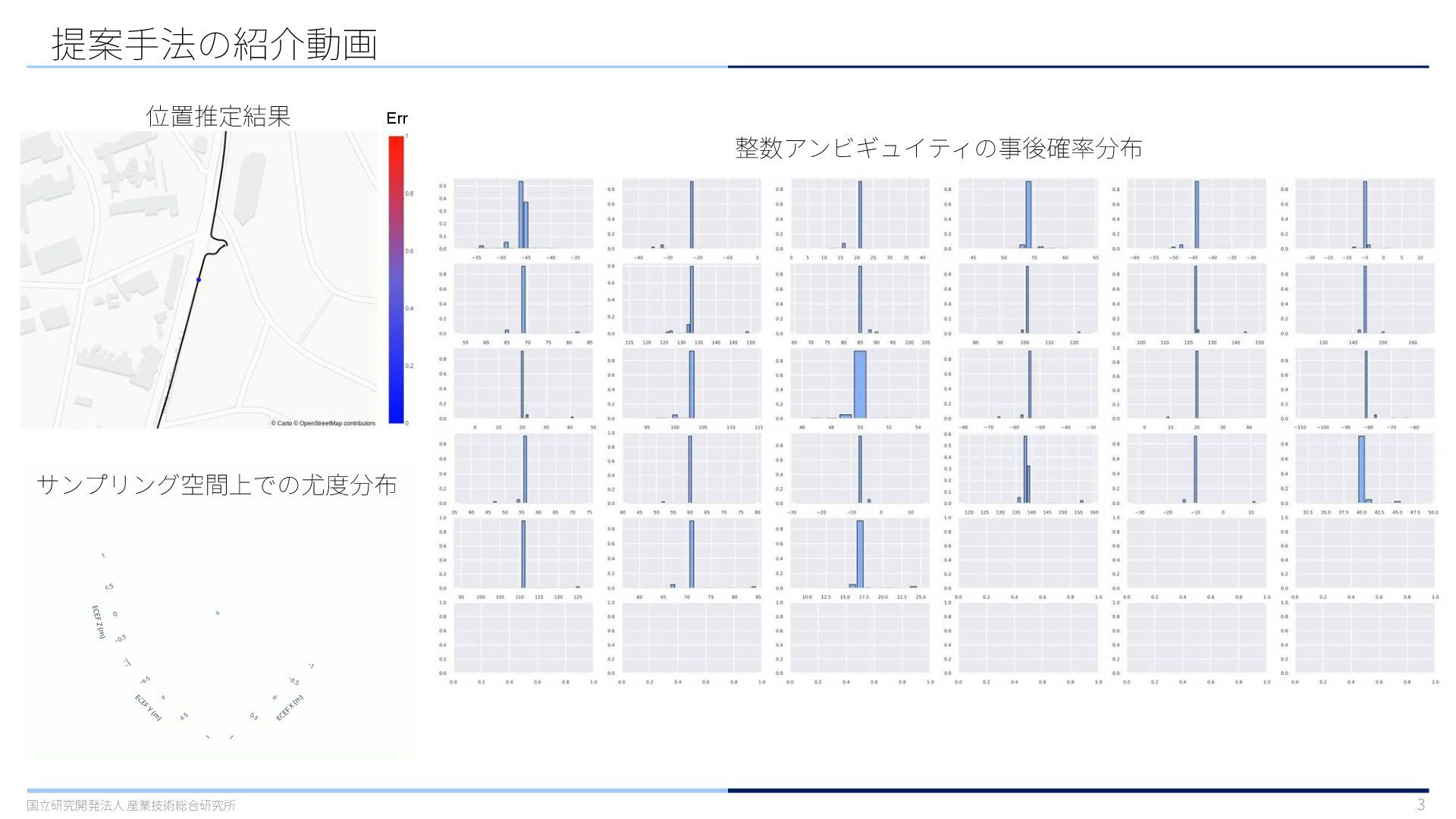
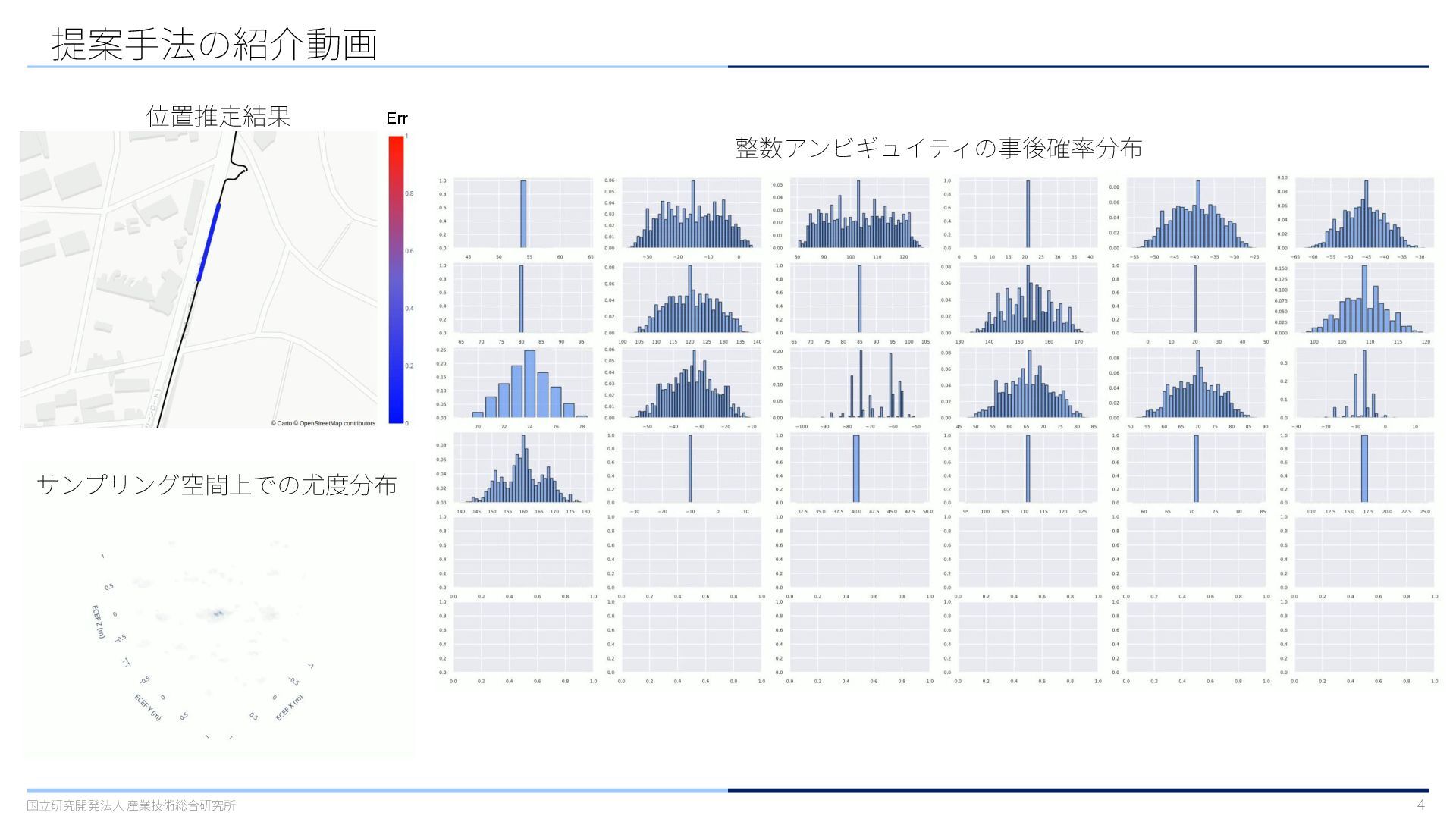
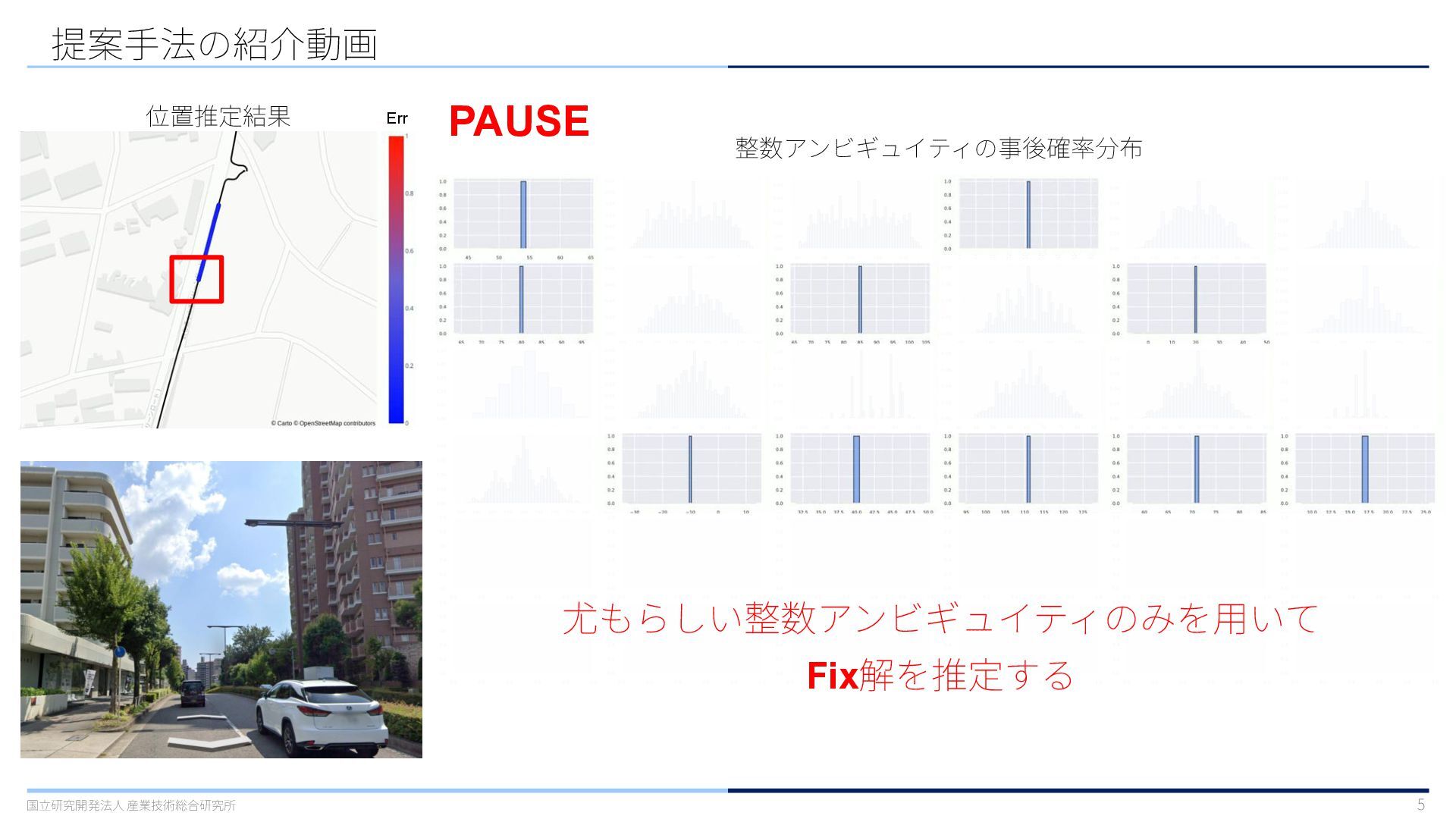
