of seminars is to have enough theoretical background to understand the following papers Julien Mairal et al., Convolutional Kernel Networks. Quoc Viet Le et al., Fastfood: Approximate Kernel Expansions in Loglinear Time. Zichao Yang et al., Deep Fried Convnets. 8 / 125
in collaboration with my study group from the School of Mathematics at UNMSM (Universidad Nacional Mayor de San Marcos, Lima - Perú). I want to thank the members of the group for the great conversations and fun time studying Support Vector Machines at the legendary office 308. DSc. Jose R. Luyo Sanchez (UNMSM). Lic. Diego A. Benavides Vidal (Currently a Master Student at UnB). Bach. Luis E. Quispe Paredes (UNMSM). Also, I want to thank DSc. André M.S. Barreto, my supervisor, for give me the freedom to choose my topic of research. As soon as I finish with my obligatory courses at LNCC, I will start working in Reinforcement Learning. :) 9 / 125
to R3 Case Cover’s Theorem Definitions Preliminaries to Cover’s Theorem Cover’s Theorem References for Cover’s Theorem Mercer’s Theorem Theory of Bounded Linear Operators Integral Operators Preliminaries to Mercer Theorem Mercer’s Theorem References for Mercer’s Theorem Moore-Aronszajn Theorem Reproducing Kernel Hilbert Spaces 11 / 125
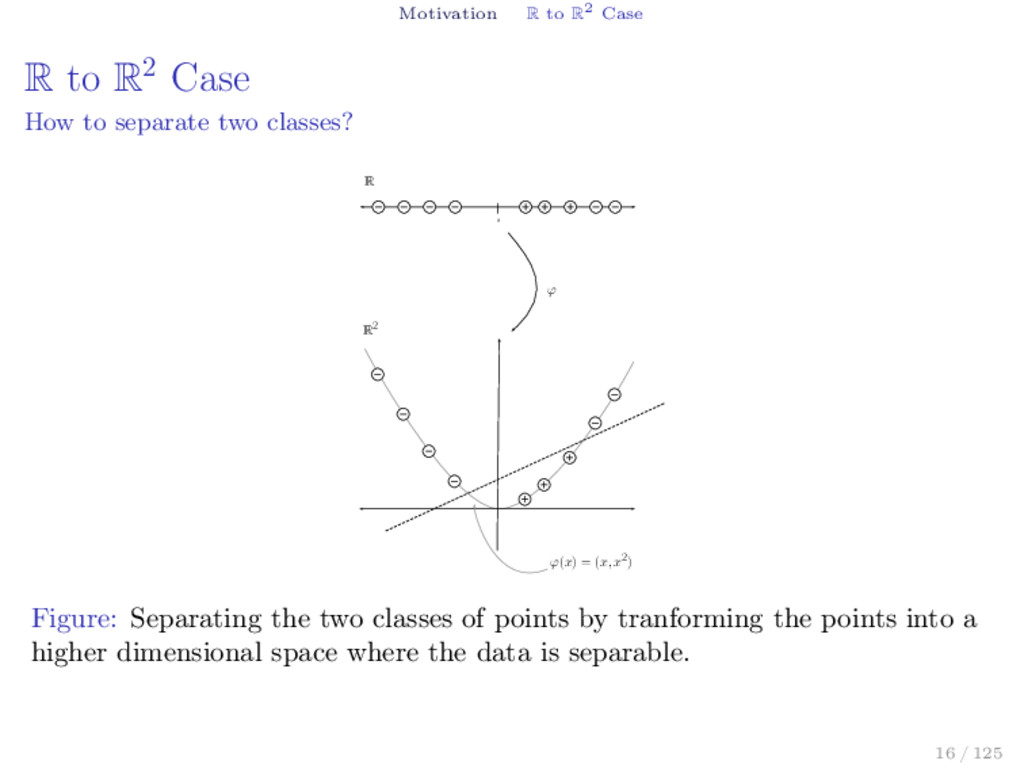
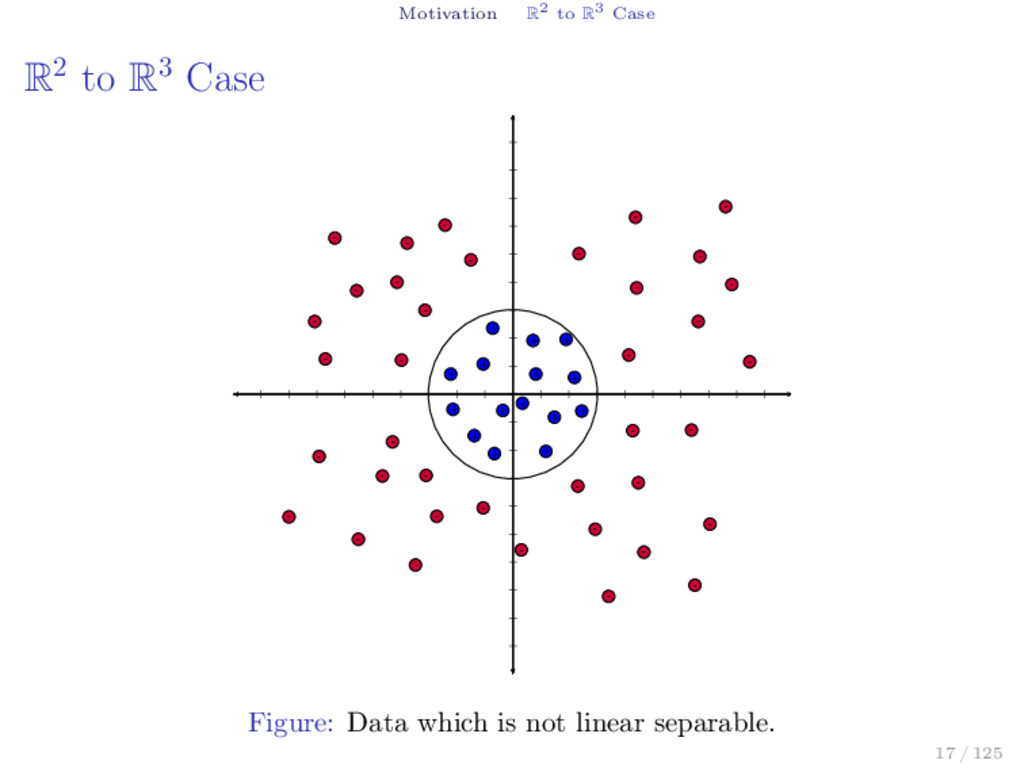
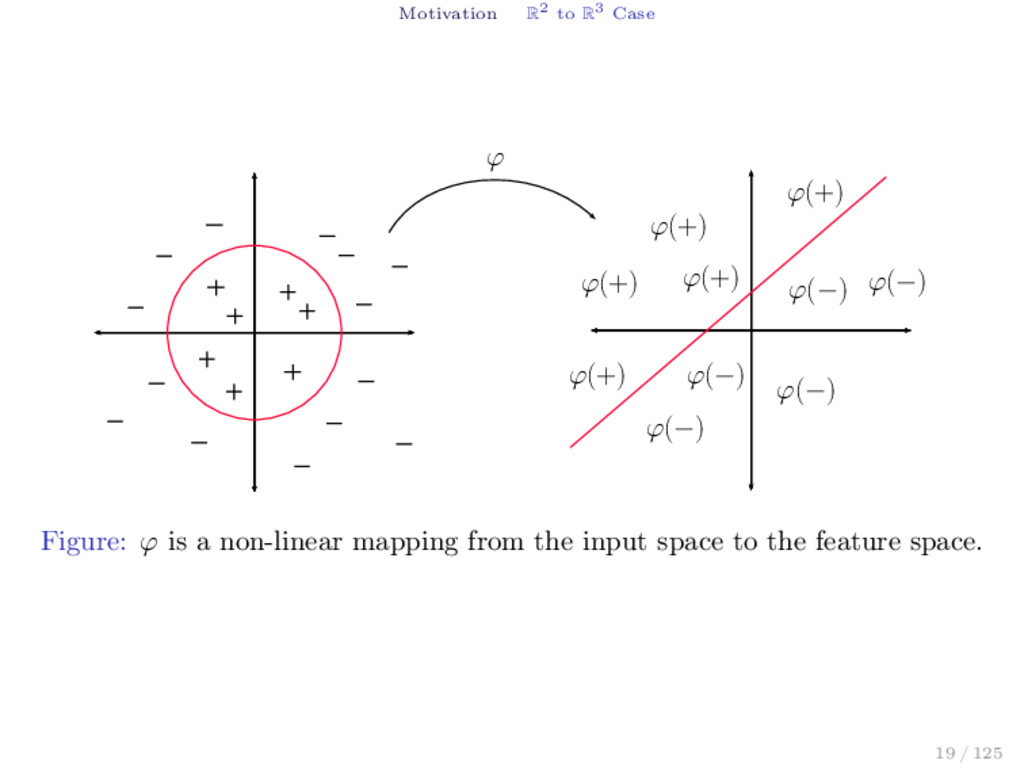
to separate two classes? 0 R R2 ϕ(x) = (x, x 2) ϕ Figure: Separating the two classes of points by tranforming the points into a higher dimensional space where the data is separable. 16 / 125
a set of patterns represented by a set of vectors in a d-dimensional Euclidean space Rd. A homogeneously linear threshold function is defined in terms of a parameter vector w for every vector x in Rd as fw : Rd → {−1, 0, 1} x → fw (x) = 1, If w, x > 0 0, If w, x = 0 −1, If w, x < 0 Note: The function fw can be written as fw (x) = sign( w, x ). 22 / 125
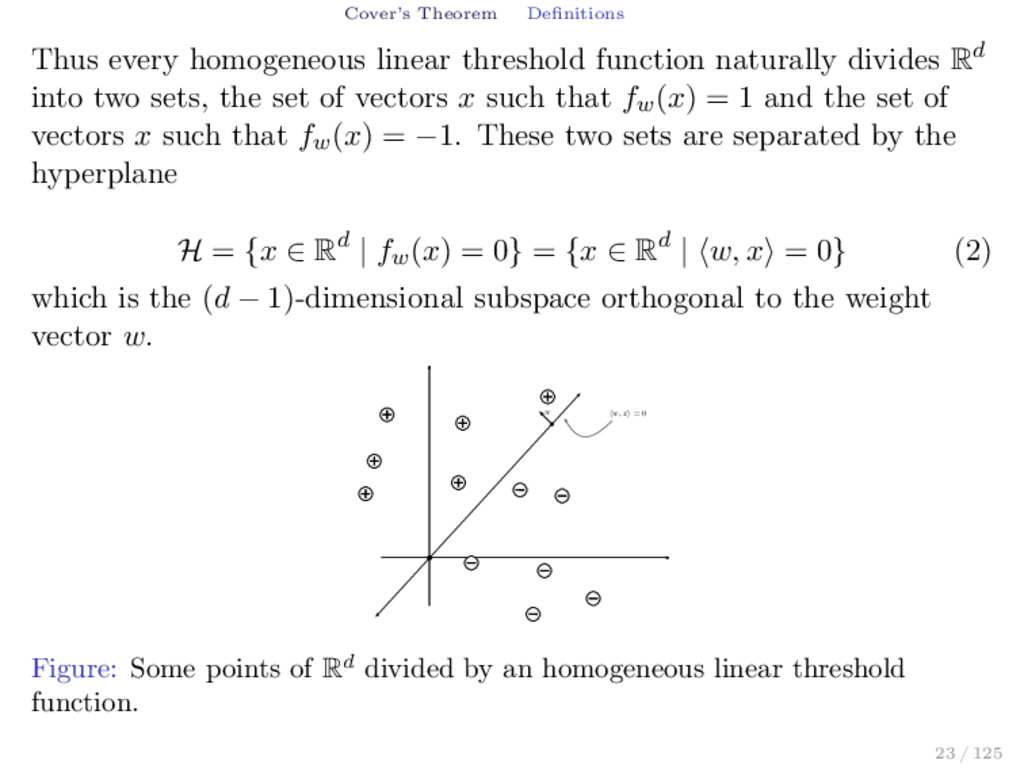
divides Rd into two sets, the set of vectors x such that fw (x) = 1 and the set of vectors x such that fw (x) = −1. These two sets are separated by the hyperplane H = {x ∈ Rd | fw (x) = 0} = {x ∈ Rd | w, x = 0} (2) which is the (d − 1)-dimensional subspace orthogonal to the weight vector w. w w, x = 0 Figure: Some points of Rd divided by an homogeneous linear threshold function. 23 / 125
{X+, X−}, a binary partition1, of X is linearly separable if and only if there exists a weight vector w in Rd and scalar b = 0 such that w, x > b, if x ∈ X+ w, x < b, if x ∈ X− Definition 2.3 (Homogeneously Linearly Separable Dichotomies) Let X be an arbitrary set of vectors in Rd. A dichotomy {X+, X−}, a binary partition, of X is homogeneously linearly separable if and only if there exists a weight vector w in Rd such that w, x > 0, if x ∈ X+ w, x < 0, if x ∈ X− 1X = X+ ∪ X− and X+ ∩ X− = ∅. 24 / 125
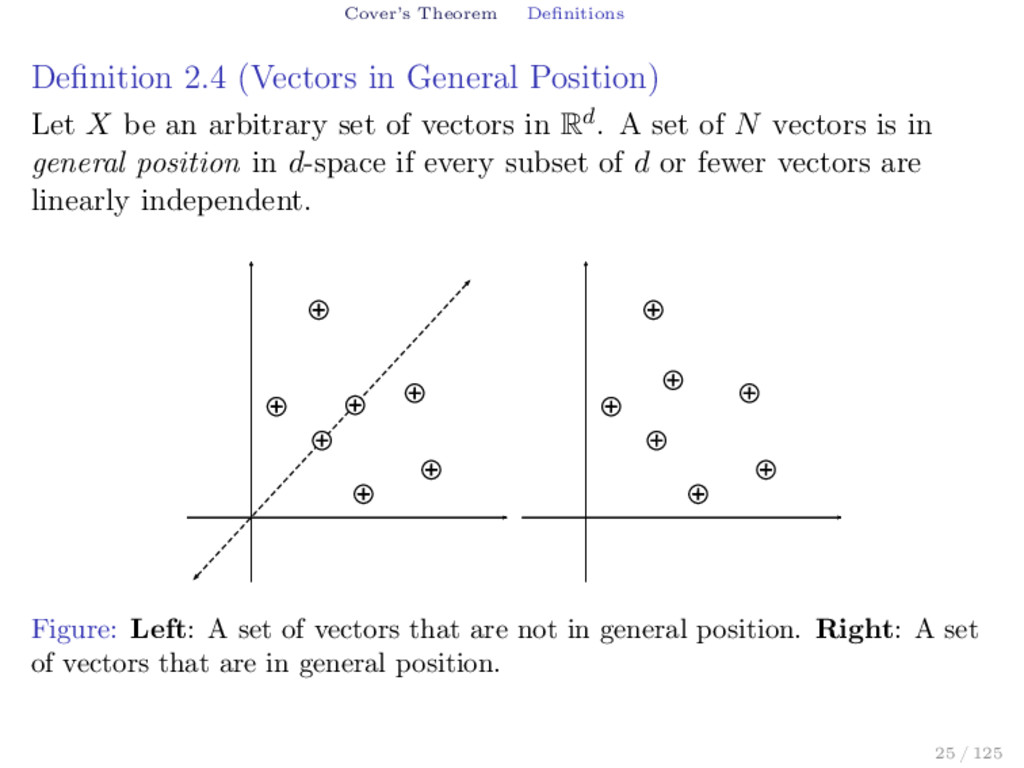
X be an arbitrary set of vectors in Rd. A set of N vectors is in general position in d-space if every subset of d or fewer vectors are linearly independent. Figure: Left: A set of vectors that are not in general position. Right: A set of vectors that are in general position. 25 / 125
and X+ subsets of Rd, and let y a point other than the origin in Rd. Then the dichotomies {X+ ∪ {y}, X−} and {X+, X− ∪ {y}} are both homogeneously linear separable if and only if {X+, X−} is homogeneously linear separable by a (d − 1)-dimensional subspace2containing y. Proof. Let W the set of separable vectors for {X+, X−} given by W = w ∈ Rd | w, x > 0, x ∈ X+ ∧ w, x < 0, x ∈ X− (3) The set W can be rewritten as W = w ∈ Rd | w, x > 0, x ∈ X+ w ∈ Rd| w, x < 0, x ∈ X− (4) 2(d − 1)−dimensional subspace is an hyperplane. 26 / 125
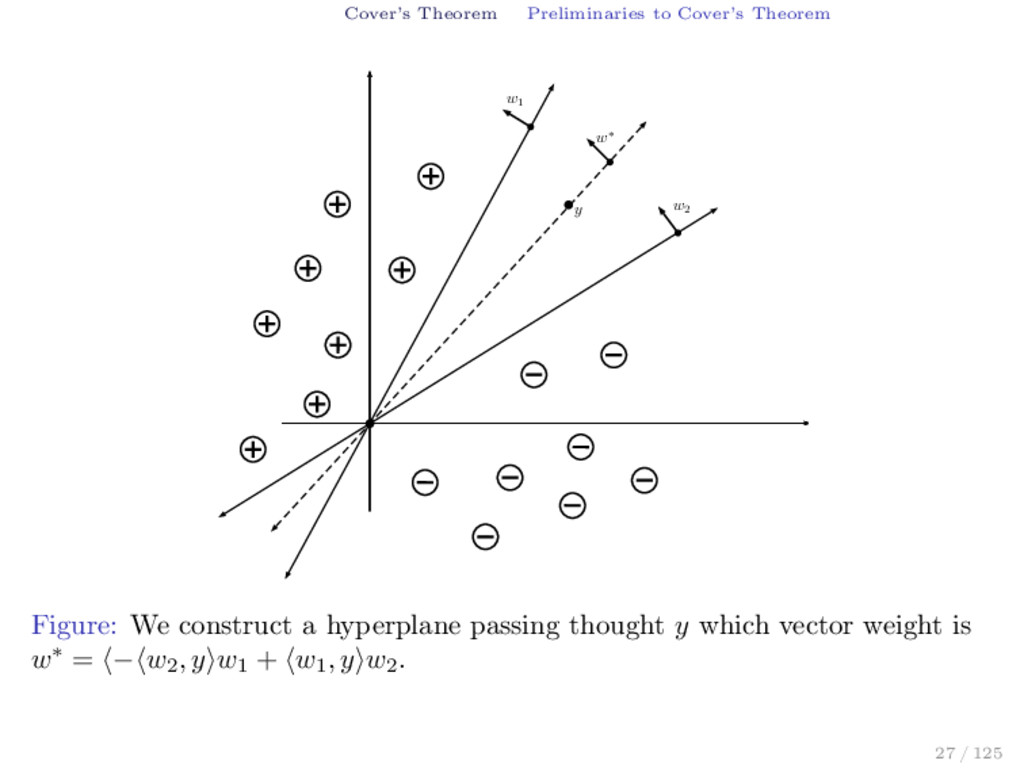
{y}, X−} is homogeneously separable if and only if there is a vector w in W such that w, y > 0 and the dichotomy {X+, X− ∪ {y}} is homogeneously linearly separable if and only if there is a w in W such that w, y < 0. If {X+ ∪ {y}, X−} and {X+, X− ∪ {y}} are homogeneously separable by w1 and w2 respectively, then we can construct a w∗ as w∗ = − w2 , y w1 + w1 , y w2 (5) such that separates {X+, X−} by the hyperplane H = {x ∈ Rd | w∗, x = 0} passing thought y. We affirm that y belongs to H. Indeed, w∗, y = − w2 , y w1 + w1 , y w2 , y = − w2 , y w1 , y + w1 , y w2 , y = 0 28 / 125
x > 0 if x in X+. In fact, let x in X+ then w∗, x = − w2 , y w1 + w1 , y w2 , x = − w2 , y >0 w1 , x >0 + w1 , y >0 w2 , x >0 > 0 then w∗, x > 0 for all x in X+. We affirm that w∗, x < 0 if x in X−. In fact, let x in X− then w∗, x = − w2 , y w1 + w1 , y w2 , x = − w2 , y <0 w1 , x >0 + w1 , y >0 w2 , x <0 < 0 then w∗, x < 0 for all x in X−. We conclude that {X+, X−} is homogeneously separable by the vector w∗. 29 / 125
