1 Davide Ancona 1 Ekaterina Komendantskaya 2 1Department of Informatics, Bioengineering, Robotics and Systems Engineering University of Genoa 2Department of Computer Science Heriot-Watt University of Edinburgh Workshop on Coalgebra, Horn Clause Logic Programming and Types, 29th November 2016, Edinburgh, UK
logic program P and then write type-checking/inference queries to be solved w.r.t. to P (Ancona and Lagorio, 2009). types are terms inductive semantics is not enough
logic program P and then write type-checking/inference queries to be solved w.r.t. to P (Ancona and Lagorio, 2009). types are terms inductive semantics is not enough the system is parametric w.r.t. the resolution method
(Simon et al., 2006): terms and derivations can be cyclic (a.k.a. regular or rational) S-resolution (Komendantskaya and Johann, 2015): coinduction is not limited to cyclic terms and proofs but logic programs must be productive
(Simon et al., 2006): terms and derivations can be cyclic (a.k.a. regular or rational) S-resolution (Komendantskaya and Johann, 2015): coinduction is not limited to cyclic terms and proofs but logic programs must be productive Two different (sound but not complete) implementations for the greatest complete fixed-point semantics. Which one to choose?
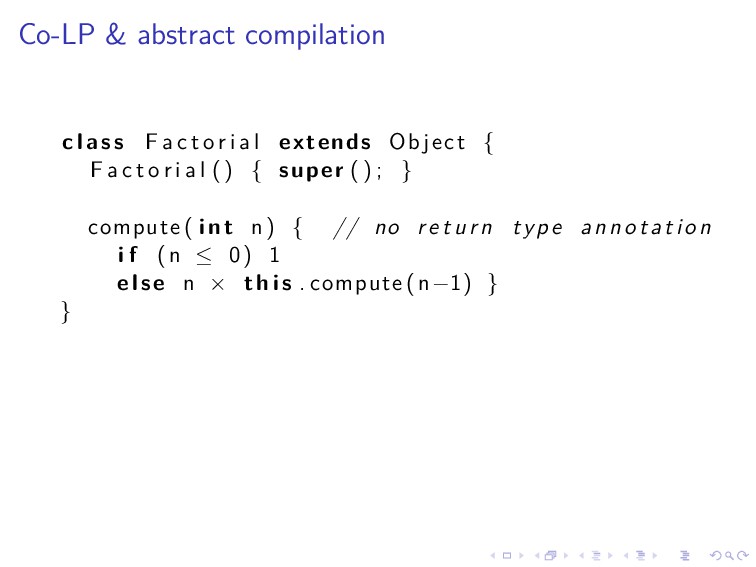
r i a l extends Object { F a c t o r i a l () { super ( ) ; } compute ( int n) { // no r e t u r n type annotation i f (n ≤ 0) 1 else n × t h i s . compute (n−1) } }
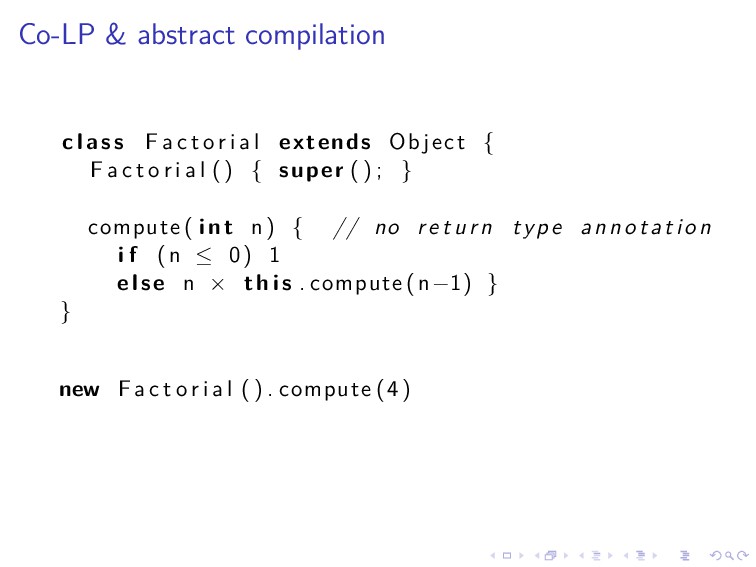
r i a l extends Object { F a c t o r i a l () { super ( ) ; } compute ( int n) { // no r e t u r n type annotation i f (n ≤ 0) 1 else n × t h i s . compute (n−1) } } new F a c t o r i a l ( ) . compute (4)
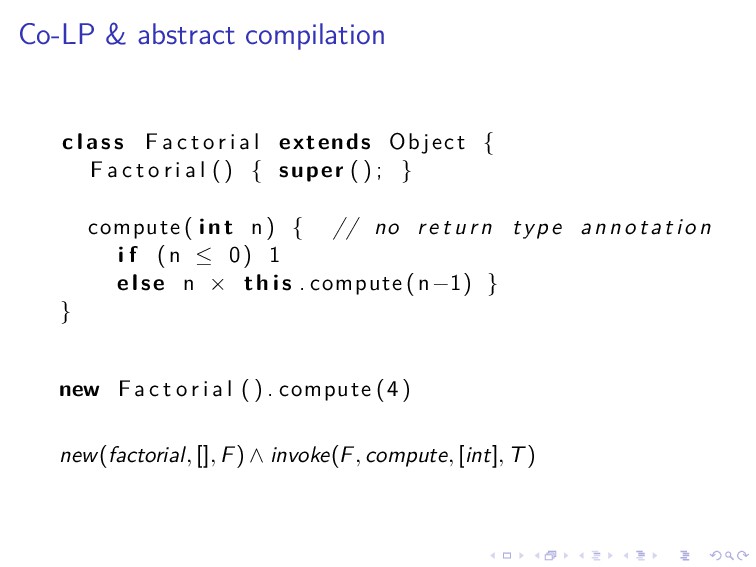
r i a l extends Object { F a c t o r i a l () { super ( ) ; } compute ( int n) { // no r e t u r n type annotation i f (n ≤ 0) 1 else n × t h i s . compute (n−1) } } new F a c t o r i a l ( ) . compute (4) new(factorial, [], F) ∧ invoke(F, compute, [int], T)
