面倒くさいCAN バスリバーシングの方法論 @ IoTSecJP名古屋 #2
(en: Time-consuming CAN bus reverse engineering techniques)
# keywords
CAN通信, CANバス, ECU, リバースエンジニアリング, 解析
# contents
注意
自己紹介
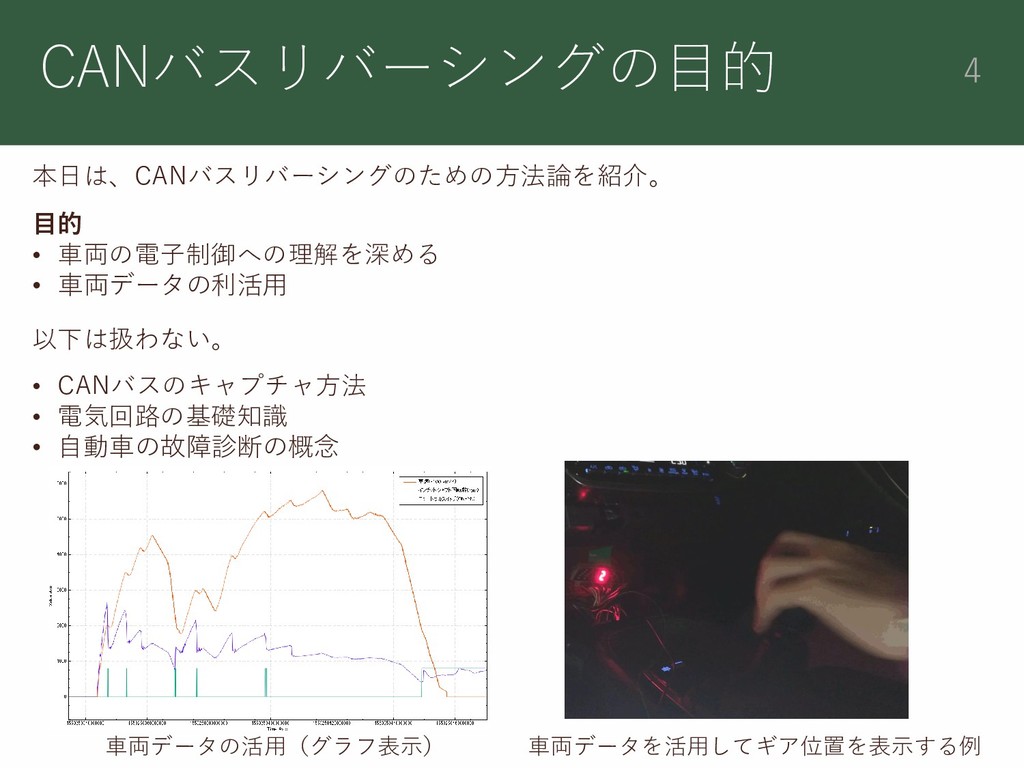
CANバスリバーシングの目的
