Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[43]Low Sampling Rate IMU-based Pedestrian Traj...
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
MC2013
August 24, 2013
120
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[43]Low Sampling Rate IMU-based Pedestrian Trajectory System
MC2013
August 24, 2013
More Decks by MC2013
See All by MC2013
[09]眾源道路鋪面監控系統
mc2013
0
170
[24]車載網路中基於網路編碼技術之封包聚集機制
mc2013
0
170
[panel1]詹寶珠教授
mc2013
0
170
[panel1]王國禎教授
mc2013
0
170
[panel1]彭文志教授
mc2013
0
270
[panel2]陳彥光教授
mc2013
0
230
[panel2]陳贊鴻副總
mc2013
0
230
[panel2]王余煥處長
mc2013
0
180
[panel2]吳仁琪博士
mc2013
0
380
Featured
See All Featured
Connecting the Dots Between Site Speed, User Experience & Your Business [WebExpo 2025]
tammyeverts
11
940
The Director’s Chair: Orchestrating AI for Truly Effective Learning
tmiket
1
190
Docker and Python
trallard
47
3.9k
For a Future-Friendly Web
brad_frost
183
10k
How To Speak Unicorn (iThemes Webinar)
marktimemedia
1
480
Introduction to Domain-Driven Design and Collaborative software design
baasie
1
840
Designing Powerful Visuals for Engaging Learning
tmiket
1
410
Build your cross-platform service in a week with App Engine
jlugia
234
18k
Effective software design: The role of men in debugging patriarchy in IT @ Voxxed Days AMS
baasie
0
400
I Don’t Have Time: Getting Over the Fear to Launch Your Podcast
jcasabona
34
2.8k
Art, The Web, and Tiny UX
lynnandtonic
304
22k
Everyday Curiosity
cassininazir
0
230
Transcript
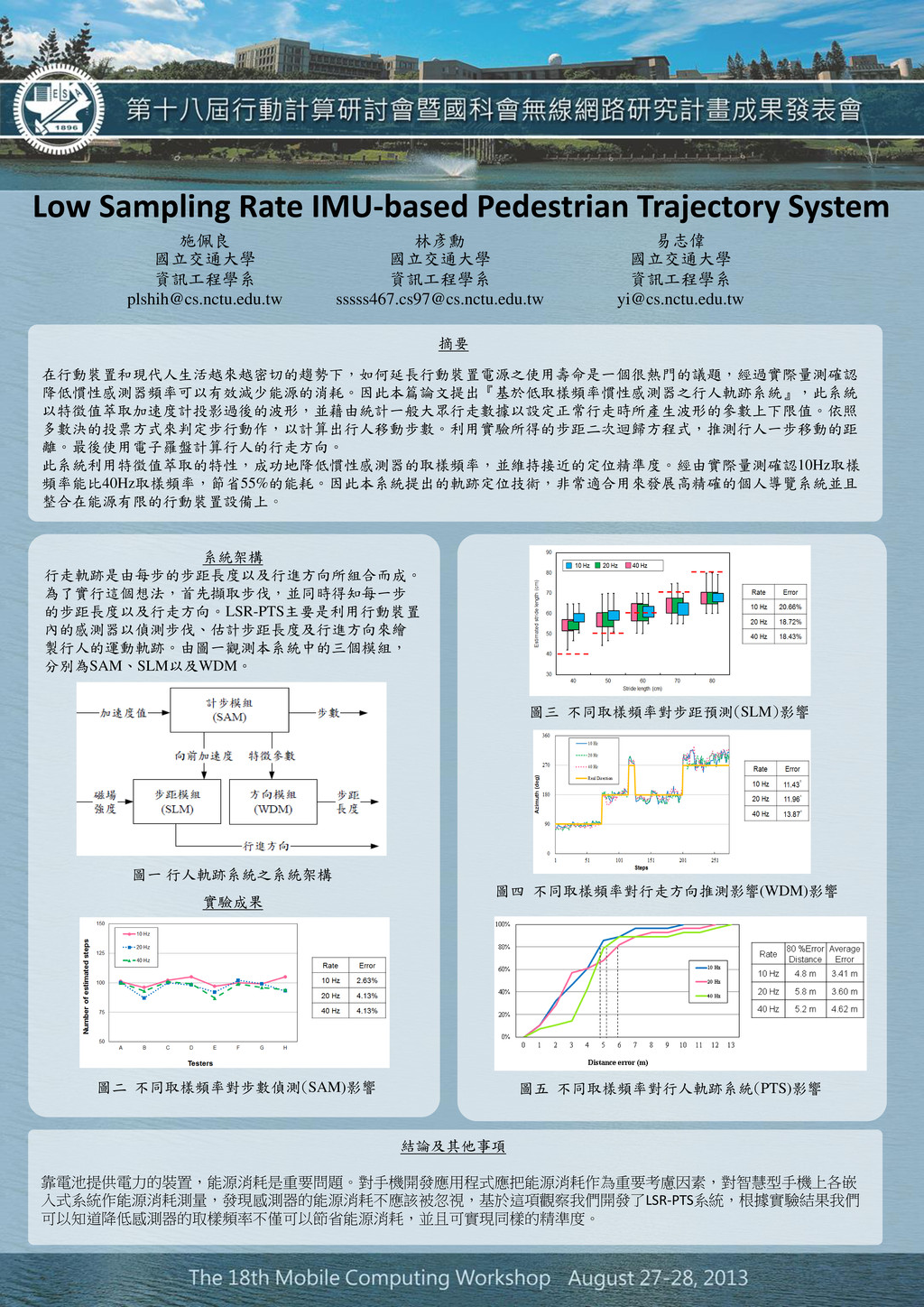
Low Sampling Rate IMU-based Pedestrian Trajectory System 系統架構 行走軌跡是由每步的步距長度以及行進方向所組合而成。 為了實行這個想法,首先擷取步伐,並同時得知每一步
的步距長度以及行走方向。LSR-PTS主要是利用行動裝置 內的感測器以偵測步伐、估計步距長度及行進方向來繪 製行人的運動軌跡。由圖一觀測本系統中的三個模組, 分別為SAM、SLM以及WDM。 實驗成果 結論及其他事項 靠電池提供電力的裝置,能源消耗是重要問題。對手機開發應用程式應把能源消耗作為重要考慮因素,對智慧型手機上各嵌 入式系統作能源消耗測量,發現感測器的能源消耗不應該被忽視,基於這項觀察我們開發了LSR-PTS系統,根據實驗結果我們 可以知道降低感測器的取樣頻率不僅可以節省能源消耗,並且可實現同樣的精準度。 