Presentation slides for the 16th International Conference on Travel Behavior Research (IATBR) at Santiago, Chile, entitled "A dynamic activity scheduling model for correcting fatalities’ non-response bias in tsunami evacuation."
in tsunami evacuation Satoki Masuda, The University of Tokyo Takuya Iizuka, Hitachi Ltd Eiji Hato*, The University of Tokyo *Corresponding author 16th International Conference on Travel Behavior Research @ Santiago, Chile Thu. 15 Dec. 9:00-10:40, Room 207, Travel Behavior Applications II
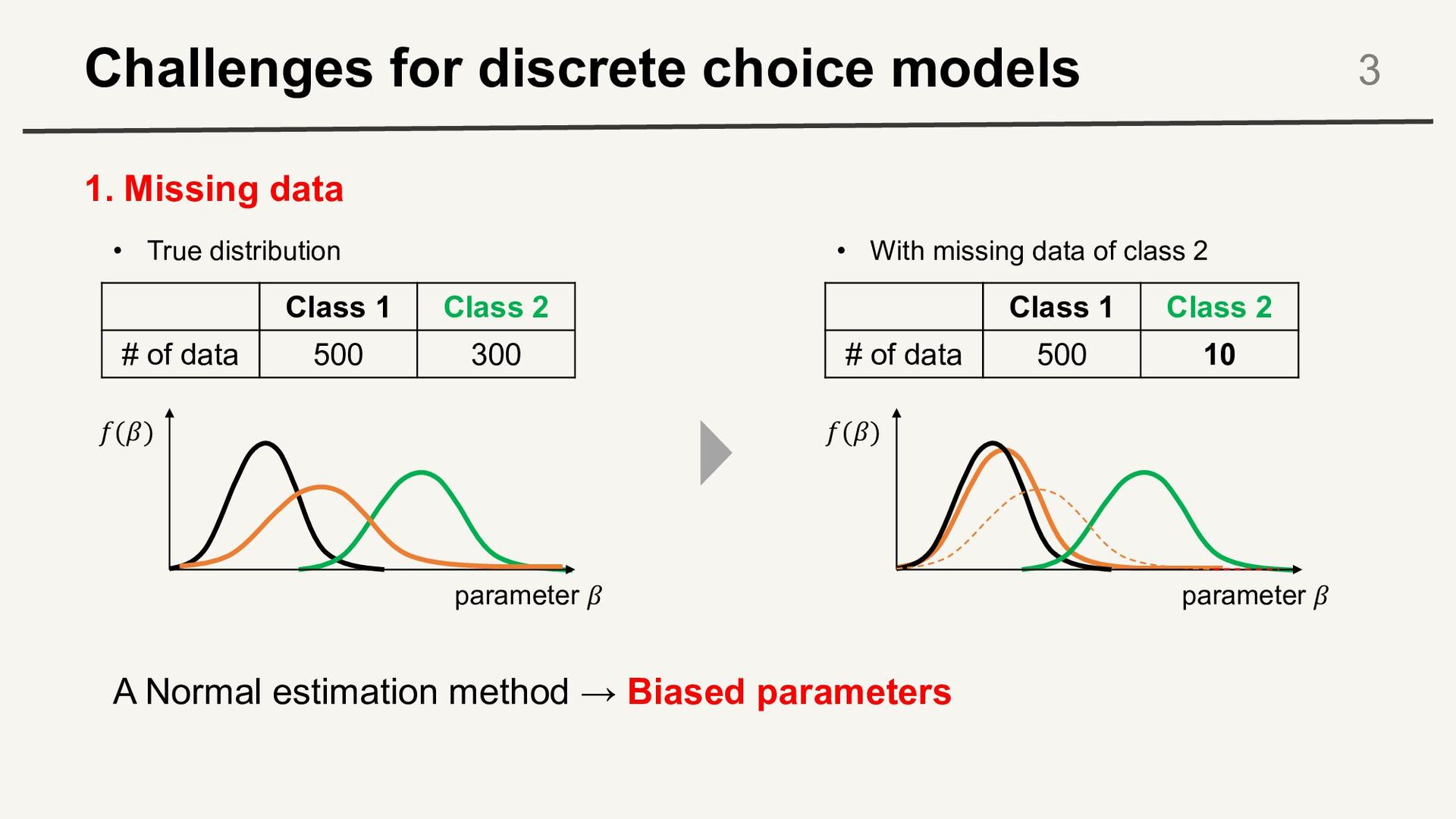
1 Class 2 # of data 500 300 Class 1 Class 2 # of data 500 10 A Normal estimation method → Biased parameters parameter ! "(!) parameter ! "(!) • True distribution • With missing data of class 2
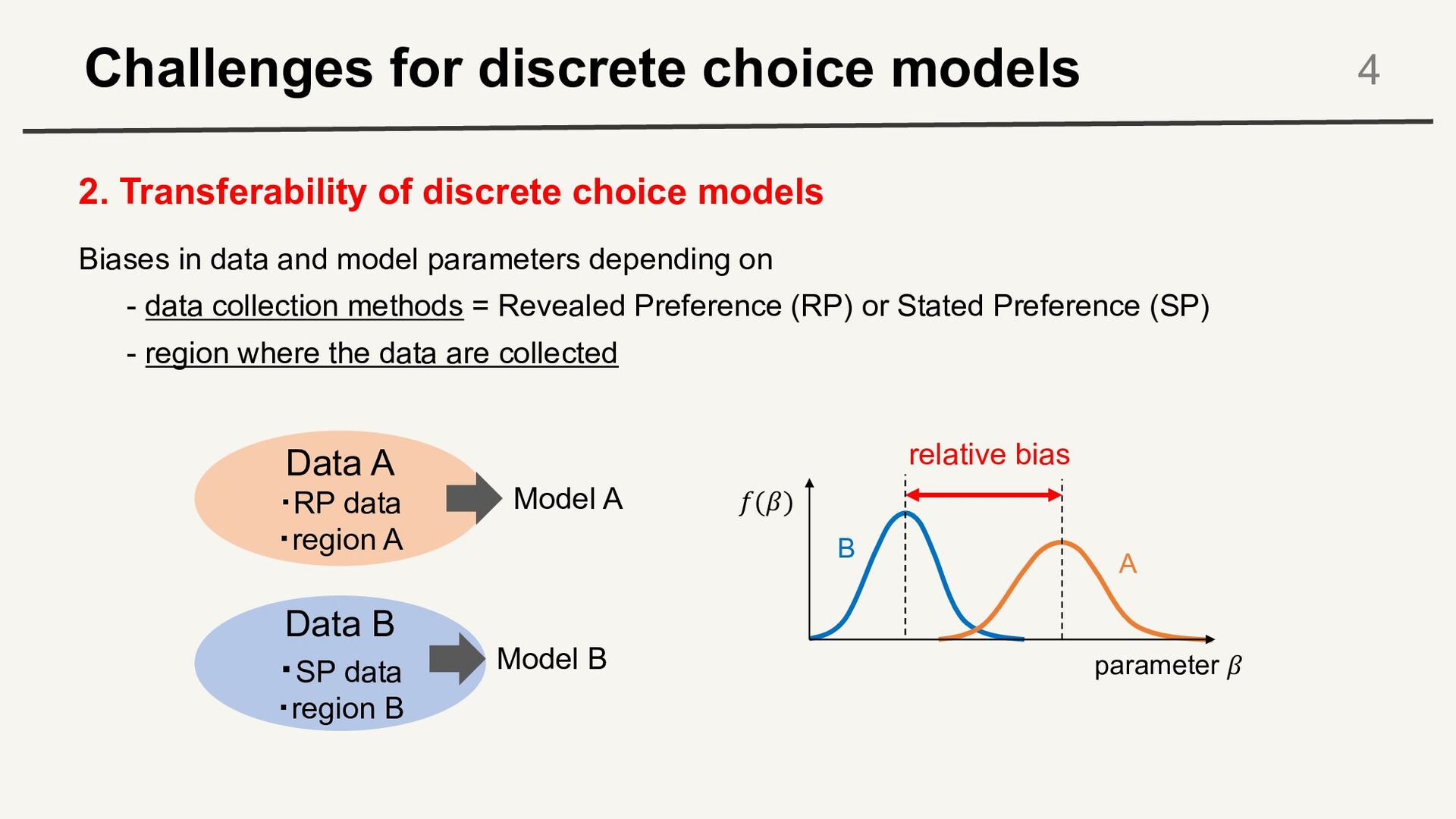
models Biases in data and model parameters depending on - data collection methods = Revealed Preference (RP) or Stated Preference (SP) - region where the data are collected 4 Data A ・RP data ・region A Model A Data B ・SP data ・region B Model B parameter ! "(!) relative bias B A