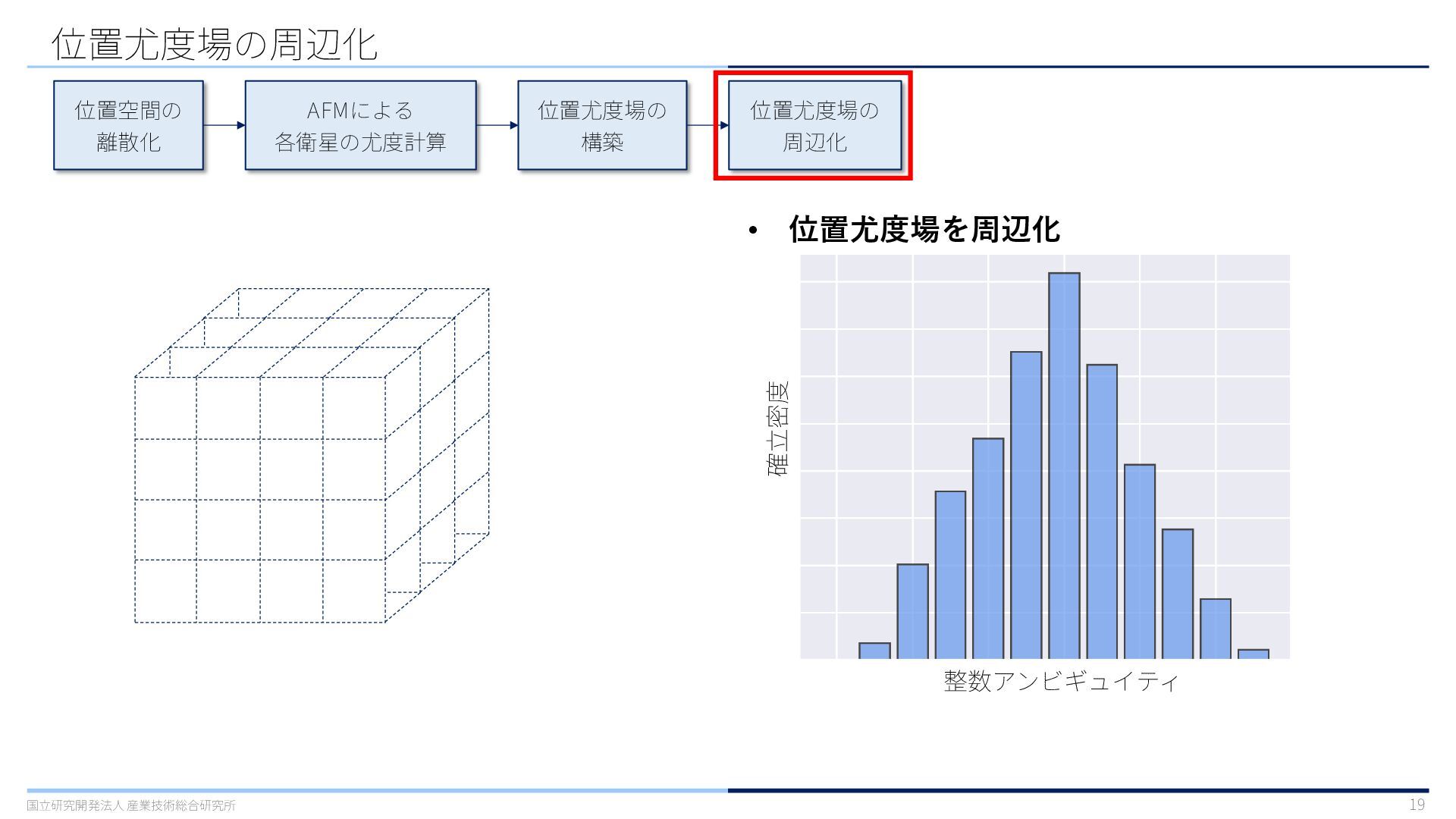
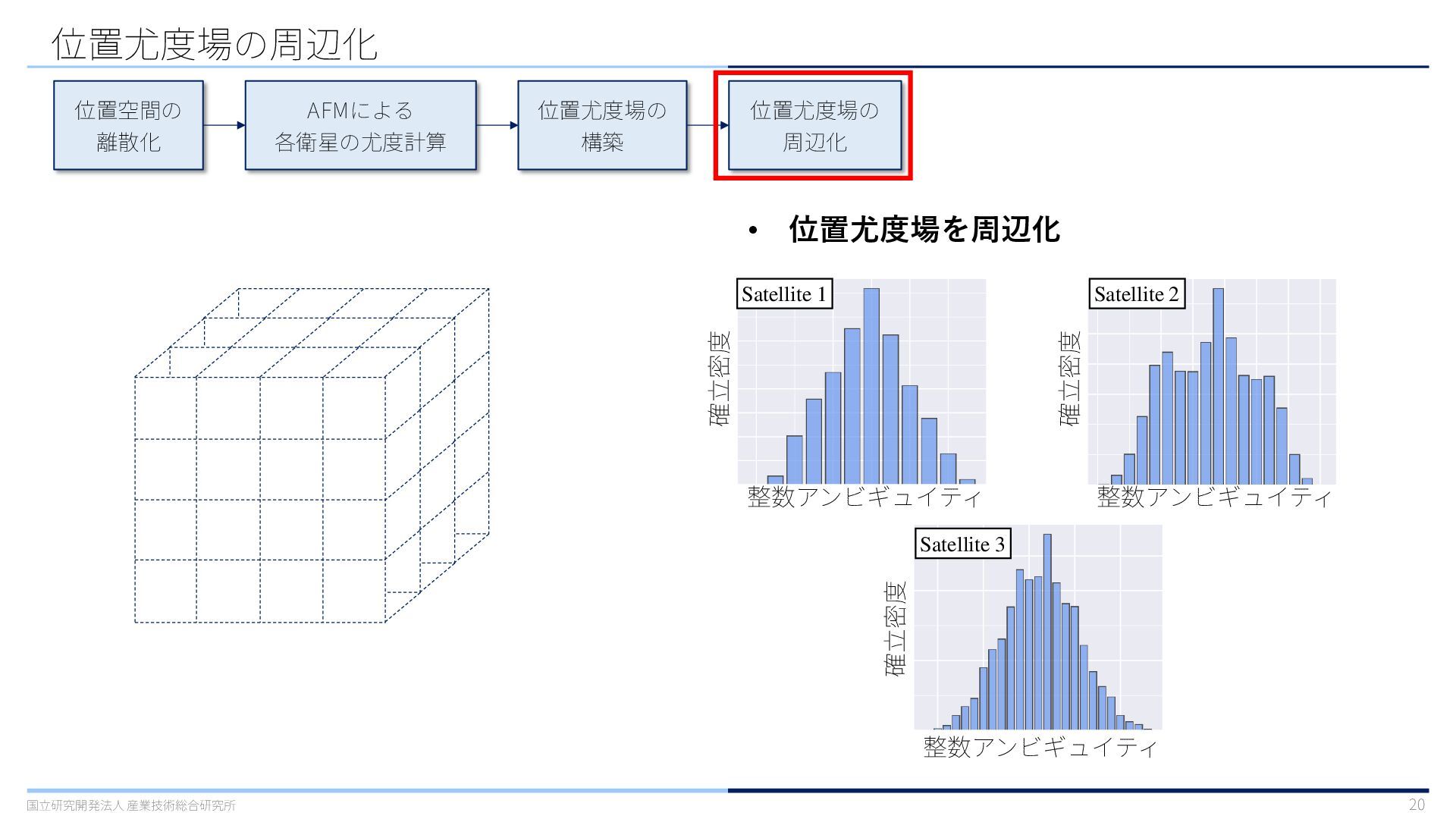
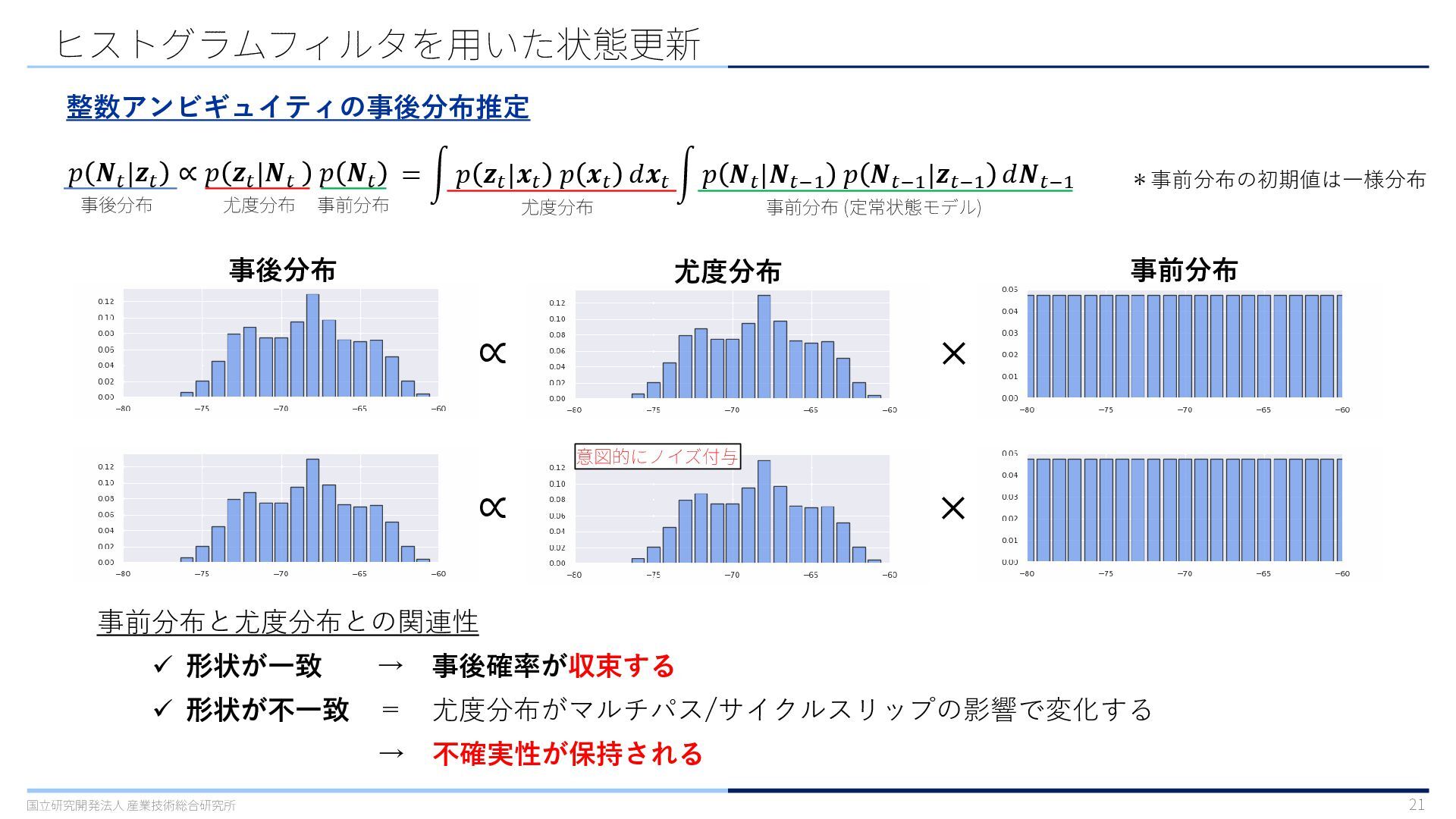