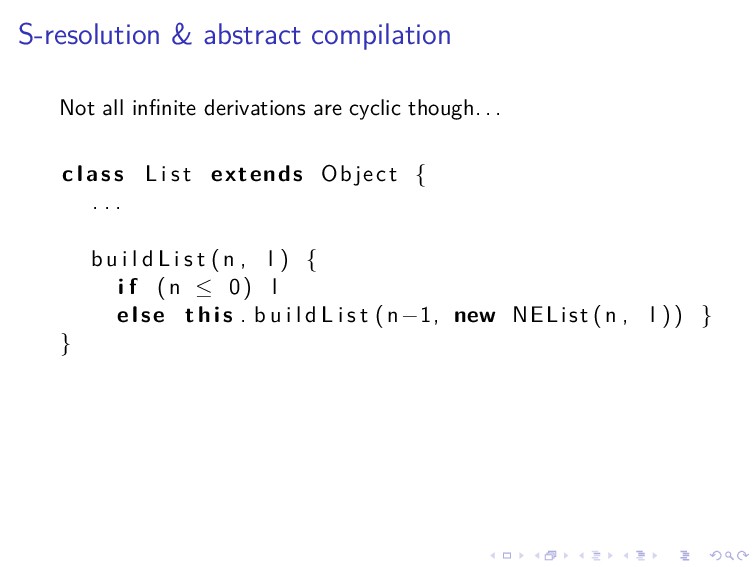
though. . . class L i s t extends Object { . . . b u i l d L i s t (n , l ) { i f (n ≤ 0) l else t h i s . b u i l d L i s t (n−1, new NEList (n , l )) } }
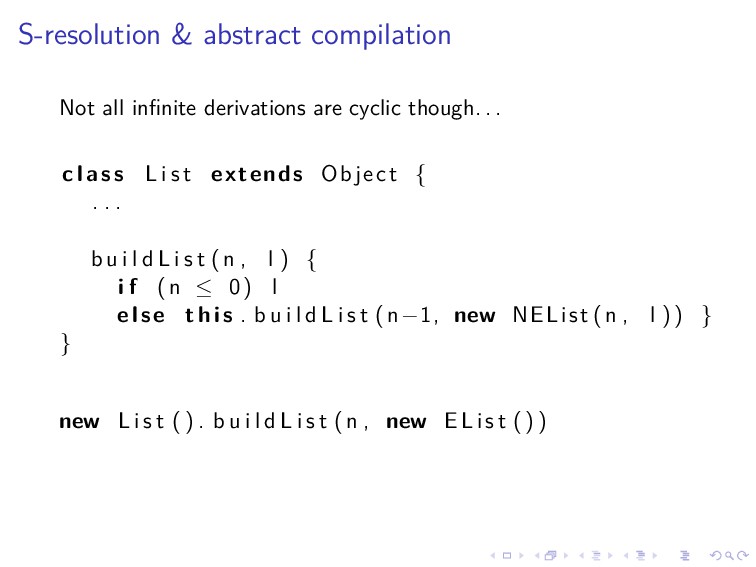
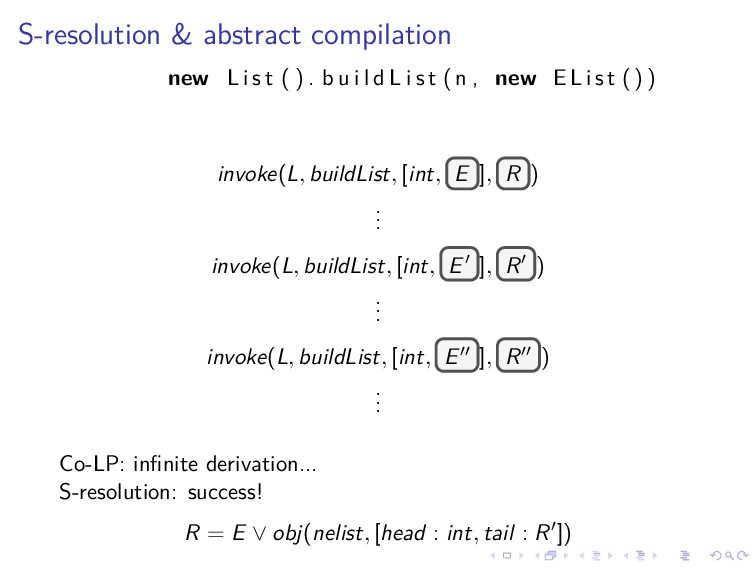
though. . . class L i s t extends Object { . . . b u i l d L i s t (n , l ) { i f (n ≤ 0) l else t h i s . b u i l d L i s t (n−1, new NEList (n , l )) } } new L i s t ( ) . b u i l d L i s t (n , new EList ( ) )
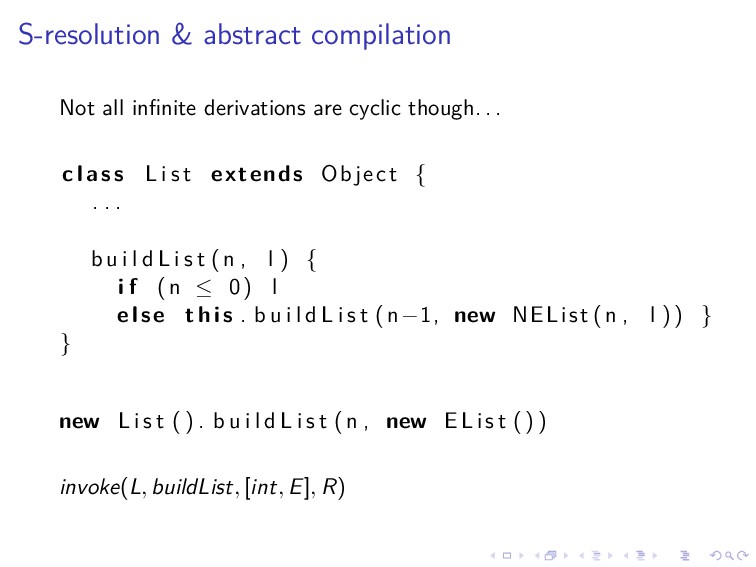
though. . . class L i s t extends Object { . . . b u i l d L i s t (n , l ) { i f (n ≤ 0) l else t h i s . b u i l d L i s t (n−1, new NEList (n , l )) } } new L i s t ( ) . b u i l d L i s t (n , new EList ( ) ) invoke(L, buildList, [int, E], R)
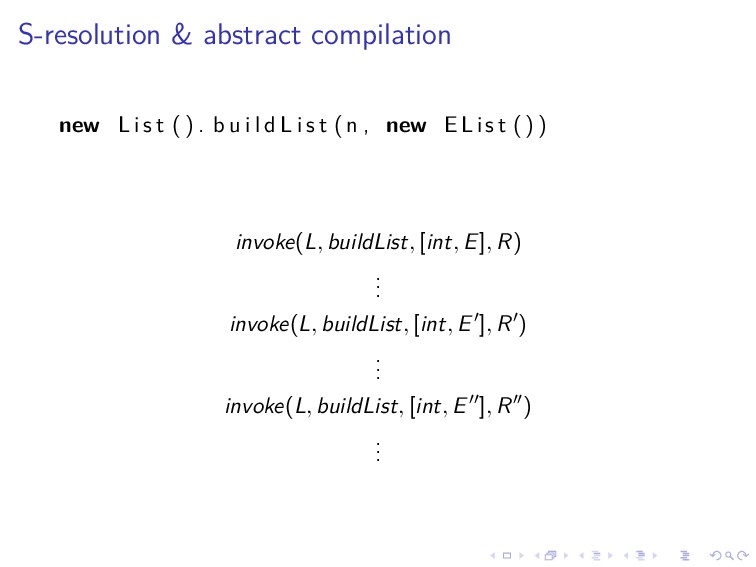