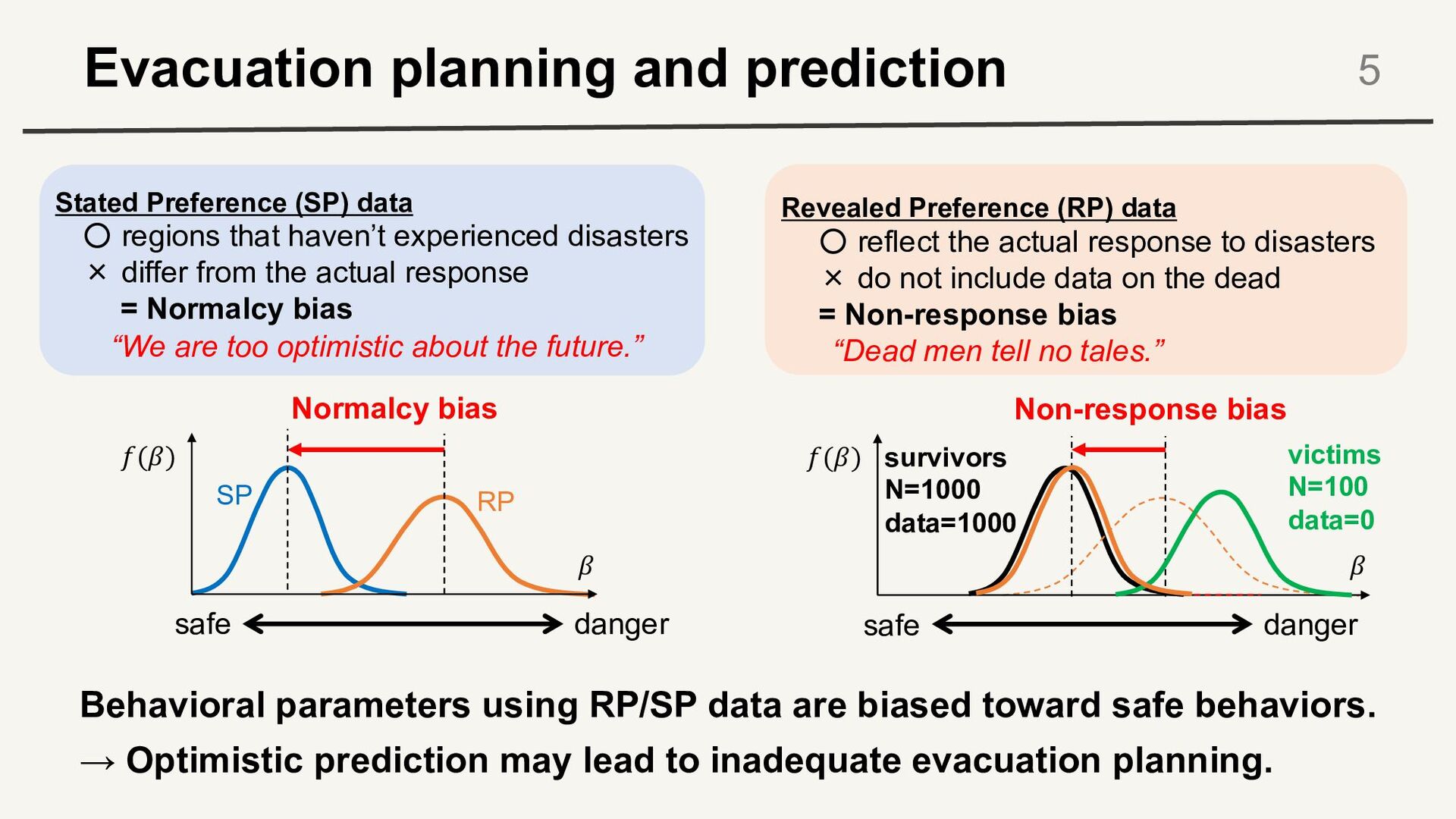
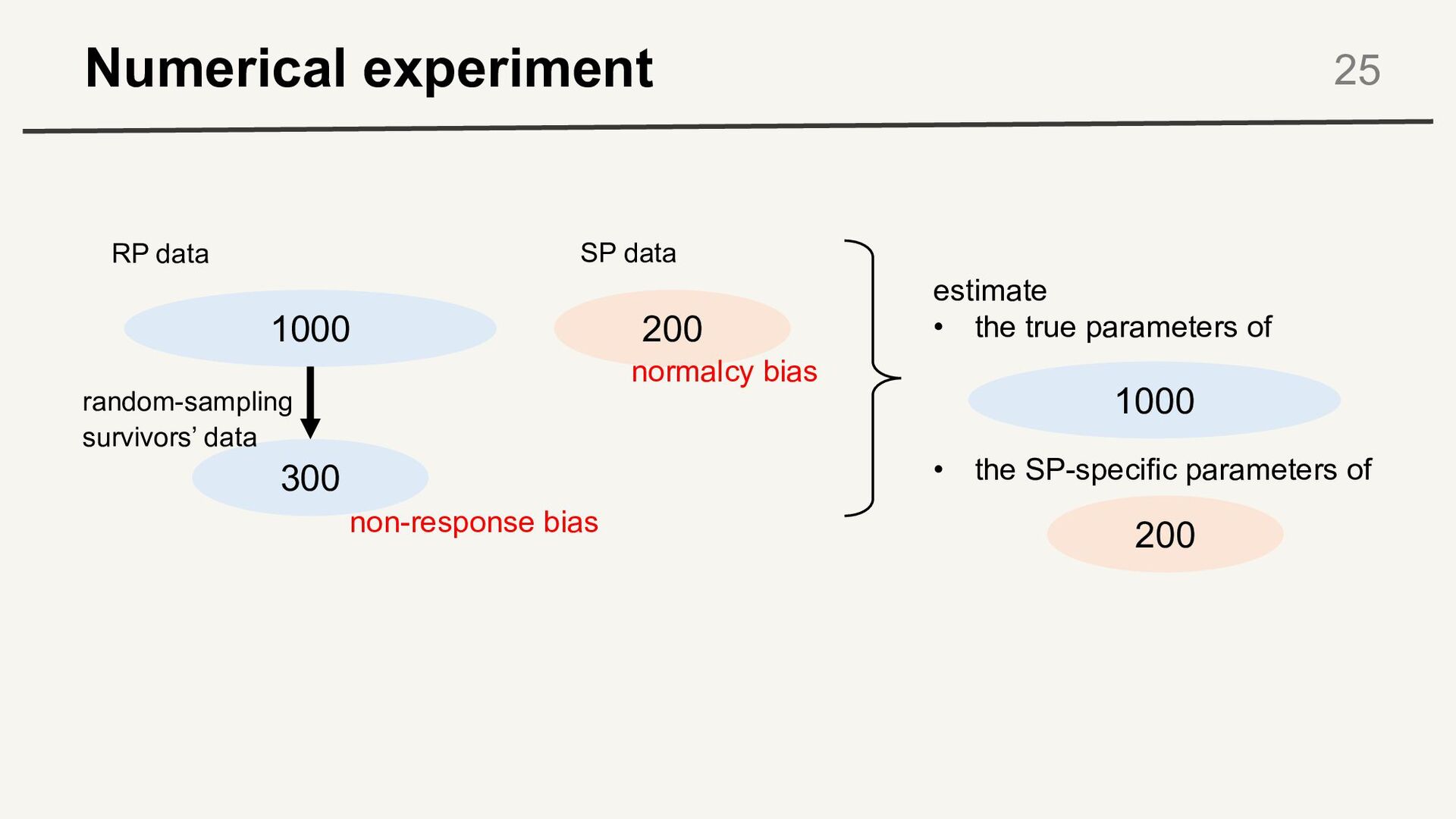
“We are too optimistic about the future.” → Optimistic prediction may lead to inadequate evacuation planning. Behavioral parameters using RP/SP data are biased toward safe behaviors. Revealed Preference (RP) data ◦ reflect the actual response to disasters × do not include data on the dead = Non-response bias Stated Preference (SP) data ◦ regions that haven’t experienced disasters × differ from the actual response = Normalcy bias ! "(!) Normalcy bias safe danger SP RP "(!) safe danger ! Non-response bias survivors N=1000 data=1000 victims N=100 data=0
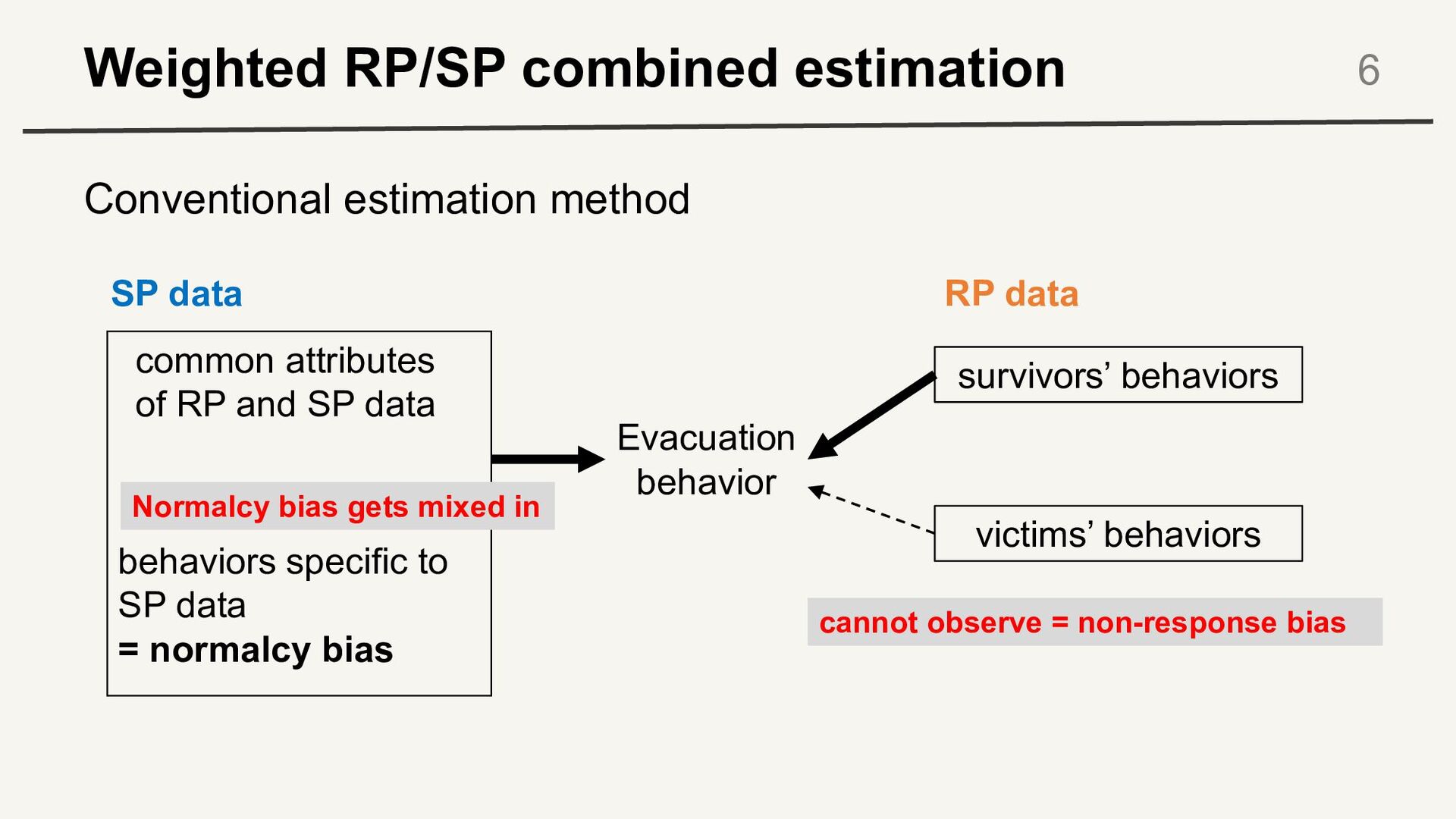
SP data = normalcy bias common attributes of RP and SP data victims’ behaviors cannot observe = non-response bias survivors’ behaviors Conventional estimation method Normalcy bias gets mixed in RP data SP data
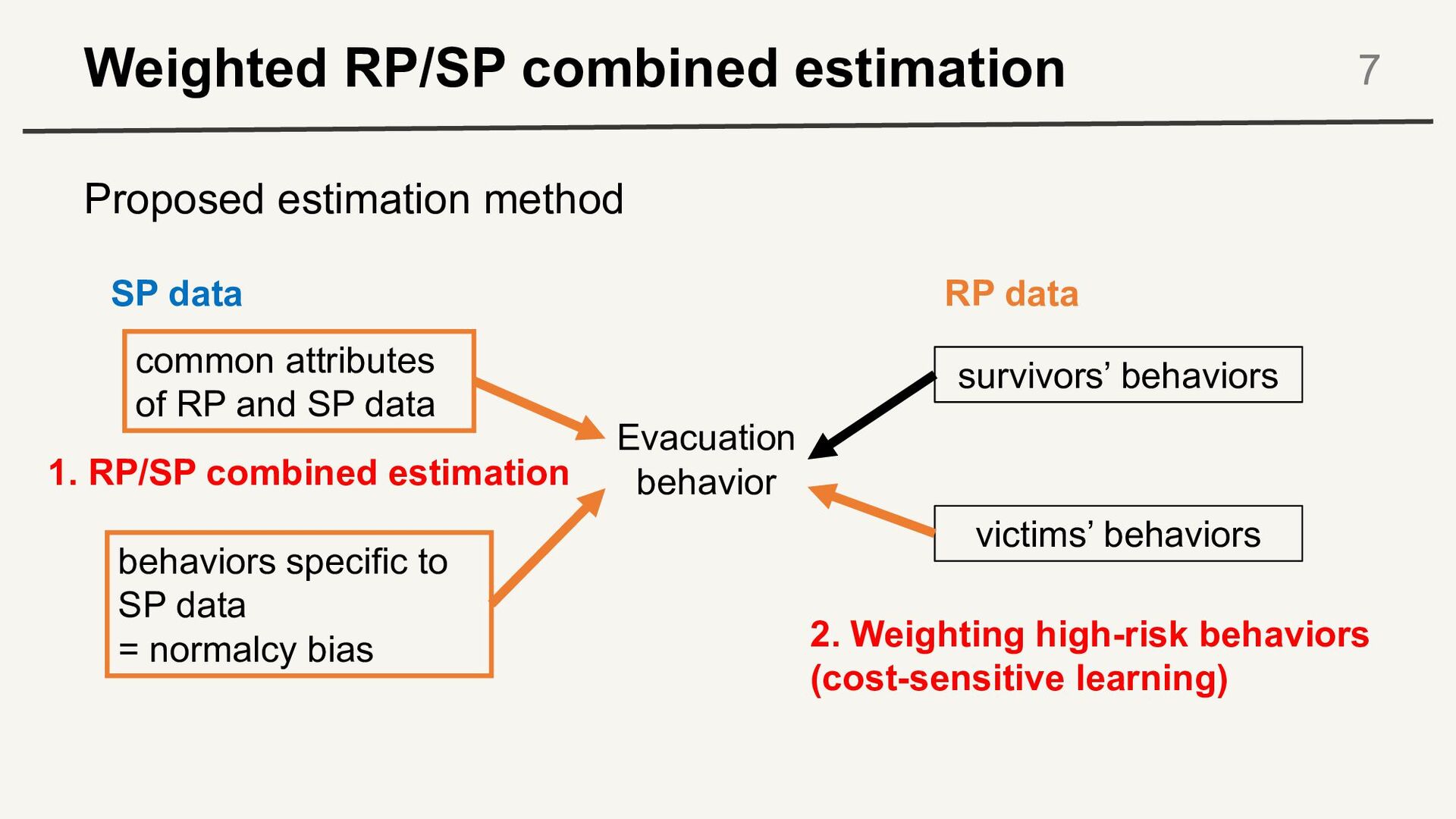
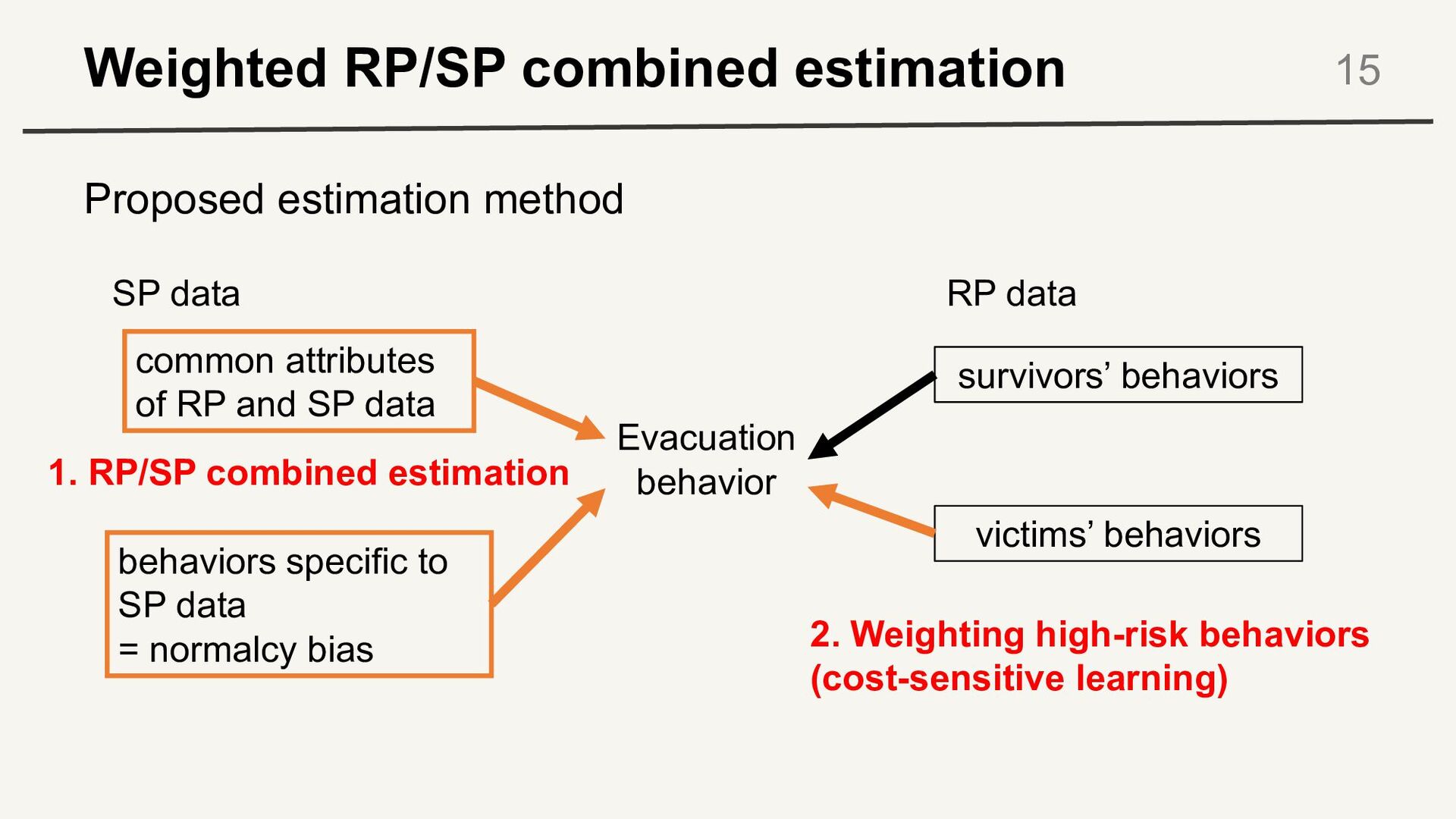
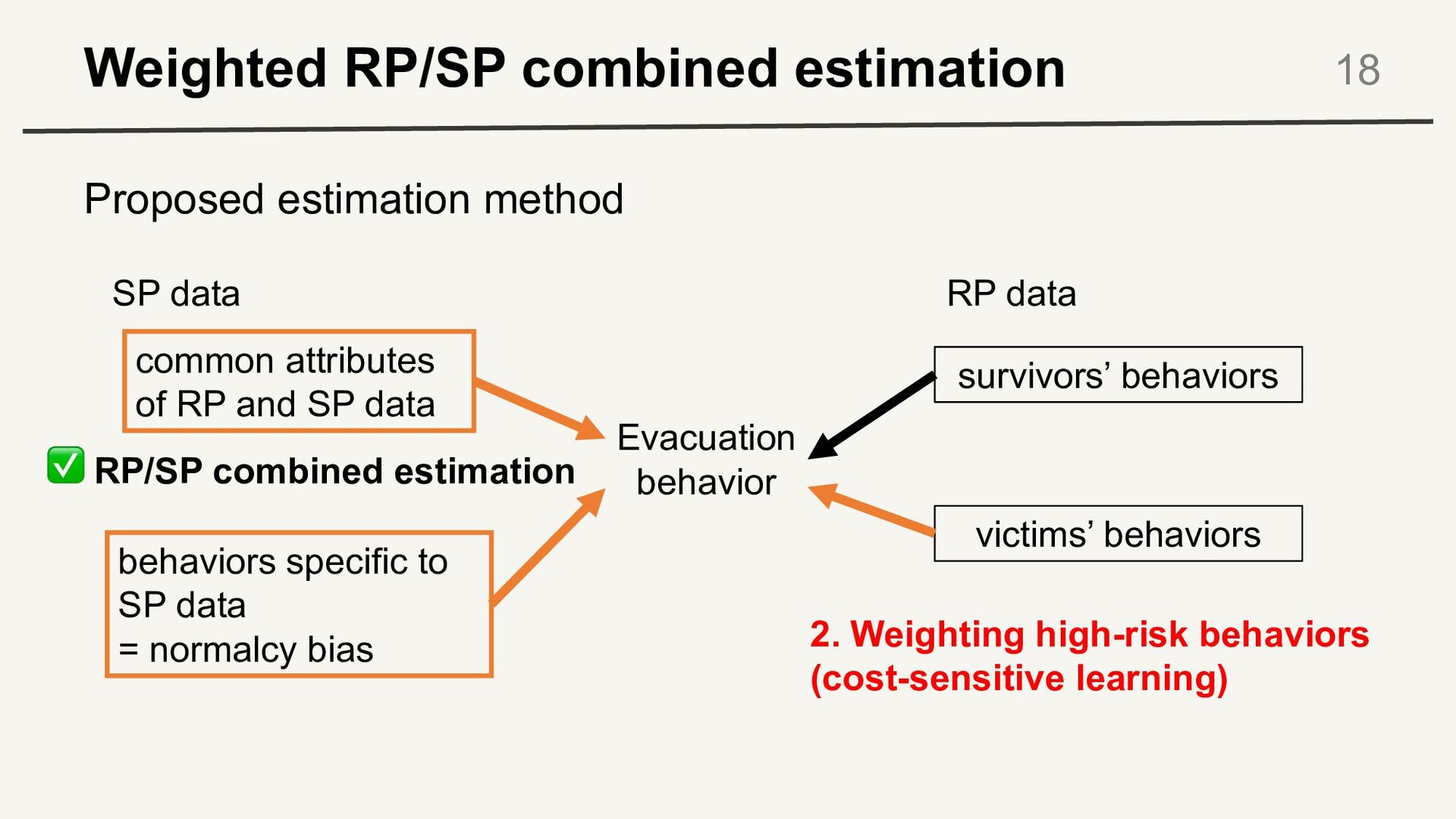
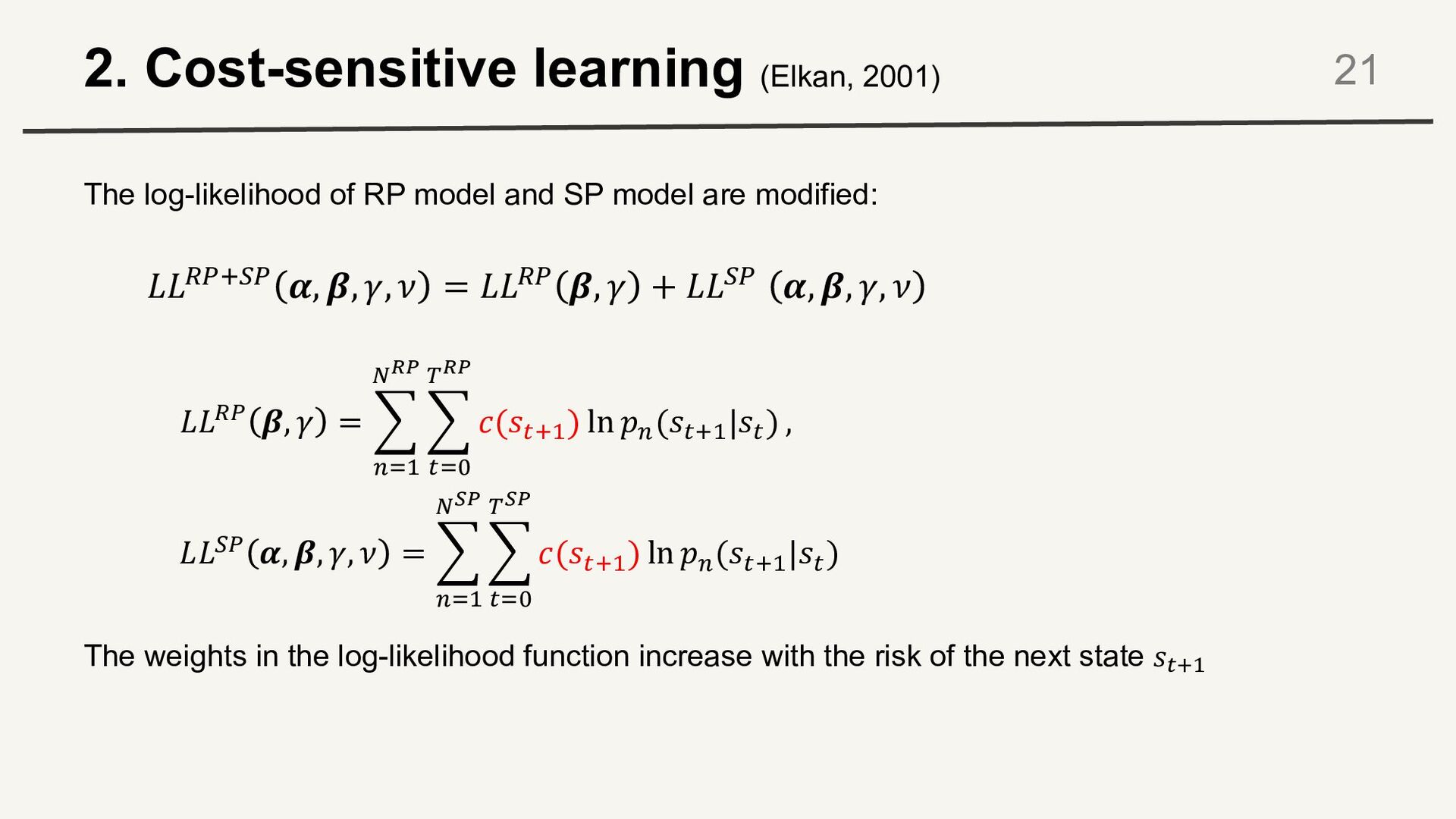