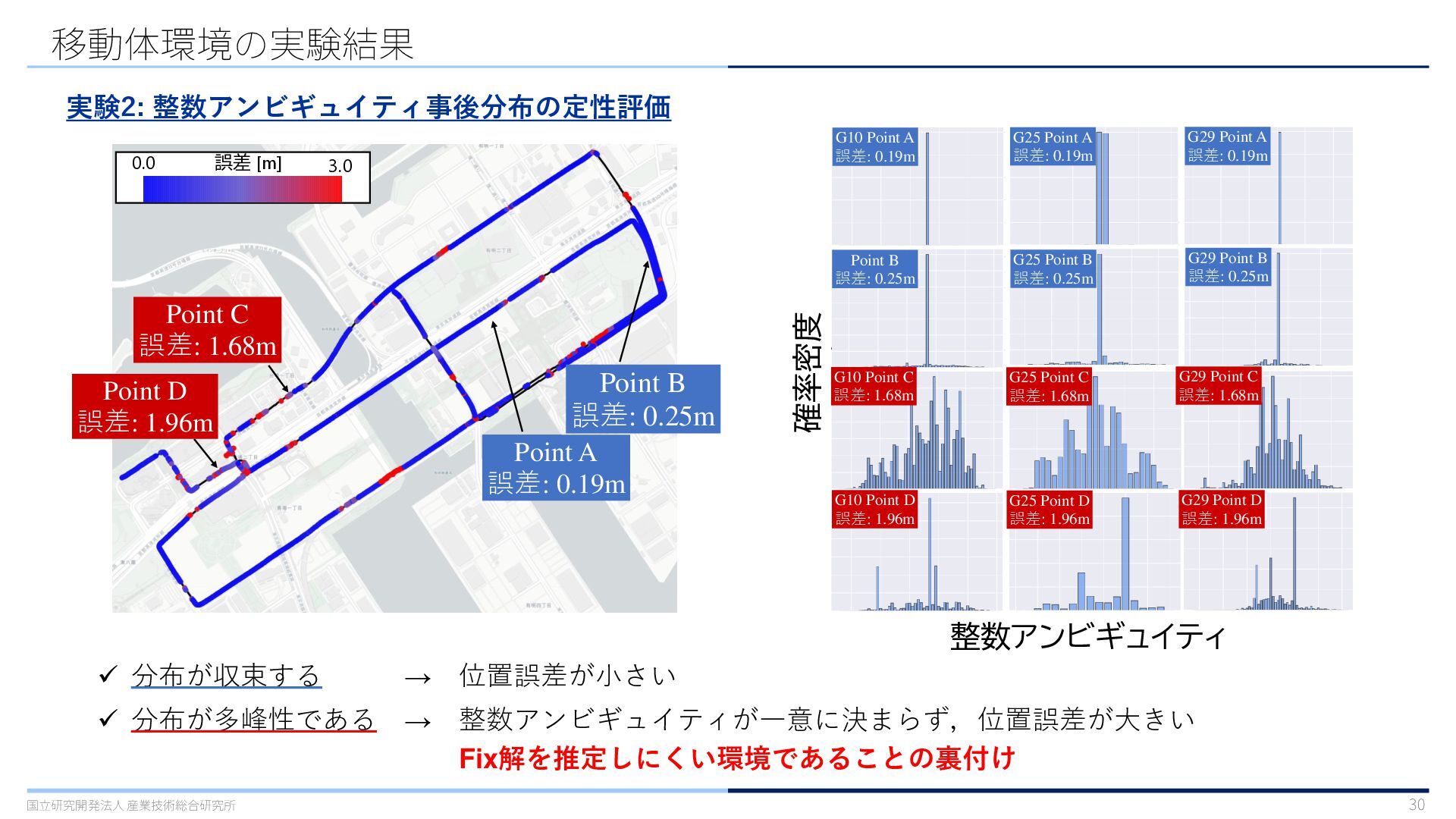
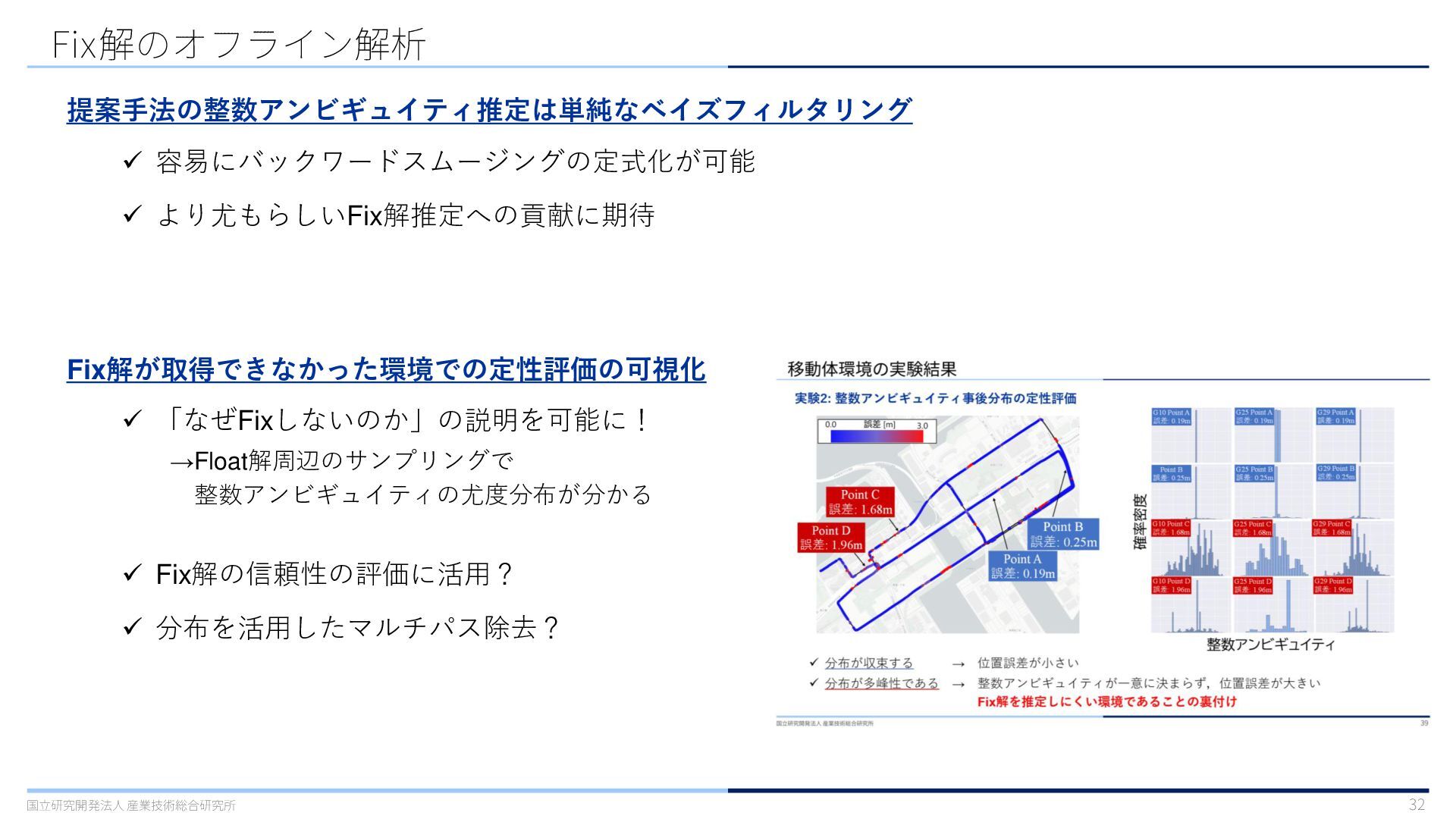
誤差: 0.25m Point C 誤差: 1.68m Point D 誤差: 1.96m 誤差 [m] 0.0 3.0 