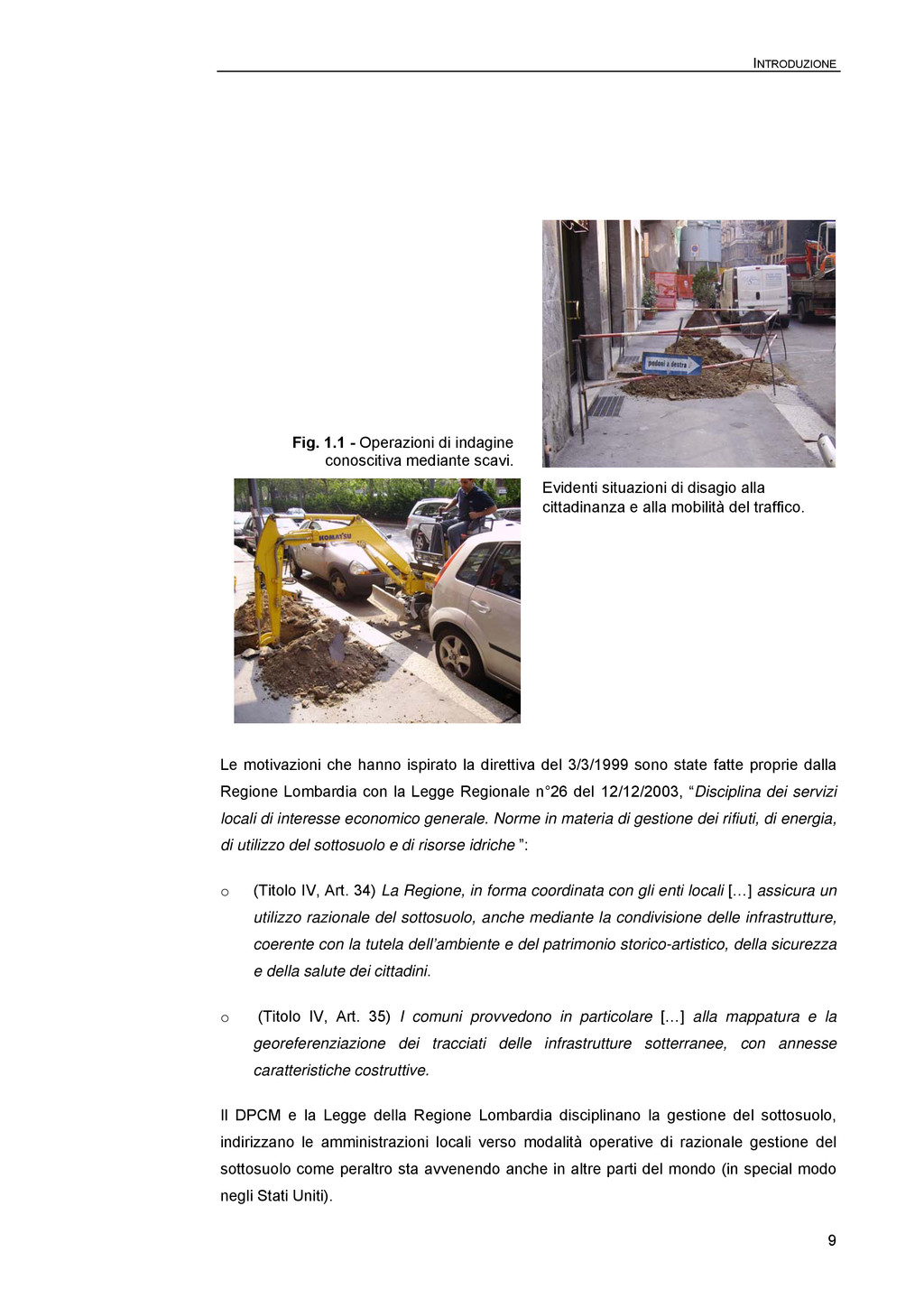
1. INTRODUZIONE La localizzazione delle condotte interrate costituisce una fase fondamentale della gestione del sottosuolo. Una corretta mappatura delle reti tecnologiche permette di realizzare una migliore attività di gestione dei lavori stradali e degli interventi di scavo e di minimizzare, conseguentemente, il disagio alla cittadinanza, alla vita pubblica, alle attività commerciali, con riduzione del traffico e dell’impatto sull’ambiente (Fig. 1.1). Il contenimento dell’impatto ambientale, del resto, è alla base della Direttiva della Presidenza del Consiglio dei Ministri (DPCM) sulla “Razionale sistemazione nel sottosuolo degli impianti tecnologici” del 3/3/1999 (Gazzetta Ufficiale n°58, 11/3/1999): o (Art. 1.3) […] ridurre per quanto possibile al minimo, lo smantellamento delle sedi stradali, le operazioni di scavo, lo smaltimento del materiale di risulta fino alle località di discarica ed il successivo ripristino della sede stradale. o (Art. 1.4) […] razionalizzare l'impiego del sottosuolo in modo da favorire il coordinamento degli interventi per la realizzazione delle opere, facilitando la necessaria tempestività degli interventi stessi al fine di consentire, nel contempo, la regolare agibilità del traffico ed evitare, per quanto possibile, il disagio alla popolazione dell'area interessata ai lavori ed alle attività commerciali ivi esistenti. o (Art. 1.5) […] promuovere la scelta di interventi che non comportino in prospettiva la diminuzione della fluidità del traffico per i ripetuti lavori interessanti le strade urbane, contribuendo così sia ad evitare gli effetti di congestionamento causato dalle sezioni occupate, sia a contenere i consumi energetici, ridurre i livelli di inquinamento, nonché l'impatto visivo al fine di salvaguardare l'ambiente ed il paesaggio e realizzare economie a lungo termine. È in questa direzione che si inserisce l’utilizzo di tecnologie di diagnostica che non prevedano la manomissione del sottosuolo: o (Art. 5.4) […] relativamente ai servizi interrati, qualora sussistano dubbi sulla effettiva localizzazione degli impianti tecnologici, deve essere valutata, di volta in volta, la possibilità di impiego di sistemi tecnici innovativi che consentano interventi nel sottosuolo senza l’effrazione della superficie, sia per la conoscenza di quanto sottostante (indagine geognostica), sia per la posa di cavi (perforazione orizzontale controllata). 8
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}