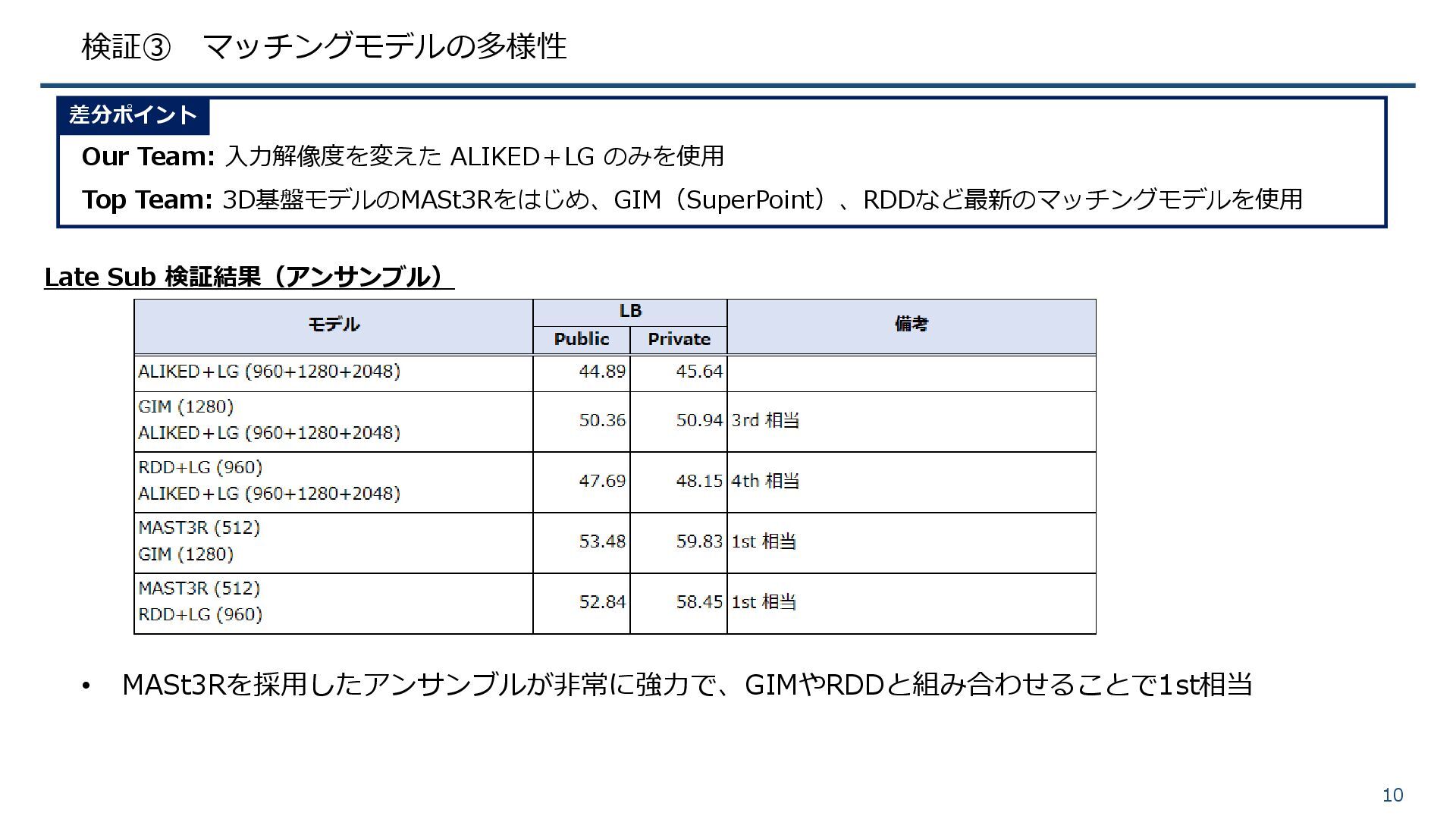
3D基盤モデルのMASt3Rをはじめ、GIM(SuperPoint)、RDDなど最新のマッチングモデルを使用 差分ポイント Late Sub 検証結果(アンサンブル) • MASt3Rを採用したアンサンブルが非常に強力で、GIMやRDDと組み合わせることで1st相当 MASt3R is All You Need?
