is not a real number, but a decimal number expressed to a finite number of digits. Since the calculation is done with a finite number of digits, there is an error in the result. float intersect( vec3 org, vec3 dir);
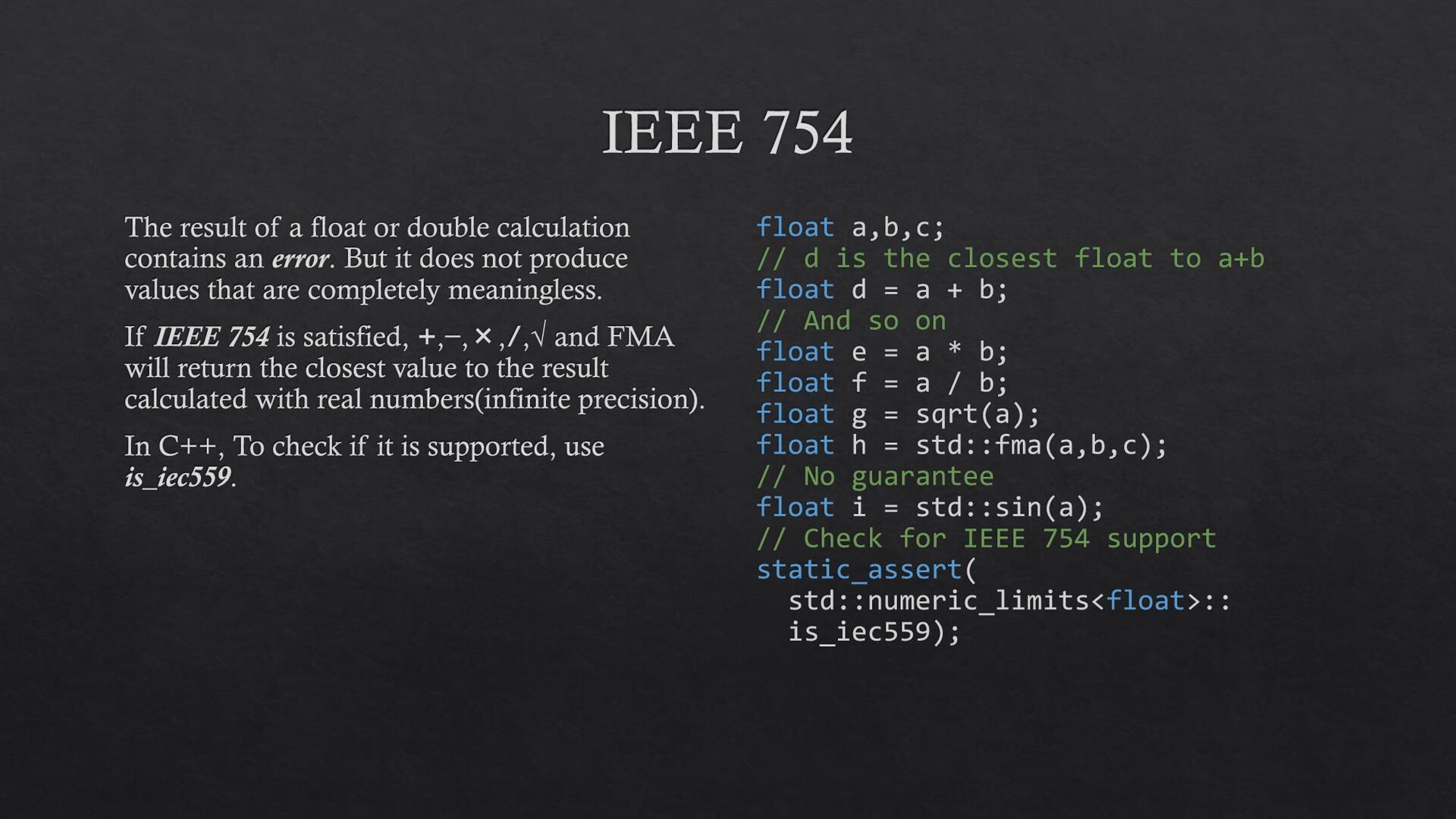
contains an error. But it does not produce values that are completely meaningless. If IEEE 754 is satisfied, +,−,×,/,√ and FMA will return the closest value to the result calculated with real numbers(infinite precision). In C++, To check if it is supported, use is_iec559. float a,b,c; // d is the closest float to a+b float d = a + b; // And so on float e = a * b; float f = a / b; float g = sqrt(a); float h = std::fma(a,b,c); // No guarantee float i = std::sin(a); // Check for IEEE 754 support static_assert( std::numeric_limits<float>:: is_iec559);
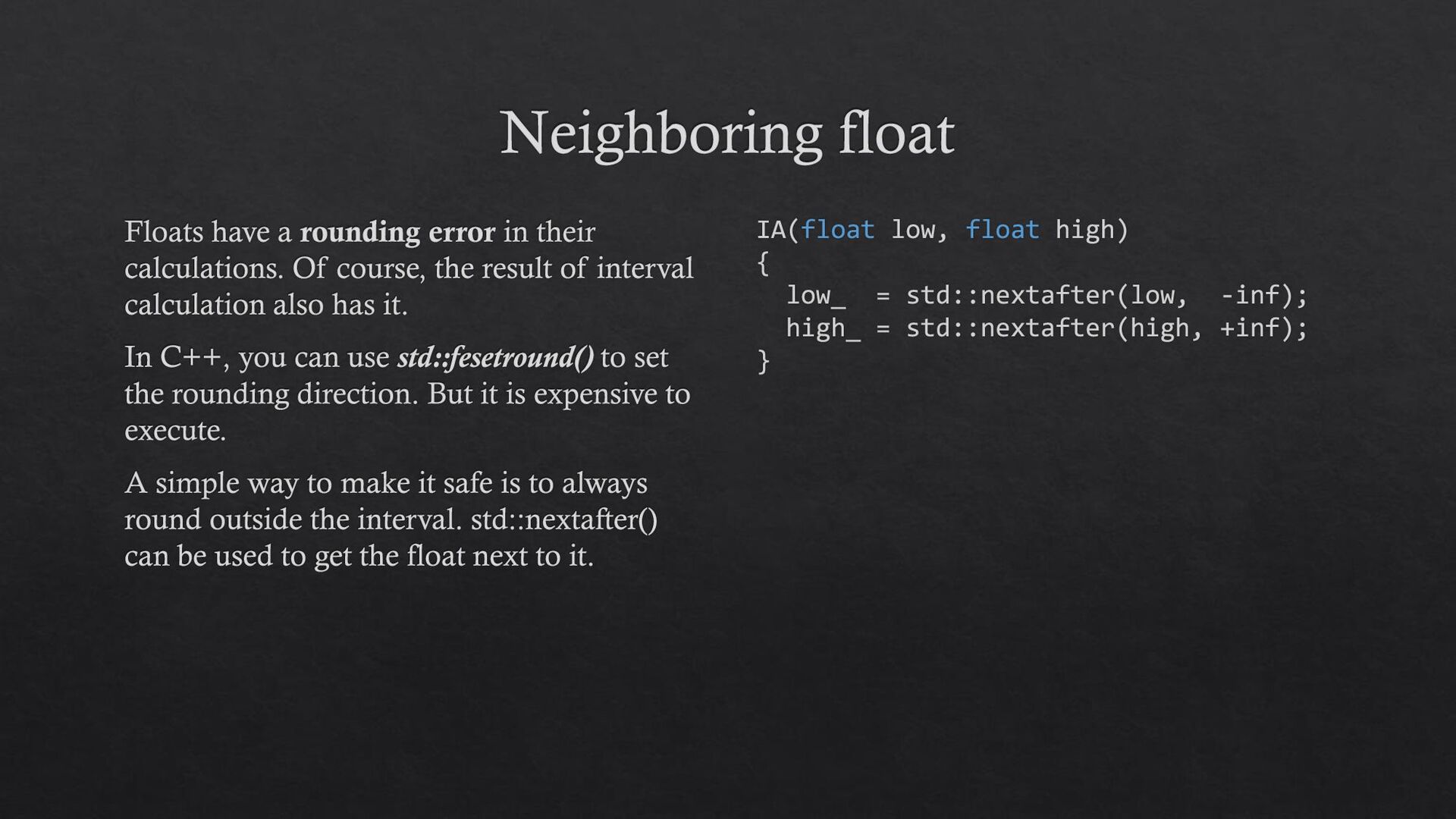