摘要 在行動裝置和現代人生活越來越密切的趨勢下,如何延長行動裝置電源之使用壽命是一個很熱門的議題,經過實際量測確認 降低慣性感測器頻率可以有效減少能源的消耗。因此本篇論文提出『基於低取樣頻率慣性感測器之行人軌跡系統』,此系統 以特徵值萃取加速度計投影過後的波形,並藉由統計一般大眾行走數據以設定正常行走時所產生波形的參數上下限值。依照 多數決的投票方式來判定步行動作,以計算出行人移動步數。利用實驗所得的步距二次迴歸方程式,推測行人一步移動的距 離。最後使用電子羅盤計算行人的行走方向。 此系統利用特徵值萃取的特性,成功地降低慣性感測器的取樣頻率,並維持接近的定位精準度。經由實際量測確認10Hz取樣 頻率能比40Hz取樣頻率,節省55%的能耗。因此本系統提出的軌跡定位技術,非常適合用來發展高精確的個人導覽系統並且 整合在能源有限的行動裝置設備上。 林彥勳 國立交通大學 資訊工程學系
[email protected]
施佩良 國立交通大學 資訊工程學系
[email protected]
易志偉 國立交通大學 資訊工程學系
[email protected]
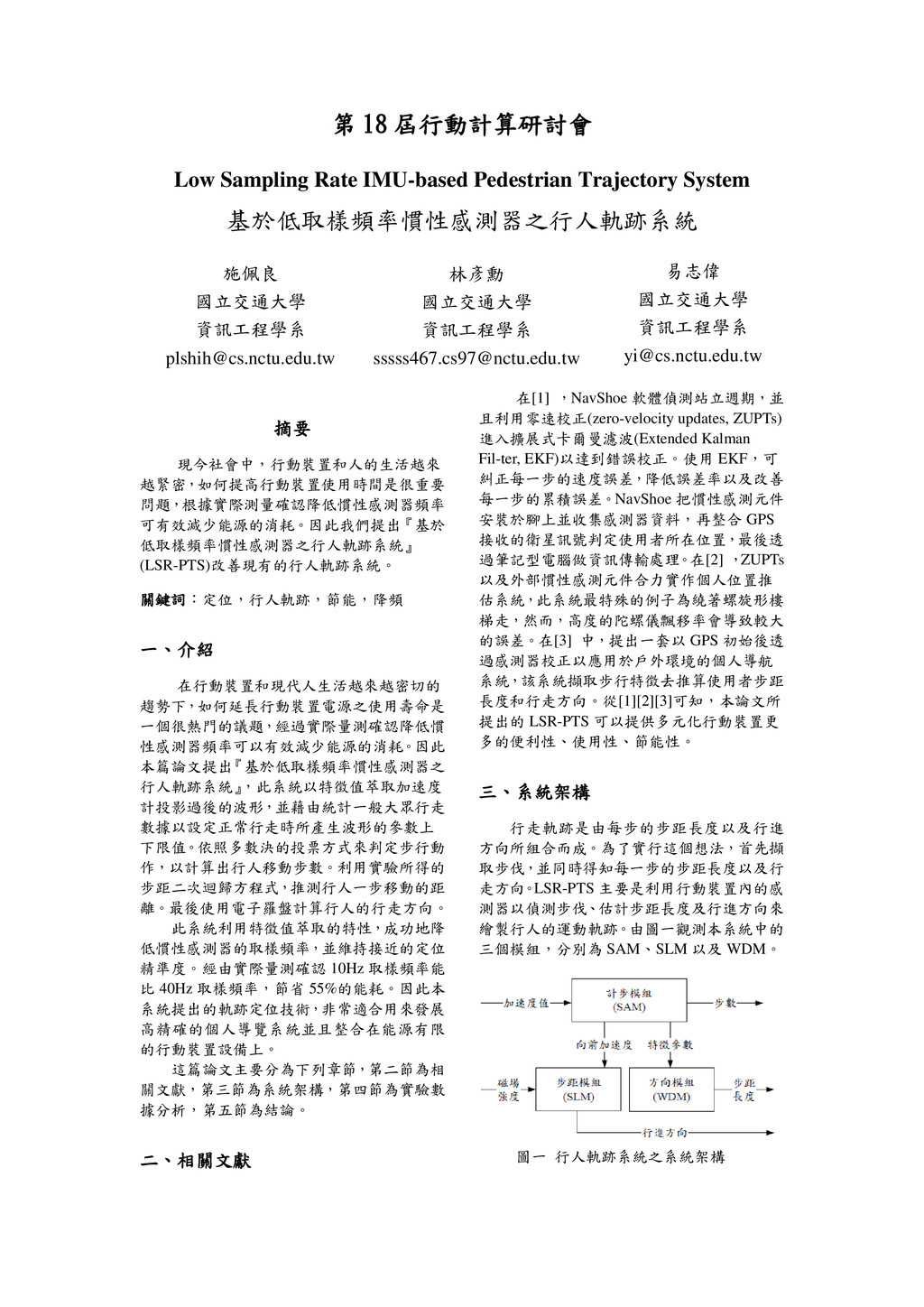
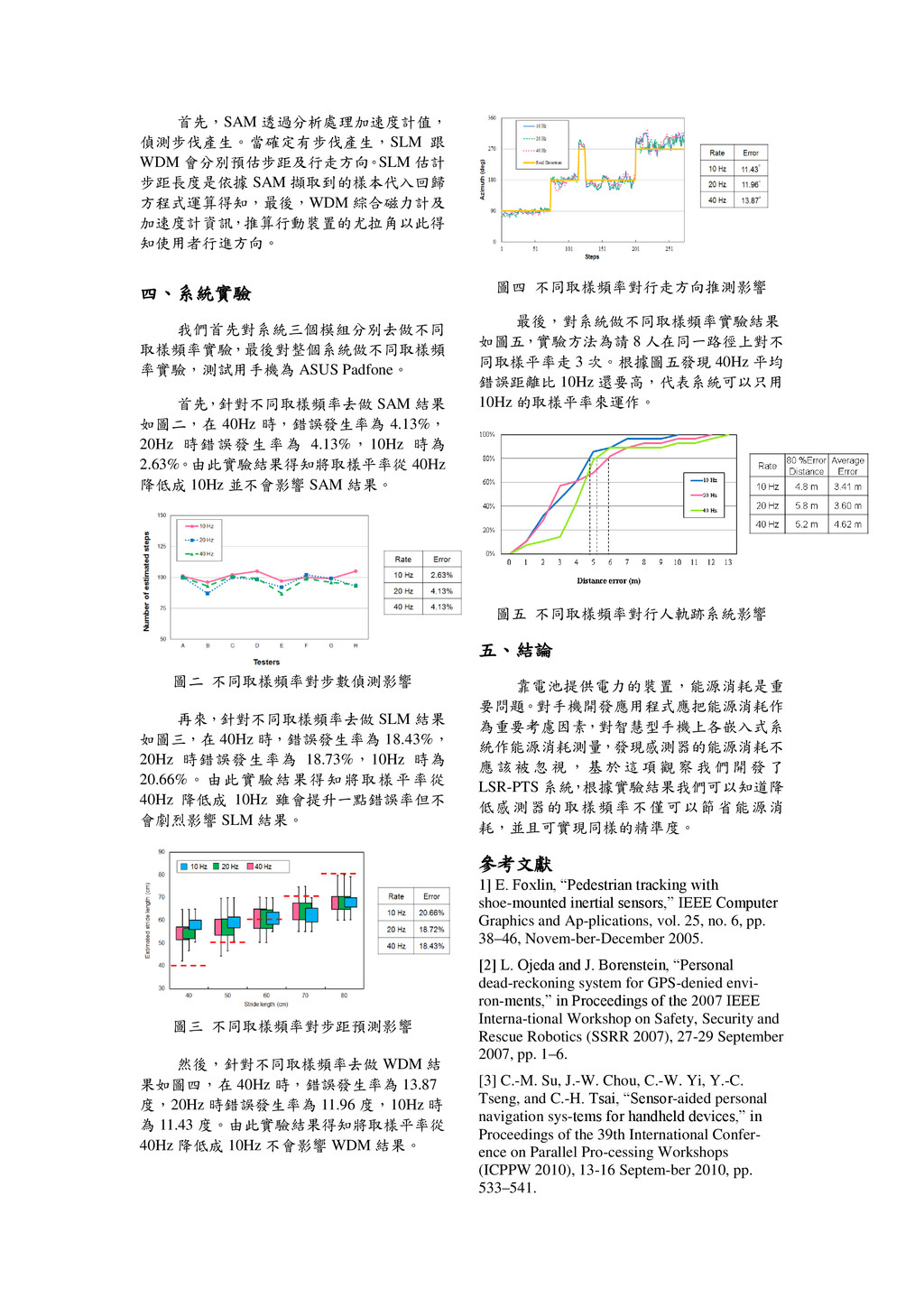
圖一 行人軌跡系統之系統架構 圖二 不同取樣頻率對步數偵測(SAM)影響 圖三 不同取樣頻率對步距預測(SLM)影響 圖四 不同取樣頻率對行走方向推測影響(WDM)影響 圖五 不同取樣頻率對行人軌跡系統(PTS)影響
第 18 屆行動計算研討會 Low Sampling Rate IMU-based Pedestrian Trajectory System
基於低取樣頻率慣性感測器之行人軌跡系統 摘要 現今社會中,行動裝置和人的生活越來 越緊密,如何提高行動裝置使用時間是很重要 問題,根據實際測量確認降低慣性感測器頻率 可有效減少能源的消耗。因此我們提出『基於 低取樣頻率慣性感測器之行人軌跡系統』 (LSR-PTS)改善現有的行人軌跡系統。 