is homogeneously linear separable by an hypeplane containing y then there exists w∗ in W such that w∗, y = 0. We affirm that W is an open set. In fact, the set W can be rewritten as W = x∈X+ {w ∈ Rd | w, x > 0} x∈X− {w ∈ Rd | w, x < 0} (6) and the complement of this set is Wc = x∈X+ {w ∈ Rd | w, x ≤ 0} x∈X− {w ∈ Rd | w, x ≥ 0} (7) The sets {w ∈ Rd | w, x ≤ 0}, x ∈ X+ and {w ∈ Rd | w, x ≥ 0}, x ∈ X− are clearly closed due to the continuity of the inner product then the finite union of closed sets is closed so we can conclude that the set Wc is closed therefore W is an open set. 30 / 125
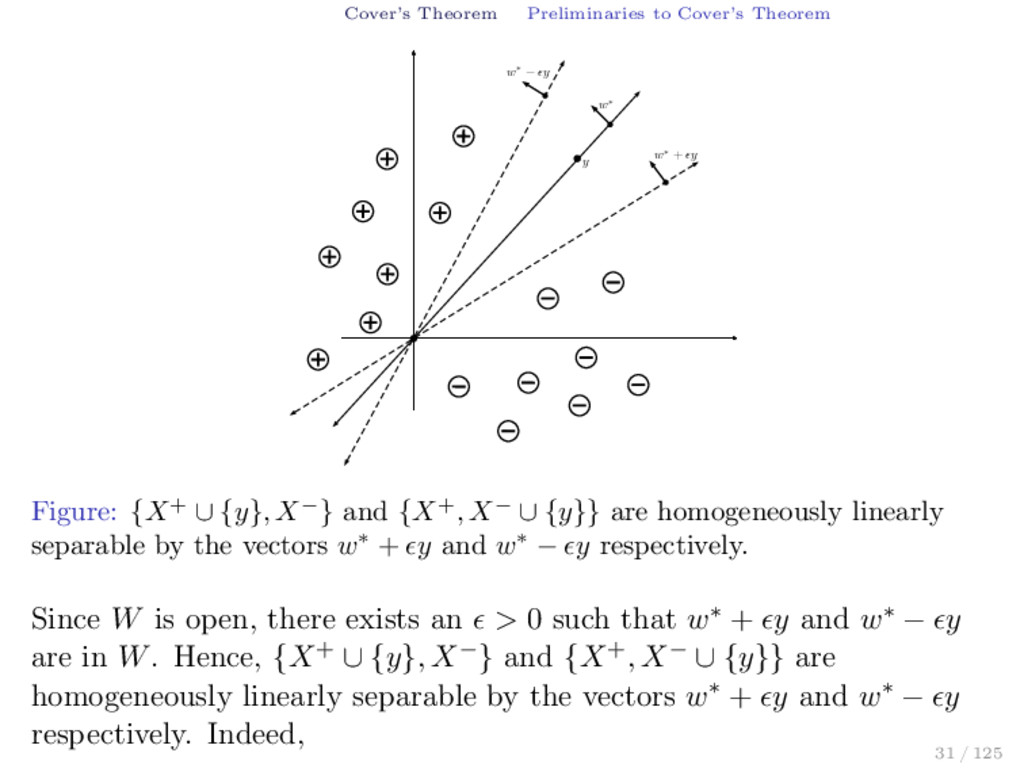
w∗ + ǫy w∗ Figure: {X+ ∪ {y}, X−} and {X+, X− ∪ {y}} are homogeneously linearly separable by the vectors w∗ + y and w∗ − y respectively. Since W is open, there exists an > 0 such that w∗ + y and w∗ − y are in W. Hence, {X+ ∪ {y}, X−} and {X+, X− ∪ {y}} are homogeneously linearly separable by the vectors w∗ + y and w∗ − y respectively. Indeed, 31 / 125
{X+ ∩ {y}, X−} is homegenously linear separable by w∗ + y. We affirm that w∗ + y, y > 0. In fact, w∗ + y, y = w∗, y =0 + y, y (8) = y 2 (9) > 0 (10) Therefore, w∗ + y, y > 0. Hence, {X+ ∪ {y}, X−} is homogeneously linearly separable by w∗ + y. 32 / 125
{X+, X− ∩ {y}} is homegenously linear separable by w∗ − y. We affirm that w∗ − y, y < 0. In fact, w∗ + y, y = w∗, y =0 + y, y (11) = − y 2 (12) < 0 (13) Therefore, w∗ + y, y < 0. Hence, {X+, X− ∪ {y}} is homogeneously linearly separable by w∗ − y. 33 / 125
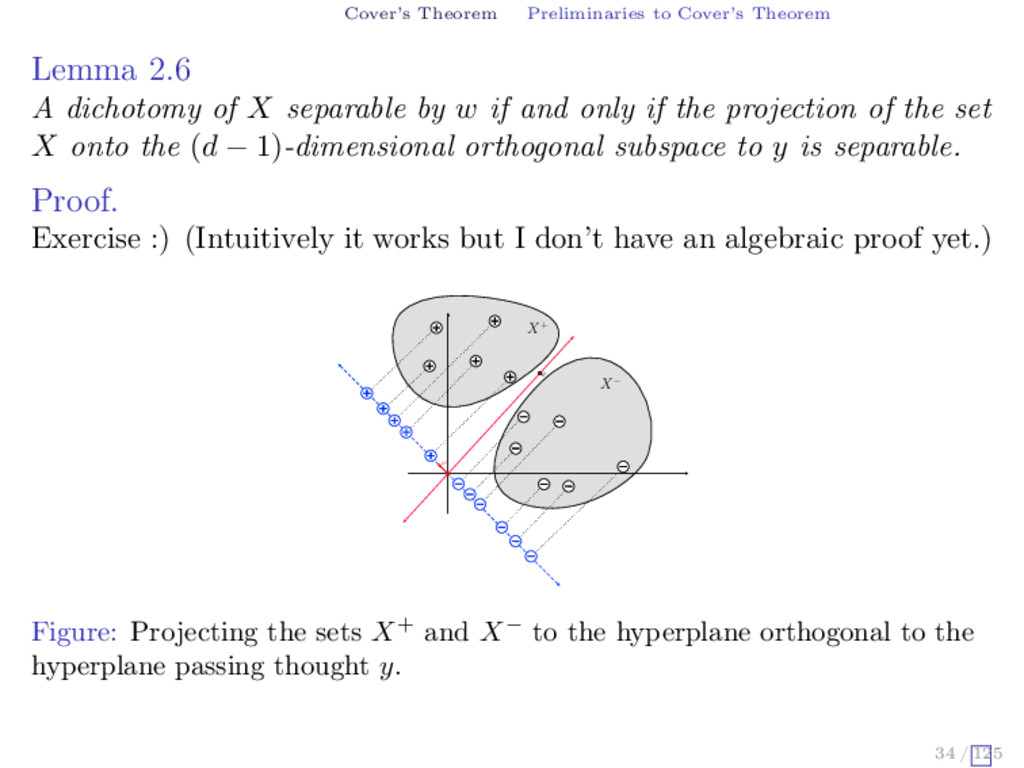
of X separable by w if and only if the projection of the set X onto the (d − 1)-dimensional orthogonal subspace to y is separable. Proof. Exercise :) (Intuitively it works but I don’t have an algebraic proof yet.) y w X+ X− Figure: Projecting the sets X+ and X− to the hyperplane orthogonal to the hyperplane passing thought y. 34 / 125
There are C(N, d) homogeneously linearly separable dichotomies of N points in general position in Euclidean d-space, where C(N, d) = 2 d−1 k=0 N−1 k , if N > d + 1 2N , if N ≤ d + 1 (14) Proof. To proof the theorem, we will use induction on N and d. Let C(N, d) be the number of homogeneously linearly separable dichotomies of the set X = {x1 , x2 , . . . , xN }. The base induction step is true because C(1, d) = 2 if d ≥ 1 and C(N, 1) = 2 if N ≥ 1. Now, let’s prove that the theorem is true for N + 1 points. Consider a new point xN+1 such that X ∪ {xN+1 } is in general position and consider the C(N, d) homogeneously linearly separable dichotomies {X+, X−} of X. 35 / 125
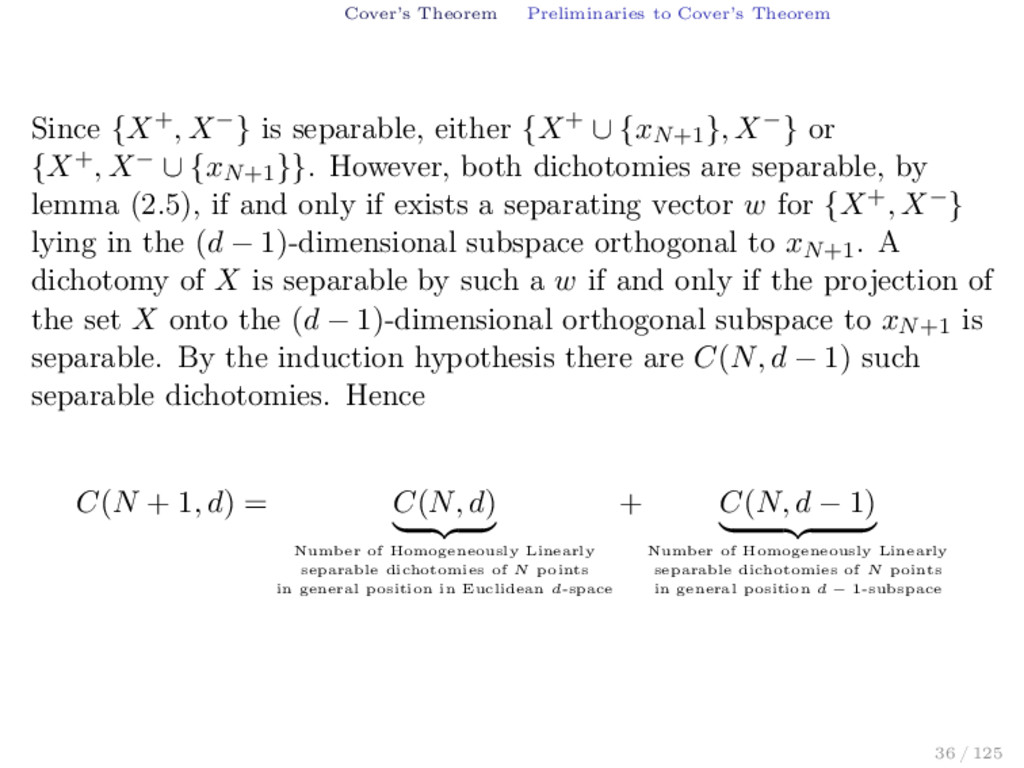
separable, either {X+ ∪ {xN+1 }, X−} or {X+, X− ∪ {xN+1 }}. However, both dichotomies are separable, by lemma (2.5), if and only if exists a separating vector w for {X+, X−} lying in the (d − 1)-dimensional subspace orthogonal to xN+1. A dichotomy of X is separable by such a w if and only if the projection of the set X onto the (d − 1)-dimensional orthogonal subspace to xN+1 is separable. By the induction hypothesis there are C(N, d − 1) such separable dichotomies. Hence C(N + 1, d) = C(N, d) Number of Homogeneously Linearly separable dichotomies of N points in general position in Euclidean d-space + C(N, d − 1) Number of Homogeneously Linearly separable dichotomies of N points in general position d − 1-subspace 36 / 125
= C(N, d) + C(N, d − 1) = 2 d−1 k=0 N − 1 k + d−2 k=0 N − 1 k = 2 N − 1 0 + d−1 k=1 N − 1 k + N − 1 k − 1 = 2 N 0 + d−1 k=1 N k = 2 d−1 k=0 N k 37 / 125
in the pattern recognition problem: The pattern are fixed in position but are classified independently with equal probability into one of two categories. The patterns themselves are randomly distributed in space, and the desired dichotomization maybe random or fixed. Suppose that the dichotomy of X = {x1 , x2 , . . . , xN } is chosen are random with equal probability from the 2N equiprobable possible dichotomies of X. Let P(N, d) be the probability that the random dichotomy is linear separable. P(N, d) = C(N, d) 2N = 1 2 N−1 d−1 k=0 N−1 k , if N > d + 1 1, if N ≤ d + 1 (16) 39 / 125
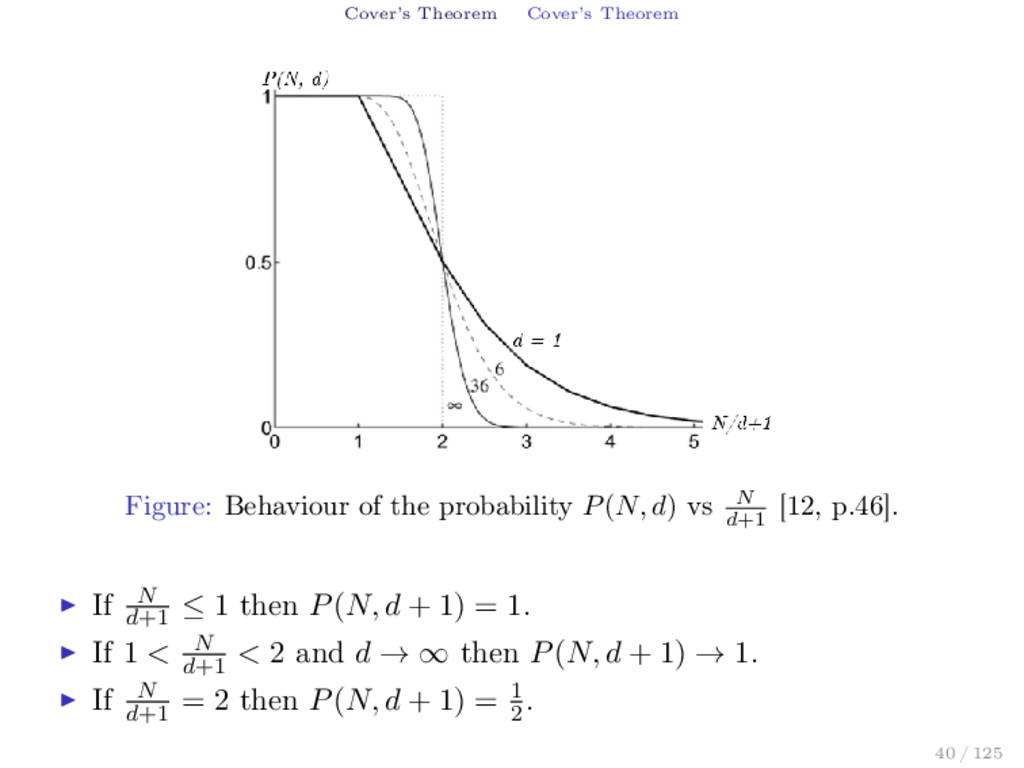
d) vs N d+1 [12, p.46]. If N d+1 ≤ 1 then P(N, d + 1) = 1. If 1 < N d+1 < 2 and d → ∞ then P(N, d + 1) → 1. If N d+1 = 2 then P(N, d + 1) = 1 2 . 40 / 125
pattern classification problem cast in a high-dimensional space nonlinearly, is more likely to be linearly separable than in a low-dimensional space. 41 / 125
[7] Thomas Cover. “Geometrical and Statistical properties of systems of linear inequalities with applications in pattern recognition”. In: IEEE Transactions on Electronic Computer (), pp. 326–334. Minor Sources: [12] Ke-Lin Du and M. N. S. Swamy. Neural Networks and Statistical Learning. Springer Science & Business Media, 2013. [19] Simon Haykin. Neural Networks and Learning Machines. Third Edition. Pearson Prentice Hall, 2009. [39] Bernhard Schlköpf and Alexander Smola. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond. The MIT Press, 2001. [49] Sergios Theodoridis. Machine Learning: A Bayesian and Optimization Perspective. Academic Press, 2015. 42 / 125