Of course, the result of interval calculation also has it. In C++, you can use std::fesetround() to set the rounding direction. But it is expensive to execute. A simple way to make it safe is to always round outside the interval. std::nextafter() can be used to get the float next to it. IA(float low, float high) { low_ = std::nextafter(low, -inf); high_ = std::nextafter(high, +inf); }
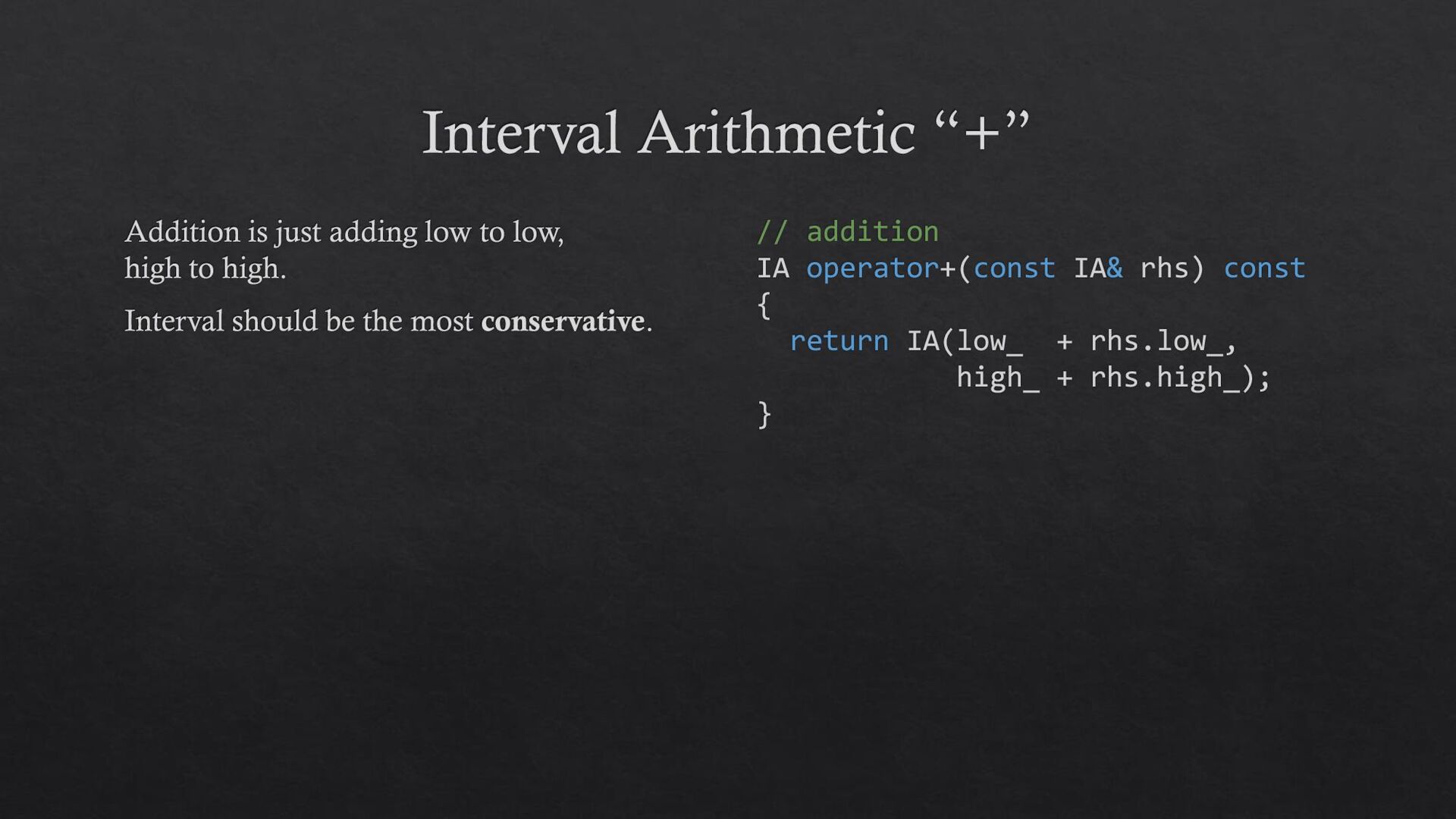
high to high. Interval should be the most conservative. // addition IA operator+(const IA& rhs) const { return IA(low_ + rhs.low_, high_ + rhs.high_); }
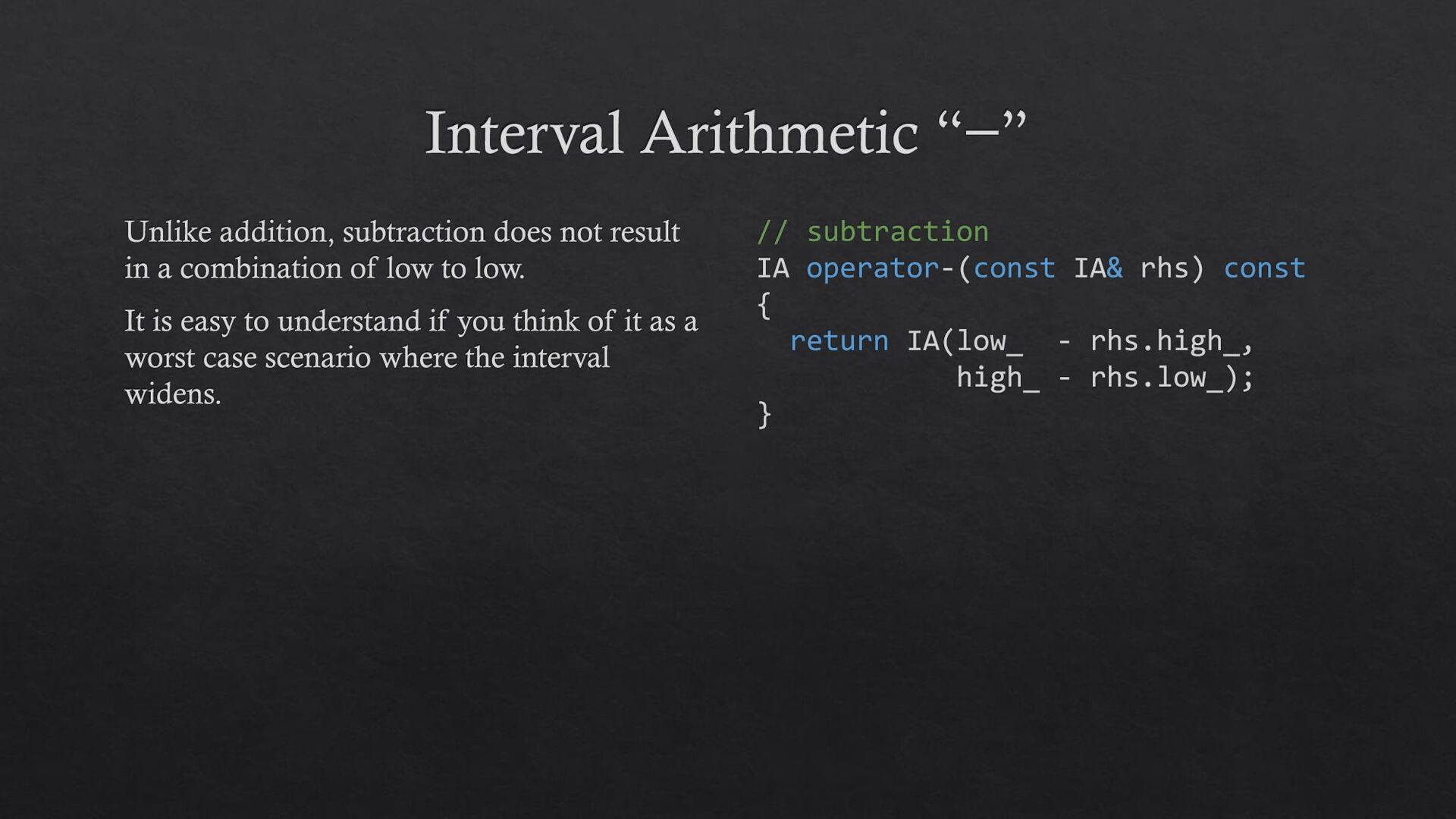
a combination of low to low. It is easy to understand if you think of it as a worst case scenario where the interval widens. // subtraction IA operator-(const IA& rhs) const { return IA(low_ - rhs.high_, high_ - rhs.low_); }