關鍵詞:定位,行人軌跡,節能,降頻 一、介紹 在行動裝置和現代人生活越來越密切的 趨勢下,如何延長行動裝置電源之使用壽命是 一個很熱門的議題,經過實際量測確認降低慣 性感測器頻率可以有效減少能源的消耗。因此 本篇論文提出 『基於低取樣頻率慣性感測器之 行人軌跡系統』 ,此系統以特徵值萃取加速度 計投影過後的波形,並藉由統計一般大眾行走 數據以設定正常行走時所產生波形的參數上 下限值。依照多數決的投票方式來判定步行動 作,以計算出行人移動步數。利用實驗所得的 步距二次迴歸方程式,推測行人一步移動的距 離。最後使用電子羅盤計算行人的行走方向。 此系統利用特徵值萃取的特性,成功地降 低慣性感測器的取樣頻率,並維持接近的定位 精準度。經由實際量測確認 10Hz 取樣頻率能 比 40Hz 取樣頻率,節省 55%的能耗。因此本 系統提出的軌跡定位技術,非常適合用來發展 高精確的個人導覽系統並且整合在能源有限 的行動裝置設備上。 這篇論文主要分為下列章節,第二節為相 關文獻,第三節為系統架構,第四節為實驗數 據分析,第五節為結論。 二、相關文獻 在[1] ,NavShoe 軟體偵測站立週期,並 且利用零速校正(zero-velocity updates, ZUPTs) 進入擴展式卡爾曼濾波(Extended Kalman Fil-ter, EKF)以達到錯誤校正。使用 EKF,可 糾正每一步的速度誤差,降低誤差率以及改善 每一步的累積誤差。NavShoe 把慣性感測元件 安裝於腳上並收集感測器資料,再整合 GPS 接收的衛星訊號判定使用者所在位置,最後透 過筆記型電腦做資訊傳輸處理。在[2] ,ZUPTs 以及外部慣性感測元件合力實作個人位置推 估系統,此系統最特殊的例子為繞著螺旋形樓 梯走,然而,高度的陀螺儀飄移率會導致較大 的誤差。在[3] 中,提出一套以 GPS 初始後透 過感測器校正以應用於戶外環境的個人導航 系統,該系統擷取步行特徵去推算使用者步距 長度和行走方向。從[1][2][3]可知,本論文所 提出的 LSR-PTS 可以提供多元化行動裝置更 多的便利性、使用性、節能性。 三、系統架構 行走軌跡是由每步的步距長度以及行進 方向所組合而成。為了實行這個想法,首先擷 取步伐,並同時得知每一步的步距長度以及行 走方向 。 LSR-PTS 主要是利用行動裝置內的感 測器以偵測步伐、估計步距長度及行進方向來 繪製行人的運動軌跡。由圖一觀測本系統中的 三個模組,分別為 SAM、SLM 以及 WDM。 圖一 行人軌跡系統之系統架構 施佩良 國立交通大學 資訊工程學系