SP data = normalcy bias common attributes of RP and SP data victims’ behaviors survivors’ behaviors RP data SP data 1. RP/SP combined estimation 2. Weighting high-risk behaviors (cost-sensitive learning) Proposed estimation method
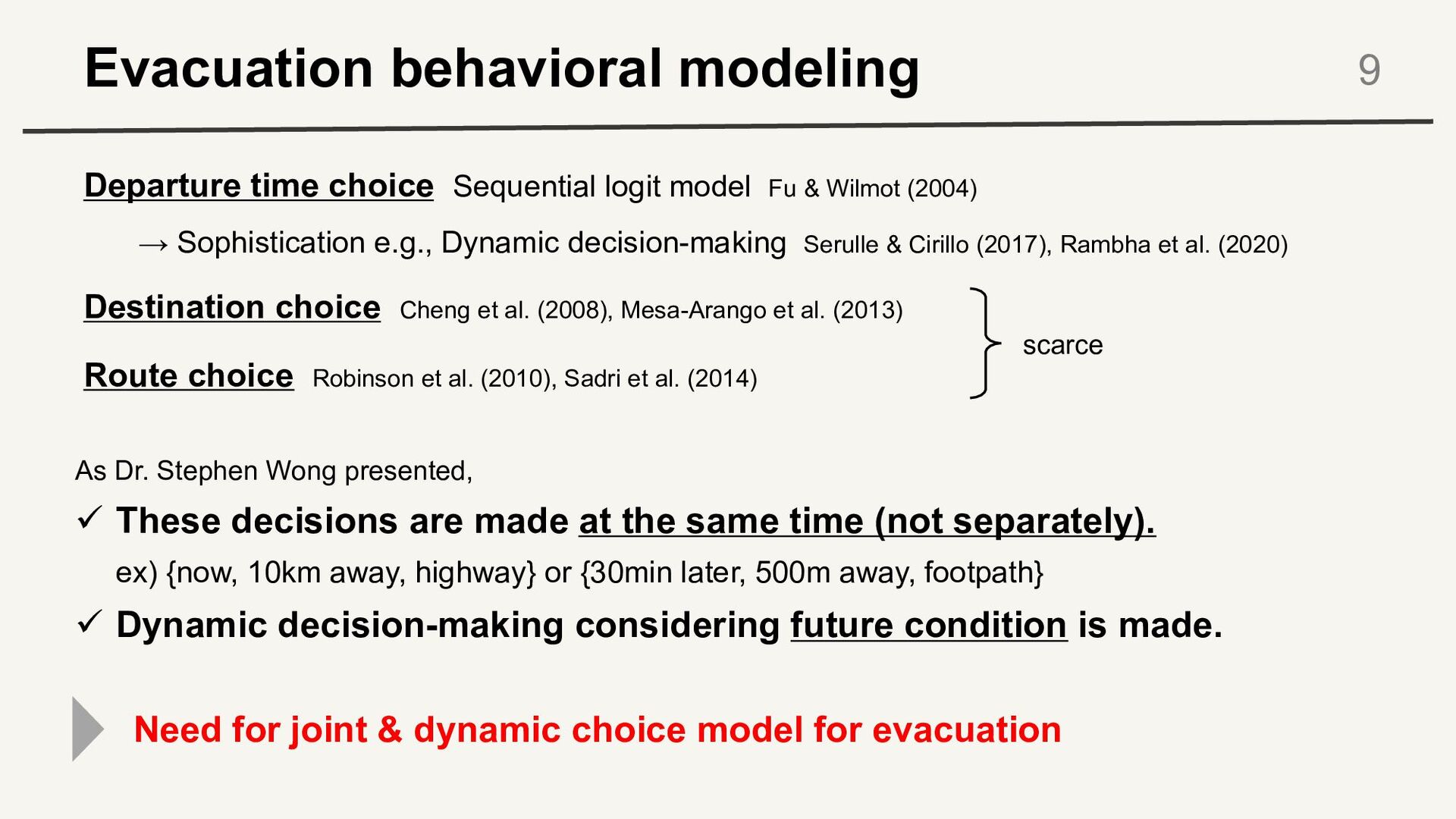
& Wilmot (2004) → Sophistication e.g., Dynamic decision-making Serulle & Cirillo (2017), Rambha et al. (2020) Destination choice Cheng et al. (2008), Mesa-Arango et al. (2013) Route choice Robinson et al. (2010), Sadri et al. (2014) 9 scarce As Dr. Stephen Wong presented, ü These decisions are made at the same time (not separately). ex) {now, 10km away, highway} or {30min later, 500m away, footpath} ü Dynamic decision-making considering future condition is made. Need for joint & dynamic choice model for evacuation
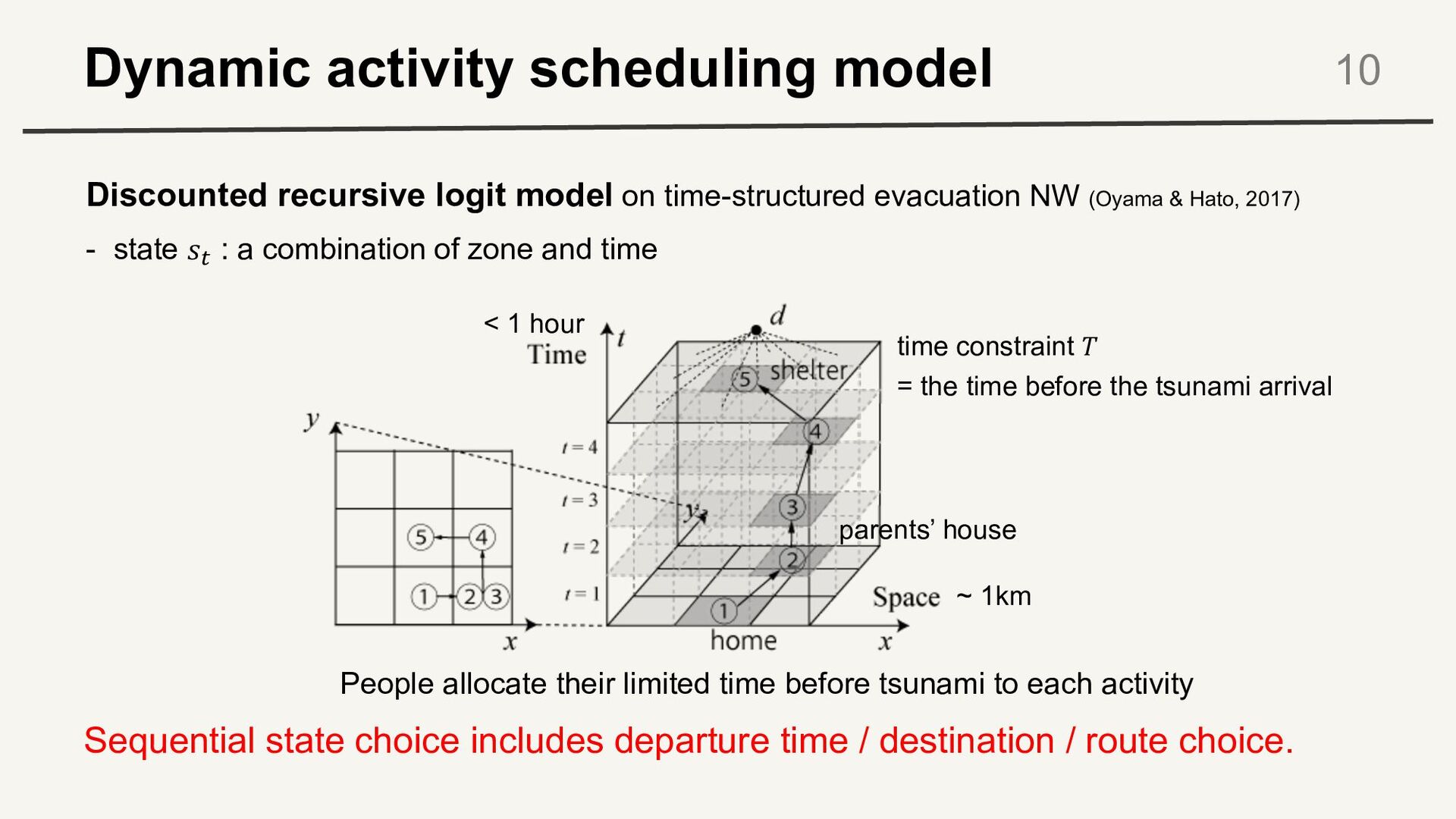
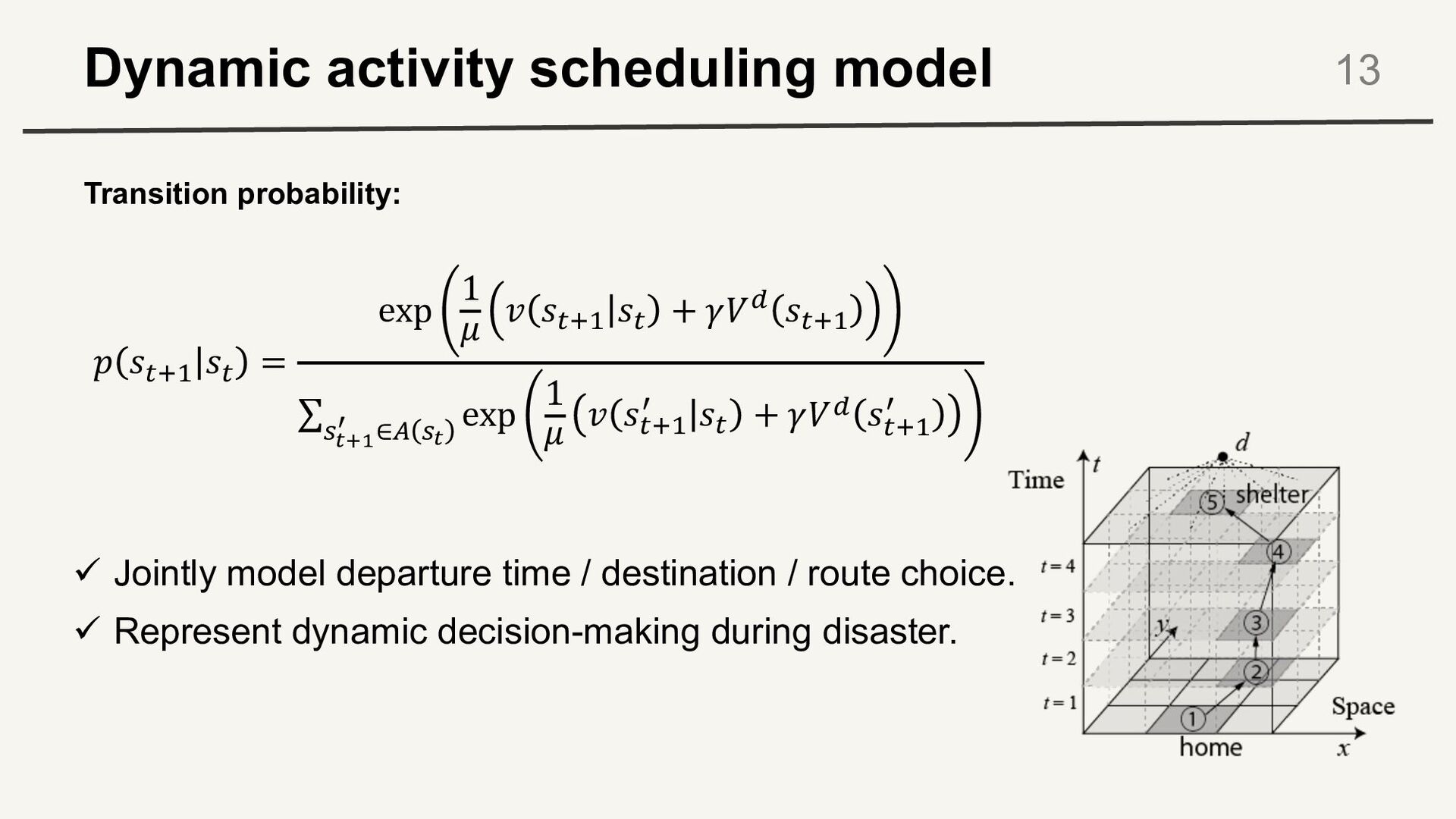
time-structured evacuation NW (Oyama & Hato, 2017) - state !! : a combination of zone and time time constraint % ~ 1km < 1 hour Sequential state choice includes departure time / destination / route choice. parents’ house = the time before the tsunami arrival People allocate their limited time before tsunami to each activity