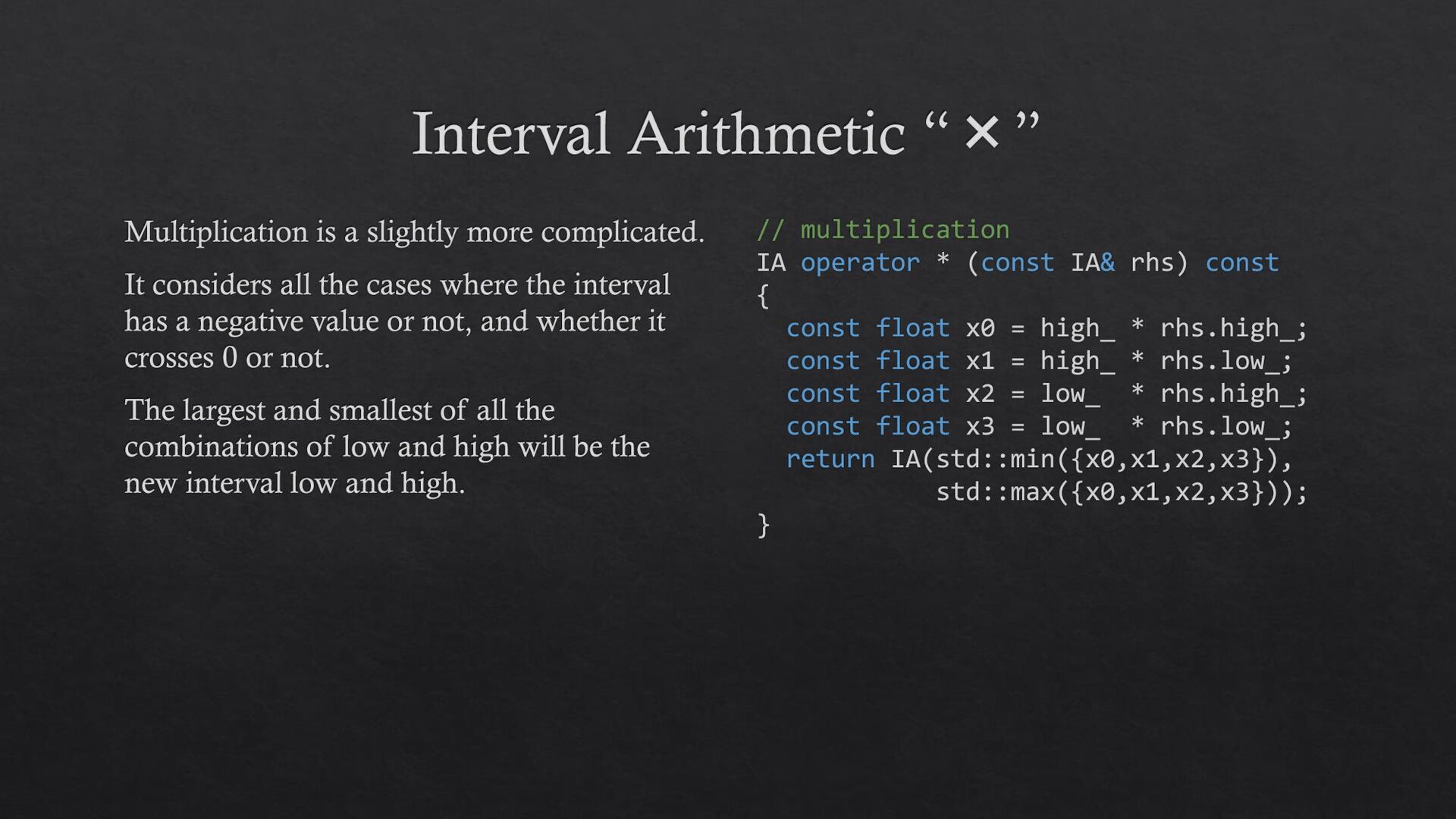
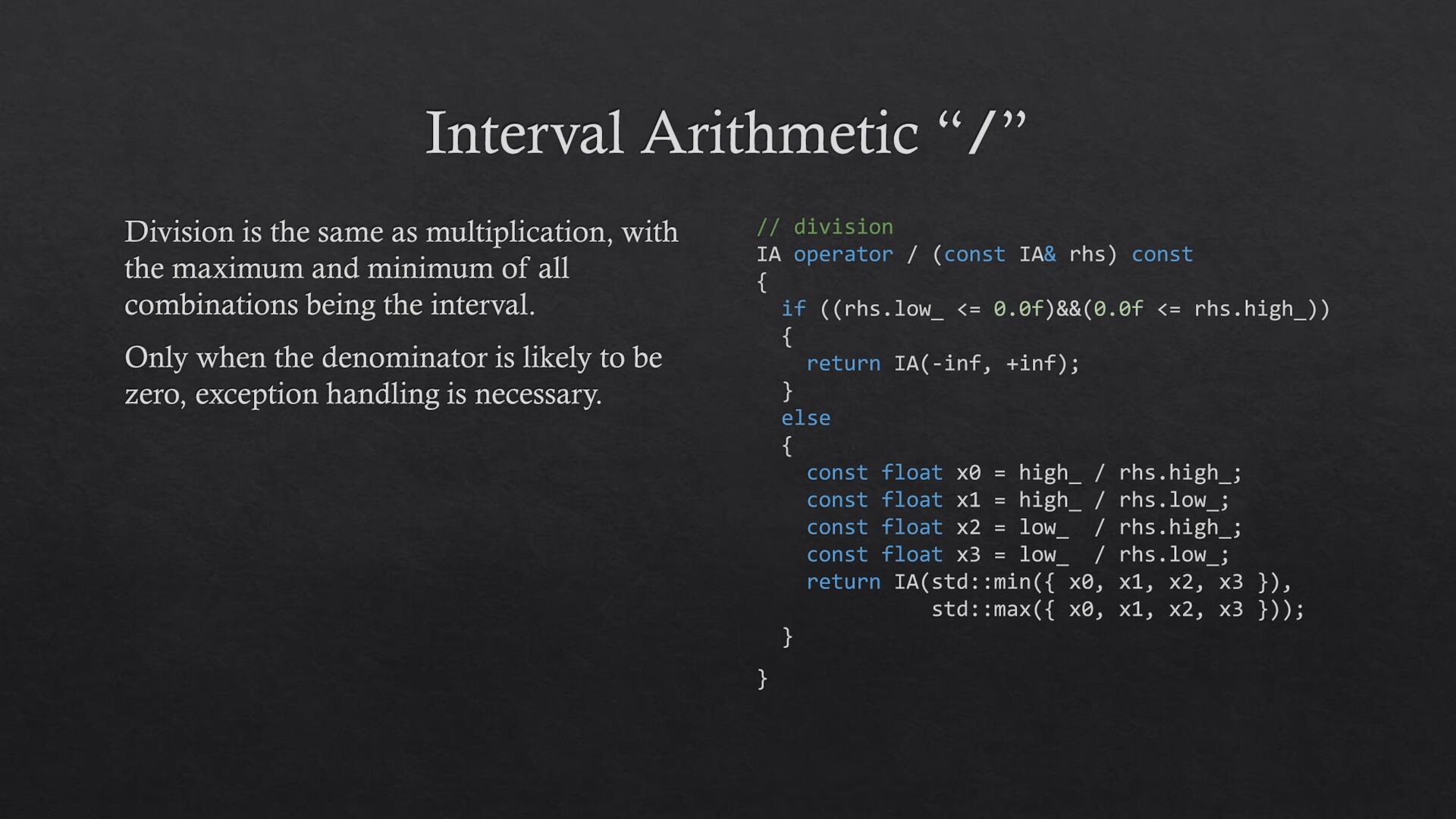
considers all the cases where the interval has a negative value or not, and whether it crosses 0 or not. The largest and smallest of all the combinations of low and high will be the new interval low and high. // multiplication IA operator * (const IA& rhs) const { const float x0 = high_ * rhs.high_; const float x1 = high_ * rhs.low_; const float x2 = low_ * rhs.high_; const float x3 = low_ * rhs.low_; return IA(std::min({x0,x1,x2,x3}), std::max({x0,x1,x2,x3})); }
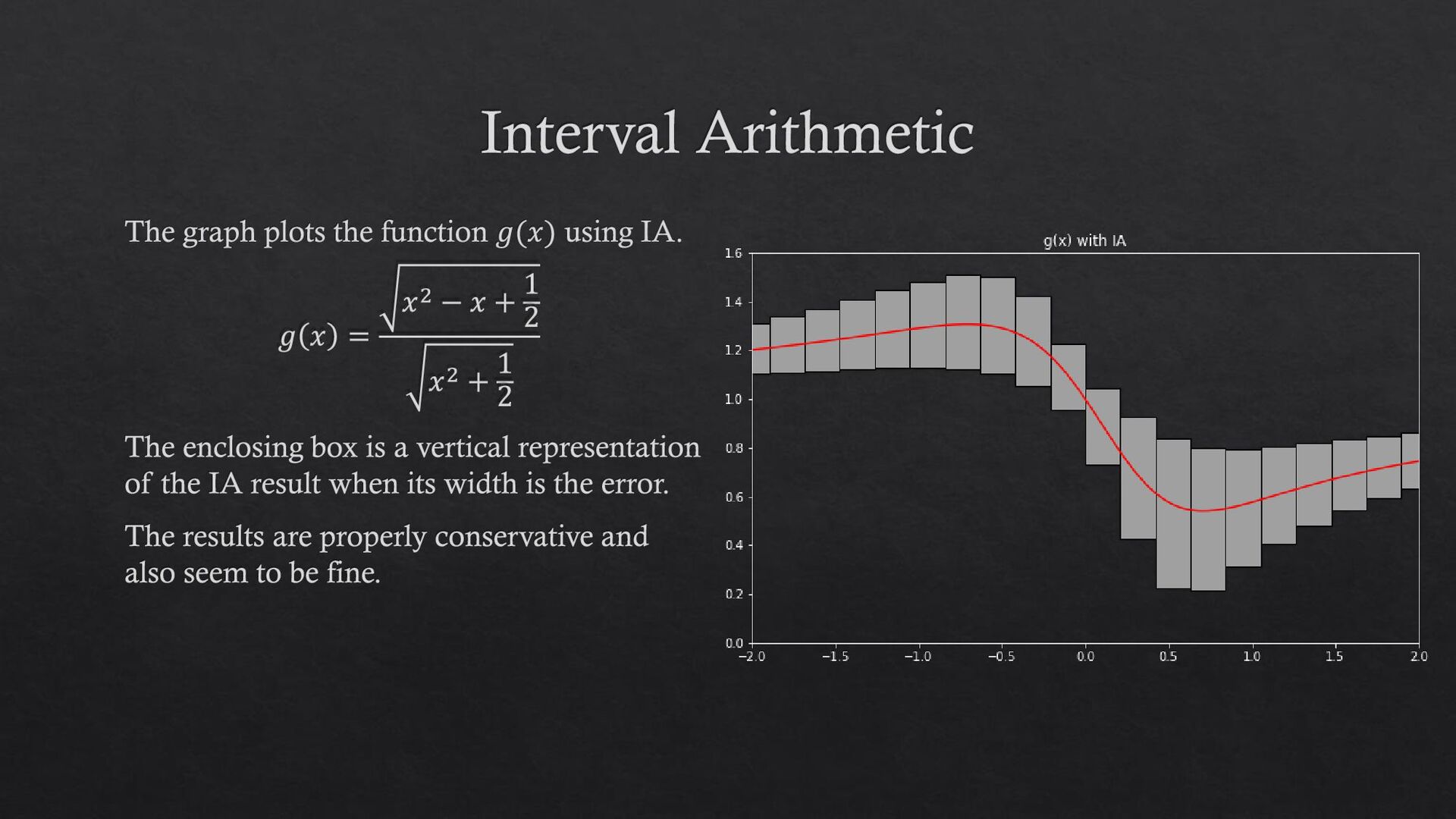
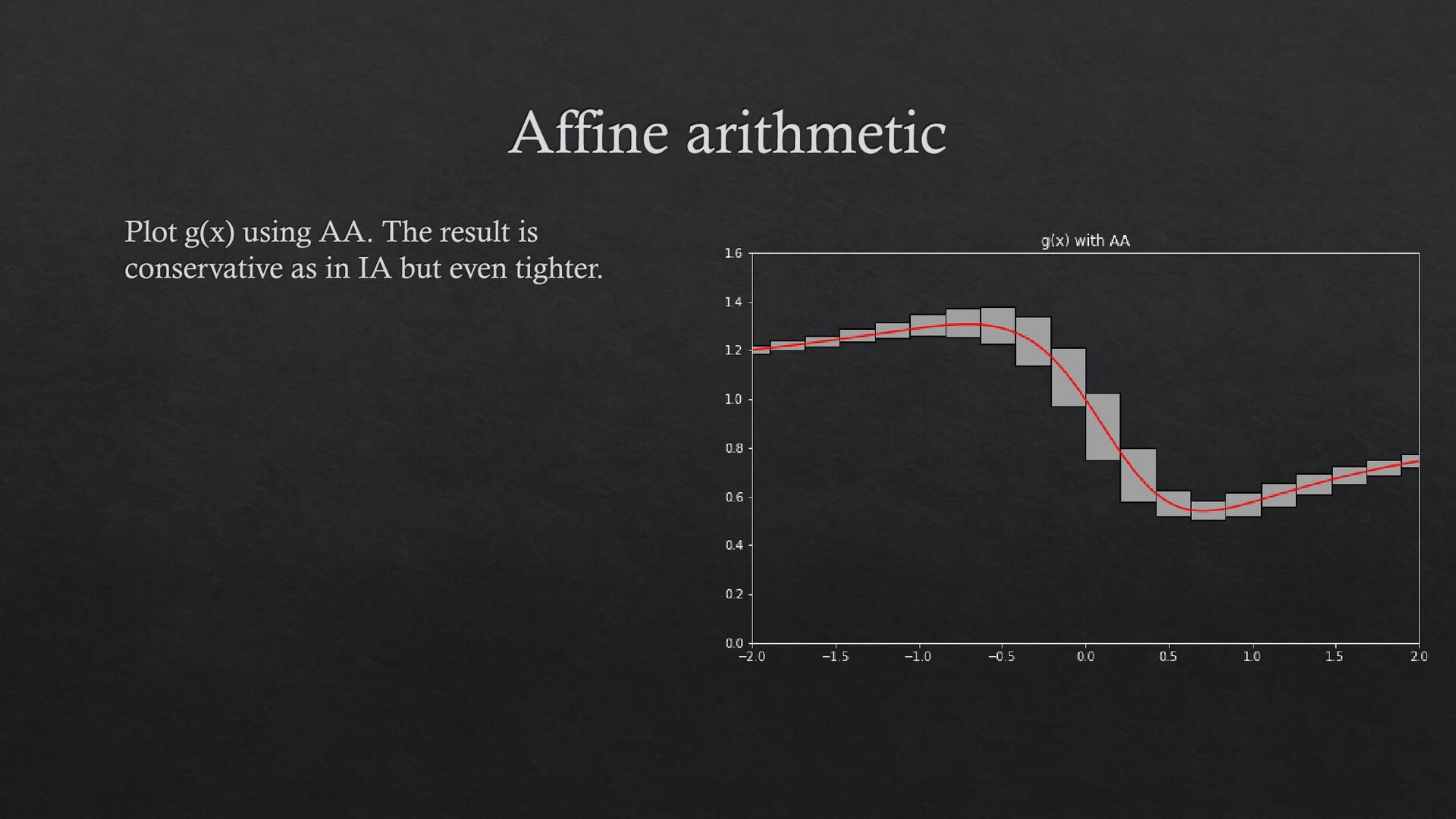
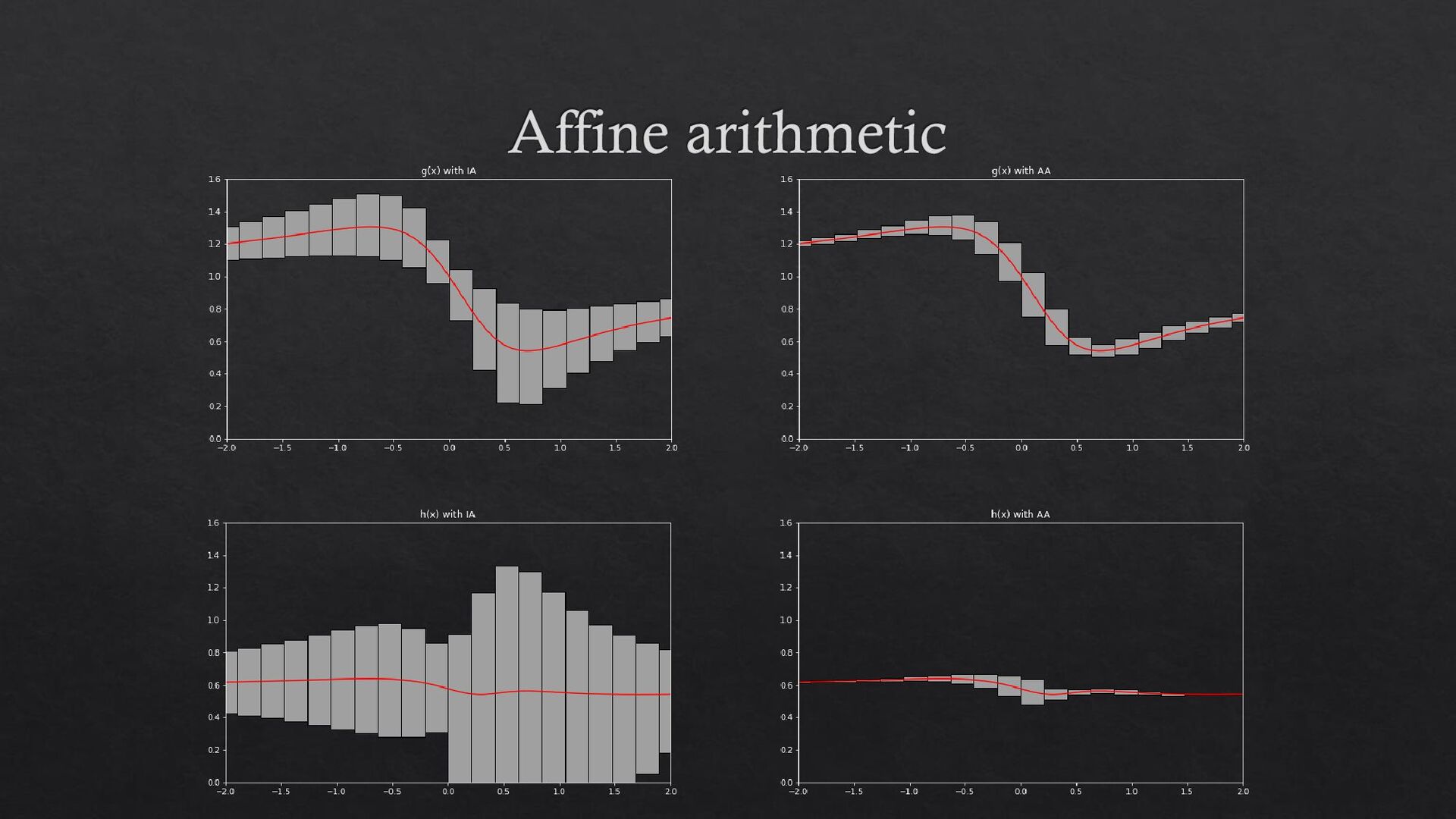
𝑔 𝑥 = 𝑥2 − 𝑥 + 1 2 𝑥2 + 1 2 The enclosing box is a vertical representation of the IA result when its width is the error. The results are properly conservative and also seem to be fine.