[email protected]
林彥勳 國立交通大學 資訊工程學系
[email protected]
易志偉 國立交通大學 資訊工程學系
[email protected]
首先,SAM 透過分析處理加速度計值, 偵測步伐產生。當確定有步伐產生,SLM 跟 WDM 會分別預估步距及行走方向 。SLM 估計 步距長度是依據 SAM
擷取到的樣本代入回歸 方程式運算得知,最後,WDM 綜合磁力計及 加速度計資訊,推算行動裝置的尤拉角以此得 知使用者行進方向。 四、系統實驗 我們首先對系統三個模組分別去做不同 取樣頻率實驗,最後對整個系統做不同取樣頻 率實驗,測試用手機為 ASUS Padfone。 首先,針對不同取樣頻率去做 SAM 結果 如圖二,在 40Hz 時,錯誤發生率為 4.13%, 20Hz 時錯誤發生率為 4.13%,10Hz 時為 2.63%。由此實驗結果得知將取樣平率從 40Hz 降低成 10Hz 並不會影響 SAM 結果。 圖二 不同取樣頻率對步數偵測影響 再來,針對不同取樣頻率去做 SLM 結果 如圖三,在 40Hz 時,錯誤發生率為 18.43%, 20Hz 時錯誤發生率為 18.73%,10Hz 時為 20.66%。由此實驗結果得知將取樣平率從 40Hz 降低成 10Hz 雖會提升一點錯誤率但不 會劇烈影響 SLM 結果。 圖三 不同取樣頻率對步距預測影響 然後,針對不同取樣頻率去做 WDM 結 果如圖四,在 40Hz 時,錯誤發生率為 13.87 度,20Hz 時錯誤發生率為 11.96 度,10Hz 時 為 11.43 度。由此實驗結果得知將取樣平率從 40Hz 降低成 10Hz 不會影響 WDM 結果。 圖四 不同取樣頻率對行走方向推測影響 最後,對系統做不同取樣頻率實驗結果 如圖五,實驗方法為請 8 人在同一路徑上對不 同取樣平率走 3 次。