) . b u i l d L i s t (n , new EList ( ) ) invoke(L, buildList, [int, E], R) . . . invoke(L, buildList, [int, E ], R ) . . . invoke(L, buildList, [int, E ], R ) . . .
) . b u i l d L i s t (n , new EList ( ) ) invoke(L, buildList, [int, E ], R ) . . . invoke(L, buildList, [int, E ], R ) . . . invoke(L, buildList, [int, E ], R ) . . . Co-LP: infinite derivation... S-resolution: success! R = E ∨ obj(nelist, [head : int, tail : R ])
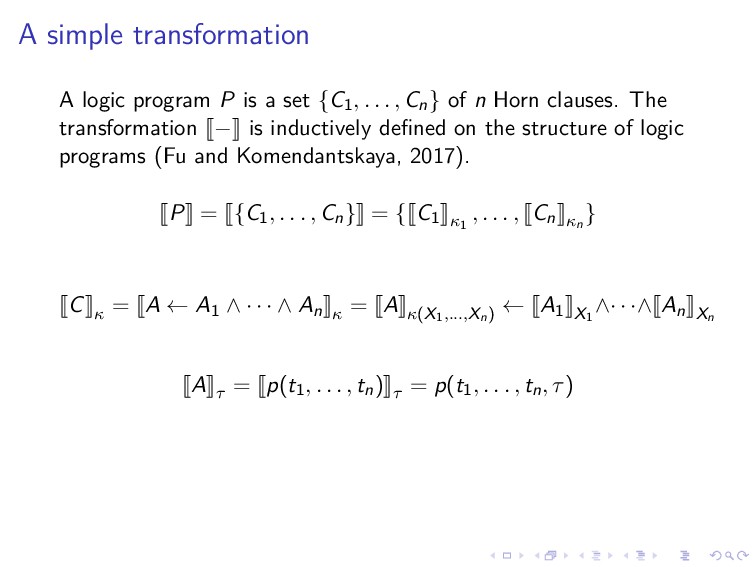
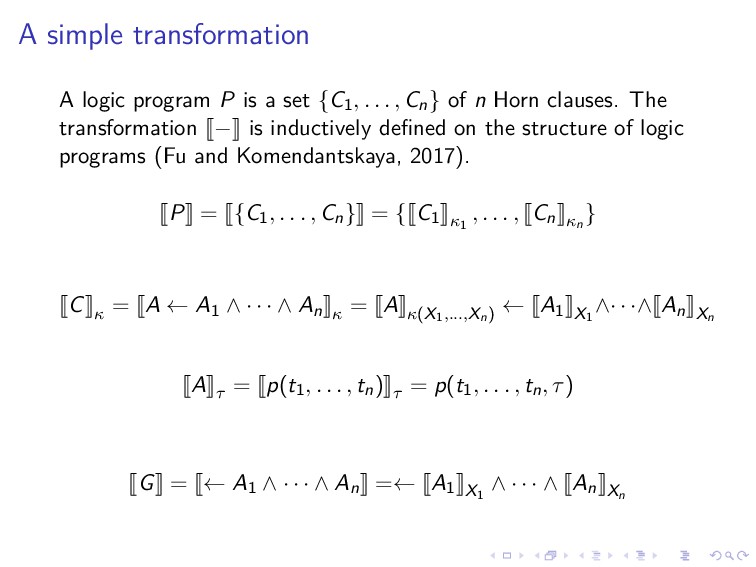
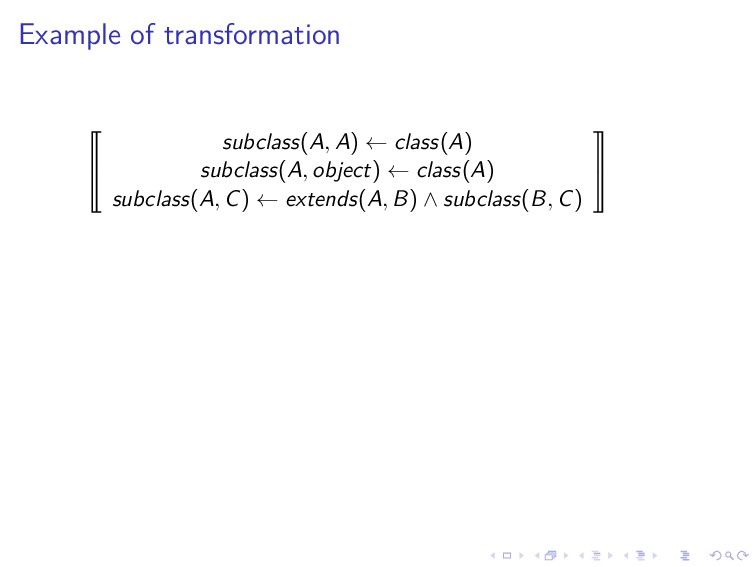
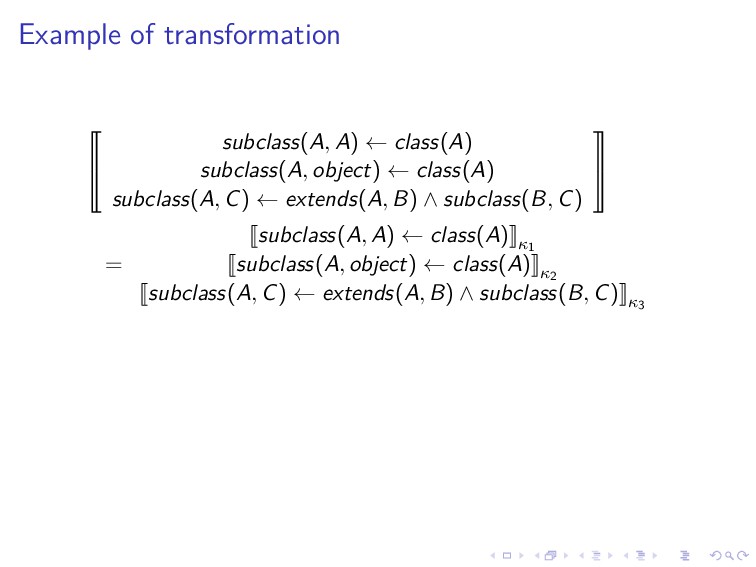
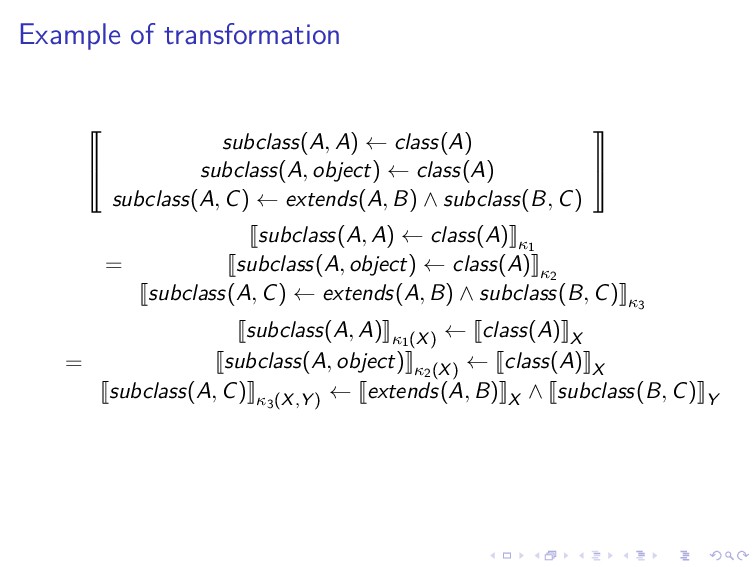
class(A) subclass(A, C) ← extends(A, B) ∧ subclass(B, C) = subclass(A, A) ← class(A) κ1 subclass(A, object) ← class(A) κ2 subclass(A, C) ← extends(A, B) ∧ subclass(B, C) κ3
class(A) subclass(A, C) ← extends(A, B) ∧ subclass(B, C) = subclass(A, A) ← class(A) κ1 subclass(A, object) ← class(A) κ2 subclass(A, C) ← extends(A, B) ∧ subclass(B, C) κ3 = subclass(A, A) κ1(X) ← class(A) X subclass(A, object) κ2(X) ← class(A) X subclass(A, C) κ3(X,Y ) ← extends(A, B) X ∧ subclass(B, C) Y