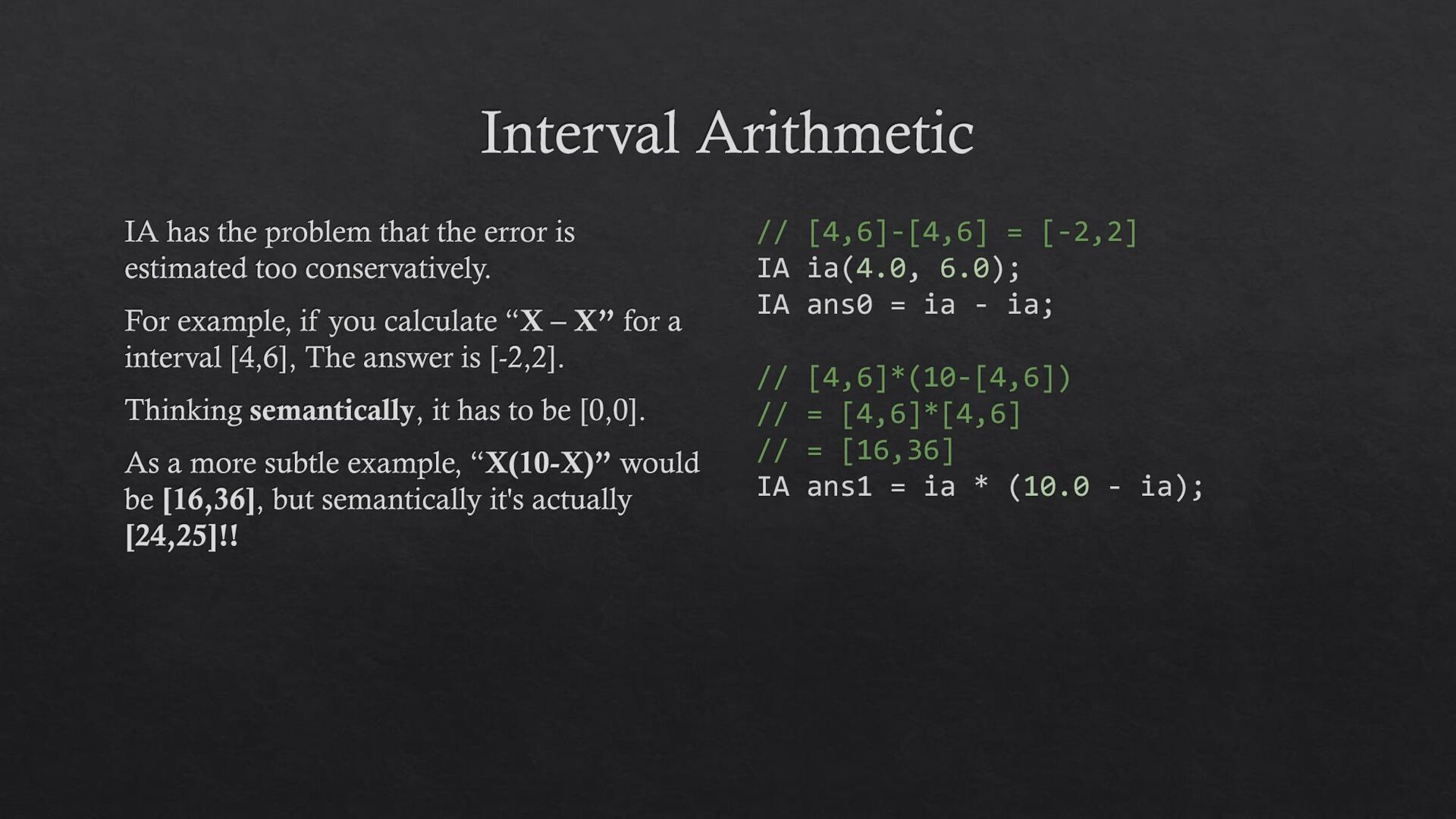
estimated too conservatively. For example, if you calculate “X – X” for a interval [4,6], The answer is [-2,2]. Thinking semantically, it has to be [0,0]. As a more subtle example, “X(10-X)” would be [16,36], but semantically it's actually [24,25]!! // [4,6]-[4,6] = [-2,2] IA ia(4.0, 6.0); IA ans0 = ia - ia; // [4,6]*(10-[4,6]) // = [4,6]*[4,6] // = [16,36] IA ans1 = ia * (10.0 - ia);
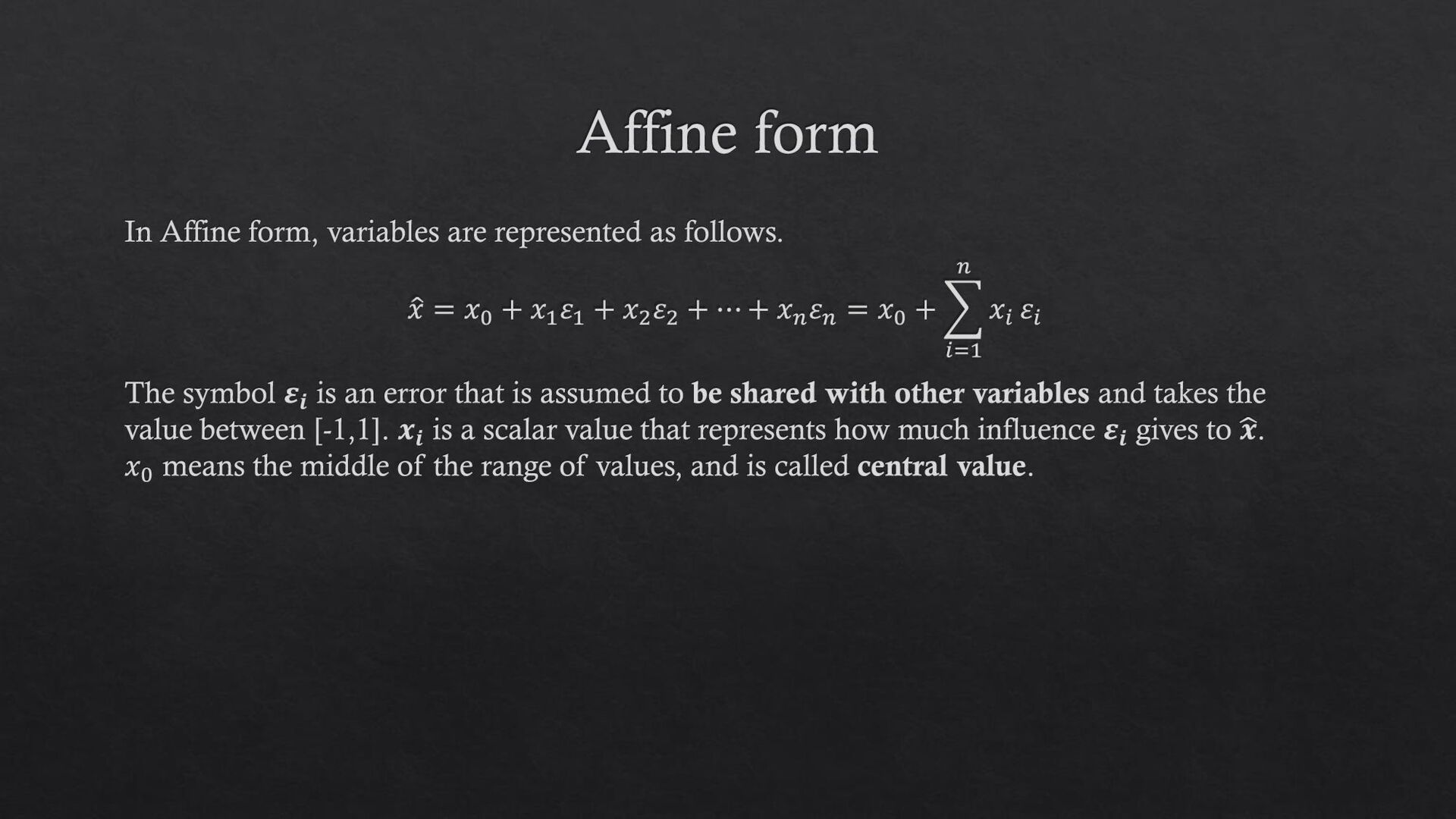
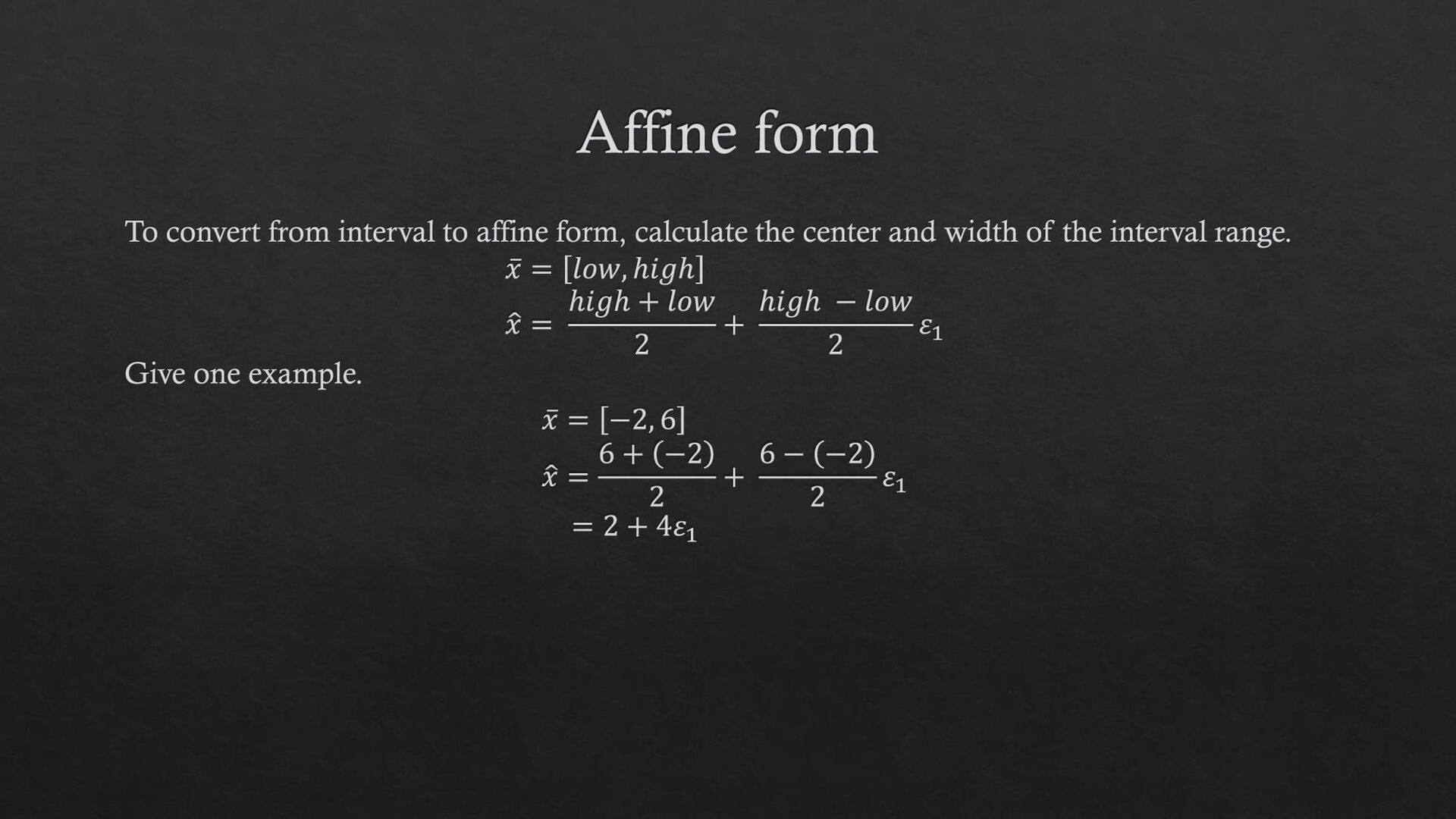
ො 𝑥 = 𝑥0 + 𝑥1 𝜀1 + 𝑥2 𝜀2 + ⋯ + 𝑥𝑛 𝜀𝑛 = 𝑥0 + 𝑖=1 𝑛 𝑥𝑖 𝜀𝑖 The symbol 𝜺𝒊 is an error that is assumed to be shared with other variables and takes the value between [-1,1]. 𝒙𝒊 is a scalar value that represents how much influence 𝜺𝒊 gives to ෝ 𝒙. 𝑥0 means the middle of the range of values, and is called central value.