k a continous function in [a, b] × [a, b] such that b a b a k(t, s)f(s)f(t) ds dt ≥ 0 (17) for all f in L2([a, b]), then, for all t and s in [a, b] the series k(t, s) = ∞ j=1 λj ϕj (t)ϕj (s) converges absolutely and uniformly in the set [a, b] × [a, b]. 44 / 125
Let k a measurable function in the set [a, b] × [a, b], then the integral operator K associated to the function k is defined by K : Γ → Ω f → (Kf)(t) := b a k(t, s)f(s) ds where Γ and Ω are space of functions. This operator is well defined whenever the integral exists. 45 / 125
complex Lebesgue function in L2([a, b] × [a, b]) and let K the integral operator associated to the function k defined by K : L2 ([a, b]) → L2 ([a, b]) f → (Kf)(t) = b a k(t, s)f(s) ds then the following affirmations are hold 1. The integral exists. 2. The integral operator associated to k is well defined. 3. The integral operator associated to k is linear. 4. The integral operator associated to k is a bounded operator. Skip Proof 46 / 125
for almost every s in [a, b] the functions k(t, .) and f(.) are Lebesgue measurable functions in [a, b]. 2. To proof that the integral operator K is well defined we have to show that the image of the operator is contained in L2([a, b]). Indeed, because k is in L2([a, b] × [a, b]) then k 2 L2([a,b]×[a,b]) = b a b a |k(t, s)|2 ds dt < ∞ (18) on the other hand, 47 / 125
Kf L2([a,b]) = b a (Kf)(t)(Kf)(t) dt = b a b a k(t, s)f(s) ds b a k(t, s)f(s) ds dt = b a b a k(t, s)f(s) ds 2 dt ≤ b a b a |k(t, s)f(s)| ds 2 dt ≤ b a b a |k(t, s)|2 ds b a |f(s)|2 ds dt (D. C-S) 48 / 125
a b a |k(t, s)|2 ds dt = f 2 L2([a,b]) b a b a |k(t, s)|2 ds dt = f 2 L2([a,b]) k 2 L2([a,b]×[a,b]) then Kf 2 L2([a,b]) ≤ f 2 L2([a,b]) k 2 L2([a,b]×[a,b]) (19) using the previous inequality (19), by eq. (18) and due to f in L2([a, b]) we conclude 49 / 125
L2([a,b]) k 2 L2([a,b]×[a,b]) < ∞ (20) therefore, the functions Kf is in L2([a, b]) and we can conclude that the integral operator K is well defined. 3. Let α, β in R an f, g in L2([a, b]) then K(αf + βg) = b a [k(t, s)(αf(s) + βg(s))]ds = α b a k(t, s)f(s)ds + β b a k(t, s)g(s)ds = αK(f) + βK(g) therefore the integral operator K is a linear operator. 50 / 125
Kf 2 L2([a,b]) ≤ f 2 L2([a,b]) b a b a |k(t, s)|2 ds dt so that f L2([a,b]) = 0, then Kf 2 L2([a,b]) f 2 L2([a,b]) ≤ b a b a |k(t, s)|2 ds dt then Kf L2([a,b]) f L2([a,b]) ≤ b a b a |k(t, s)|2 ds dt 1 2 51 / 125
Kf L2([a,b]) f L2([a,b]) ≤ b a b a |k(t, s)|2 ds dt 1 2 = k L2([a,b]×[a,b]) < ∞ in the last inequality using the equation (18) we can conclude that K < ∞ so K is a bounded operator. 52 / 125
continuous measurable Lebesgue complex function in [a, b] × [a, b] then the integral operator associated to k is in L(L2([a, b]), L2([a, b])). Proof. As k is a continuous function then |k(t, s)| is a continuous function. Moreover, every continuous function in a compact set [a, b] × [a, b] is bounded then k en L2([a, b] × [a, b]). 53 / 125
, . . . an orthonormal basis for L2([a, b]), the function defined as Φij (s, t) = ϕi (s)ϕj (t), for all i, j in N is an orthonormal basis for L2([a, b] × [a, b]). Proof. We affirm that the set B = { Φij | ∀i, j ∈ N } is orthonormal, in fact Φjk , Φmn L2([a,b]×[a,b]) = b a b a ϕj (s)ϕk (t)ϕm (s)ϕn (t) ds dt = b a b a ϕj (s)ϕk (t)ϕm (s) ϕn (t) ds dt 54 / 125
a b a ϕj (s)ϕk (t)ϕm (s)ϕn (t) ds dt = b a b a ϕj (s)ϕk (t)ϕm (s) ϕn (t) ds dt = b a ϕj (s)ϕm (s) ds b a ϕk (t)ϕn (t) dt (T. Fubini) = δjm δkn where δjm δkn = 1, if j = m ∧ k = n 0, in other case (21) therefore B is an orthonormal set. 55 / 125
basis. To show that B is a basis we have to proof if g is in L2 ([a, b] × [a, b]) and g, Φjk L2([a,b]×[a,b]) = 0, this implies that g ≡ 0 almost everywhere this is because theorem ?? (2) then we can conclude that B is an orthonormal basis for L2([a, b] × [a, b]). Indeed, Let g in L2([a, b] × [a, b]), then 0 = g, Φjk L2([a,b]×[a,b]) = b a b a g(s, t)ϕj (s) ϕk (t) ds dt = b a ϕj (s) b a g(s, t)ϕk (t) dt h ds = b a ϕj (s) h ds = b a h ϕj (s) ds = h, ϕj L2([a,b]) 56 / 125
(22) where the function h is h(s) = b a g(s, t)ϕk (t) dt the function h can be written in the following form h(s) = g(s, .), ϕk L2([a,b]) , ∀k = 1, 2, . . . (23) as the function h is orthonormal to every function ϕj this implies that h ≡ 0 in almost every point s in [a, b] (theorem ?? (2)). By the equation (23) and h ≡ 0 we can conclude that there is a set Ω which measure is zero such that for all s which is not in Ω the function g(s, .) is orthogonal to ϕk for all k = 1, 2, . . . therefore g(s, t) = 0 for all t and each s which doesn’t belongs to Ω (theorem ?? (2)). Therefore 57 / 125