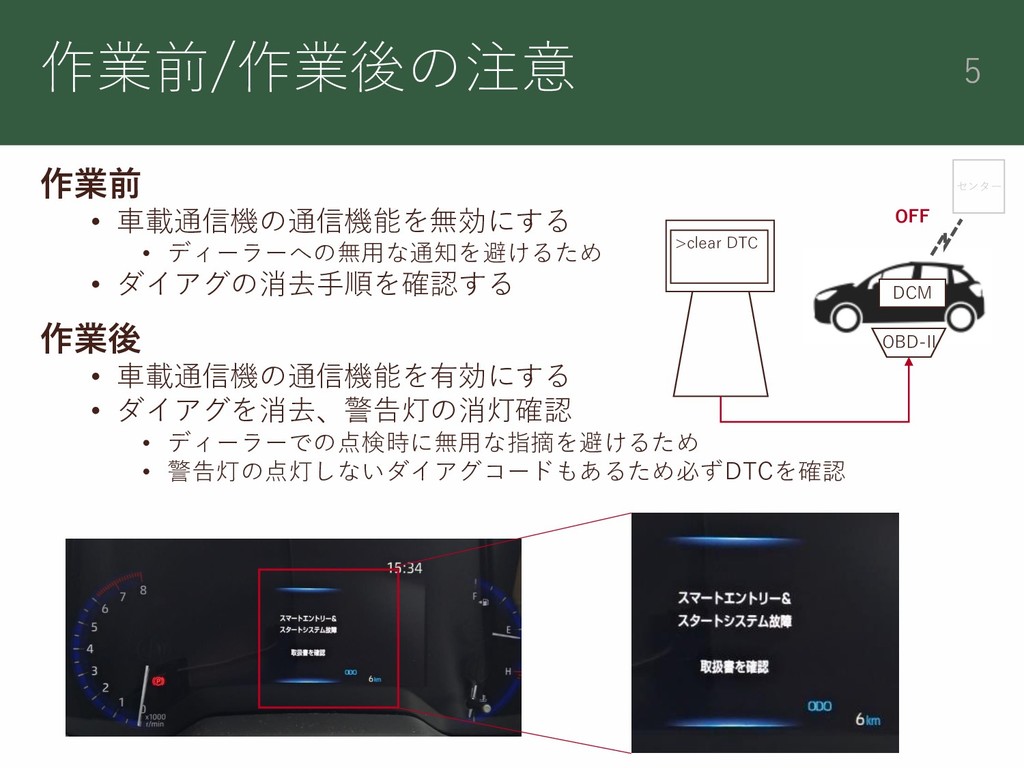
作業前/作業後の注意
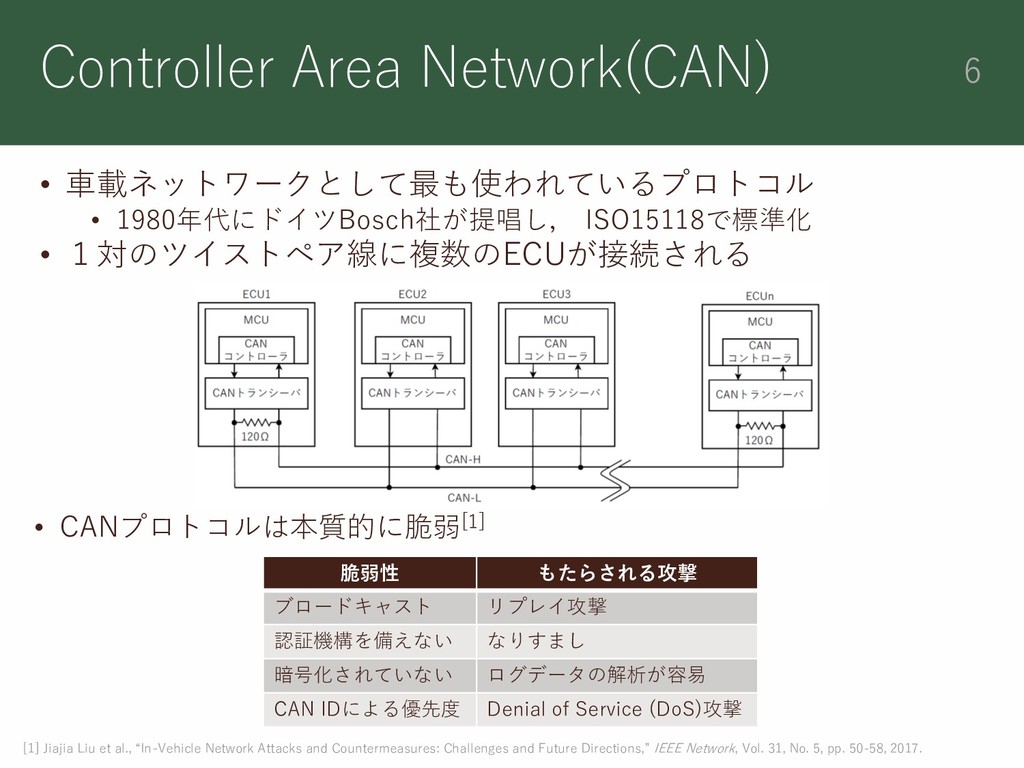
Controller Area Network(CAN)