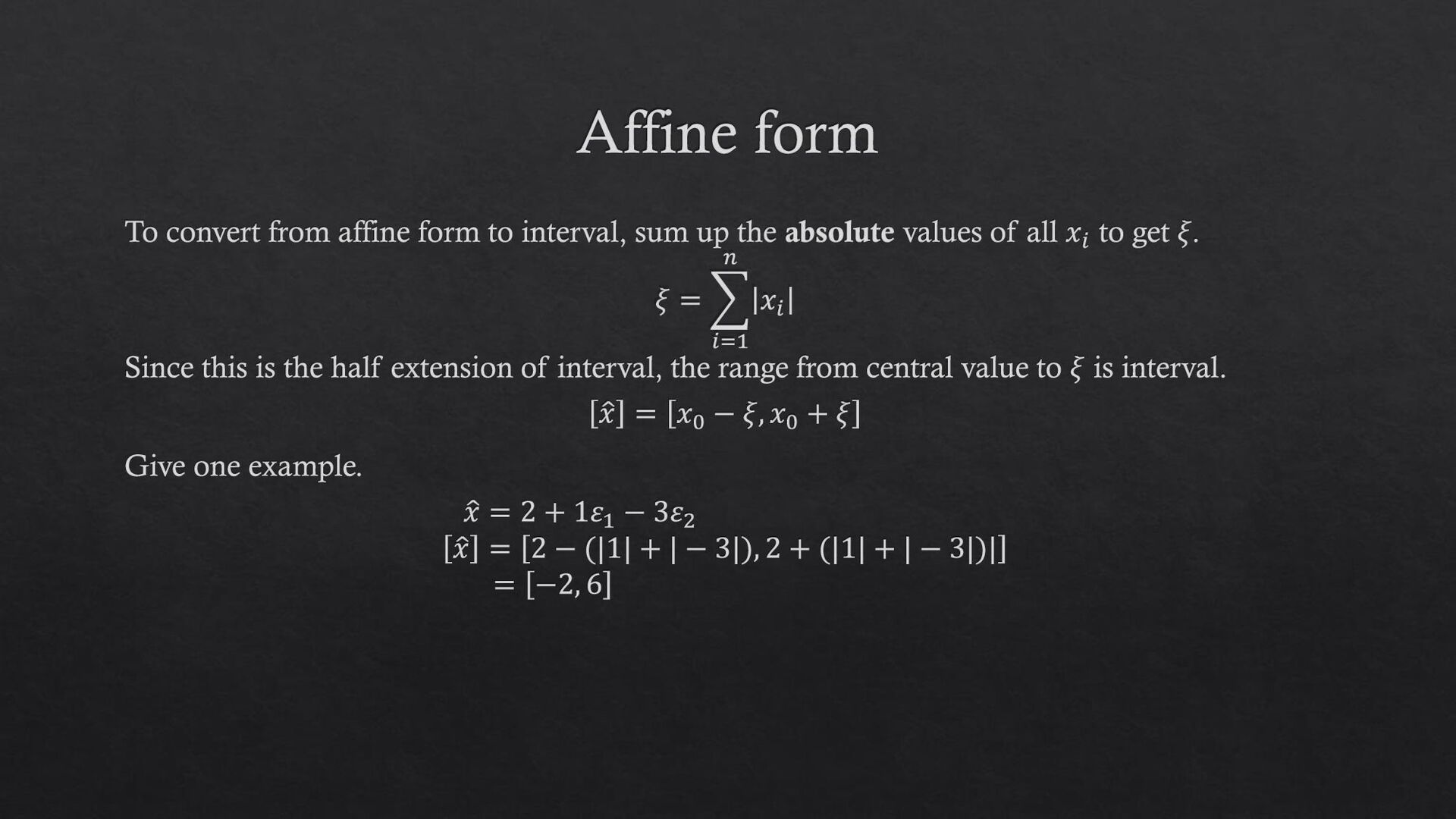
up the absolute values of all 𝑥𝑖 to get 𝜉. 𝜉 = 𝑖=1 𝑛 𝑥𝑖 Since this is the half extension of interval, the range from central value to 𝜉 is interval. ො 𝑥 = 𝑥0 − 𝜉, 𝑥0 + 𝜉 Give one example. ො 𝑥 = 2 + 1𝜀1 − 3𝜀2 ො 𝑥 = 2 − (|1| + | − 3|), 2 + (|1| + | − 3|)| = −2, 6
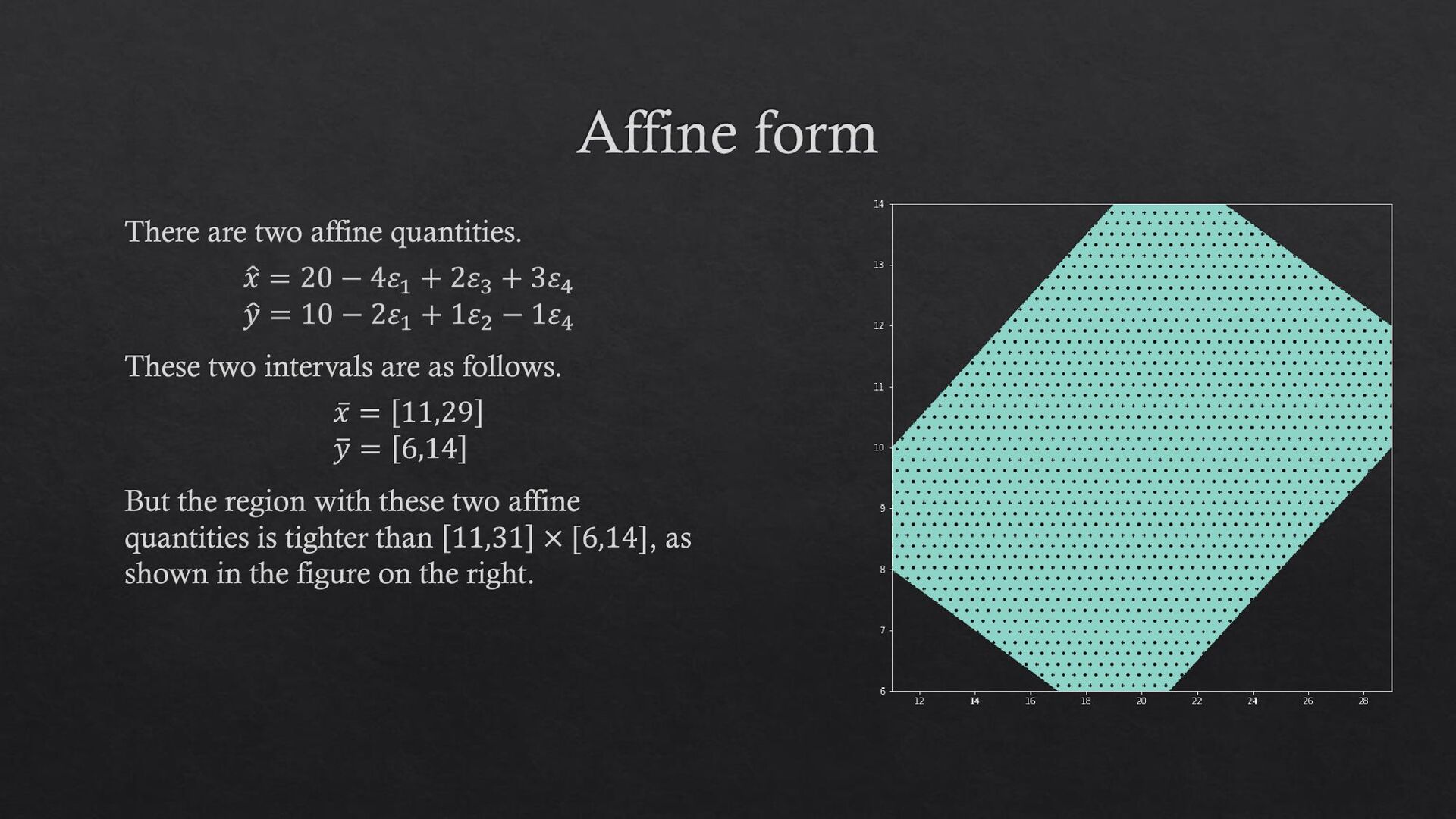
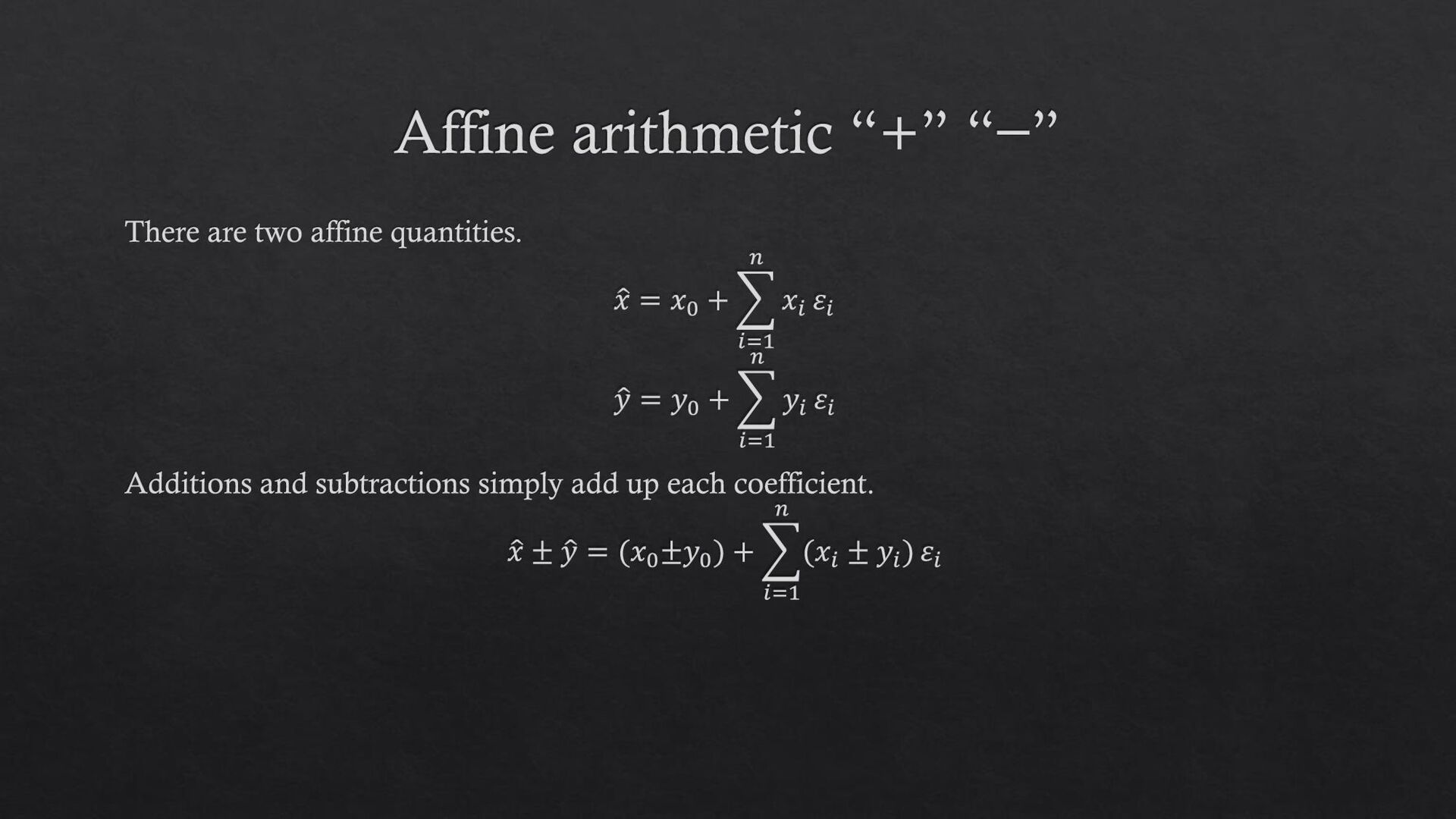
20 − 4𝜀1 + 2𝜀3 + 3𝜀4 ො 𝑦 = 10 − 2𝜀1 + 1𝜀2 − 1𝜀4 These two intervals are as follows. ҧ 𝑥 = 11,29 ത 𝑦 = 6,14 But the region with these two affine quantities is tighter than 11,31 × [6,14], as shown in the figure on the right.
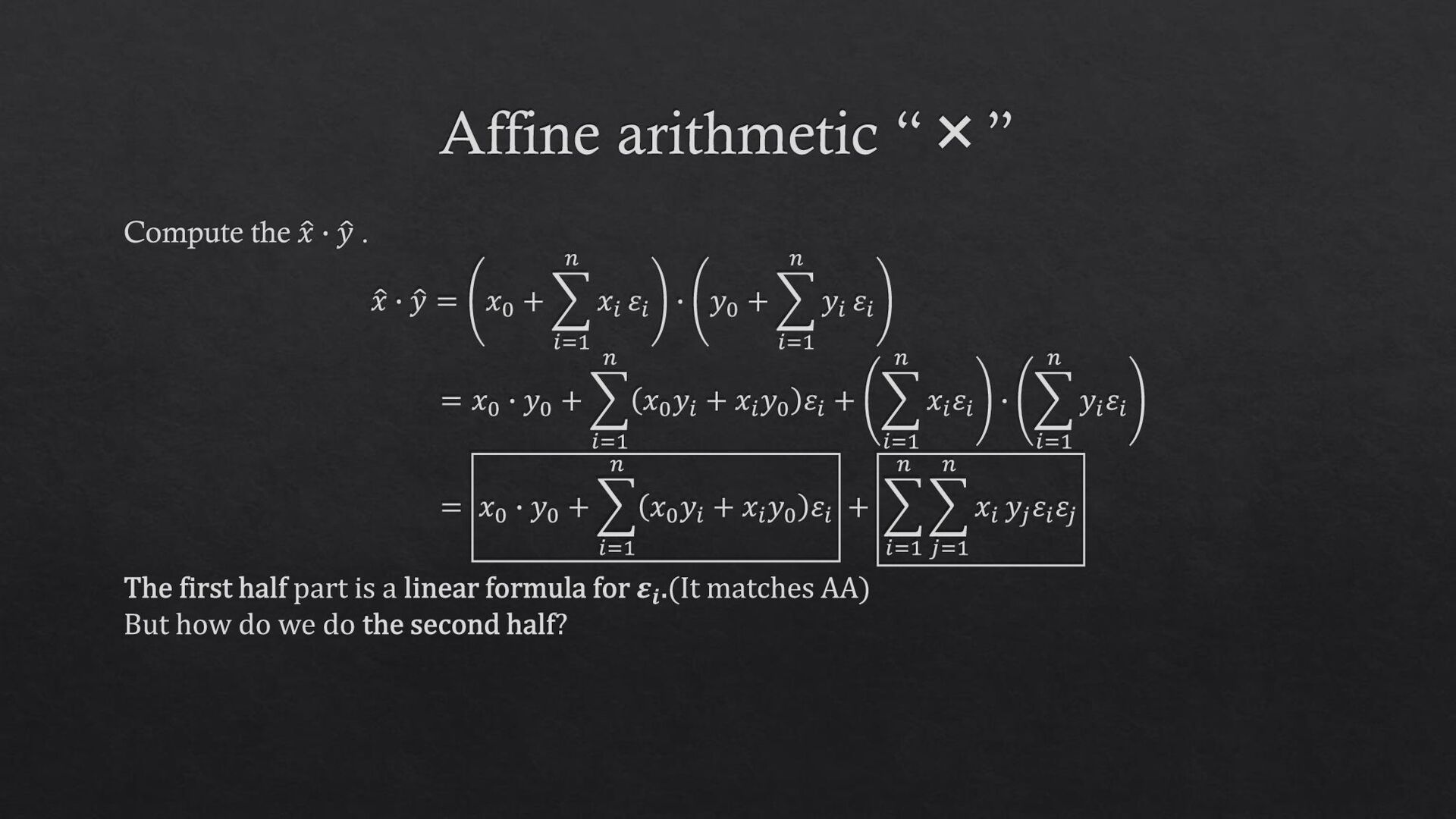