dt ds = 0 so we conclude g ≡ 0 almost in everywhere point (t, s) in [a, b] × [a, b]. This proof that the set B is an orthonormal basis for L2([a, b]×[a, b]). 58 / 125
defined in L2([a, b] × [a, b]) and let K the integral operator associated to the function k defined as K : L2 ([a, b]) → L2 ([a, b]) f → (Kf)(t) = b a k(t, s)f(s) ds then the adjoint opeator K∗ of the integral operator K is given by (K∗g)(t) = b a k(s, t)g(s) ds for all g in L2([a, b]). 59 / 125
a (Kf(t)) g(t) dt = b a b a k(t, s)f(s) ds g(t) dt = b a b a k(t, s)f(s)g(t) ds dt = b a b a k(t, s)f(s)g(t) dt ds (T. Fubini) = b a f(s) b a k(t, s)g(t) dt ds = b a f(s) b a k(t, s)g(t) dt ds = f, K∗g L2([a,b]) 60 / 125
in L2([a, b] × [a, b]) and let K the integral operator associated to k defined as K : L2 ([a, b] × [a, b]) → L2 ([a, b]) f → (Kf)(t) = b a k(t, s)f(s) ds then the integral operator K is a compact operator. Skip Proof 62 / 125
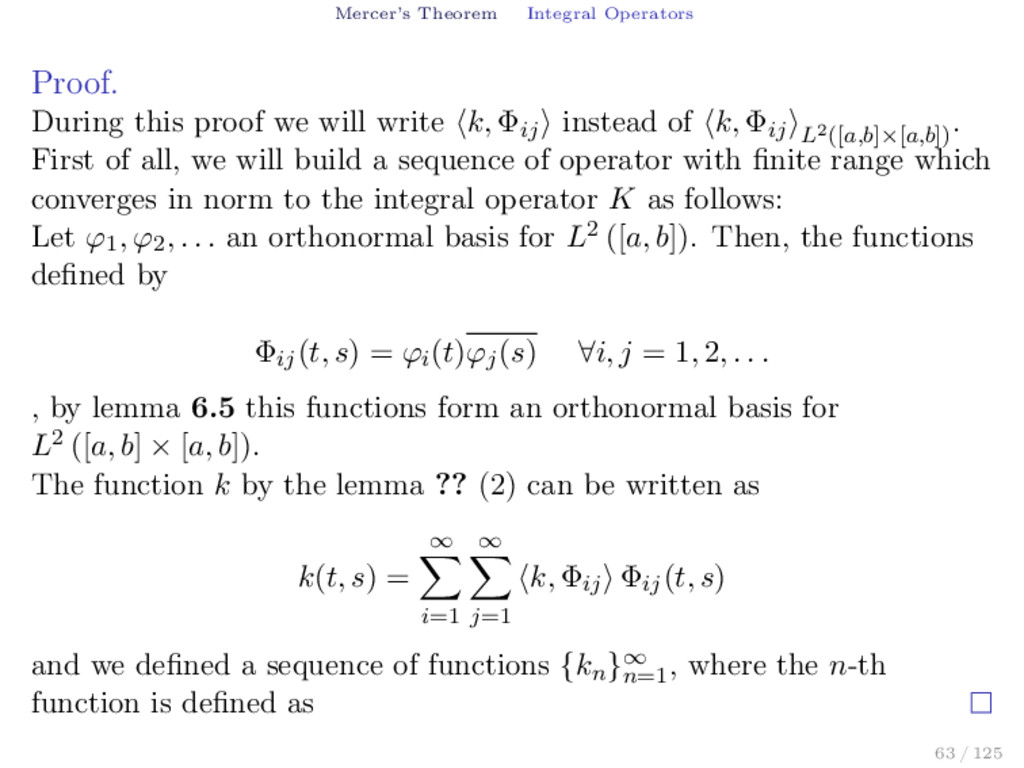
write k, Φij instead of k, Φij L2([a,b]×[a,b]) . First of all, we will build a sequence of operator with finite range which converges in norm to the integral operator K as follows: Let ϕ1 , ϕ2 , . . . an orthonormal basis for L2 ([a, b]). Then, the functions defined by Φij (t, s) = ϕi (t)ϕj (s) ∀i, j = 1, 2, . . . , by lemma 6.5 this functions form an orthonormal basis for L2 ([a, b] × [a, b]). The function k by the lemma ?? (2) can be written as k(t, s) = ∞ i=1 ∞ j=1 k, Φij Φij (t, s) and we defined a sequence of functions {kn }∞ n=1 , where the n-th function is defined as 63 / 125
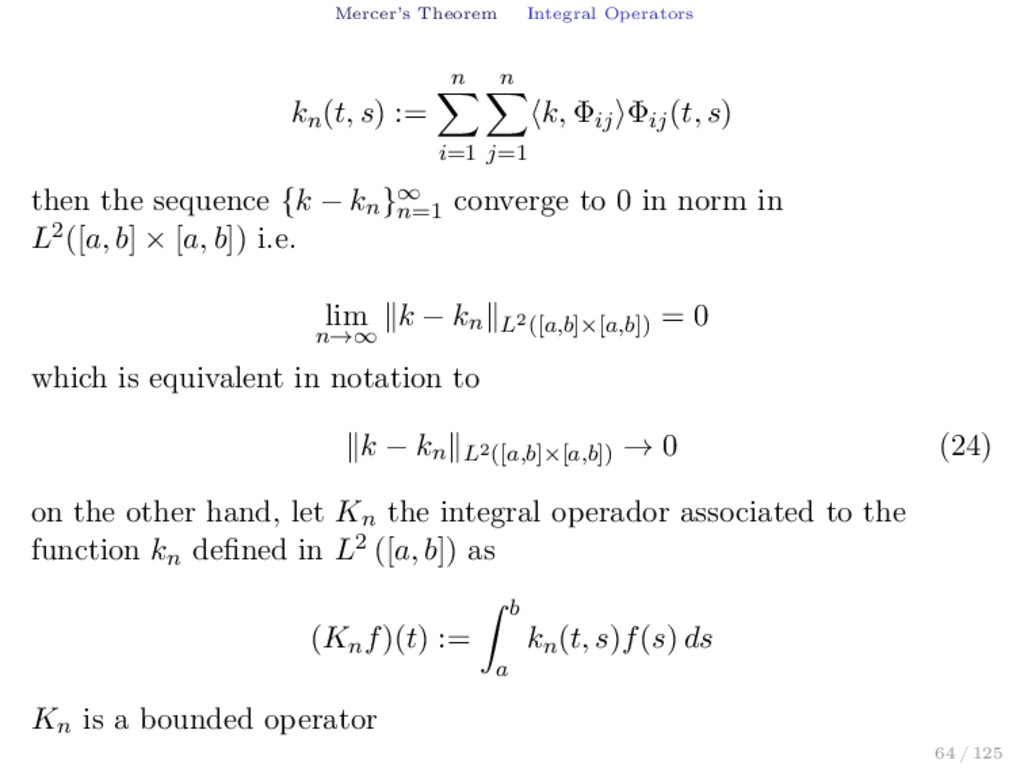
n j=1 k, Φij Φij (t, s) then the sequence {k − kn }∞ n=1 converge to 0 in norm in L2([a, b] × [a, b]) i.e. lim n→∞ k − kn L2([a,b]×[a,b]) = 0 which is equivalent in notation to k − kn L2([a,b]×[a,b]) → 0 (24) on the other hand, let Kn the integral operador associated to the function kn defined in L2 ([a, b]) as (Kn f)(t) := b a kn (t, s)f(s) ds Kn is a bounded operator 64 / 125
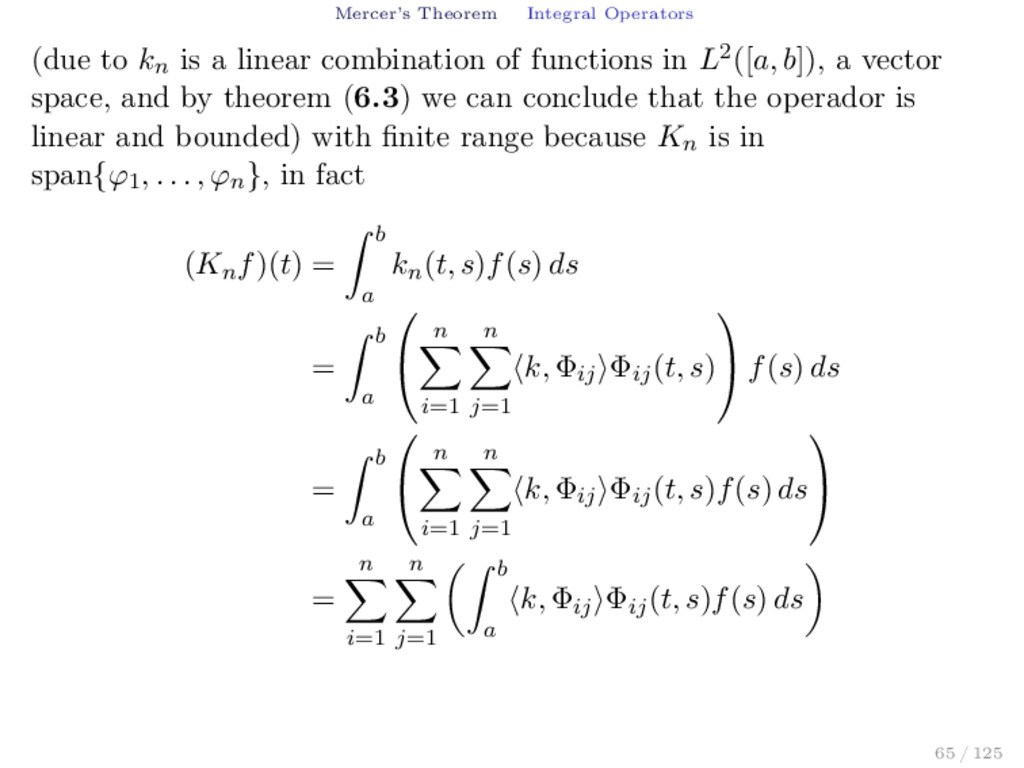
combination of functions in L2([a, b]), a vector space, and by theorem (6.3) we can conclude that the operador is linear and bounded) with finite range because Kn is in span{ϕ1 , . . . , ϕn }, in fact (Kn f)(t) = b a kn (t, s)f(s) ds = b a n i=1 n j=1 k, Φij Φij (t, s) f(s) ds = b a n i=1 n j=1 k, Φij Φij (t, s)f(s) ds = n i=1 n j=1 b a k, Φij Φij (t, s)f(s) ds 65 / 125
a k, Φij ϕi (t)ϕj (s)f(s) ds = n i=1 n j=1 ϕi (t) b a k, Φij ϕj (s)f(s) ds = n i=1 ϕi (t) n j=1 b a k, Φij ϕj (s)f(s) ds = n i=1 ϕi (t) b a n j=1 k, Φij ϕj (s)f(s) ds 66 / 125
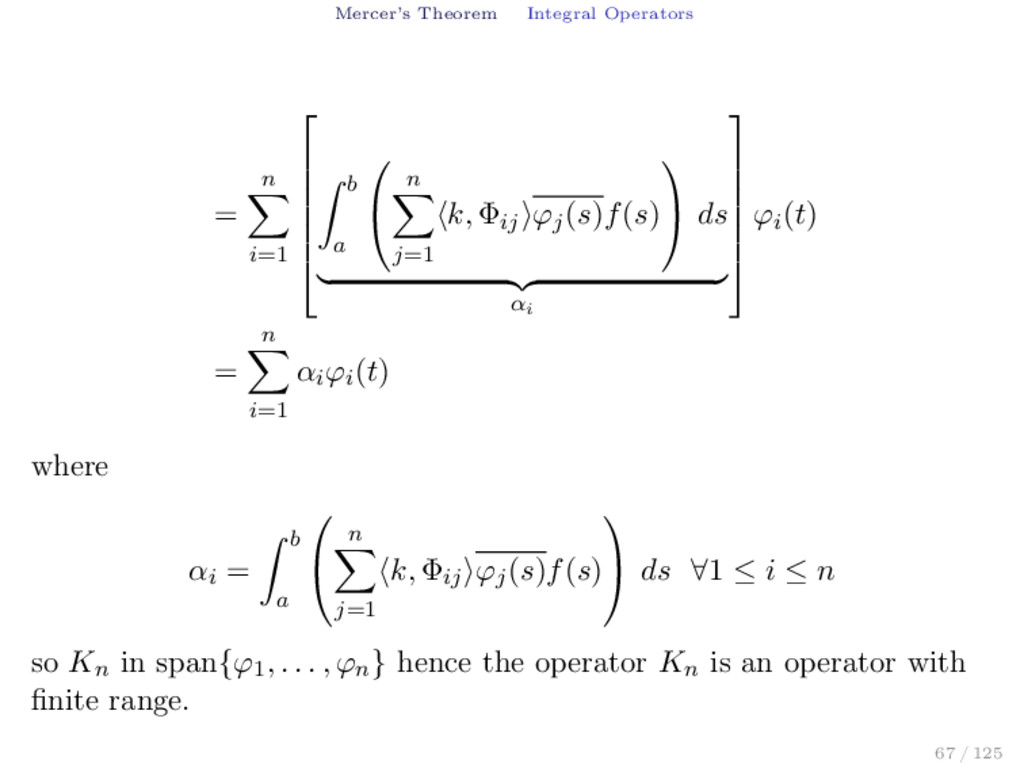
b a n j=1 k, Φij ϕj (s)f(s) ds αi ϕi (t) = n i=1 αi ϕi (t) where αi = b a n j=1 k, Φij ϕj (s)f(s) ds ∀1 ≤ i ≤ n so Kn in span{ϕ1 , . . . , ϕn } hence the operator Kn is an operator with finite range. 67 / 125
operador K is linear and bounded then K ≤ b a b a |k(t, s)|2 ds dt 1 2 = k L2([a,b]×[a,b]) (25) By the equation (25) applied to the operator K − Kn we have K − Kn ≤ k − kn L2([a,b]×[a,b]) and by the equation (24) we have K − Kn ≤ k − kn L2([a,b]×[a,b]) → 0 so we can conclude that K − Kn → 0 and applying the theorem ?? (puesto Kn es un operador de rango finito) to the last equation we can conclude that the operator K is a compact operator. 68 / 125
a continuous complex function defined in [a, b] × [a, b] which holds b a b a k(t, s)f(s)f(t) ds dt ≥ 0 (26) for all f in L2([a, b]) then the following statements are hold 1. The integral operator associated to k is a positive operator. 2. The integral operator associated to k is an auto-adjoint operator. 3. The number k(t, t) is real for all t in [a, b]. 4. The number k(t, t) holds k(t, t) ≥ 0, for all t in [a, b]. 69 / 125
is a continuous complex function in [a, b] × [a, b] then the function h defined as follows h(t) = b a k(t, s)ϕ(s) ds (27) is continuous in [a, b] for all ϕ in L2([a, b]). 70 / 125
}∞ n=1 a sequence of continous real functions in [a, b] such that satisfies the next conditions: 1. f1 (t) ≤ f2 (t) ≤ f3 (t) ≤ ... for all t in [a, b] ({fn }∞ n=1 is a monotonous increasing sequence of functions). 2. f(t) = lim n→∞ fn (t) is a continous function in [a, b]. and we define the set Fn as Fn := { t | f(t) − fn (t) ≥ } , ∀n ∈ N then 1. Fn+1 ⊂ Fn for all n in N. 2. The set Fn is closed. 3. ∞ n=1 Fn = ∅ . 71 / 125
Let {fn }∞ n=1 a sequence of continous real functions in [a, b] such that satisfies the next conditions: 1. f1 (t) ≤ f2 (t) ≤ f3 (t) ≤ ... for all t ∈ [a, b] ({fn }∞ n=1 is a monotonous increasing sequence of functions). 2. f(t) = lim n→∞ fn (t) es continua en [a, b]. Then the sequence of functions {fn }∞ n=1 converges uniformently to the function f in [a, b]. 72 / 125