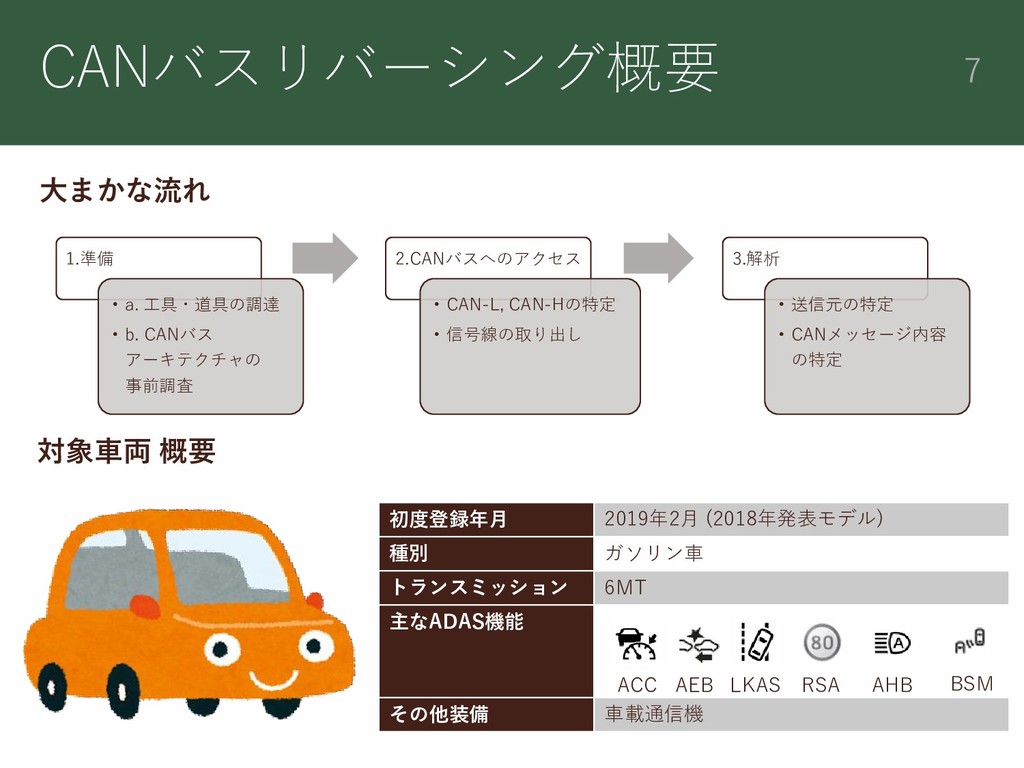
CANバスリバーシング概要
1-a. 工具・道具
補足: 修理書の入手
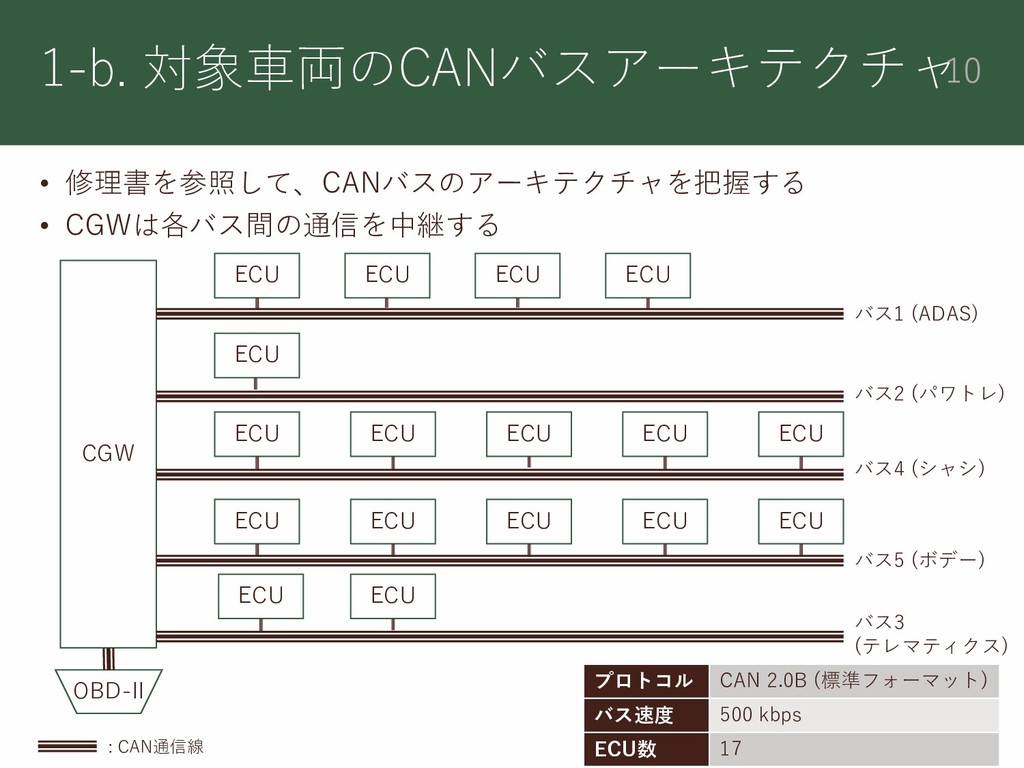
1-b. 対象車両のCANバスアーキテクチャ
