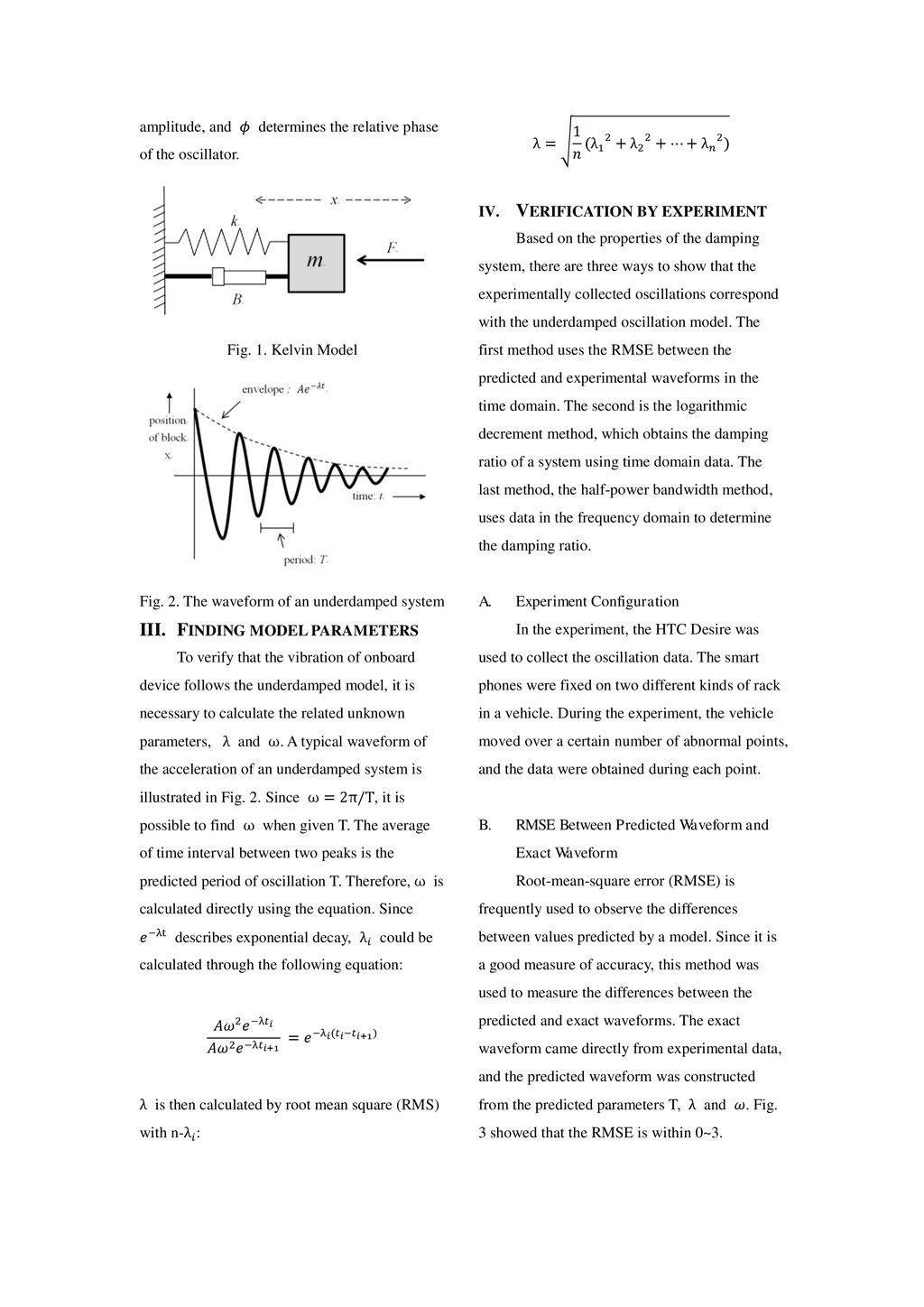
the setup position of the accelerometer on the vehicle or the sealing of the deployment threshold. The airbag deploys when the accelerometer senses that the vehicle is in a situation of large shocks, which is determined by the deployment threshold. One of the reasons that airbags don’t deploy during crashes is because of incorrect setting of the air bag deployment threshold, which is often due to inadequate testing. There are several applications that use accelerometers to do road abnormality detection. As mentioned earlier, the application system records abnormal positions as the accelerometer detects vibrations that exceed a specified abnormality threshold. The threshold is not suitable in every condition, due to different setup positions and vehicle types, but it will influence the vibration of a vehicle in any situation. For example, raw vibration data for movements over potholes is different for each type of vehicle, so the threshold changes as well. Therefore, it is necessary to find a mathematical model to describe vehicle vibrations in order to solve the discrepancies in the accelerometer data collected under different conditions. In this paper we describe a mathematical model, realized through experiments, and show that underdamped oscillation models the vibration of onboard devices. First, the oscillation data was collected on vehicles by setting up smartphones on different vehicles and racks. Next, these data were used to figure out the unknown parameters λ and ω of the underdamped model. After calculating these values, we then showed that the oscillation corresponds to the underdamped oscillation in three ways: the RMSE between predicted waveform and exact waveform in time domain, the logarithmic decrement method, and the half-power bandwidth method. II. UNDERDAMPED OSCILLATIONS This section introduces the basic model for damping oscillation. Fig. 1 illustrates the Kelvin model, in which a string with spring constant k and a damper with damping coefficient b are connected in parallel to a mass m. When the mass is given a force F to push the string and damper, the displacement of the mass is x. According to Newton’s second law, = − − = . As shown previously, a forced damped oscillator follows the equation ̈ + ̇ + = 0, with m > 0, ≥ 0 and k > 0. The characteristic equation is then m2 + + = 0, with characteristic roots −±√2−4 2 . When 2 < 4, the system is underdamped. If ω = √|2 − 4|/2 is the frequency of the damped oscillator, then the equation gives characteristic roots of − 2 ± ω. The general solution of the real part is x(t) = −/2 cos( + ). After taking two time derivatives, a simple solution of a(t) = 2−cos ( + ) is found for acceleration, where = −/2, A is the real initial
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}