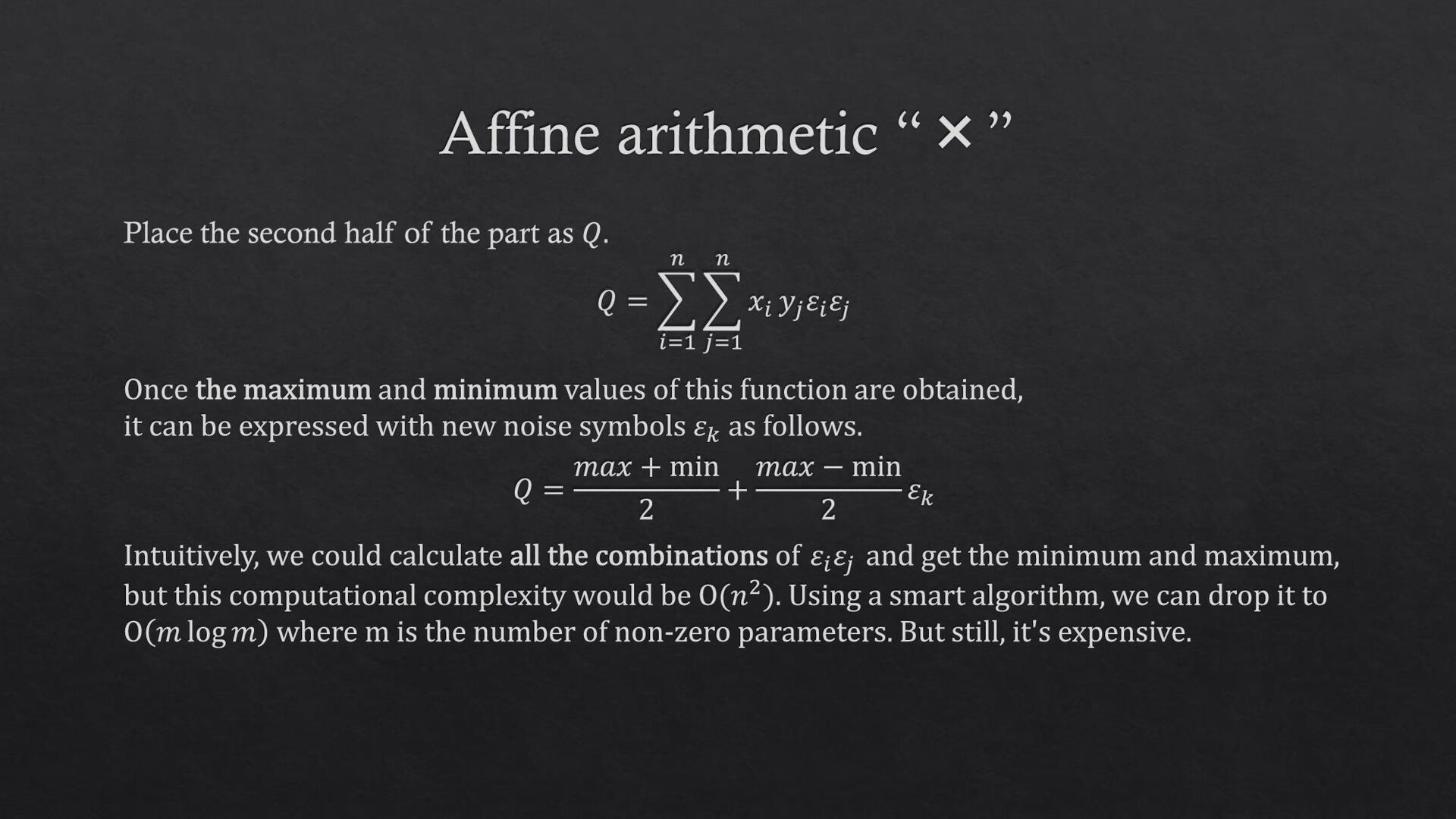
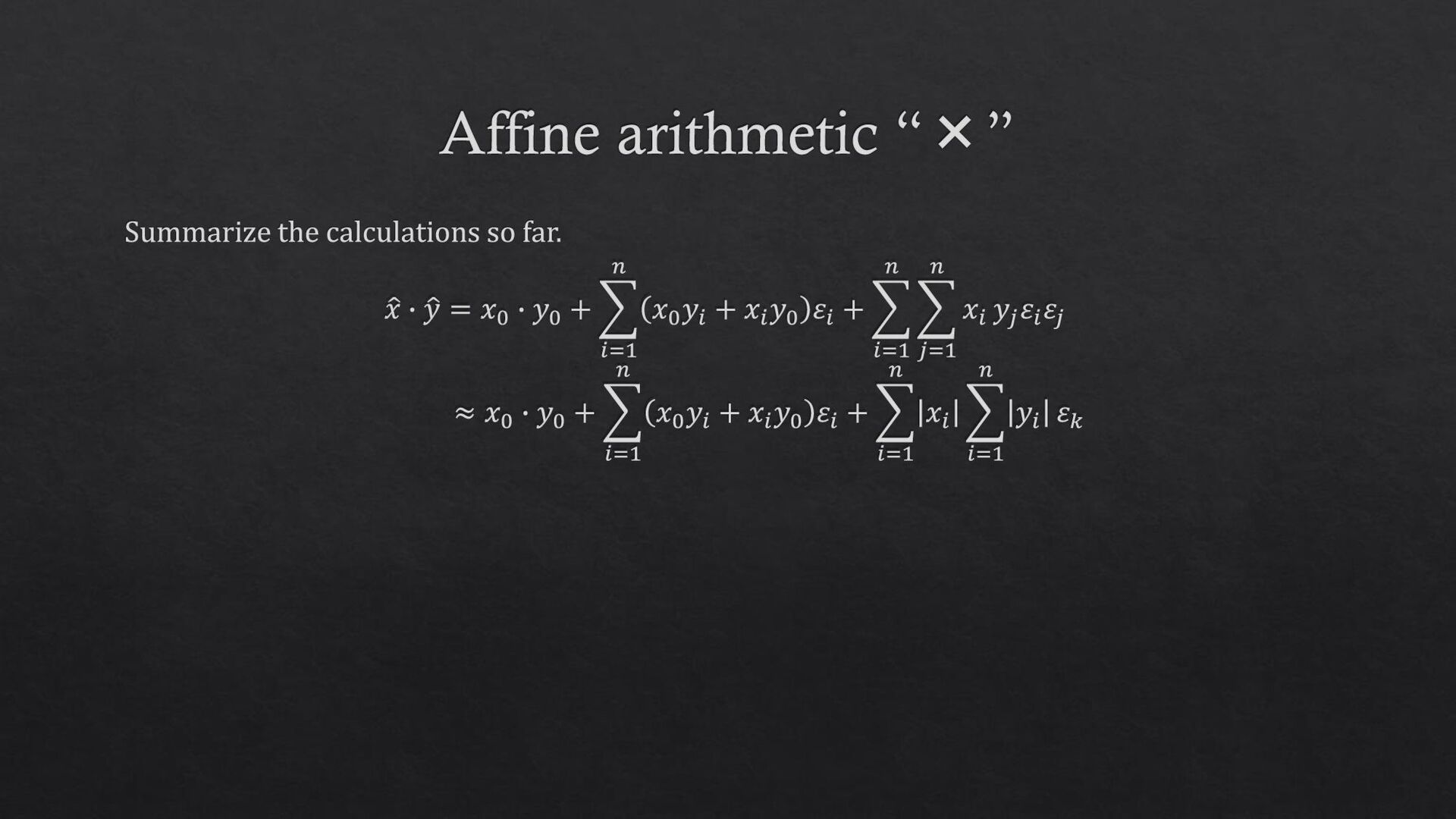
as 𝑄. 𝑄 = 𝑖=1 𝑛 𝑗=1 𝑛 𝑥𝑖 𝑦𝑗 𝜀𝑖 𝜀𝑗 Once the maximum and minimum values of this function are obtained, it can be expressed with new noise symbols 𝜀𝑘 as follows. 𝑄 = 𝑚𝑎𝑥 + min 2 + 𝑚𝑎𝑥 − min 2 𝜀𝑘 Intuitively, we could calculate all the combinations of 𝜀𝑖 𝜀𝑗 and get the minimum and maximum, but this computational complexity would be O(𝑛2). Using a smart algorithm, we can drop it to O 𝑚 log 𝑚 where m is the number of non-zero parameters. But still, it's expensive.
get larger or smaller. At the time of calculating each coefficient 𝑧𝑖, neither roundup nor round down should be done. The differences should be summed up and added up to 𝑧𝑘.