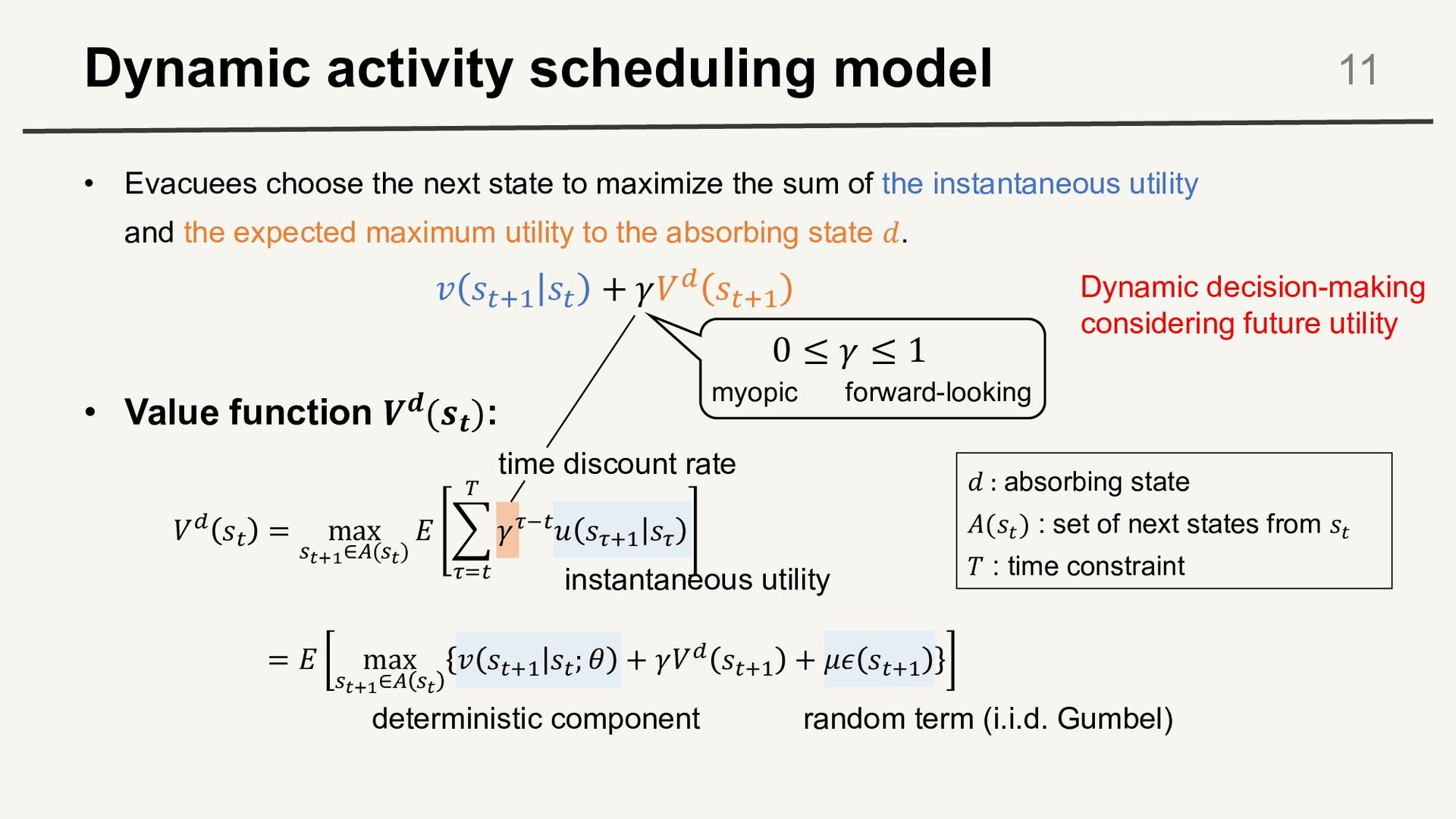
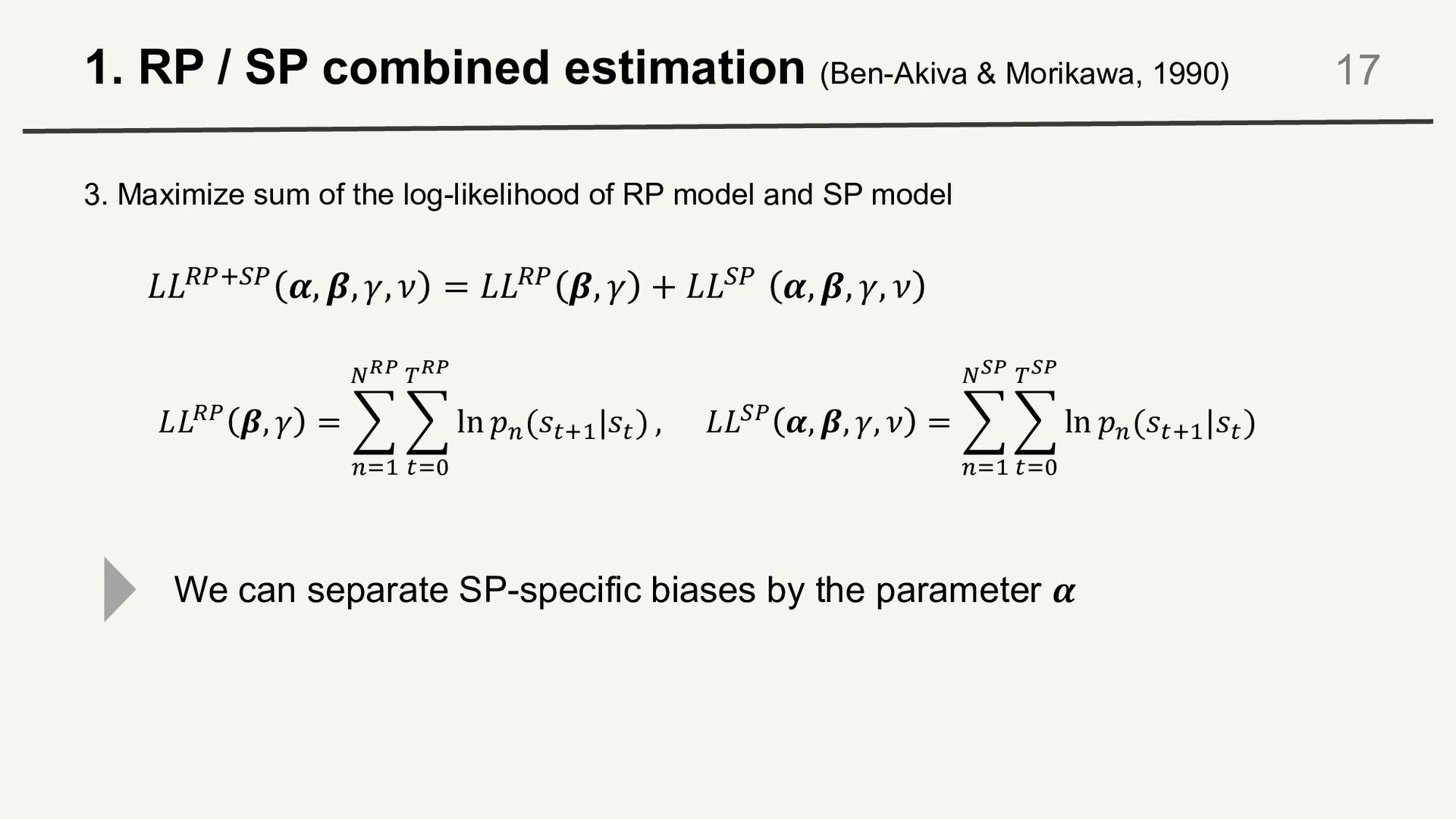
): ( : absorbing state +(,!) : set of next states from ,! % : time constraint = # max "!"#∈$ "! ' !!%& !! ; ) + +,' !!%& + -. !!%& random term (i.i.d. Gumbel) deterministic component ,' !! = max "!"#∈$("!) # / *+! , +*-!0 !*%& !* instantaneous utility time discount rate • Evacuees choose the next state to maximize the sum of the instantaneous utility and the expected maximum utility to the absorbing state 1. % & -./ & - + ()0 & -./ Dynamic decision-making considering future utility 0 ≤ ( ≤ 1 myopic forward-looking
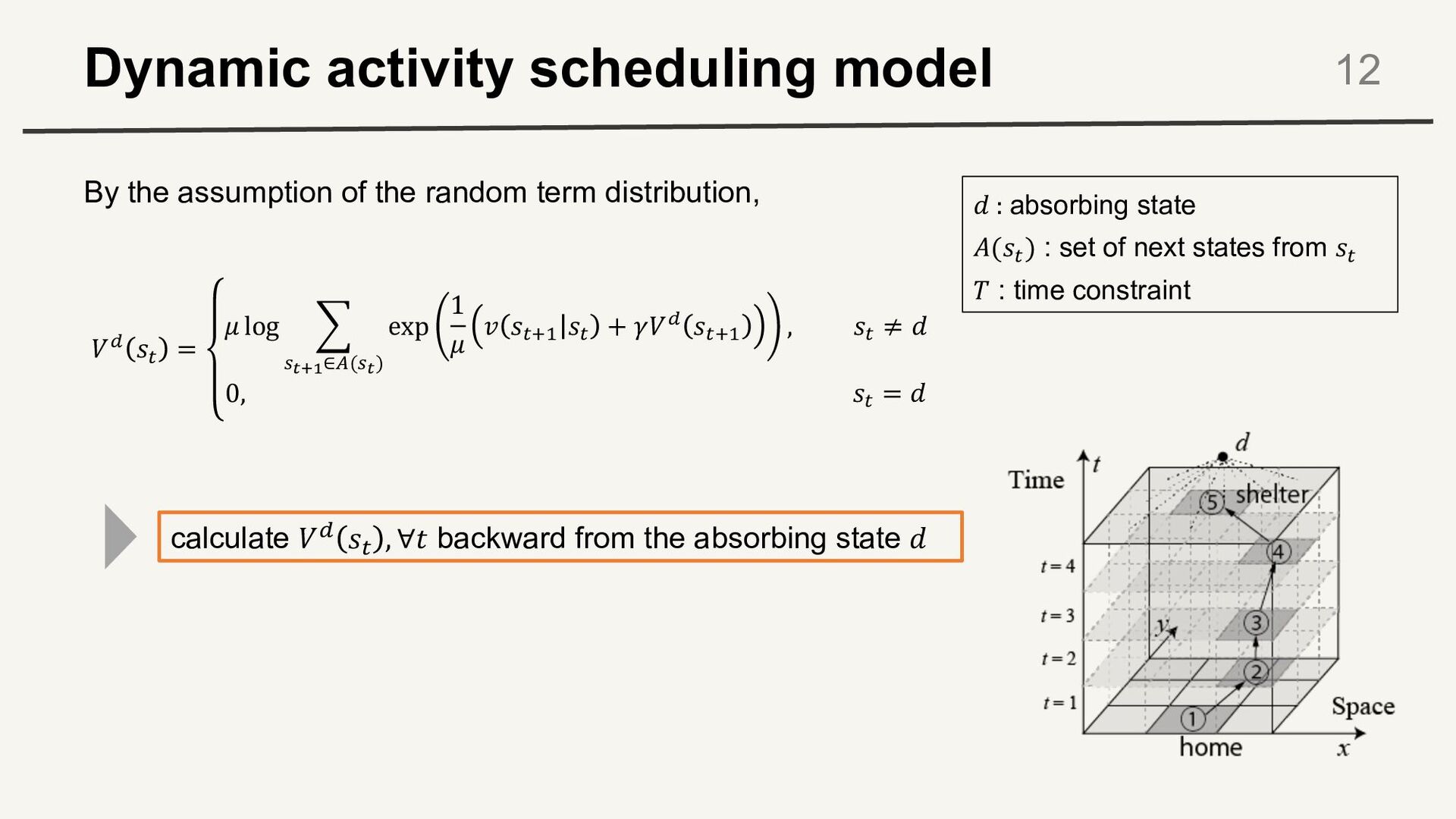
7 #!"#∈%(#!) exp 1 3 < ,!() ,! + >1" ,!() , ,! ≠ ( 0, ,! = ( By the assumption of the random term distribution, calculate ,' !! , ∀4 backward from the absorbing state 1 ( : absorbing state +(,!) : set of next states from ,! % : time constraint