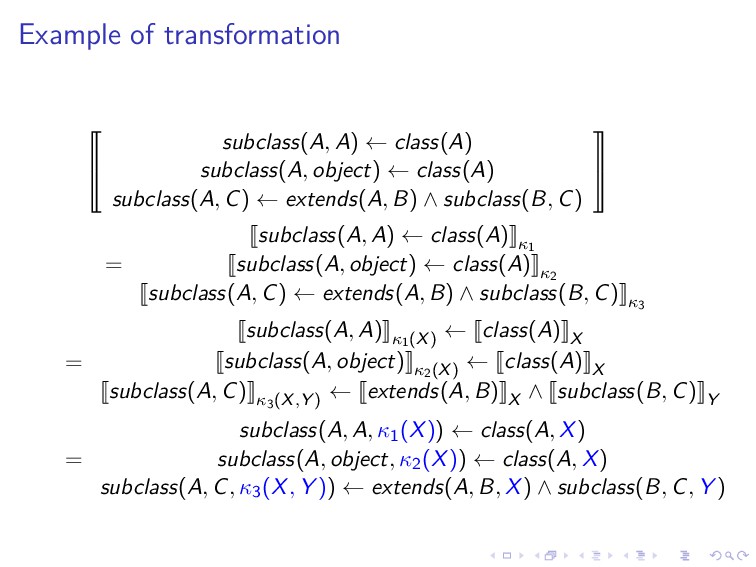
class(A) subclass(A, C) ← extends(A, B) ∧ subclass(B, C) = subclass(A, A) ← class(A) κ1 subclass(A, object) ← class(A) κ2 subclass(A, C) ← extends(A, B) ∧ subclass(B, C) κ3 = subclass(A, A) κ1(X) ← class(A) X subclass(A, object) κ2(X) ← class(A) X subclass(A, C) κ3(X,Y ) ← extends(A, B) X ∧ subclass(B, C) Y = subclass(A, A, κ1(X)) ← class(A, X) subclass(A, object, κ2(X)) ← class(A, X) subclass(A, C, κ3(X, Y )) ← extends(A, B, X) ∧ subclass(B, C, Y )
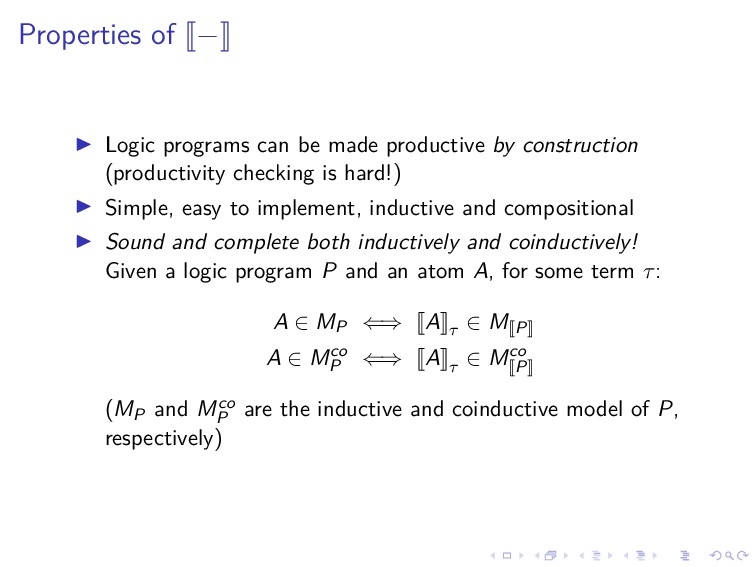
construction (productivity checking is hard!) Simple, easy to implement, inductive and compositional Sound and complete both inductively and coinductively!
construction (productivity checking is hard!) Simple, easy to implement, inductive and compositional Sound and complete both inductively and coinductively! Given a logic program P and an atom A, for some term τ: A ∈ MP ⇐⇒ A τ ∈ M P A ∈ Mco P ⇐⇒ A τ ∈ Mco P (MP and Mco P are the inductive and coinductive model of P, respectively)
