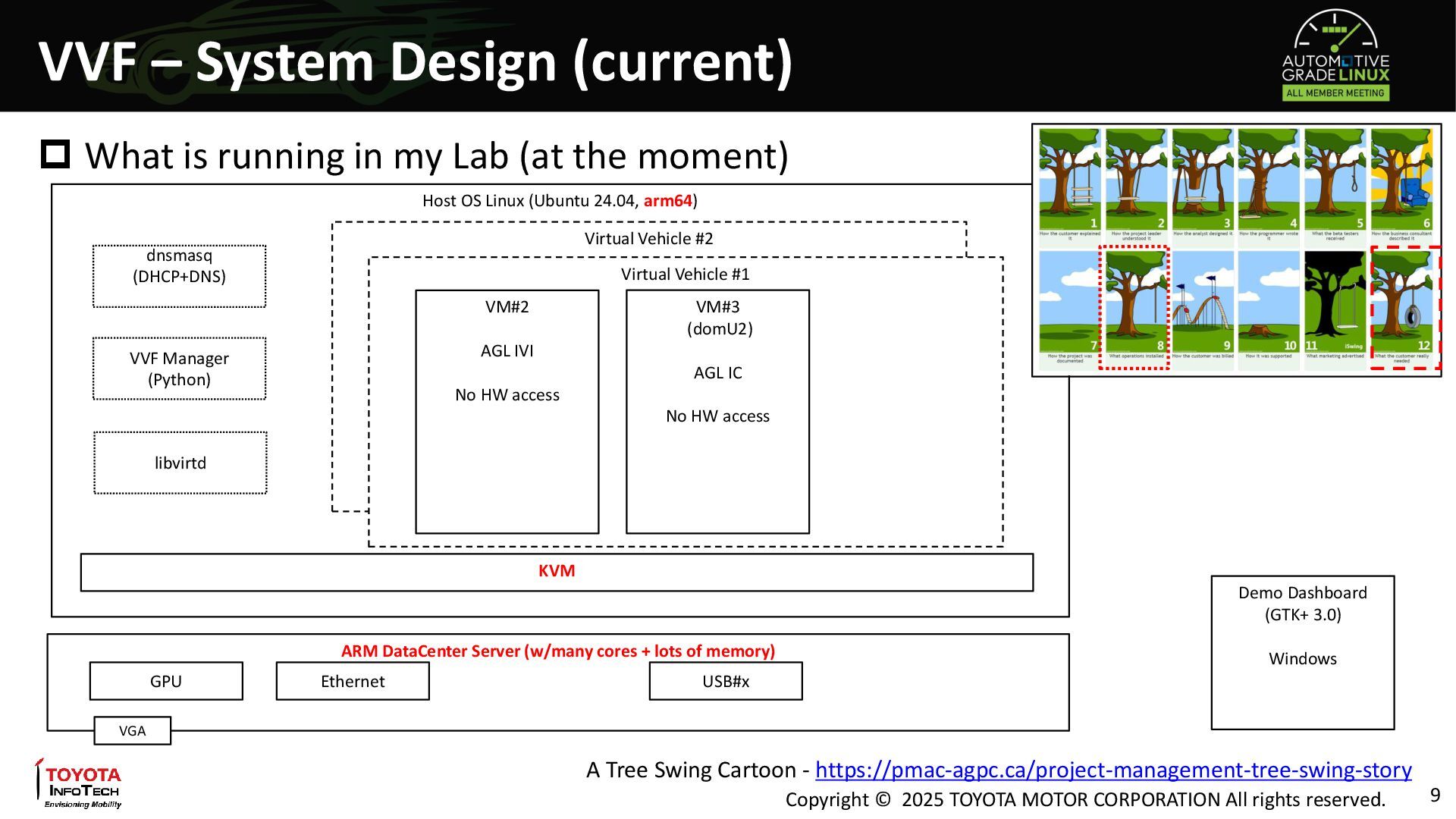
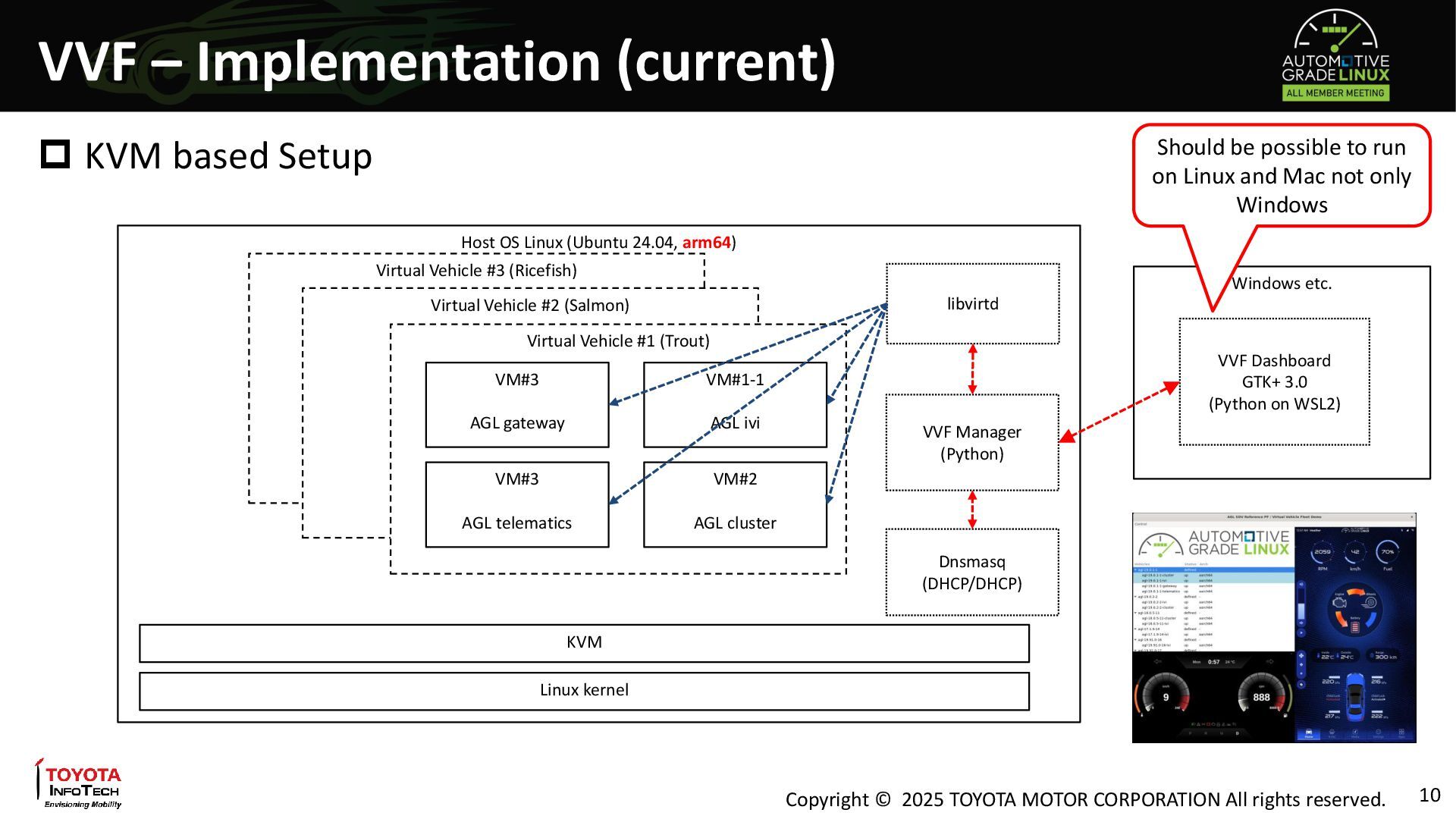
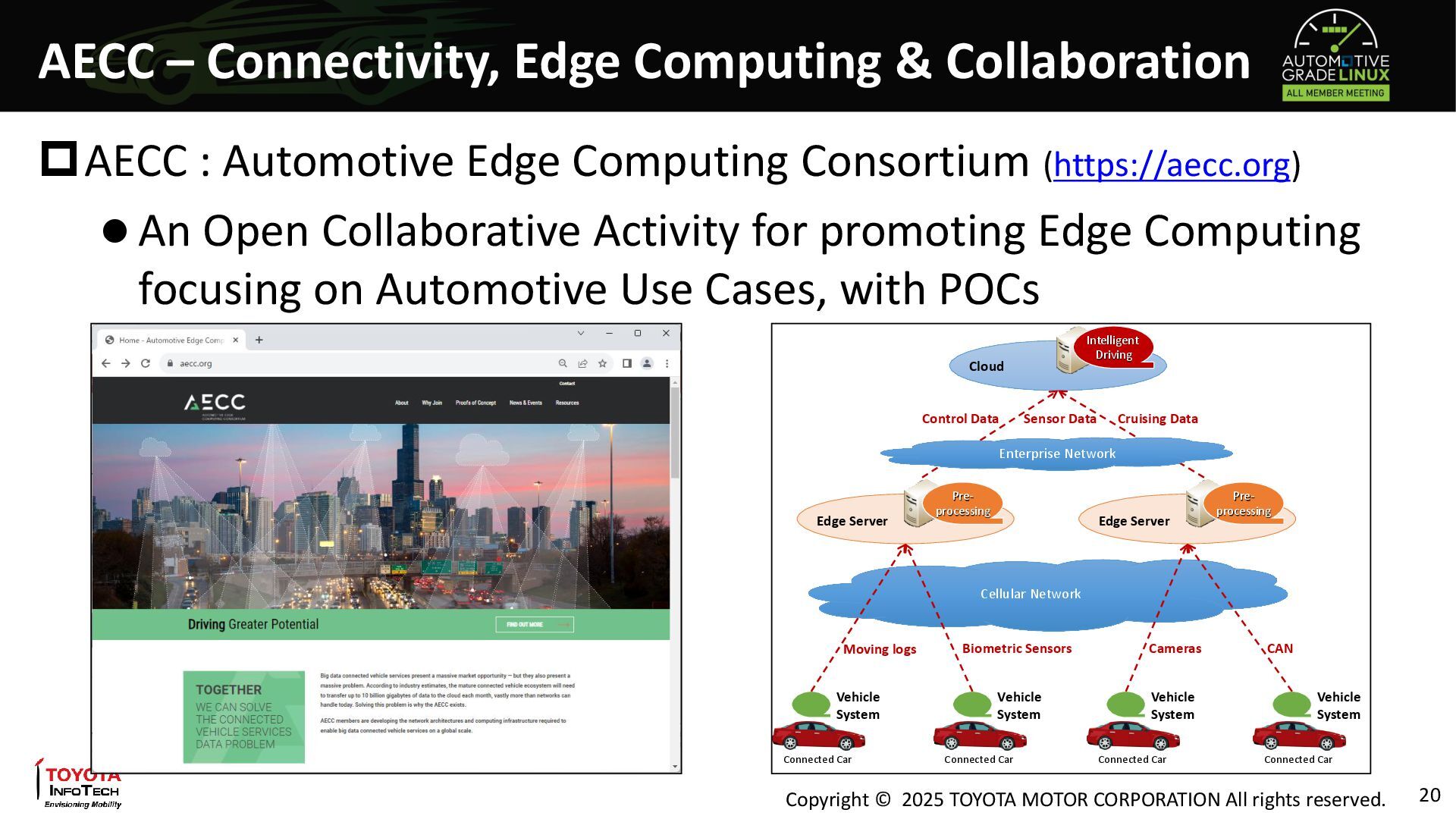
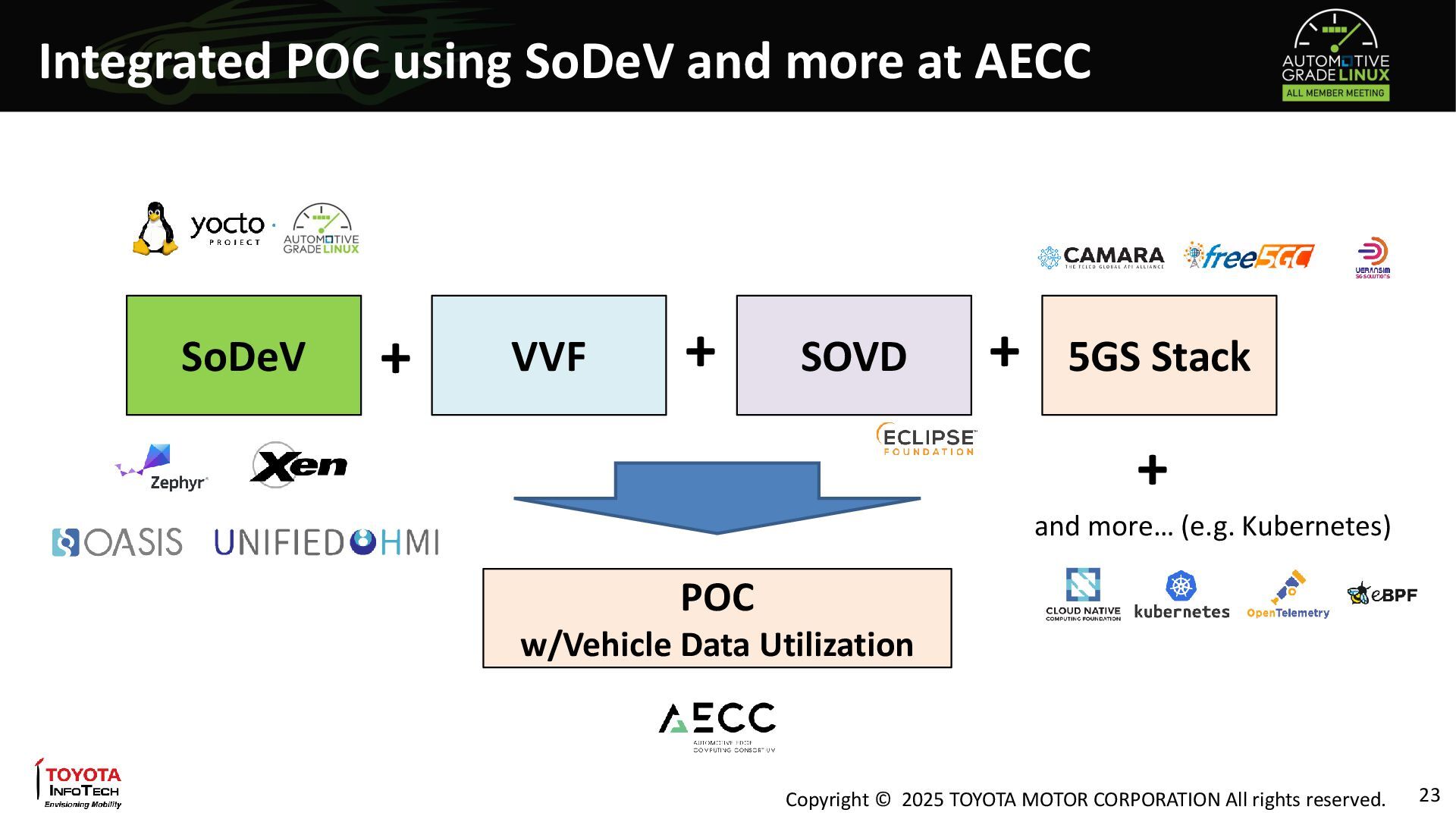
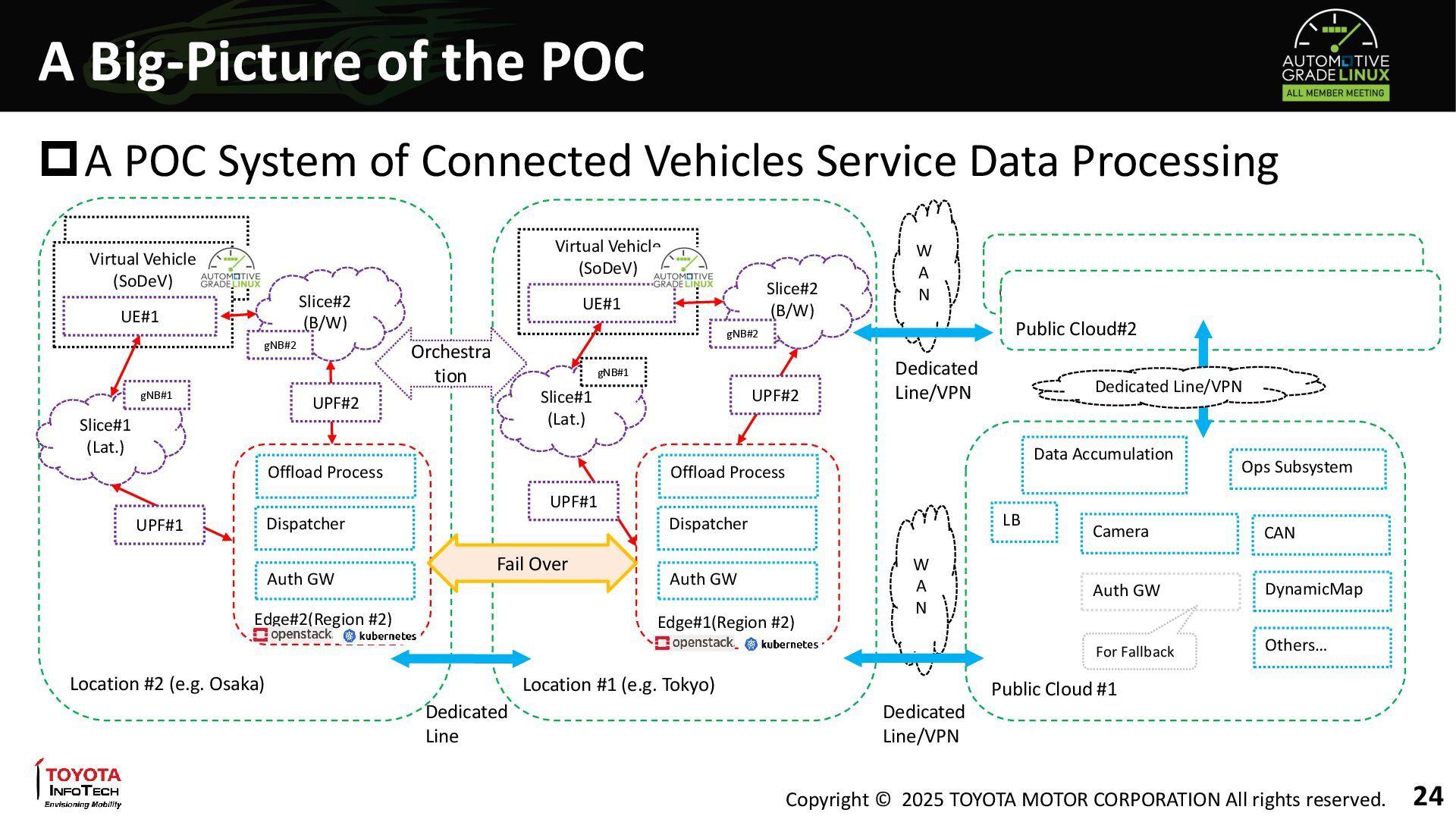
This presentation will provide an update on the Virtual Vehicle Fleet introduced at the AMM Spring in February. This time, we will demonstrate a virtual vehicle composed of three virtual machines: IVI, IC, and GW, incorporating the technical elements currently under consideration for the AGL SDV Reference Platform. We will delve into the complete architecture of a vehicle data processing system that spans from the vehicle to the cellular network, edge, core network, and cloud, using this virtual vehicle fleet. Additionally, we will explore the integration with a simulated 5G network (5GNW). We will also discuss the relationship between edge processing and ongoing activities at AECC.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}