SP data = normalcy bias common attributes of RP and SP data victims’ behaviors survivors’ behaviors RP data SP data 1. RP/SP combined estimation 2. Weighting high-risk behaviors (cost-sensitive learning) Proposed estimation method
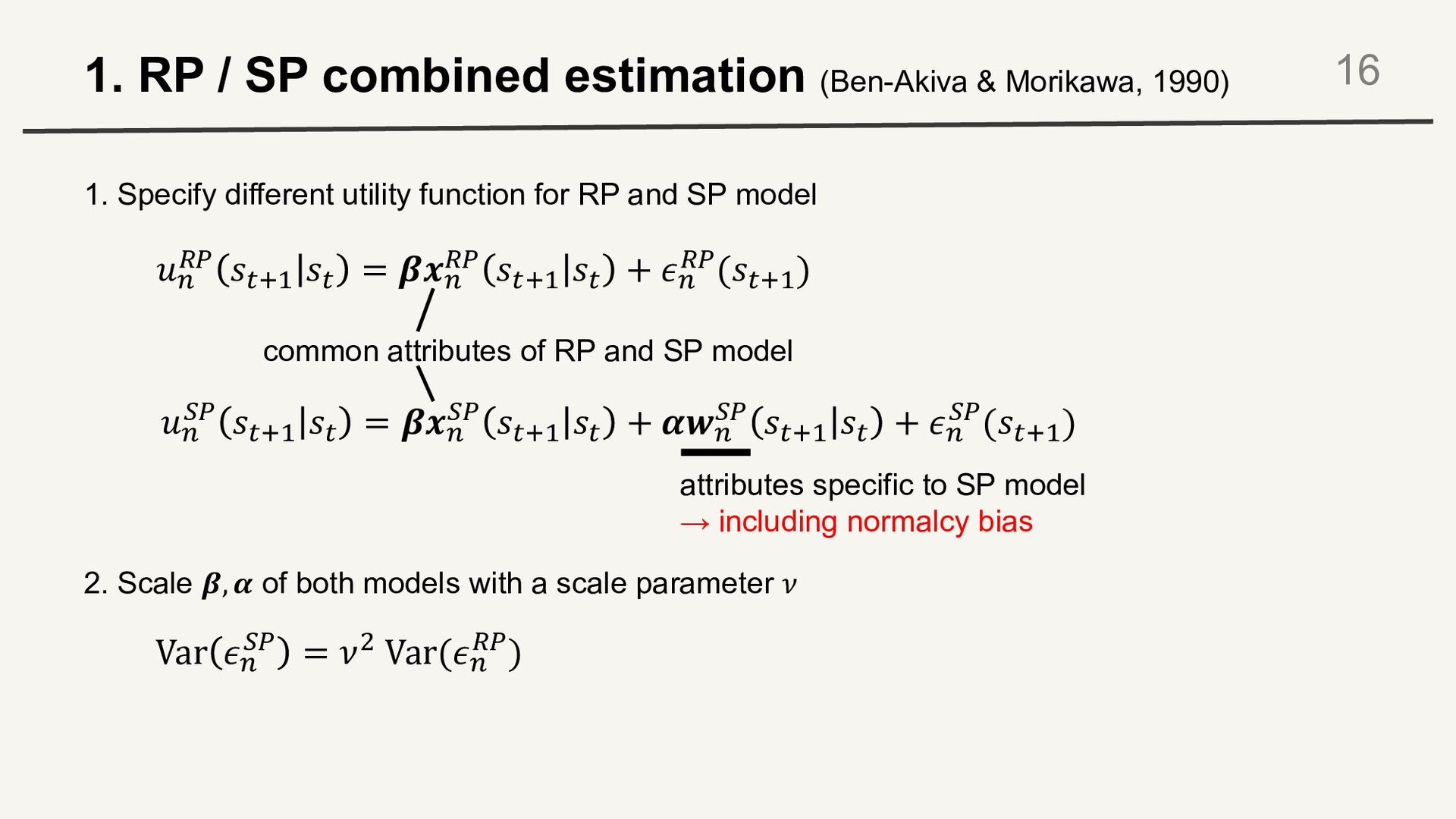
1. Specify different utility function for RP and SP model 16 4 F GH & -./ & - = 56 F GH & -./ & - + 7 F GH(& -./ ) 4 F IH & -./ & - = 56 F IH & -./ & - + 89 F IH & -./ & - + 7 F IH(& -./ ) common attributes of RP and SP model attributes specific to SP model → including normalcy bias 2. Scale 5, 6 of both models with a scale parameter 7 Var 7 F IH = =J Var(7 F GH)
SP data = normalcy bias common attributes of RP and SP data victims’ behaviors survivors’ behaviors RP data SP data 2. Weighting high-risk behaviors (cost-sensitive learning) Proposed estimation method ✅ RP/SP combined estimation
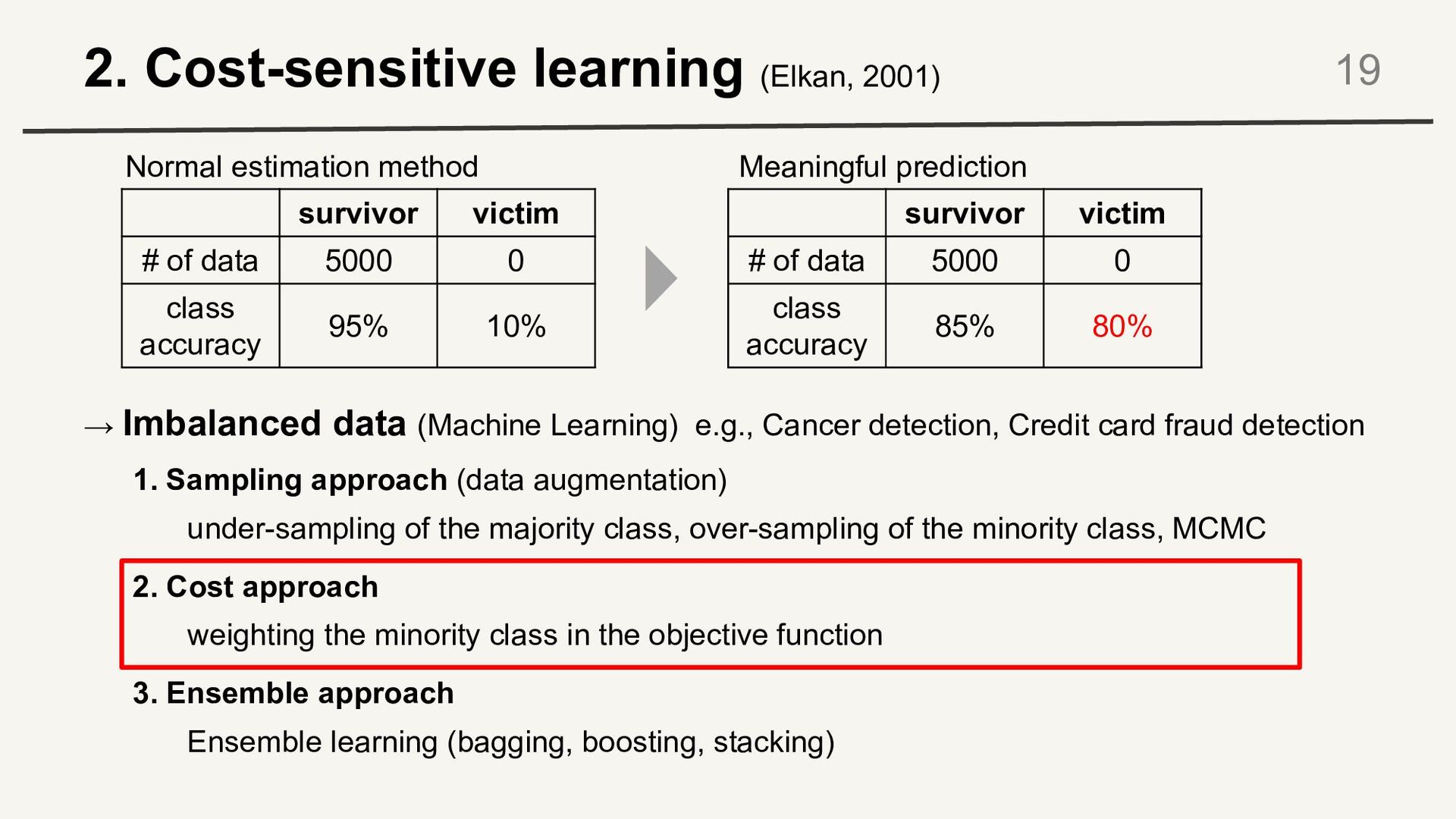
e.g., Cancer detection, Credit card fraud detection 19 1. Sampling approach (data augmentation) under-sampling of the majority class, over-sampling of the minority