1. abstract compilation (object-oriented source logic program) 2. transformation ensuring productivity 3. S-resolution for type-checking/inference queries Pros: very precise static type analysis for object-oriented languages support for parametric and data polymorphism modularity: the system is parametric w.r.t. the resolution method inference and type annotation work together seamlessly
1. abstract compilation (object-oriented source logic program) 2. transformation ensuring productivity 3. S-resolution for type-checking/inference queries Pros: very precise static type analysis for object-oriented languages support for parametric and data polymorphism modularity: the system is parametric w.r.t. the resolution method inference and type annotation work together seamlessly Cons: sometimes inferred types may not have a finite regular representation (probably) undecidable: union and record types together are very expressive
for object-oriented languages. ECOOP, 2009. L. Simon, A. Mallya, A. Bansal and G. Gupta. Coinductive logic programming. ICLP, 2006. E. Komendantskaya and P. Johann. Structural Resolution: a Framework for Coinductive Proof Search and Proof Construction in Horn Clause Logic. Submitted to ACM Transactions in Computational Logic, 2015. P. Fu and E. Komendantskaya. Operational semantics of resolution and productivity in Horn clause logic. Formal Aspects of Computing, 2017.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Co-LP & abstract compilation new(factorial, [], F) ∧ invoke(F, compute,](https://files.speakerdeck.com/presentations/85ce94abc9d8414796d0340bfe3760f5/slide_11.jpg){kind=link}
![Co-LP & abstract compilation new(factorial, [], F) ∧ invoke(F, compute,](https://files.speakerdeck.com/presentations/85ce94abc9d8414796d0340bfe3760f5/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}