Single Pointcloud Snapshot ▪ In this study, we estimate trajectory of each point
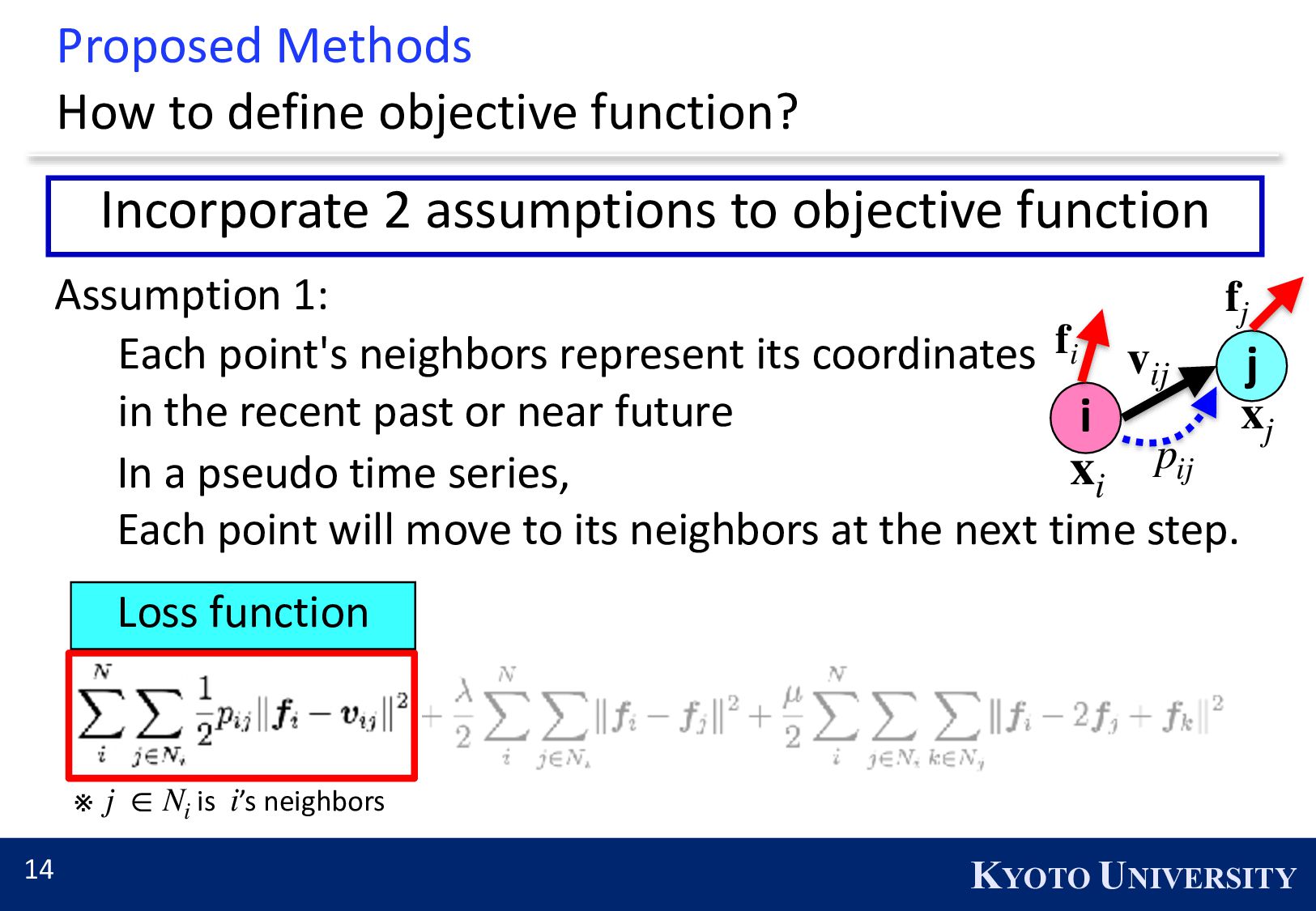
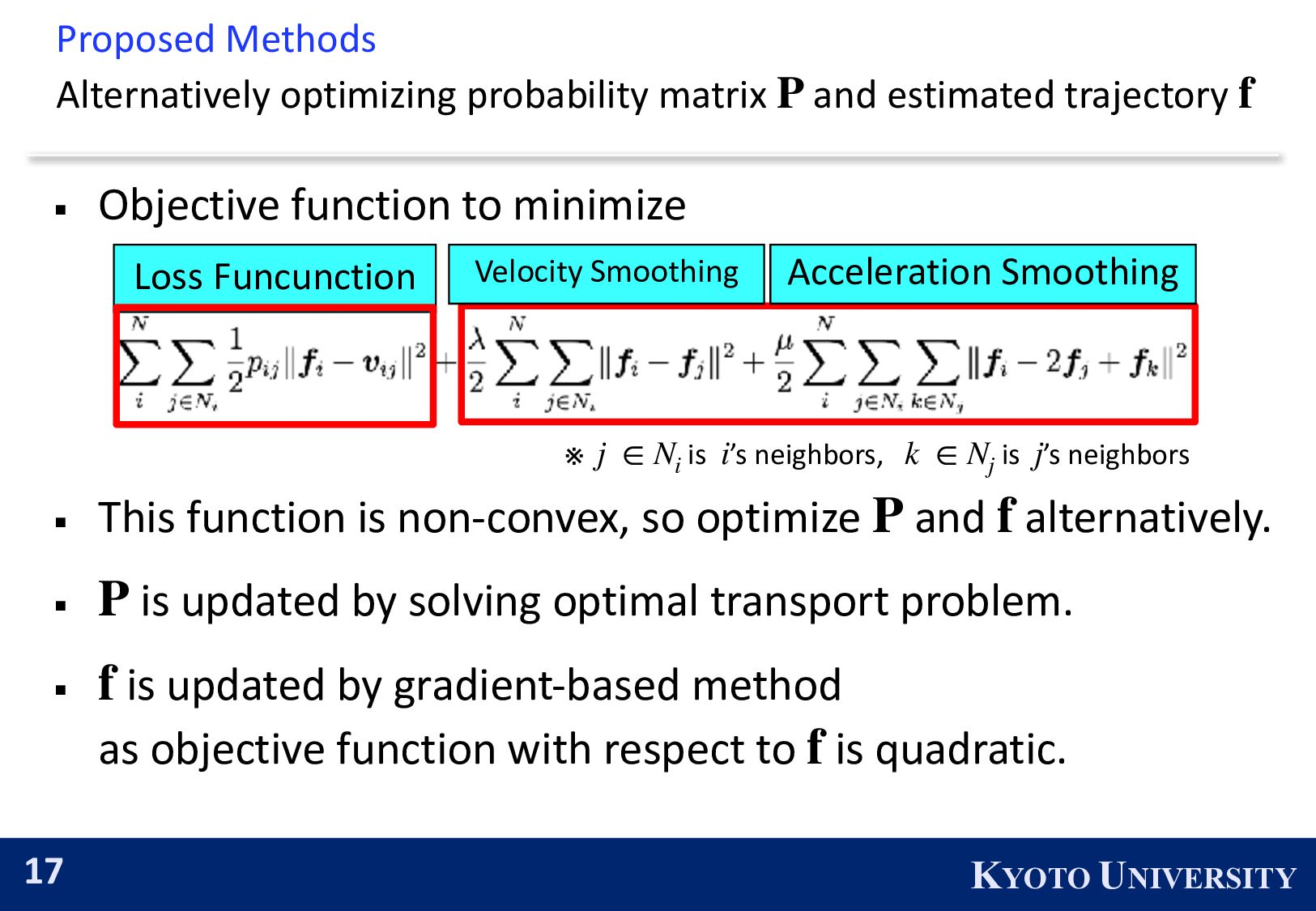
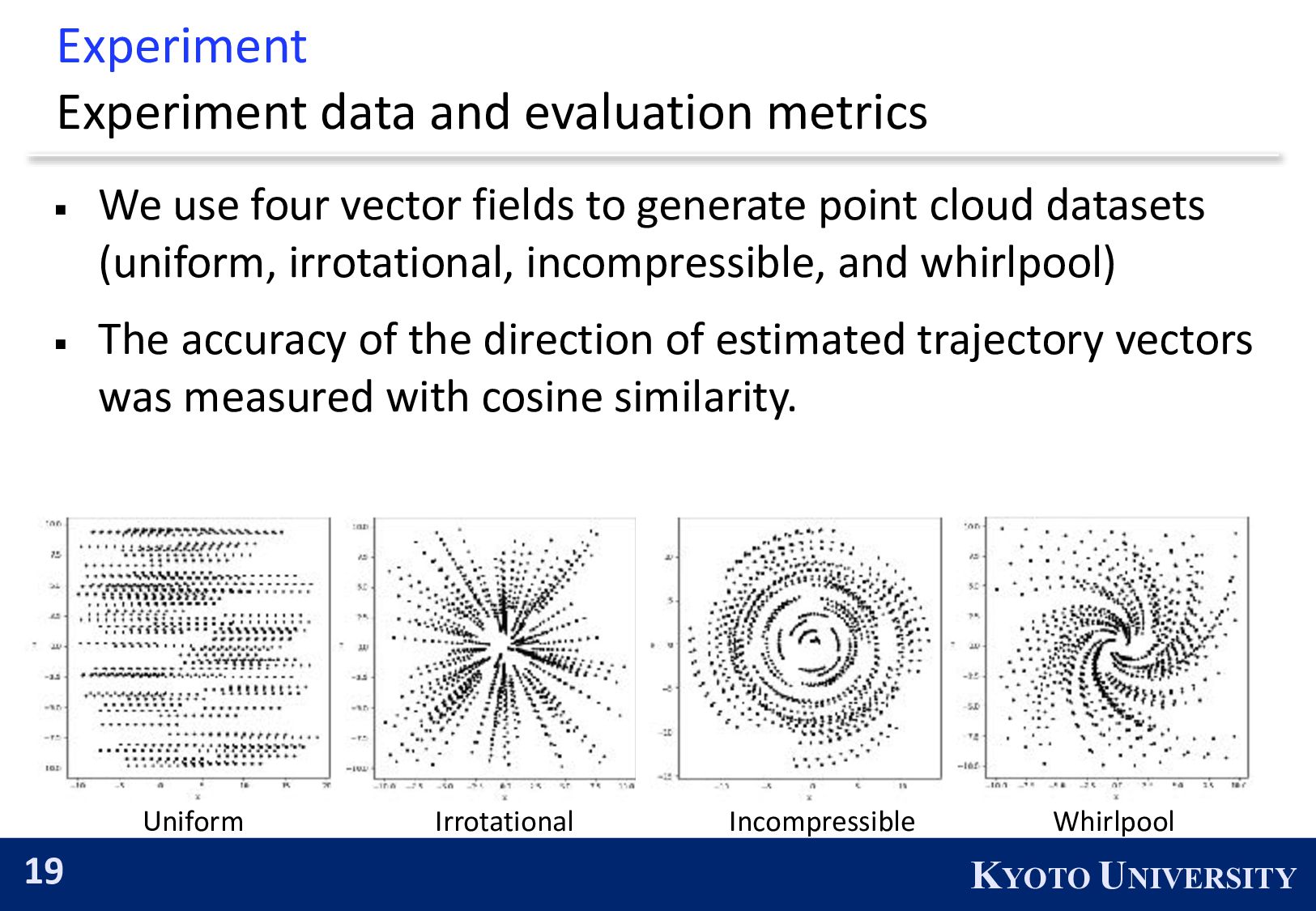