k a continous function in [a, b] × [a, b] such that b a b a k(t, s)f(s)f(t) ds dt ≥ 0 (28) for all f in L2([a, b]), then, for all t and s in [a, b] the series k(t, s) = ∞ j=1 λj ϕj (t)ϕj (s) converges absolutely and uniformly in the set [a, b] × [a, b]. Skip Proof 73 / 125
set of functions λm ϕm (t), λm ϕm (t), . . . , λn ϕn (t) and λm ϕm (s), λm ϕm (s), . . . , λn ϕn (s) we have n j=m |λj ϕj (t)ϕj (s)| ≤ n j=m λj |ϕj (t)|2 1 2 n j=m λj |ϕj (s)|2 1 2 (29) Fixing t = t0 and by lemma ?? (5) applied to the series n j=m λj |ϕj (t0 )|2 given 2 > 0 implies the existence of an integer N such that for all n, m n > m ≥ N satifies 74 / 125
(s)| ≤ n j=m λj |ϕj (t0 )|2 1 2 < n j=m λj |ϕj (s)|2 1 2 ≤C < C , ∀s ∈ [a, b] where C2 = max t∈[a,b] k(t, t) and by Cauchy’s criteria for uniform series we conclude that ∞ j=1 λj ϕj (t)ϕj (s) converges absolutely and uniformently in s for each t (t0 was arbitrary). The next step is to prove that the series ∞ j=1 λj ϕj (t)ϕj (s) converges to k(t, s). Indeed, let ˜ k(t, s) the function defined by ˜ k(t, s) := ∞ j=1 λj ϕj (t)ϕj (s) 75 / 125
in L2 ([a, b]) and t = t0 fixed, the uniform convergence of the series in s and the continuity of each function ϕj (because ϕj is a continous function) implies that ˜ k(t0 , s) is continous as a function of s. Moreover, Let LHS = b a k(t0 , s) − ˜ k(t0 , s) f(s) ds then LHS = b a k(t0 , s)f(s) ds − b a ˜ k(t0 , s)f(s) ds = (Kf)(t0 ) − b a ∞ j=1 λj ϕj (t0 )ϕj (s) f(s) ds = (Kf)(t0 ) − b a ∞ j=1 λj ϕj (t0 )ϕj (s)f(s) ds = (Kf)(t0 ) − ∞ j=1 b a λj ϕj (t0 )ϕj (s)f(s) ds 76 / 125
k(t0 , s) almost everywhere for s in [a, b]. As ˜ k(t0 , s) and k(t0 , s) are continous then ˜ k(t0 , s) = k(t0 , s) for all s in [a, b] therefore ˜ k(t0 , .) = k(t0 , .) and as t0 was arbitrary then ˜ k ≡ k so that k(t, s) = ˜ k(t, s) = ∞ j=1 λj ϕj (t)ϕj (s) In particular, k(t, t) = ∞ j=1 λj |ϕj (t)|2 for all t in [a, b] and applying Dini’s Theorem 6.11 to the functions fn (t) = n j=1 λj |ϕj (t)|2 78 / 125
of increasing monotone functions and {fn }∞ n=1 converges to the continous function k(t, t) pointwise) we can conclude that the sequence of functions {fn }∞ n=1 converge uniformently in [a, b]. By definition of uniformently series there is a 2 > 0 which doesn’t depends on t, there is an integer N such that for all n, m ≥ N we have n j=m λj |ϕj (t)|2 < 2 , ∀t ∈ [a, b] utilizing the relationship (29) and the lemma ?? (3) implies that 79 / 125
≤ n j=m λj |ϕj (t)|2 1 2 < n j=m λj |ϕj (s)|2 1 2 ≤C < C ,∀(t, s) ∈ [a, b] × [a, b] where C2 = max s∈[a,b] k(s, s). Using Cauchy’s criteria for series to the series ∞ j=1 λj ϕj (t)ϕj (s) we conclude that this series converges absolutely and uniformently in [a, b] × [a, b]. 80 / 125
[17] Israel Gohberg, Seymour Goldberg, and Marinus A. Kaashoek. Basic Classes of Linear Operators. Birkhäuser, 2003. [22] Harry Hochstadt. Integral Equations. Wiley, 1989. Minor Sources: [13] Nelson Dunford and Jacob T. Schwartz. Linear Opertors Part II: Spectral Theory Self Adjoint Operators in Hilbert Space. Interscience Publishers, 1963. [30] James Mercer. “Functions of positive and negative type and their connection with the theory of integral equations”. In: Philosophical Transactions of the Royal Society (1909), pp. 415–446. [55] Stephen M. Zemyan. The Classical Theory of Integral Equations: A Concise Treatment. Birkhauser, 2010. 81 / 125
(Reproducing Kernel) A function k defined by k: E × E → C (s, t) → k(s, t) is a Reproducing Kernel of a Hilbert Space H if and only if 1. For all t in E, k(., t) is an element of H. 2. For all t in E and for all ϕ in H, ϕ, k(., t) H = ϕ(t) (30) The condition (30) is called Reproducing Property because the value of the function ϕ in the point t is reproduced by the inner product of ϕ with k(., t). 83 / 125
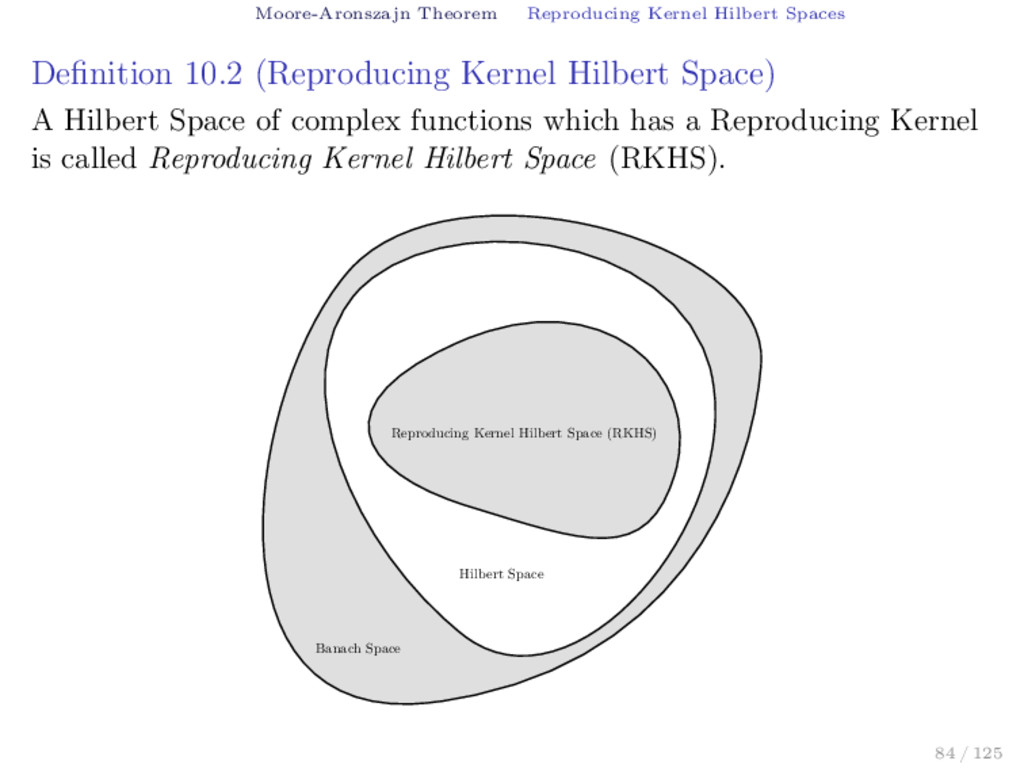
Hilbert Space) A Hilbert Space of complex functions which has a Reproducing Kernel is called Reproducing Kernel Hilbert Space (RKHS). Hilbert Space Banach Space Reproducing Kernel Hilbert Space (RKHS) 84 / 125
t and s in E the following property is hold k(s, t) = k(., t), k(., s) H Proof. Let g a function defined by g(.) = k(., t). Due to k(., t) is a reproducing kernel of H this implies that g(.) is an element of the Hilbert Space H. Moreover, due to the reproducing property we have g(s) = k(s, t) = g, k(., s) H = k(., t), k(., s) H this shows that k(s, t) = k(., t), k(., s) . 85 / 125
Hilbert Spaces A Finite Dimensional Example Theorem 10.4 Let β = {e1 , e2 , . . . , en } an orthonormal basis of H and let define the function k as follows k: E × E → C (s, t) → k(s, t) = n i=1 ei (s)ei (t) then k is a reproducing kernel. 86 / 125
in E, we have k(., t) = n i=1 ei (t)ei (.) belongs to H (this is due to k(., t) is a linear combination of elements of the basis β). On the other hand, for all function ϕ of H we have ϕ(.) = n i=1 λi ei (.) then 87 / 125
H = n i=1 λi ei (.), n i=1 ei (t)ei (.) H = n i=1 λi ei (.), n i=1 ei (t)ei (.) H = n i=1 n j=1 λi ei (t) ei , ej H =1 = n i=1 λi ei (t) = ϕ(t), ∀t ∈ E 88 / 125