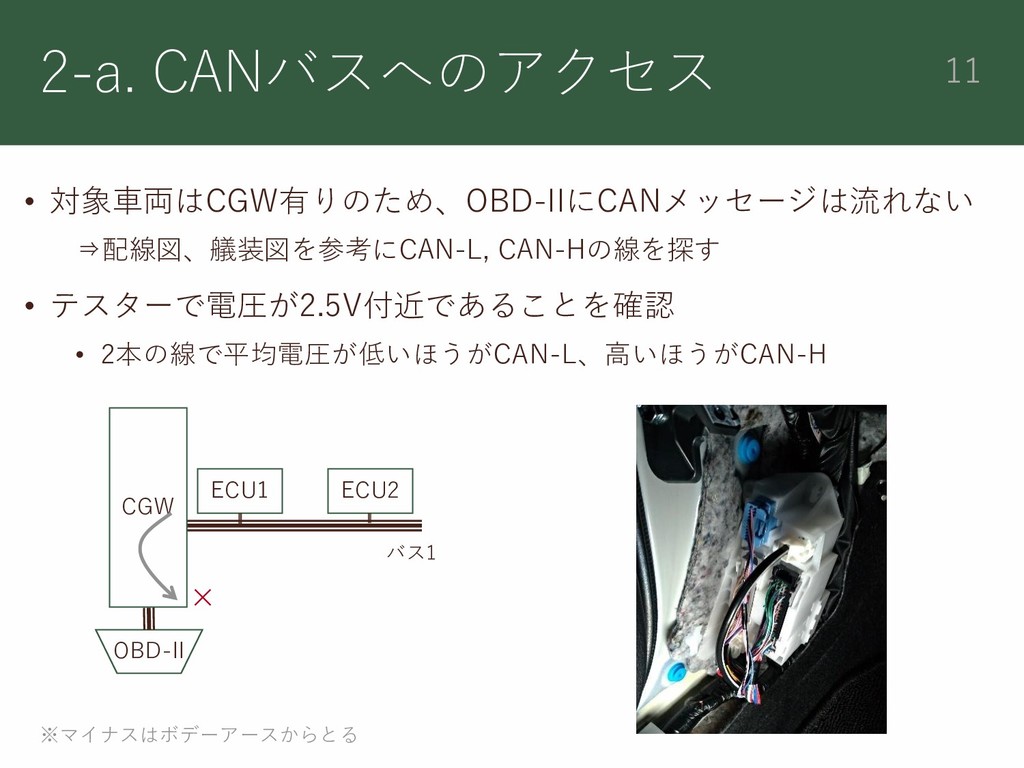
2-a. CANバスへのアクセス
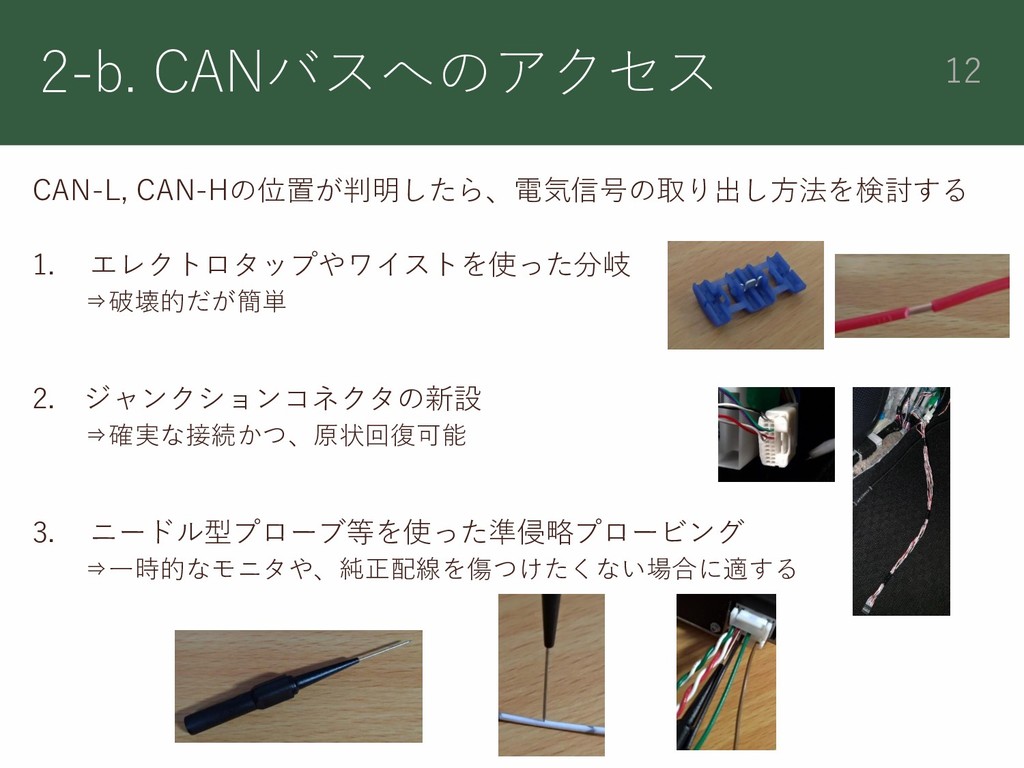
2-b. CANバスへのアクセス
