Share
レイトレ合宿9でのセミナーにて使用した発表スライドです.SVGFをザックリ解説しております.口頭での追加説明を前提としているところもありますが,他の資料と同じく参考にされるとイイ感じになると思います.誤り等ありましたらTwitter (@TTRS_Yoshi_CG)までお願いします.
{kind=link}
![SVGFとは 画像は[1]より引用](https://files.speakerdeck.com/presentations/e518161ad3f643a092b69e36f748e65c/slide_1.jpg){kind=link}
{kind=link}
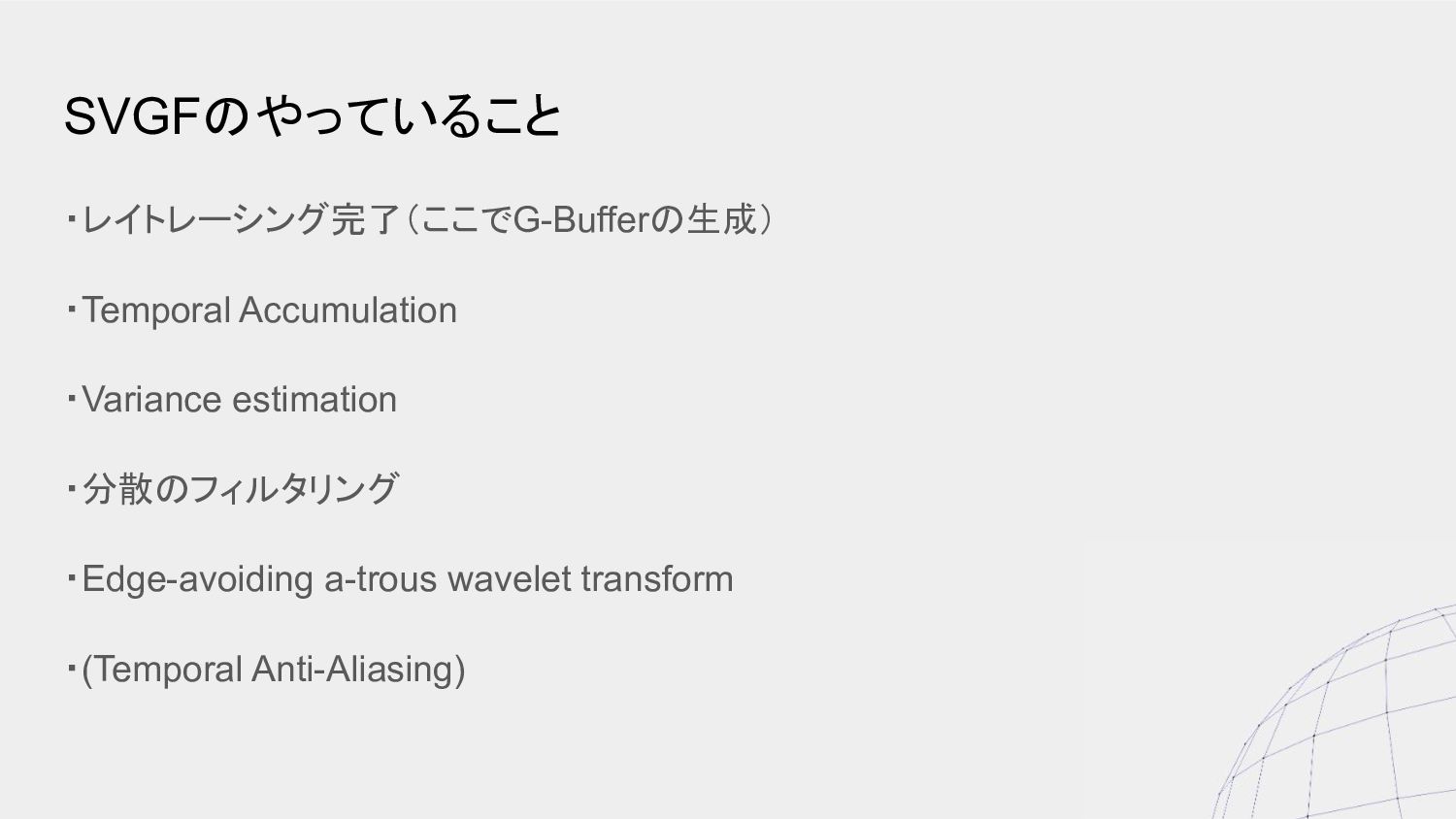
![SVGFのやっていること 画像は[1]より引用](https://files.speakerdeck.com/presentations/e518161ad3f643a092b69e36f748e65c/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
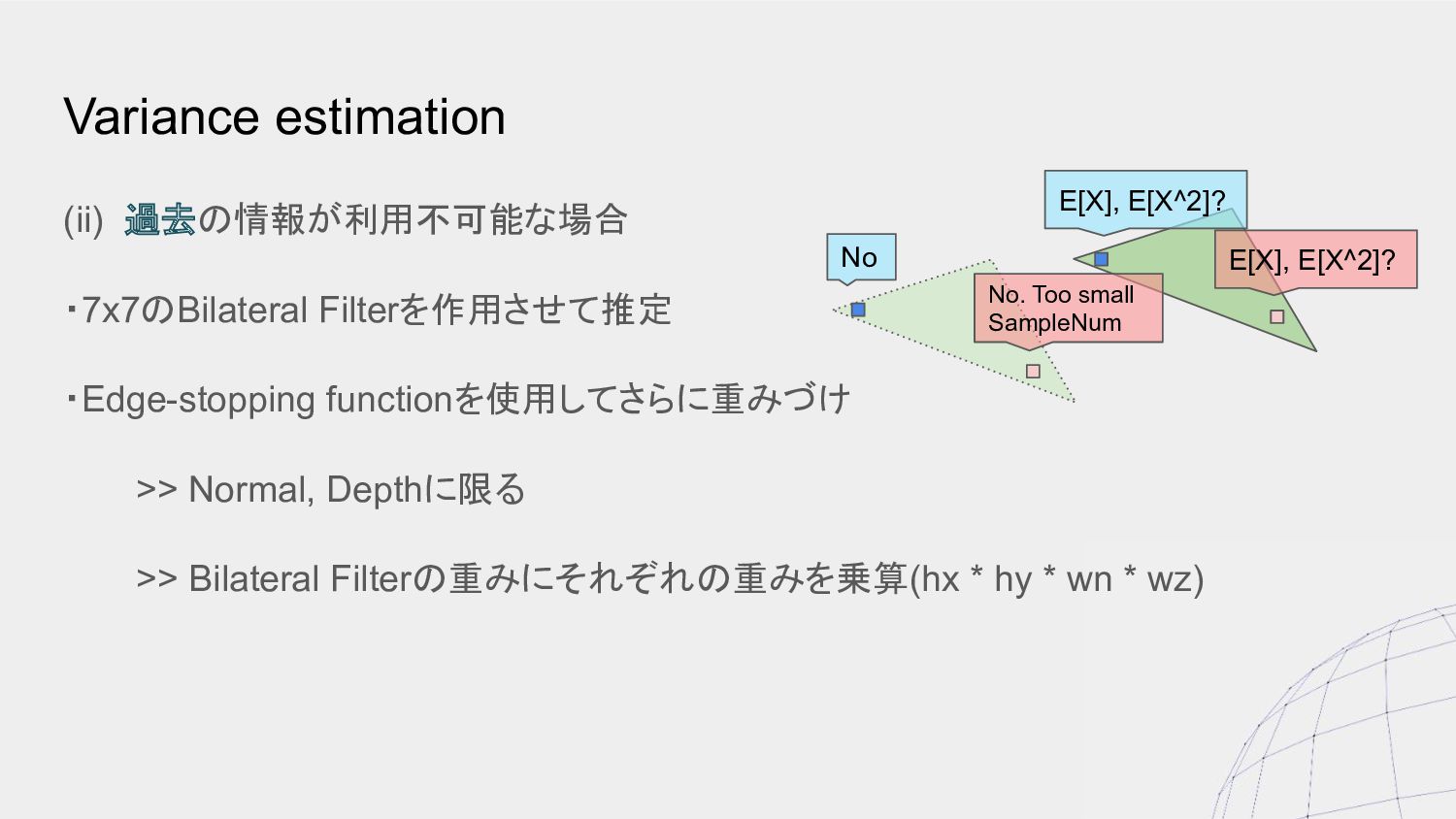
![Variance estimation (i) 過去の情報が利用可能な場合 ・ 過去のE[X^2] と E[X]を読み込む ・レイトレの結果得られた放射輝度(Radiance)を用いて 輝度(Luminance)と輝度の2乗を計算](https://files.speakerdeck.com/presentations/e518161ad3f643a092b69e36f748e65c/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![SVGFのやっていること(再掲) 画像は[1]より引用](https://files.speakerdeck.com/presentations/e518161ad3f643a092b69e36f748e65c/slide_18.jpg){kind=link}
![SVGFの問題点 ・Specularなどの成分に関しては上手くできない ・Temporal Accumulationは静的なシーン限定 ・光源パスの少ない箇所では上手くいかない 等々 画像は[1]より引用](https://files.speakerdeck.com/presentations/e518161ad3f643a092b69e36f748e65c/slide_19.jpg){kind=link}
{kind=link}
![参考文献 [1] Christoph. S. et.al. Spatiotemporal Variance-Guided Filtering: Real-Time Reconstruction](https://files.speakerdeck.com/presentations/e518161ad3f643a092b69e36f748e65c/slide_21.jpg){kind=link}
{kind=link}