consider making 𝒚 = 𝒑𝒙 + 𝒒 ± 𝜹, which encloses y = 𝑓(𝑥) in that range. This [𝒂, 𝒃] is calculated from the 𝑥0 and 𝜉 of the affine form. 𝑎 = 𝑥0 − ξ 𝑏 = 𝑥0 + 𝜉 𝜉 = 𝑖=1 𝑛 𝑥𝑖
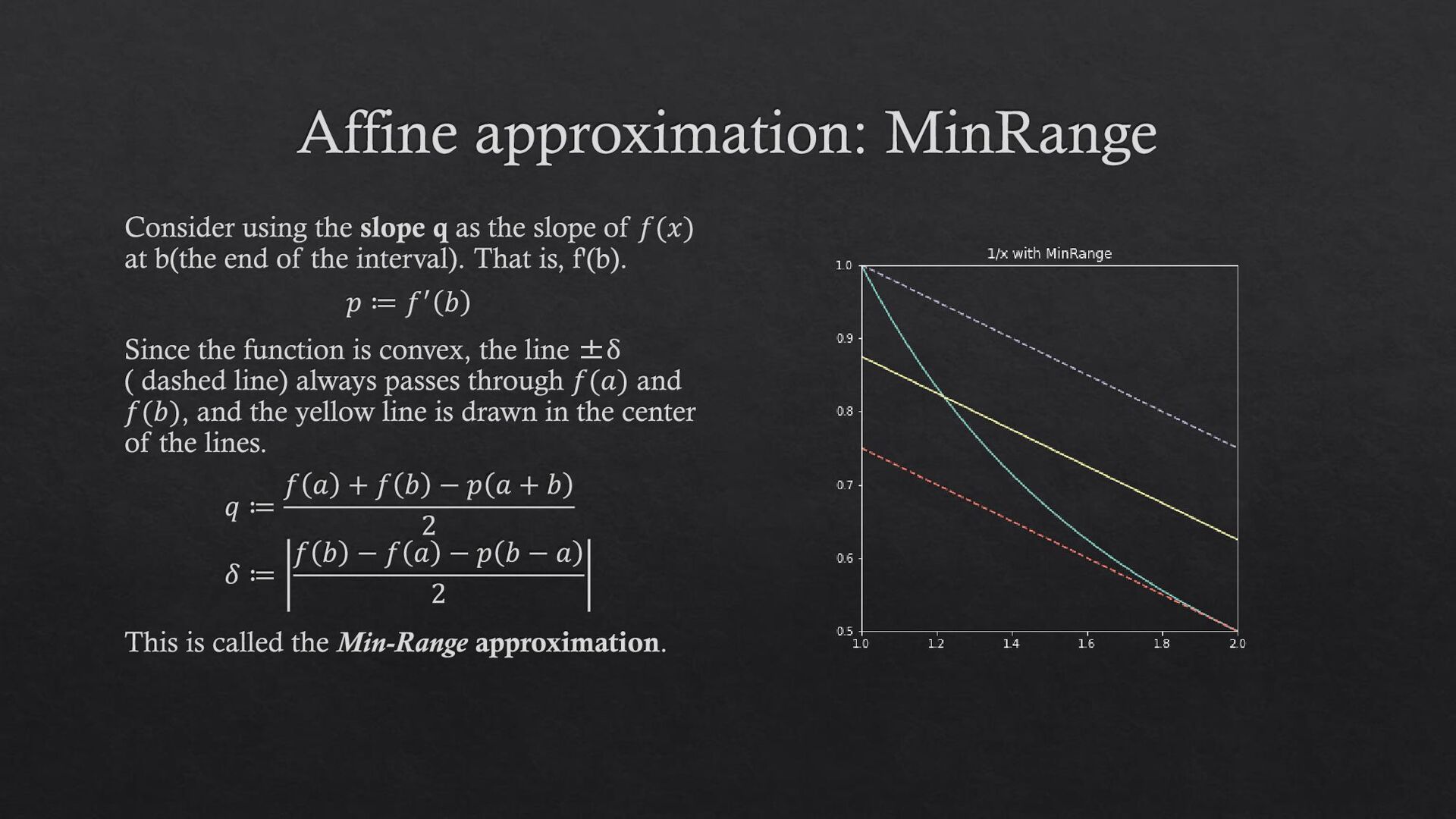
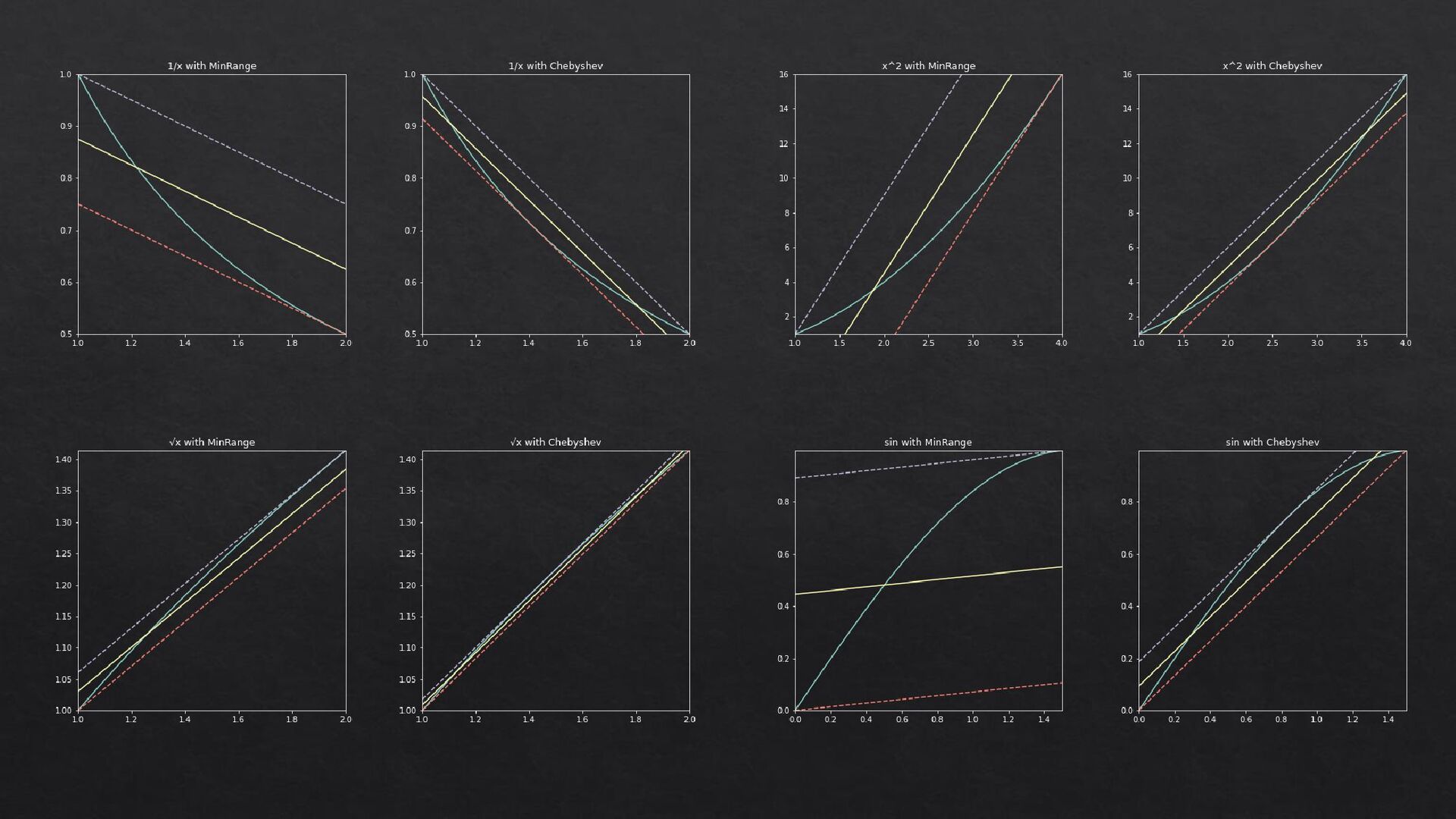
slope of 𝑓(𝑥) at b(the end of the interval). That is, f'(b). 𝑝 ≔ 𝑓′ 𝑏 Since the function is convex, the line ±δ ( dashed line) always passes through 𝑓(𝑎) and 𝑓(𝑏), and the yellow line is drawn in the center of the lines. 𝑞 ≔ 𝑓 𝑎 + 𝑓 𝑏 − 𝑝 𝑎 + 𝑏 2 𝛿 ≔ 𝑓 𝑏 − 𝑓 𝑎 − 𝑝 𝑏 − 𝑎 2 This is called the Min-Range approximation.
