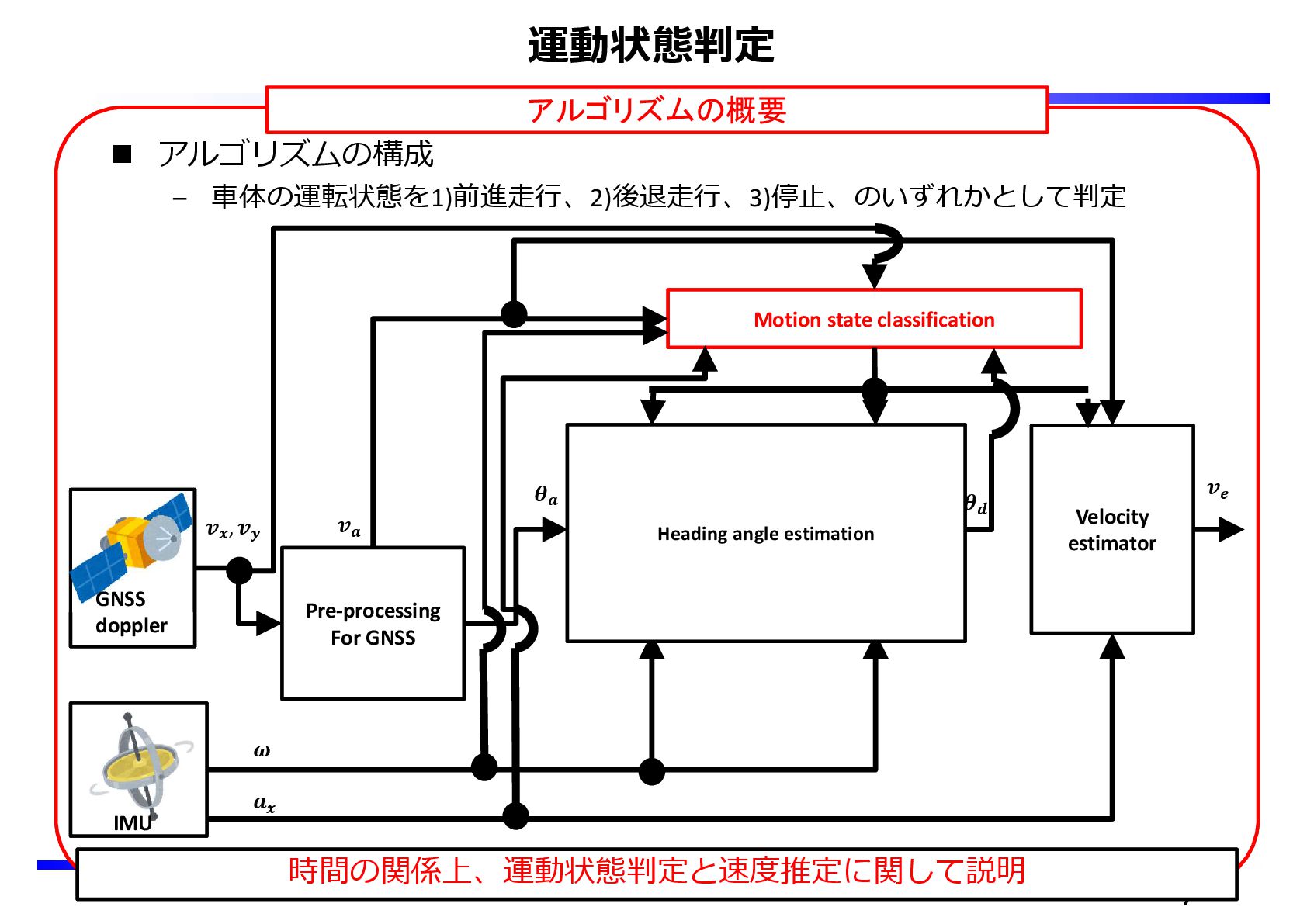
3. 対地車速計(例:レーザードップラセンサ等)による推定 車輪速センサによる推定 – センサ分解能/路面スリップにより使用困難な場合有 – レトロフィット形式だとセキュリティ問題で使用困難 IMUの加速度情報を用いた推定 – 加速度をそのまま積分すると推定値がドリフト – 振動・温度変化により推定精度が著しく劣化 対地車速計による推定 – レーザードップラ等 – センサコスト大、設置が困難等 機能安全 – 対故障のための冗⾧な車速推定も必要 4 移動ロボットの主流な方法 屋外ロボット向けに車輪速を用いずロボットの車速を推定する方法を紹介 GNSSとIMUの統合により外付けセンサのみで車速推定可能 課題
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}