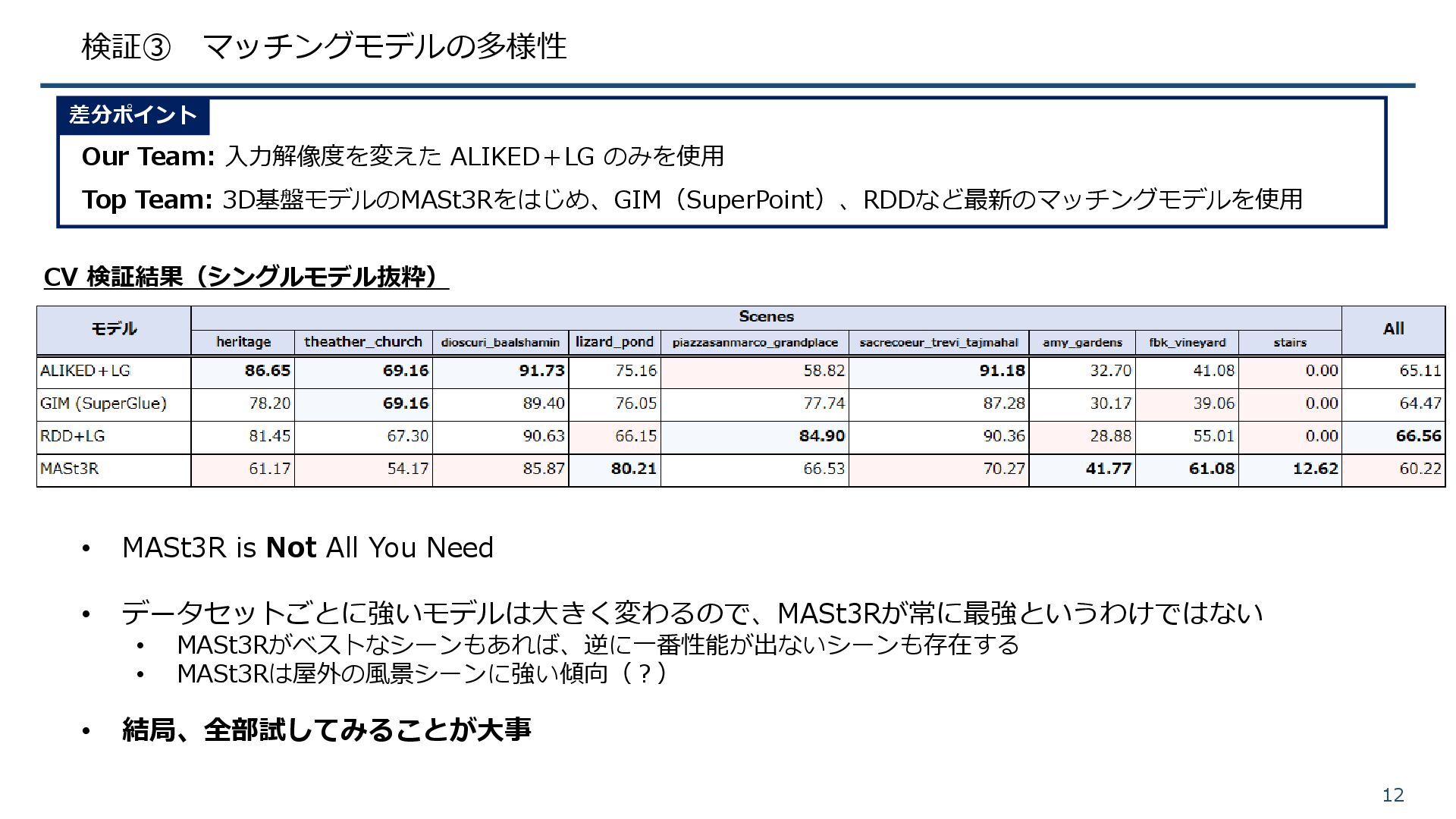
3D基盤モデルのMASt3Rをはじめ、GIM(SuperPoint)、RDDなど最新のマッチングモデルを使用 差分ポイント CV 検証結果(シングルモデル抜粋) • MASt3R is Not All You Need • データセットごとに強いモデルは大きく変わるので、MASt3Rが常に最強というわけではない • MASt3Rがベストなシーンもあれば、逆に一番性能が出ないシーンも存在する • MASt3Rは屋外の風景シーンに強い傾向(?) • 結局、全部試してみることが大事
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}