class, MCMC 2. Cost approach weighting the minority class in the objective function 3. Ensemble approach Ensemble learning (bagging, boosting, stacking) survivor victim # of data 5000 0 class accuracy 95% 10% survivor victim # of data 5000 0 class accuracy 85% 80% Normal estimation method Meaningful prediction
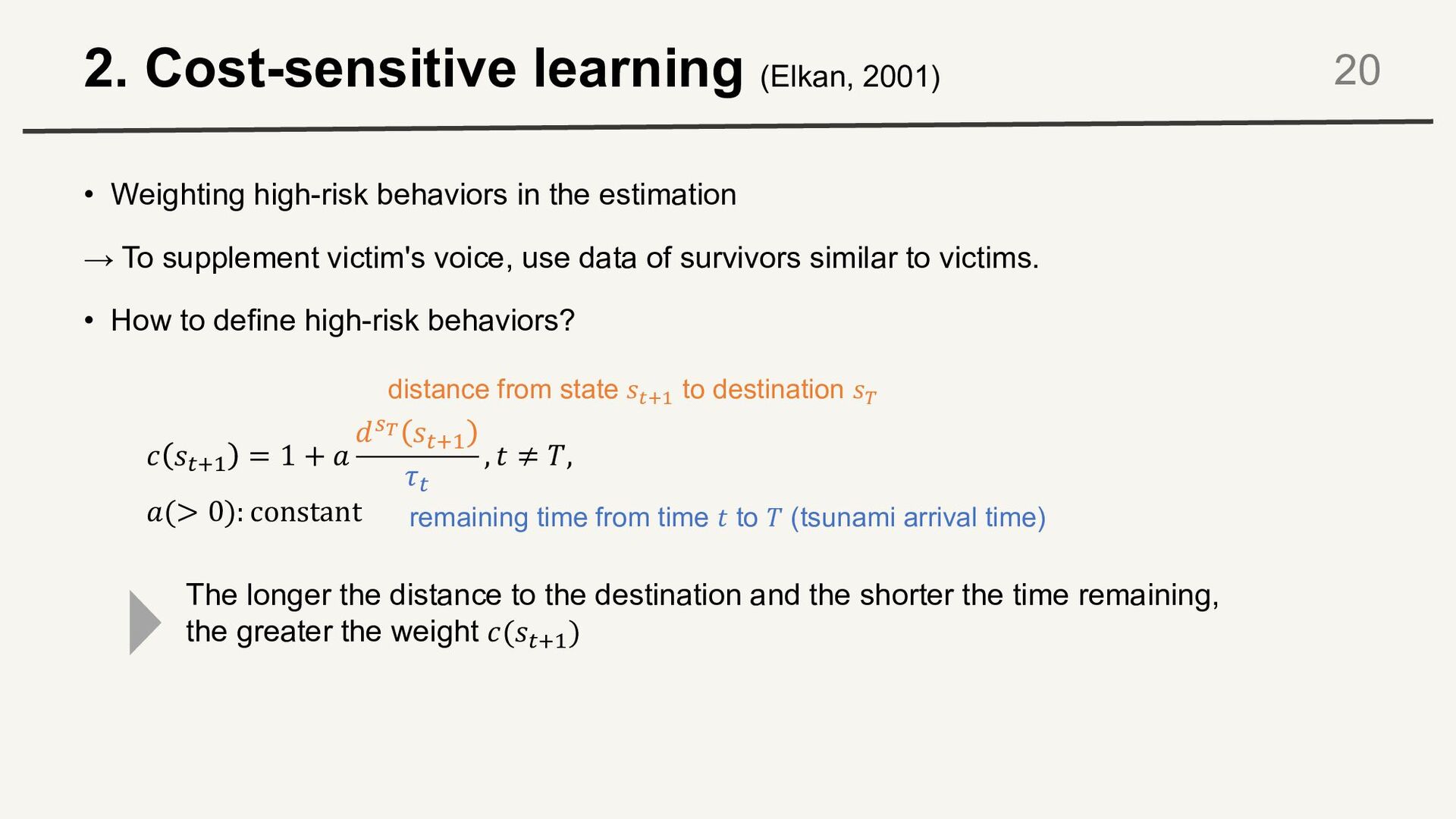
the estimation → To supplement victim's voice, use data of survivors similar to victims. • How to define high-risk behaviors? 20 8 !!%& = 1 + : 1"$ !!%& ;! , 4 ≠ =, :(> 0): constant distance from state ,!() to destination ,- remaining time from time K to % (tsunami arrival time) The longer the distance to the destination and the shorter the time remaining, the greater the weight 8(!!%& )
SP data = normalcy bias common attributes of RP and SP data victims’ behaviors survivors’ behaviors RP data SP data Proposed estimation method ✅ RP/SP combined estimation ✅ Weighting high-risk behaviors (cost-sensitive learning)
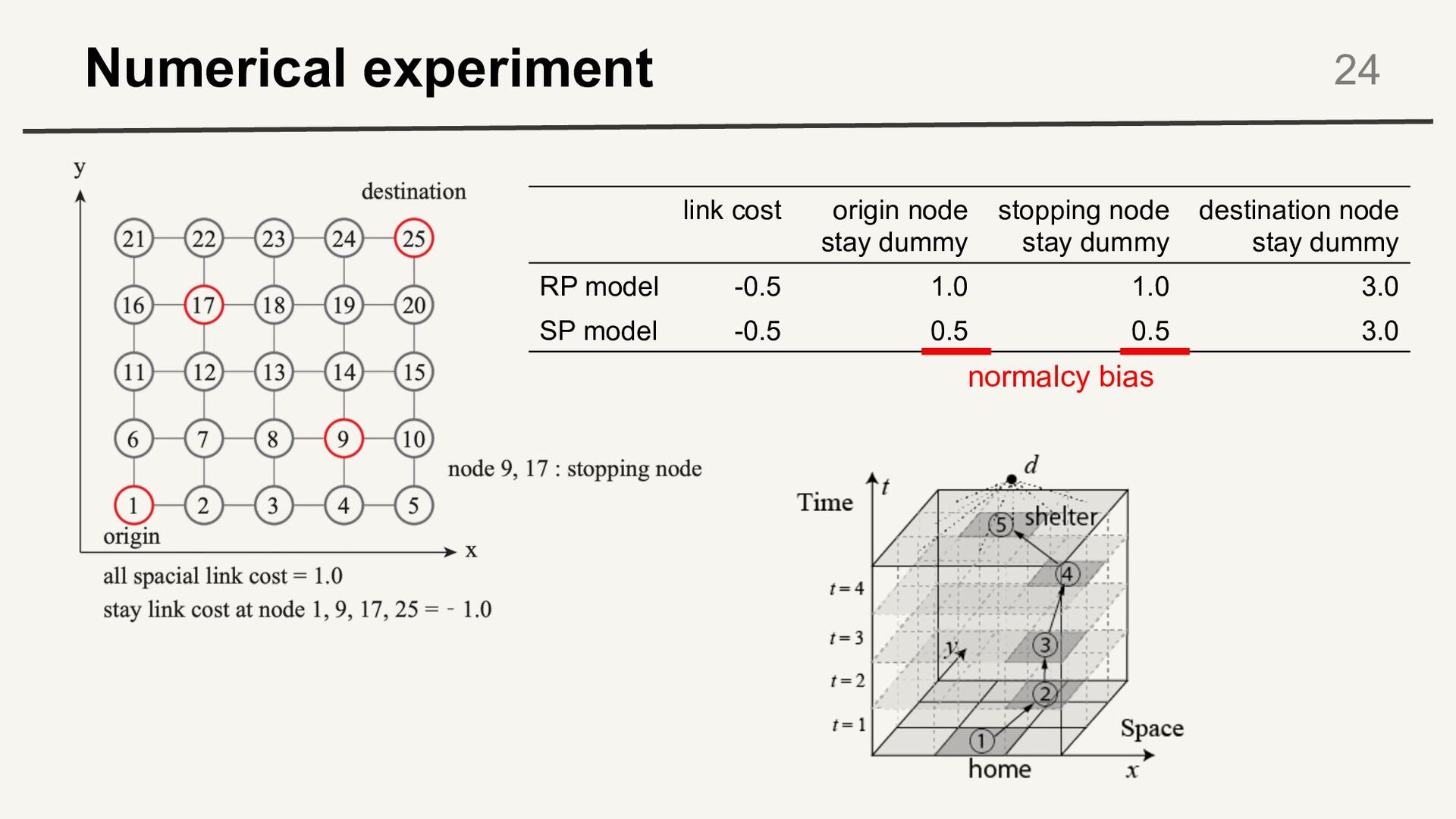
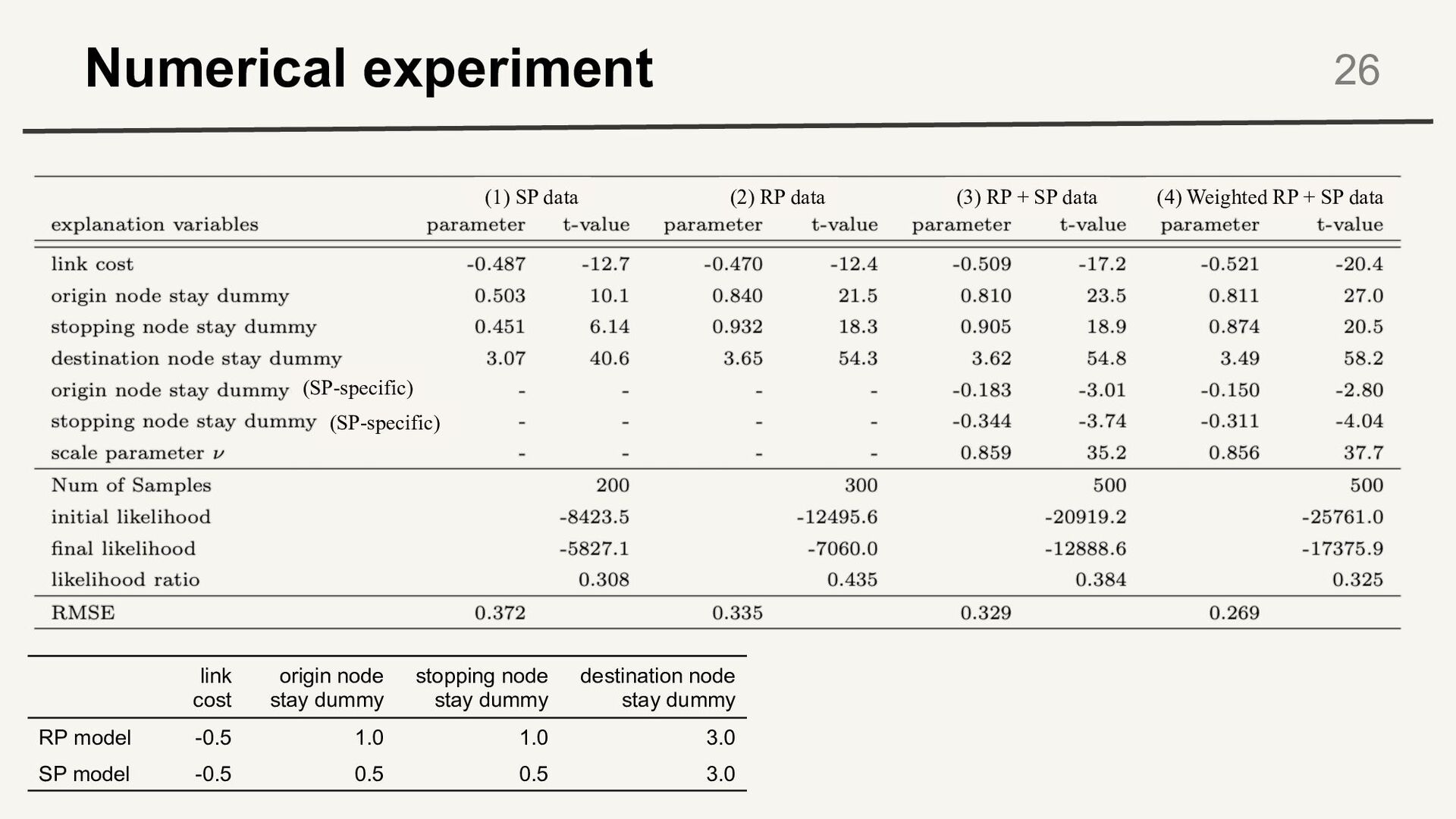