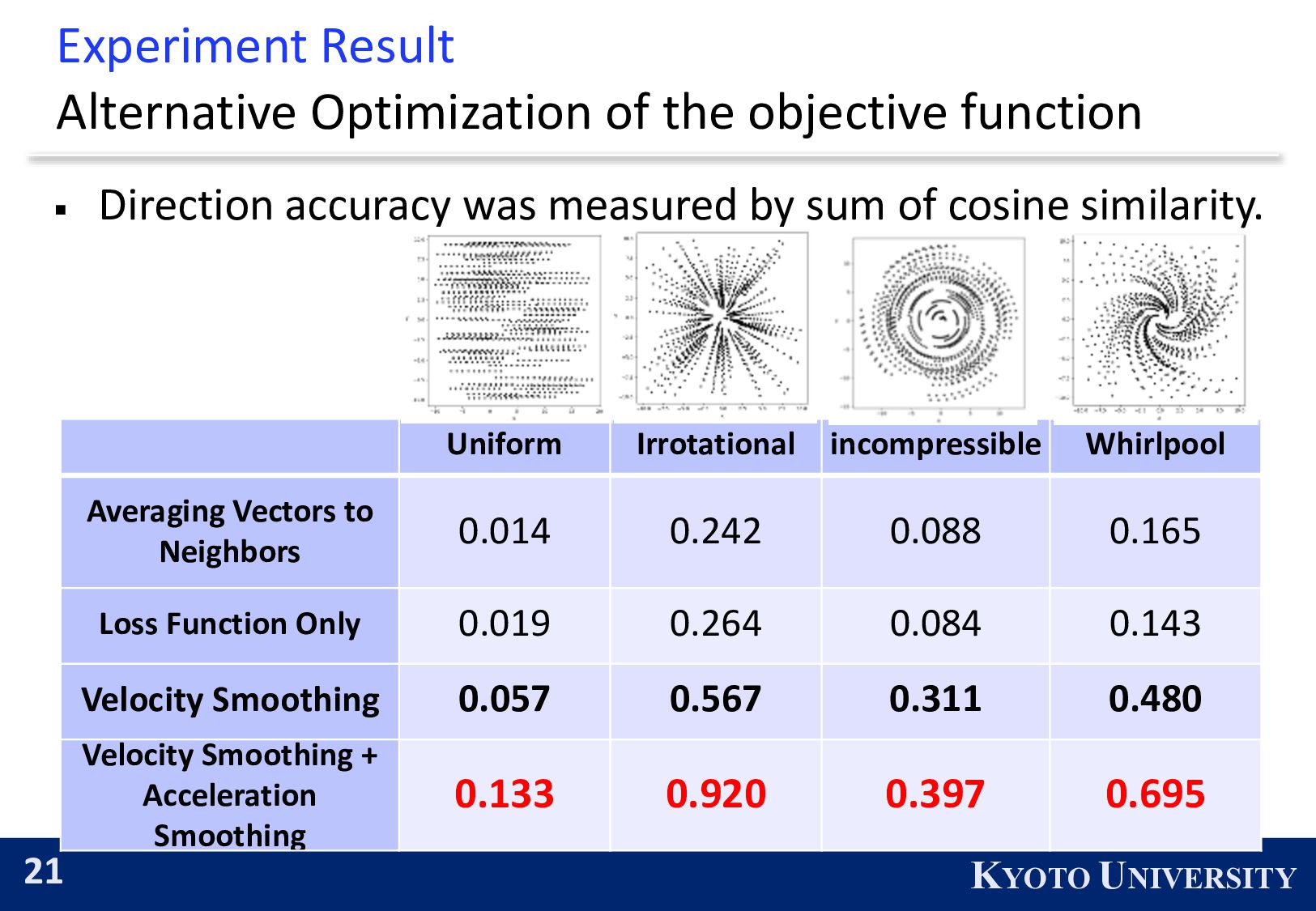
from a point cloud data with only coordinates at a single time. In other words, the motion of each point was restored from the coordinates of the motionless point cloud. ▪ In this research, we proposed a formulation of the problem set and devised an algorithm to solve it at the same time. ▪ Experimental results showed that two types of regularization terms, velocity smoothing and acceleration smoothing, significantly improve the accuracy of the estimation.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}