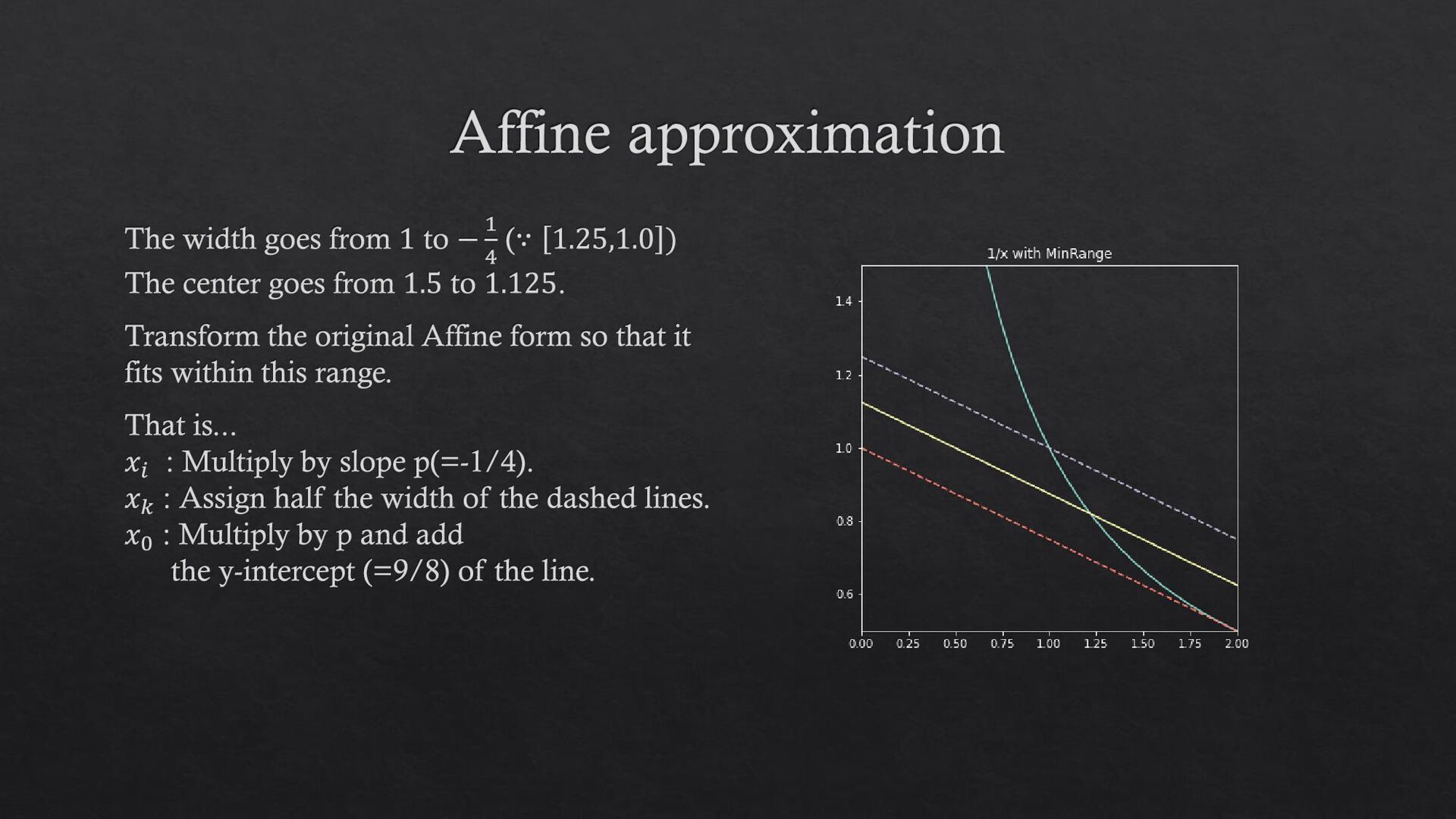
4 (∵ 1.25,1.0 ) The center goes from 1.5 to 1.125. Transform the original Affine form so that it fits within this range. That is... 𝑥𝑖 : Multiply by slope p(=-1/4). 𝑥𝑘 : Assign half the width of the dashed lines. 𝑥0 : Multiply by p and add the y-intercept (=9/8) of the line.
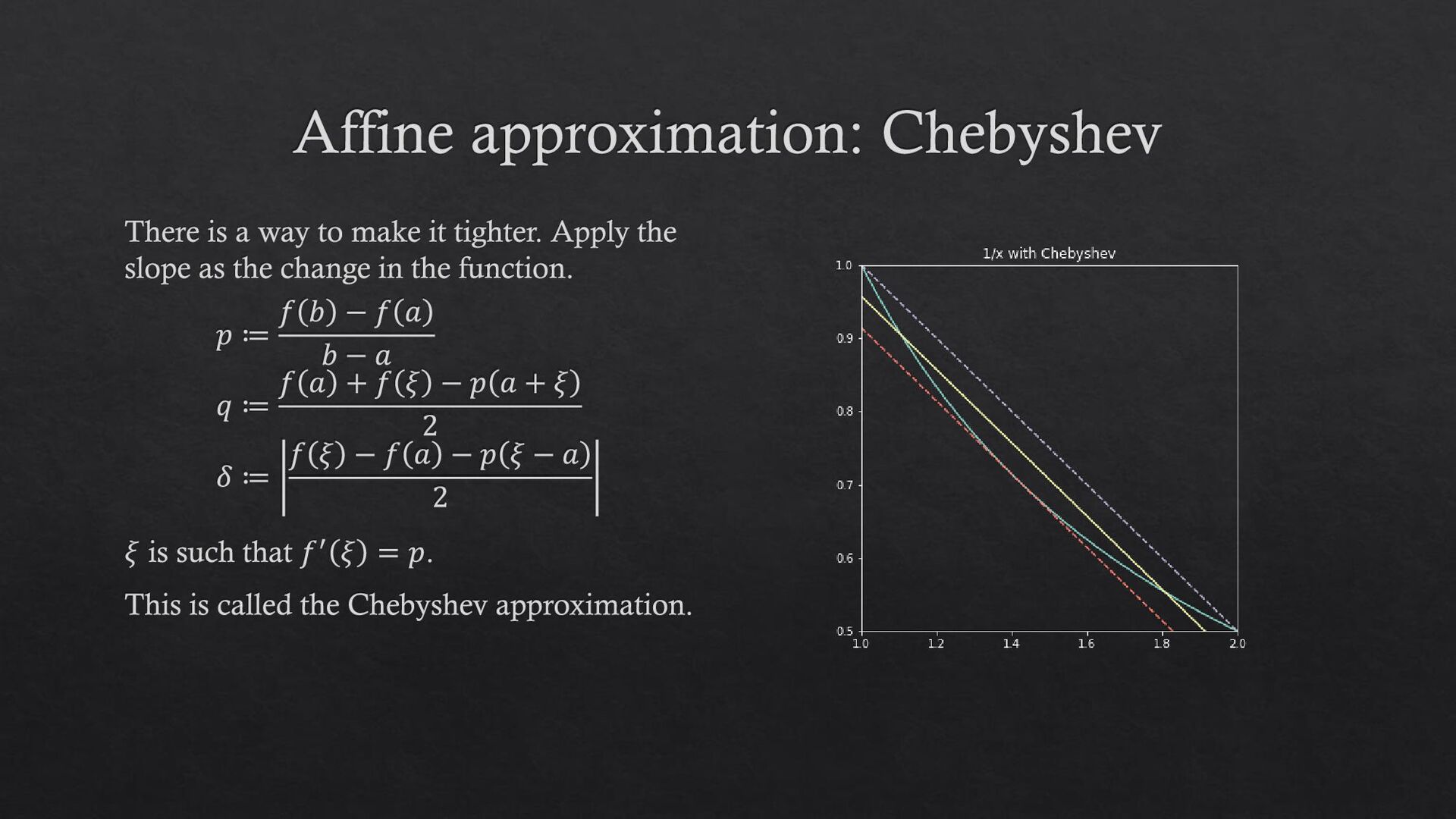
tighter. Apply the slope as the change in the function. 𝑝 ≔ 𝑓 𝑏 − 𝑓 𝑎 𝑏 − 𝑎 𝑞 ≔ 𝑓 𝑎 + 𝑓 𝜉 − 𝑝 𝑎 + 𝜉 2 𝛿 ≔ 𝑓 𝜉 − 𝑓 𝑎 − 𝑝 𝜉 − 𝑎 2 𝜉 is such that 𝑓′ 𝜉 = 𝑝. This is called the Chebyshev approximation.
of real number with error. IA keeps only the interval of error. The mechanism is very simple, but the errors increase exponentially. AA keeps track of where the error came from. It is more computationally intensive, but the error is smaller than IA. There are two affine approximations, Min-Range and Chebyshev. A very simple implementation has been submitted to GitHub.
and improvements of affine arithmetic. Nonlinear Theory and Its Applications, IEICE, 6(3), 341–359. https://doi.org/10.1587/nolta.6.341 [2] Stolfi, J., & de Figueiredo, L. H. (2003). An Introduction to Affine Arithmetic. Trends in Computational and Applied Mathematics, 4(3), 297–312. https://doi.org/10.5540/tema.2003.04.03.0297 [3] Comba, J. L. D., & Stolfi, J. (1993). Affine Arithmetic and its Applications to Computer Graphics.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Affine approximation Suppose there is an interval [𝒂, 𝒃], and](https://files.speakerdeck.com/presentations/bcb2b9f8bb4f41548658aebe4a5f2d0b/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![References [1] Rump, S. M., & Kashiwagi, M. (2015). Implementation](https://files.speakerdeck.com/presentations/bcb2b9f8bb4f41548658aebe4a5f2d0b/slide_44.jpg){kind=link}