根據圖五發現 40Hz 平均 錯誤距離比 10Hz 還要高,代表系統可以只用 10Hz 的取樣平率來運作。 圖五 不同取樣頻率對行人軌跡系統影響 五、結論 靠電池提供電力的裝置,能源消耗是重 要問題。對手機開發應用程式應把能源消耗作 為重要考慮因素,對智慧型手機上各嵌入式系 統作能源消耗測量,發現感測器的能源消耗不 應 該 被 忽 視 , 基 於 這 項 觀 察 我 們 開 發 了 LSR-PTS 系統 , 根據實驗結果我們可以知道降 低感測器的取樣頻率不僅可以節省能源消 耗,並且可實現同樣的精準度。 參考文獻 1] E. Foxlin, “Pedestrian tracking with shoe-mounted inertial sensors,” IEEE Computer Graphics and Ap-plications, vol. 25, no. 6, pp. 38–46, Novem-ber-December 2005. [2] L. Ojeda and J. Borenstein, “Personal dead-reckoning system for GPS-denied envi- ron-ments,” in Proceedings of the 2007 IEEE Interna-tional Workshop on Safety, Security and Rescue Robotics (SSRR 2007), 27-29 September 2007, pp. 1–6. [3] C.-M. Su, J.-W. Chou, C.-W. Yi, Y.-C. Tseng, and C.-H. Tsai, “Sensor-aided personal navigation sys-tems for handheld devices,” in Proceedings of the 39th International Confer- ence on Parallel Pro-cessing Workshops (ICPPW 2010), 13-16 Septem-ber 2010, pp. 533–541.
{kind=link}
{kind=link}
{kind=link}