dimensional Hilbert Space H has a reproducing Kernel. Proof. Let β = {v1 , . . . , vn } a basis for the Hilbert Space H. Using the Gram-Schmidt process on the set β we can build an orthonormal basis ˆ β = { ˆ v1 , . . . , ˆ vn }. Using the previous theorem we on this new basis ˆ β conclude that k: E × E → C (s, t) → k(s, t) = n i=1 vi (s)vi (t) is a Reproducing Kernel for H. 89 / 125
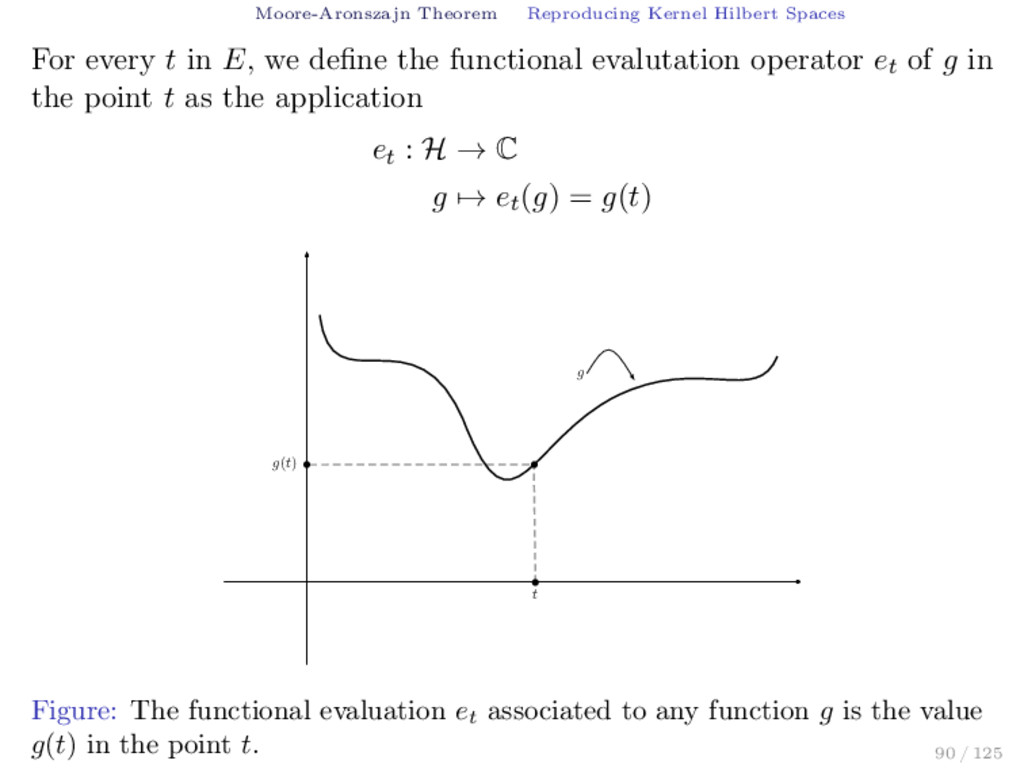
E, we define the functional evalutation operator et of g in the point t as the application et : H → C g → et (g) = g(t) g(t) t g Figure: The functional evaluation et associated to any function g is the value g(t) in the point t. 90 / 125
function) A function k : E × E → C is called semidefinite positive or positive type function if ∀n ≥ 1, ∀(a1 , . . . , an ) ∈ Cn, ∀(x1 , . . . , xn ) ∈ En, n i=1 n j=1 ai aj k(xi , xj ) ≥ 0 (31) 93 / 125
a Hilbert Space with inner product ., H (Not necesary an RKHS) and let ϕ : E → H, then, the function k defined as k : E × E → C (x, y) → k(x, y) = ϕ(x), ϕ(y) H is a semidefinite positive function. 94 / 125
a semdefinite positive function in E × E, then, 1. For all x in E L(x, x) ≥ 0 2. For all (x, y) in E × E holds L(x, y) = L(y, x) 3. The function L is semidefinite positive. 4. |L(x, y)|2 ≤ L(x, x)L(y, y). 96 / 125
function L defined on E × E is a semidefinite positive function if and only if 1. The L the function is symetric. 2. ∀n ≥ 1, ∀(a1 , a2 , . . . , an ) ∈ Rn, ∀(x1 , x2 , . . . , xn ) ∈ En, n i=1 n j=1 ai aj k(xi , xj ) ≥ 0 97 / 125
satifies the following properties. 1. Every the evaluation functionals et are continous in H0. 2. Toda sucesión de Cauchy {fn }∞ n=1 en H0 que converge puntualmente a 0 también converge en norma a 0 en H0. is called a pre-RKHS with reproducing kernel. 98 / 125
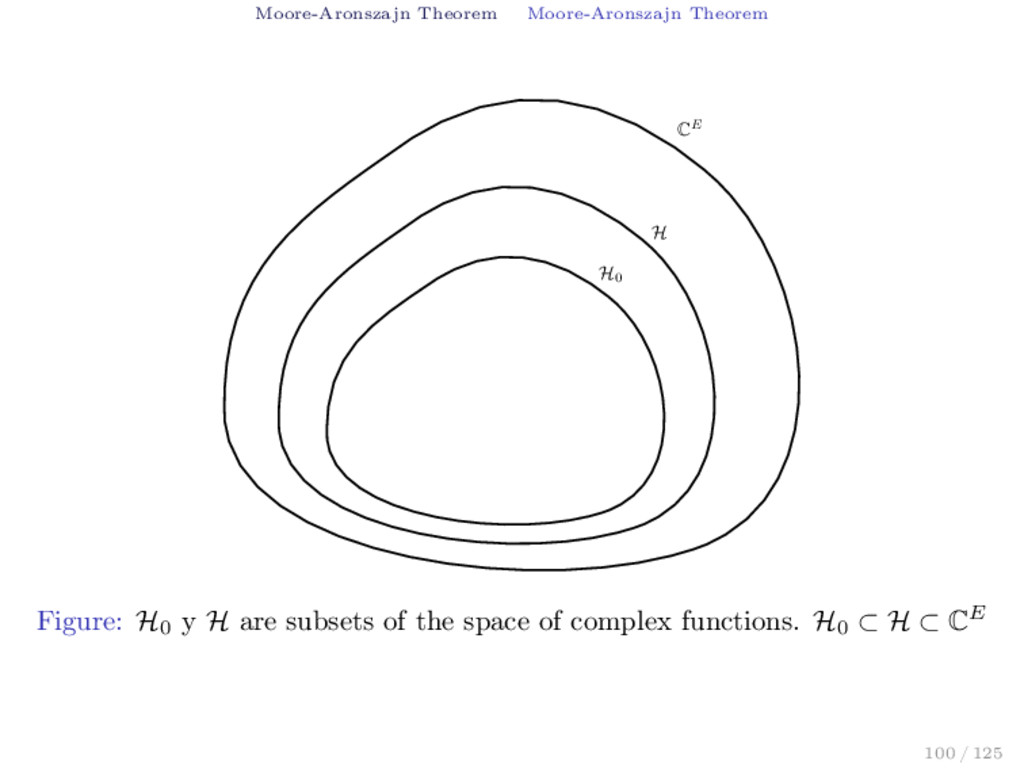
of CE, the space of complex functions in E, with inner product ., . H0 and associated norm . H0 then the hilbert space H with the following properties 1. H0 ⊂ H ⊂ CE and the topology induced by ., . H0 en H0 concide with the topology induced H0 by H. 2. H has a reproducing kernel k. exists if and only if 1. All the functional evaluatins et are continous in H0. 2. Every Cauchy sequence {fn }∞ n=1 in H0 which converge pointwise to 0 converge to 0 in norm. 99 / 125
a semidefinite positive function in E × E then exits a unique Hilbert Space H of functions in E with reproducing kernel k such that the subspace H0 of H defined as H0 = span{k(., t) | t ∈ E} is dense in H and H is a set of functions in E which is the limit of inner products of Cauchy sequences in H0. 101 / 125
[4] Alain Berlinet and Christine Thomas. Reproducing kernel Hilbert spaces in Probability and Statistics. Kluwer Academic Publishers, 2004. [42] D. Sejdinovic and A. Gretton. Foundations of Reproducing Kernel Hilbert Space I. url: http://www.stats.ox.ac.uk/~sejdinov/RKHS_Slides1.pdf (visited on 03/11/2012). [43] D. Sejdinovic and A. Gretton. Foundations of Reproducing Kernel Hilbert Space II. url: http://www.gatsby.ucl.ac.uk/ ~gretton/coursefiles/RKHS_Slides2.pdf (visited on 03/11/2012). [44] D. Sejdinovic and A. Gretton. What is an RKHS? url: http://www.gatsby.ucl.ac.uk/~gretton/coursefiles/RKHS_ Notes1.pdf (visited on 03/11/2012). 102 / 125
set. A function k : X × X → K is called kernel in X if and only if there is Hilbert Space H and a mapping Φ : X → H such that for all s, t it holds k(t, s) := Φ(t), Φ(s) H (32) The function Φ is called feature mapping and H feature space of k. 104 / 125
the function k defined by k(s, t) = st = s √ 2 s √ 2 , t √ 2 t √ 2 where the feature mappings are Φ(s) = s and ˜ Φ(s) = s √ 2 s √ 2 and the features spaces are H = R and ˜ H = R2 respectly. 105 / 125
based on Mercer’s Theorem The Mercer’s theorem allows to define a feature mapping for the kernel k as follows k(t, s) = ∞ j=1 λj ϕj (t)ϕj (s) = λj ϕj (t) ∞ j=1 , λj ϕj (s) ∞ j=1 2([a,b]) we can take 2([a, b]) as the feature space. 106 / 125
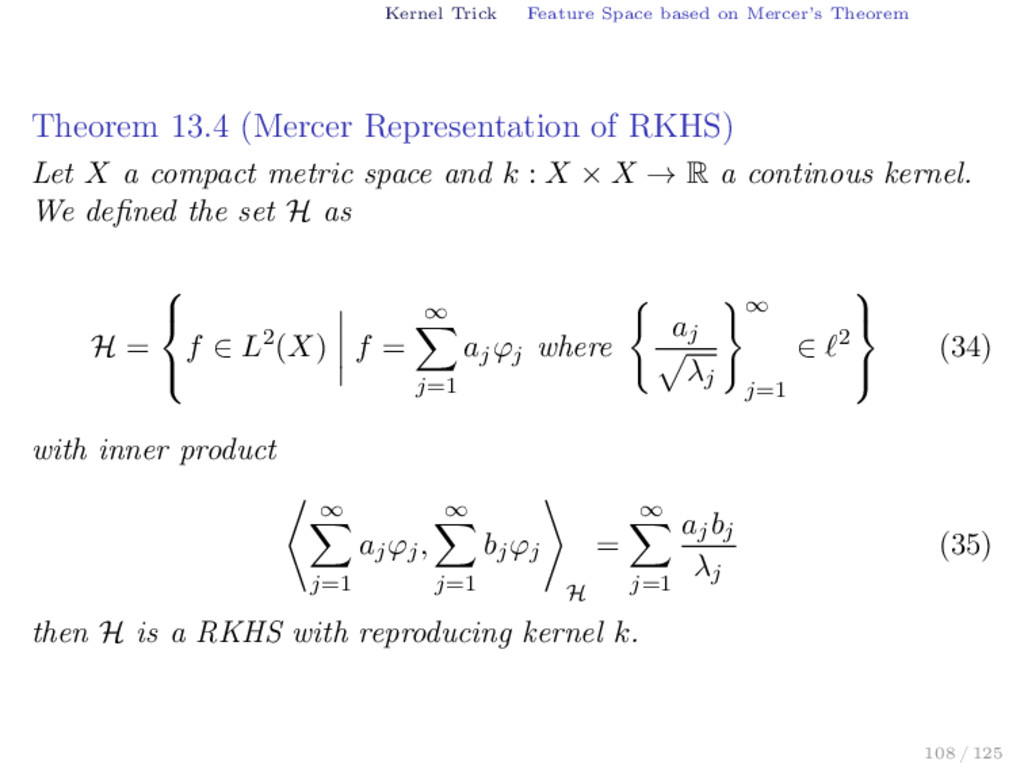
(Mercer Representation of RKHS) Let X a compact metric space and k : X × X → R a continous kernel. We defined the set H as H = f ∈ L2(X) f = ∞ j=1 aj ϕj where aj λj ∞ j=1 ∈ 2 (34) with inner product ∞ j=1 aj ϕj , ∞ j=1 bj ϕj H = ∞ j=1 aj bj λj (35) then H is a RKHS with reproducing kernel k. 108 / 125
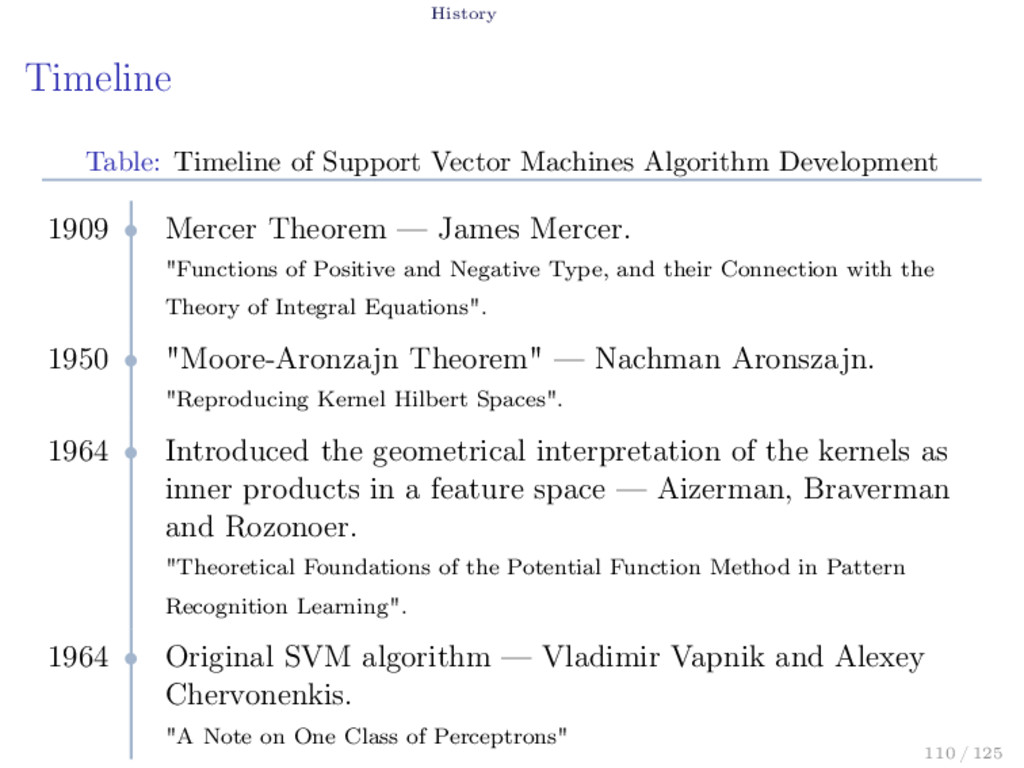
1909 • Mercer Theorem — James Mercer. "Functions of Positive and Negative Type, and their Connection with the Theory of Integral Equations". 1950 • "Moore-Aronzajn Theorem" — Nachman Aronszajn. "Reproducing Kernel Hilbert Spaces". 1964 • Introduced the geometrical interpretation of the kernels as inner products in a feature space — Aizerman, Braverman and Rozonoer. "Theoretical Foundations of the Potential Function Method in Pattern Recognition Learning". 1964 • Original SVM algorithm — Vladimir Vapnik and Alexey Chervonenkis. "A Note on One Class of Perceptrons" 110 / 125