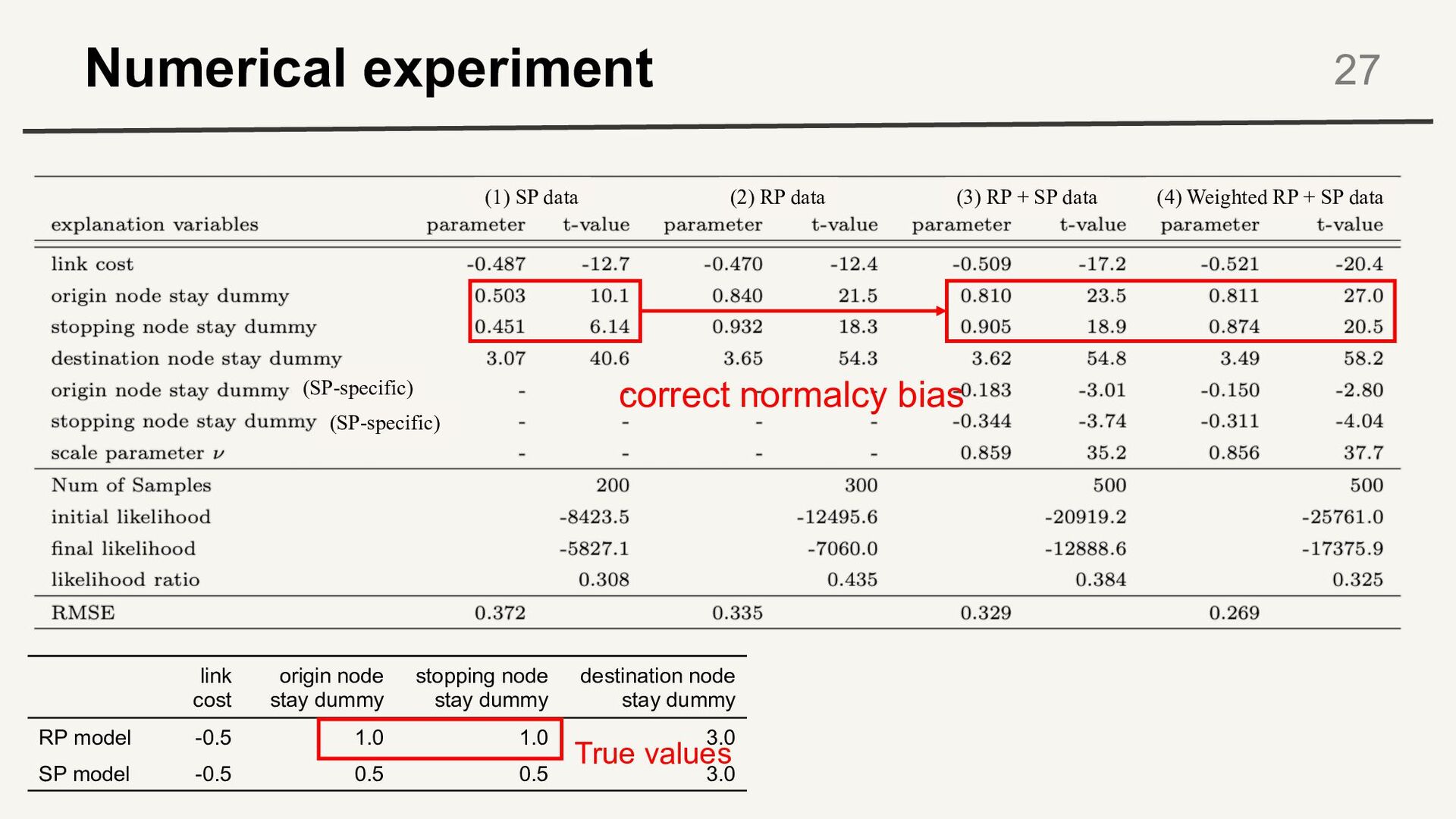
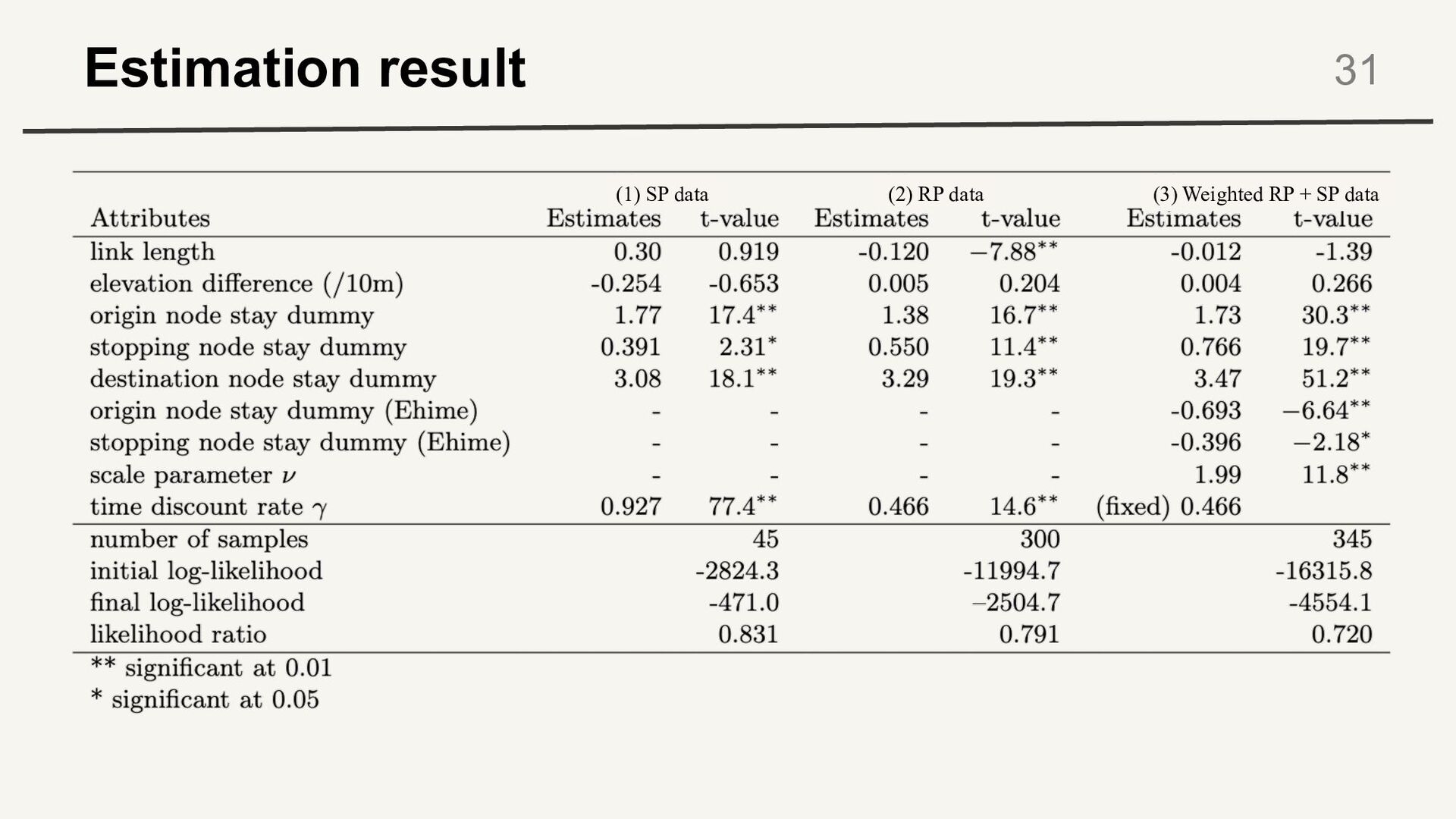
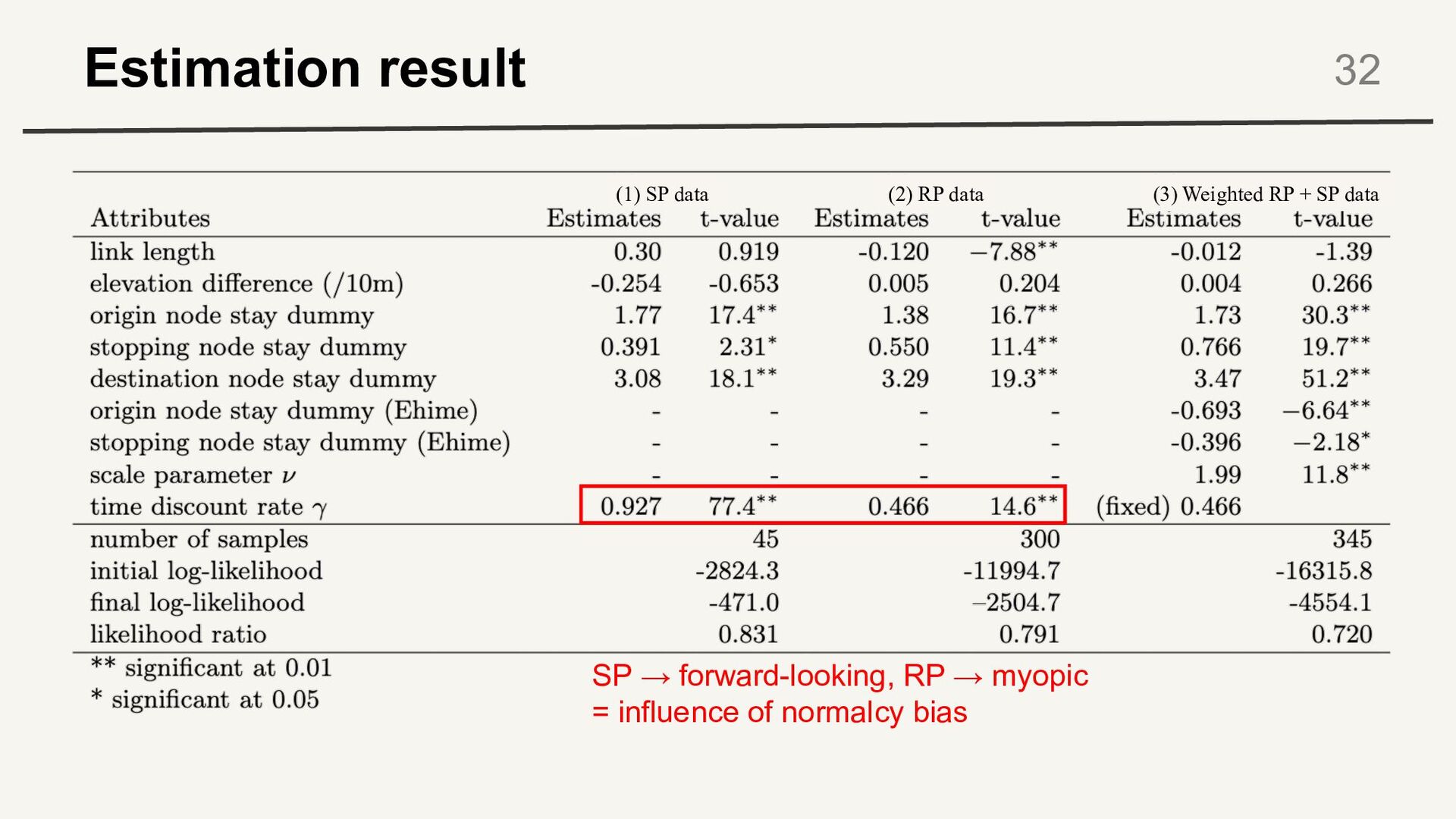
RP + SP data (4) Weighted RP + SP data (SP-specific) (SP-specific) link cost origin node stay dummy stopping node stay dummy destination node stay dummy RP model -0.5 1.0 1.0 3.0 SP model -0.5 0.5 0.5 3.0
RP + SP data (4) Weighted RP + SP data (SP-specific) (SP-specific) link cost origin node stay dummy stopping node stay dummy destination node stay dummy RP model -0.5 1.0 1.0 3.0 SP model -0.5 0.5 0.5 3.0 accuracy is improved! → correct non-response bias
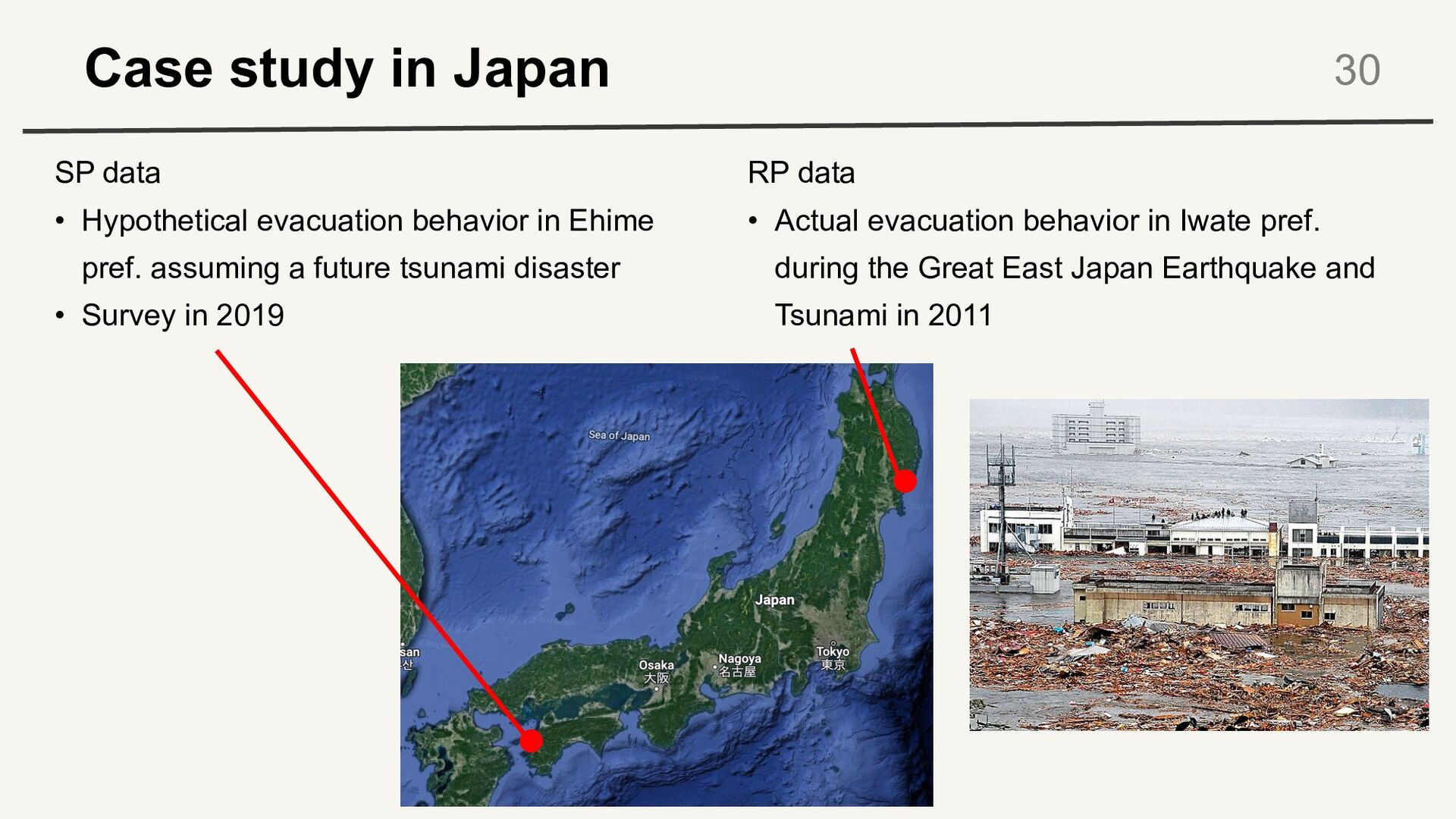
behavior in Iwate pref. during the Great East Japan Earthquake and Tsunami in 2011 SP data • Hypothetical evacuation behavior in Ehime pref. assuming a future tsunami disaster • Survey in 2019
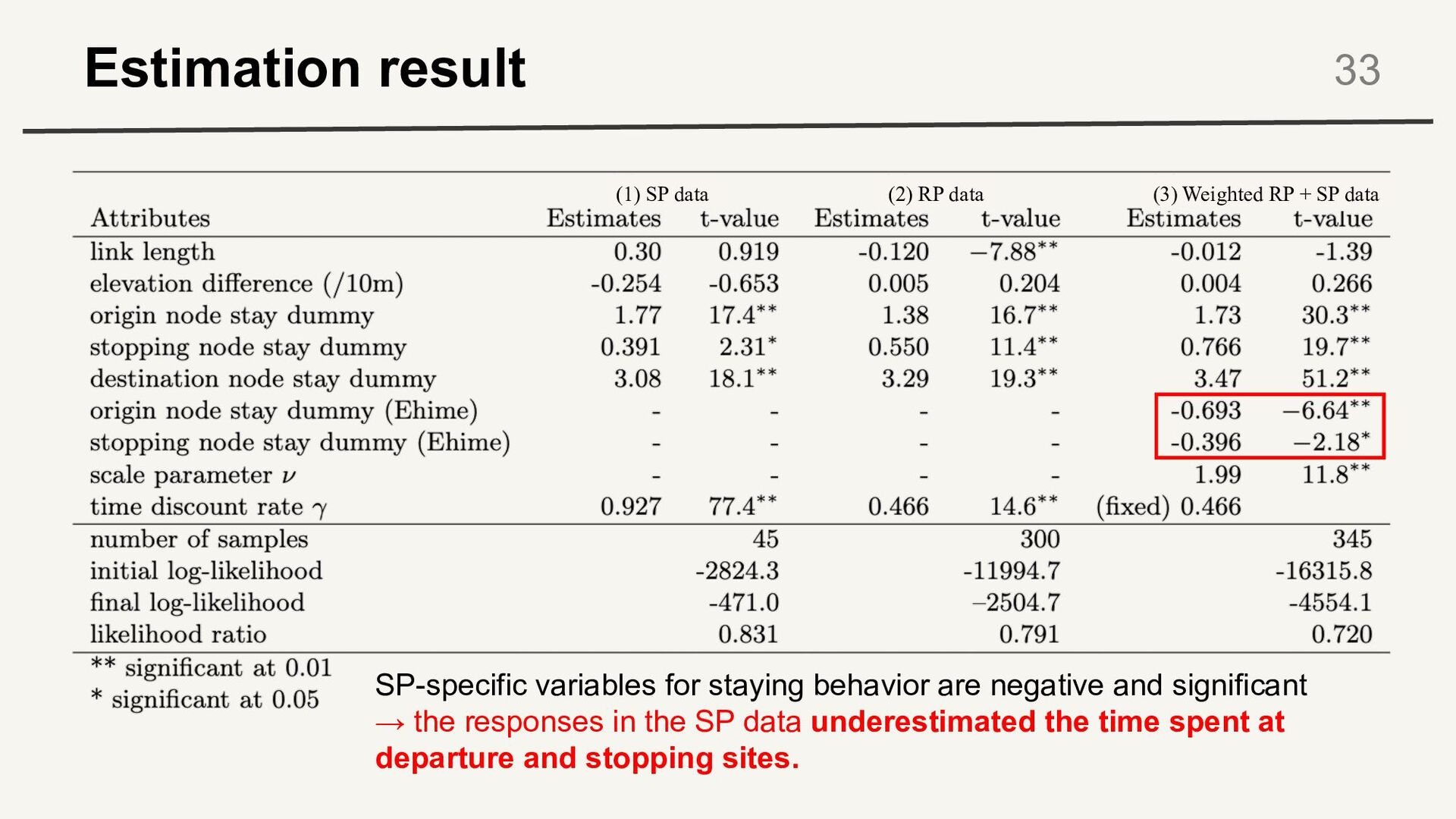
Weighted RP + SP data SP-specific variables for staying behavior are negative and significant → the responses in the SP data underestimated the time spent at departure and stopping sites.