G10 Point A 誤差: 0.19m G25 Point A 誤差: 0.19m G29 Point A 誤差: 0.19m Point B 誤差: 0.25m G25 Point B 誤差: 0.25m G29 Point B 誤差: 0.25m G10 Point C 誤差: 1.68m G25 Point C 誤差: 1.68m G29 Point C 誤差: 1.68m G10 Point D 誤差: 1.96m G25 Point D 誤差: 1.96m G29 Point D 誤差: 1.96m 整数アンビギュイティ 確率密度 ✓ 分布が収束する → 位置誤差が小さい ✓ 分布が多峰性である → 整数アンビギュイティが一意に決まらず,位置誤差が大きい Fix解を推定しにくい環境であることの裏付け 実験2: 整数アンビギュイティ事後分布の定性評価
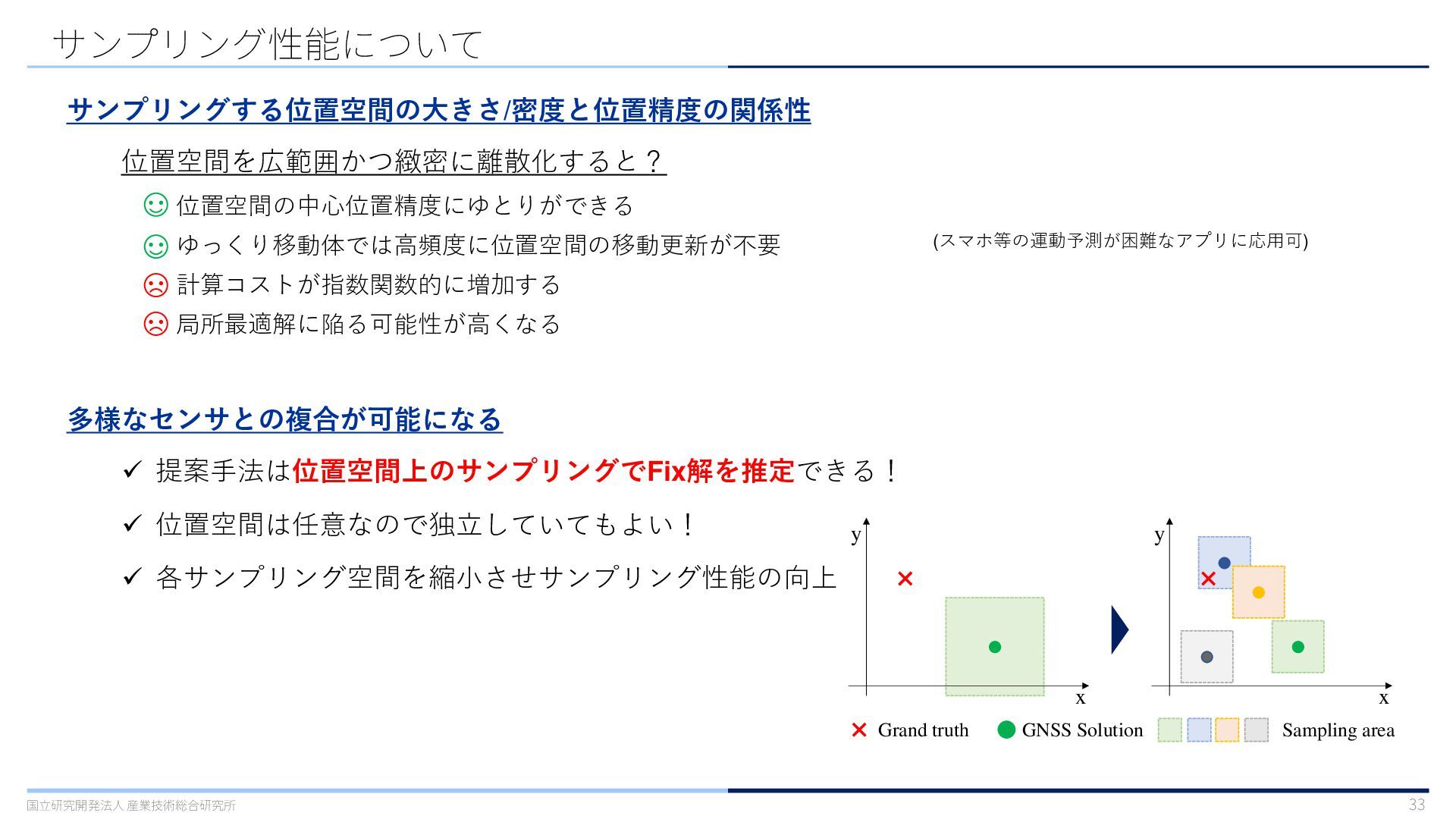
多様なセンサとの複合が可能になる ✓ 提案手法は位置空間上のサンプリングでFix解を推定できる! ✓ 位置空間は任意なので独立していてもよい! ✓ 各サンプリング空間を縮小させサンプリング性能の向上 (スマホ等の運動予測が困難なアプリに応用可) x y x y Grand truth GNSS Solution Sampling area
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}