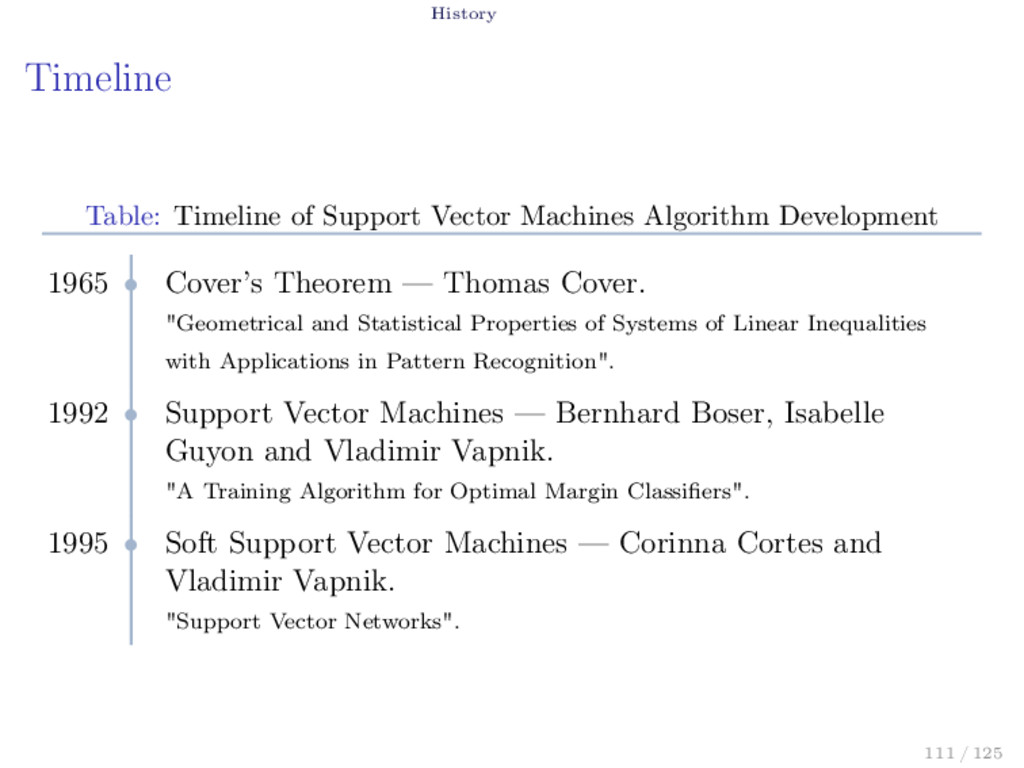
1965 • Cover’s Theorem — Thomas Cover. "Geometrical and Statistical Properties of Systems of Linear Inequalities with Applications in Pattern Recognition". 1992 • Support Vector Machines — Bernhard Boser, Isabelle Guyon and Vladimir Vapnik. "A Training Algorithm for Optimal Margin Classifiers". 1995 • Soft Support Vector Machines — Corinna Cortes and Vladimir Vapnik. "Support Vector Networks". 111 / 125
Hsuan-Tien Lin. Learning From Data: A short course. AML Book, 2012. [2] Nachman Aronszajn. “Theory of Reproducing Kernels”. In: Transactions of the American Mathematical Society 68 (1950), pp. 337–404. [3] C. Berg, J. Reus, and P. Ressel. Harmonic Analysis on Semigroups: Theory of Positive Definite and Related Functions. Springer Science+Business Media, LLV, 1984. [4] Alain Berlinet and Christine Thomas. Reproducing kernel Hilbert spaces in Probability and Statistics. Kluwer Academic Publishers, 2004. [5] Donald L. Cohn. Measure Theory. Birkhäuser, 2013. 113 / 125
Vector Networks”. In: Machine Learning (1995), pp. 273–297. [7] Thomas Cover. “Geometrical and Statistical properties of systems of linear inequalities with applications in pattern recognition”. In: IEEE Transactions on Electronic Computer (), pp. 326–334. [8] Nello Cristianini and John Shawe-Taylor. An Introduction to Support Vector Machines and Other Kernel-based Learning Methods. Cambridge University Press, 2000. [9] Felipe Cucker and Ding Xuan Zhou. Learning Theory. Cambridge University Press, 2007. [10] Steve Cucker Felipe; Smale. “On the Mathematical Foundations of Learning”. In: Bulletin of the American Mathematical Society (), pp. 1–49. 114 / 125
Zhang. Support Vector Machines: Optimization Based Theory, Algorithms, and Extensions. CRC Press, 2013. [12] Ke-Lin Du and M. N. S. Swamy. Neural Networks and Statistical Learning. Springer Science & Business Media, 2013. [13] Nelson Dunford and Jacob T. Schwartz. Linear Opertors Part II: Spectral Theory Self Adjoint Operators in Hilbert Space. Interscience Publishers, 1963. [14] Lawrence C. Evans. Partial Differential Equations. American Mathematical Society, 1998. [15] Gregory Fasshauer. Positive Definite Kernels: Past, Present and Future. url: http://www.math.iit.edu/~fass/PDKernels.pdf. 115 / 125
Past, Present and Future. url: http://www.math.iit.edu/~fass/PDKernels.pdf. [17] Israel Gohberg, Seymour Goldberg, and Marinus A. Kaashoek. Basic Classes of Linear Operators. Birkhäuser, 2003. [18] Lutz Hamel. Knowledge Discovery with Support Vector Machines. Wiley-Interscience, 2009. [19] Simon Haykin. Neural Networks and Learning Machines. Third Edition. Pearson Prentice Hall, 2009. [20] Operadores integrais positivos e espaços de Hilbert de reprodução. “José Claudinei Ferreira”. PhD thesis. USP - São Carlos, 2010. 116 / 125
der linaren Integralrechnungen.” In: Nachrichten, Math.-Phys. Kl (1904), pp. 49–91. url: http: //www.digizeitschriften.de/dms/img/?PPN=GDZPPN002499967. [22] Harry Hochstadt. Integral Equations. Wiley, 1989. [23] Alexey Izmailov and Mikhail Solodov. Otimização Vol.1 Condições de Otimalidade, Elementos de Analise Convexa e de Dualidade. Third Edition. IMPA, 2014. [24] Thorsten Joachims. Learning to Classify Text Using Support Vector Machines: Methods, Theory and Algorithms. Kluwer Academic Publishers, 2002. [25] J. Zico Kolter. MLSS 2014 – Introduction to Machine Learning. url: http://www.mlss2014.com/files/kolter_slides1.pdf. 117 / 125
Operators. Birkhäuser, 1986. [27] Elon Lages. Analisis Real, Volumen 1. Textos del IMCA, 1997. [28] Peter D. Lax. Functional Analysis. Wiley, 2002. [29] Le, Sarlos, and Smola. “Fastfood - Approximating Kernel Expansions in Loglinear Time”. In: ICML 2013 (). [30] James Mercer. “Functions of positive and negative type and their connection with the theory of integral equations”. In: Philosophical Transactions of the Royal Society (1909), pp. 415–446. [31] Mehryar Mohri, Afshin Rostamizadeh, and Ameet Talwalkar. Foundations of Machine Learning. The MIT Press, 2012. 118 / 125
Learning in Python”. In: Journal of Machine Learning Research 12 (2011), pp. 2825–2830. [33] Anthony L. Peressini, Francis E. Sullivan, and J.J. Jr. Uhl. The Mathematics of Nonlinear Programming. Springer, 1993. [34] David Porter and David S. G. Stirling. Integral Equations: A practical treatment, from spectral theory to applications. Cambridge University Press, 1990. [35] Carl Edward Rasmussen and Christopher K. I. Williams. Gaussian Processes for Machine Learning. The MIT Press, 2006. [36] Frigyes Riesz and Béla Sz.-Nagy. Functional Analysis. Dover Publications, Inc, 1990. [37] Walter Rudin. Principles of Mathematical Analysis. McGraw-Hill, Inc., 1964. 119 / 125