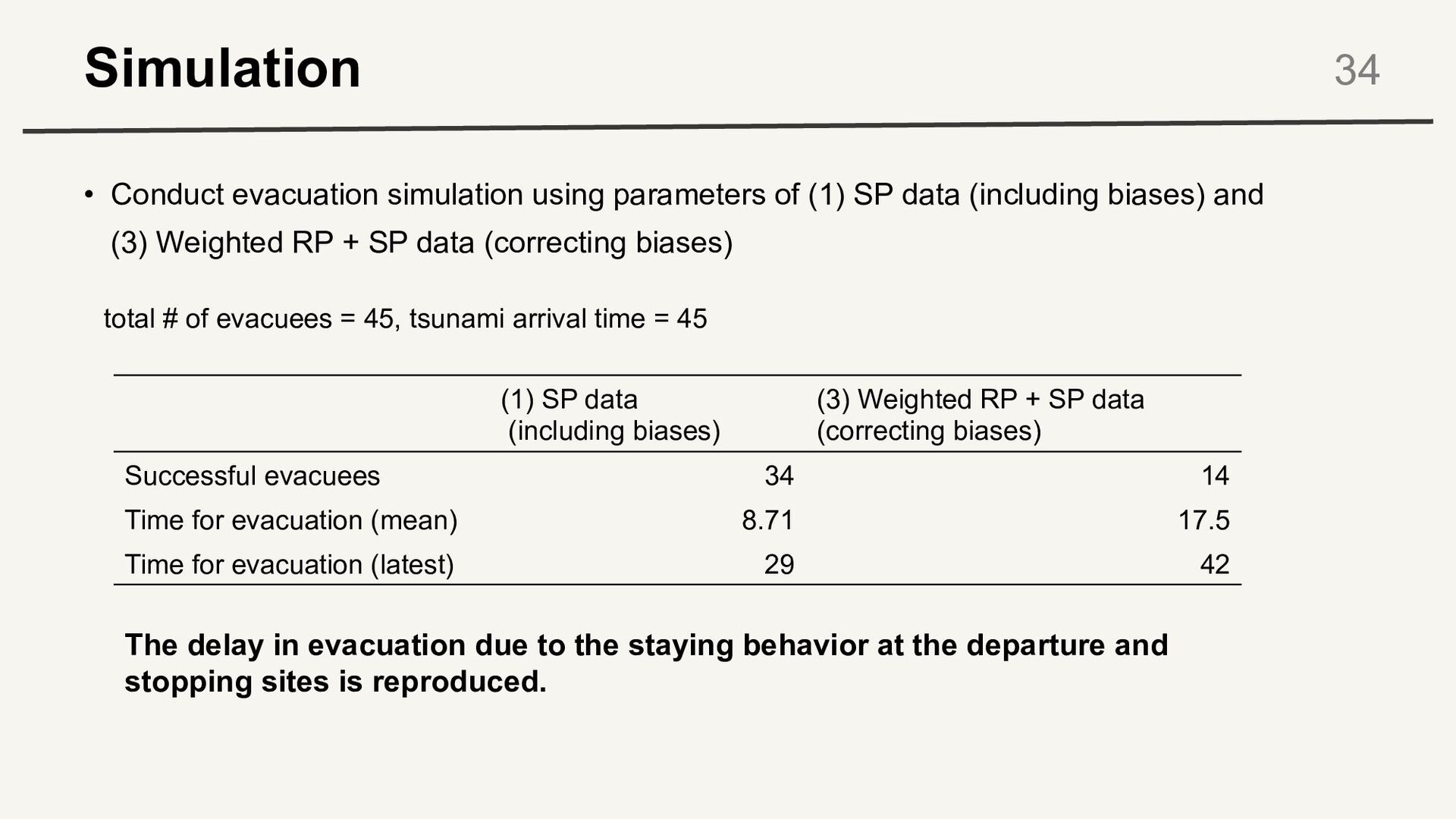
data (including biases) and (3) Weighted RP + SP data (correcting biases) 34 (1) SP data (including biases) (3) Weighted RP + SP data (correcting biases) Successful evacuees 34 14 Time for evacuation (mean) 8.71 17.5 Time for evacuation (latest) 29 42 total # of evacuees = 45, tsunami arrival time = 45 The delay in evacuation due to the staying behavior at the departure and stopping sites is reproduced.
time / destination/ route choice ü Need for dynamic decision-making during disaster. Model estimation ü Non-response bias and normalcy bias of RP / SP data are corrected. A dynamic activity scheduling model for evacuation A weighted RP/SP combined estimation method This method is useful - for developing appropriate evacuation plans. - for any travel behavior data influenced by missing data and SP-specific bias.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![36 Thank you for listening! Contact: [email protected]](https://files.speakerdeck.com/presentations/60b293780d7944aead595f3695341713/slide_35.jpg){kind=link}