and its appplications. Longman Scientific & Technical, 1988. [39] Bernhard Schlköpf and Alexander Smola. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond. The MIT Press, 2001. [40] E. Schmidt. “Über die Auflösung linearer Gleichungen mit Unendlich vielen unbekannten”. In: Rendiconti del Circolo Matematico di Palermo (1908), pp. 53–77. url: http://link.springer.com/article/10.1007/BF03029116. [41] Bernhard Schölkopf. What is Machine Learning? Machine Learning Summer School 2013 Tübingen, 2013. 120 / 125
of Reproducing Kernel Hilbert Space I. url: http://www.stats.ox.ac.uk/~sejdinov/RKHS_Slides1.pdf (visited on 03/11/2012). [43] D. Sejdinovic and A. Gretton. Foundations of Reproducing Kernel Hilbert Space II. url: http://www.gatsby.ucl.ac.uk/ ~gretton/coursefiles/RKHS_Slides2.pdf (visited on 03/11/2012). [44] D. Sejdinovic and A. Gretton. What is an RKHS? url: http://www.gatsby.ucl.ac.uk/~gretton/coursefiles/RKHS_ Notes1.pdf (visited on 03/11/2012). [45] Alex Smola. 4.2.2 Kernels - Machine Learning Class 10-701. url: https://www.youtube.com/watch?v=0Nis-oMLbDs. 121 / 125
Introduction to Support Vector Machines in Biomedicine. World Scientific, 2011. [47] Ingo Steinwart and Christmannm Andreas. Support Vector Machines. 2008. [48] Yichuan Tang. Deep Learning using Linear Support Vector Machines. url: http://deeplearning.net/wp- content/uploads/2013/03/dlsvm.pdf. [49] Sergios Theodoridis. Machine Learning: A Bayesian and Optimization Perspective. Academic Press, 2015. [50] Joachims Thorsten. Learning to Classify Text Using Support Vector Machines. Springer, 2002. [51] Vladimir Vapnik. Estimation of Dependences Based on Empirical Data. Springer, 2006. 122 / 125
Data. SIAM, 1900. [53] Holger Wendland. Scattered Data Approximation. Cambridge University Press, 2005. [54] Eberhard Zeidler. Applied Functional Analysis: Main Principles and Their Applications. Springer, 1995. [55] Stephen M. Zemyan. The Classical Theory of Integral Equations: A Concise Treatment. Birkhauser, 2010. 123 / 125
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Mercer’s Theorem Integral Operators Proof. Kf 2 L2([a,b]) = Kf,](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_47.jpg){kind=link}
{kind=link}
![Mercer’s Theorem Integral Operators Kf 2 L2([a,b]) ≤ f 2](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_49.jpg){kind=link}
{kind=link}
![Mercer’s Theorem Integral Operators K = sup f L2([a,b]) =0](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_51.jpg){kind=link}
{kind=link}
{kind=link}
![Mercer’s Theorem Integral Operators Φjk , Φmn L2([a,b]×[a,b]) = b](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_54.jpg){kind=link}
{kind=link}
![Mercer’s Theorem Integral Operators then h, ϕj L2([a,b]) = 0](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_56.jpg){kind=link}
{kind=link}
{kind=link}
![Mercer’s Theorem Integral Operators Proof. Kf, g L2([a,b]) = b](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_59.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![References References I [1] Yaser S. Abu-Mostafa, Malik Magdon-Ismail, and](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_112.jpg){kind=link}
![References References II [6] Corinna Cortes and Vladimir Vapnik. “Support](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_113.jpg){kind=link}
![References References III [11] Naiyang Deng, Yingjie Tian, and Chunhua](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_114.jpg){kind=link}
![References References IV [16] Gregory E. Fasshauer. Positive Definite Kernels:](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_115.jpg){kind=link}
![References References V [21] David Hilbert. “Grundzüge einer allgeminen Theorie](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_116.jpg){kind=link}
![References References VI [26] Hermann König. Eigenvalue Distribution of Compact](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_117.jpg){kind=link}
![References References VII [32] F. Pedregosa et al. “Scikit-learn: Machine](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_118.jpg){kind=link}
![References References VIII [38] Saburou Saitoh. Theory of reproducing kernels](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_119.jpg){kind=link}
![References References IX [42] D. Sejdinovic and A. Gretton. Foundations](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_120.jpg){kind=link}
![References References X [46] Alexander Stantnikov et al. A Gentle](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_121.jpg){kind=link}
![References References XI [52] Grace Wahba. Spline Models for Observational](https://files.speakerdeck.com/presentations/60f8f96dc2f4403aa9b9d7a42cb396cf/slide_122.jpg){kind=link}
{kind=link}
{kind=link}