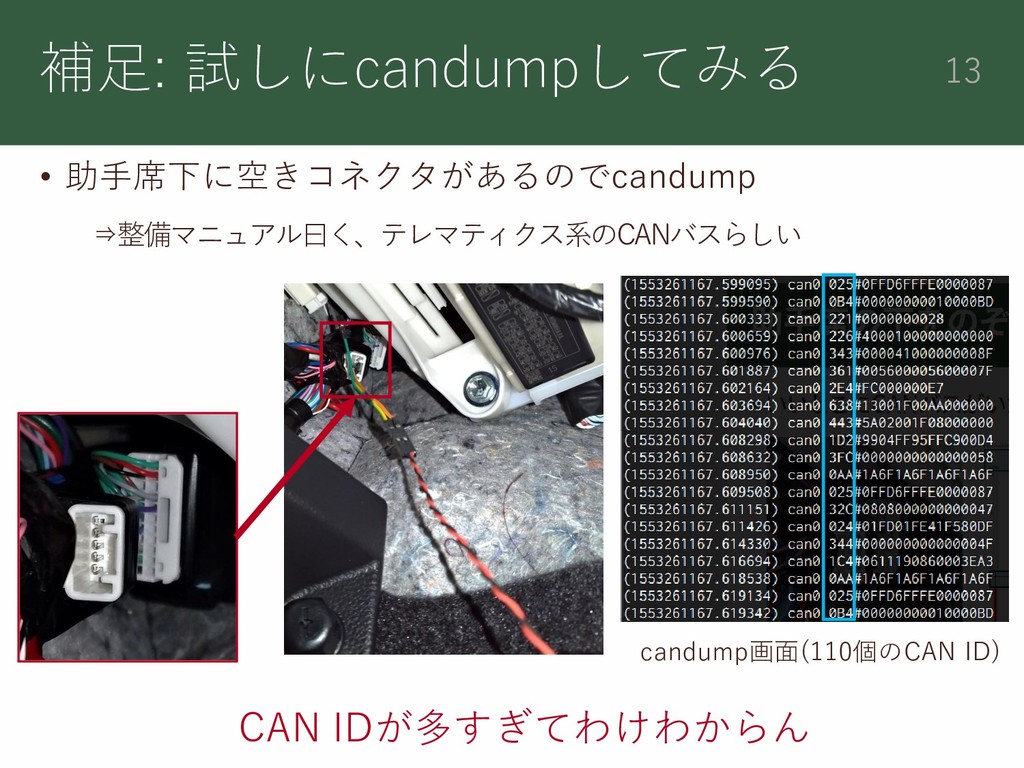
補足: 試しにcandumpしてみる
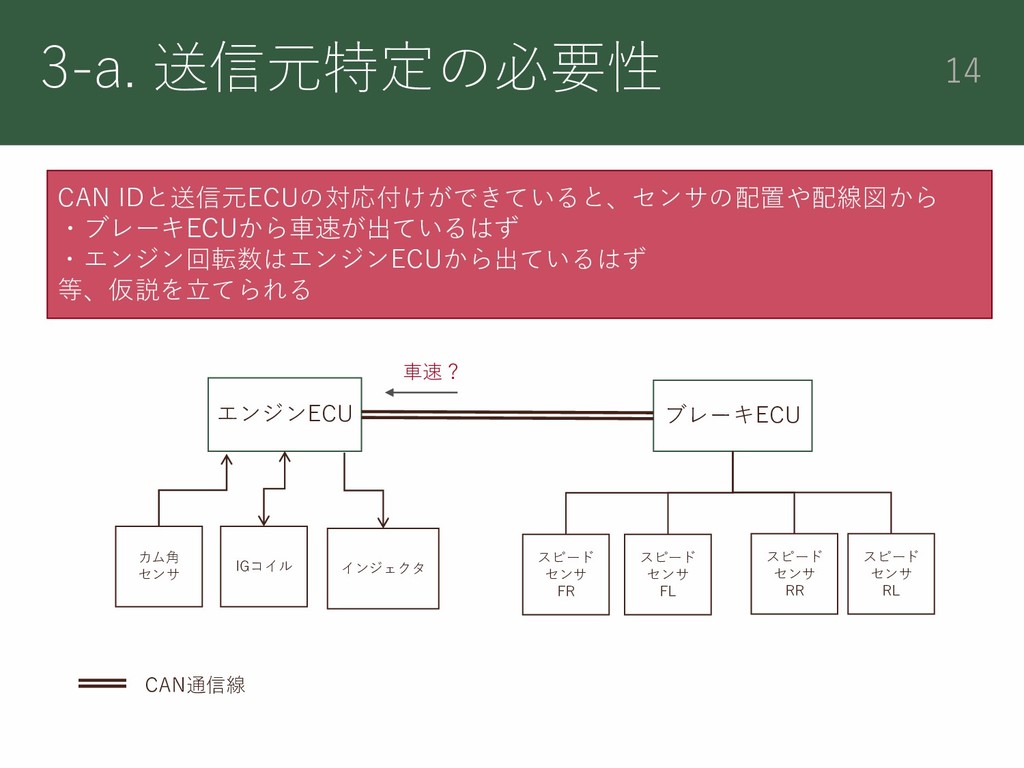
3-a. 送信元特定の必要性
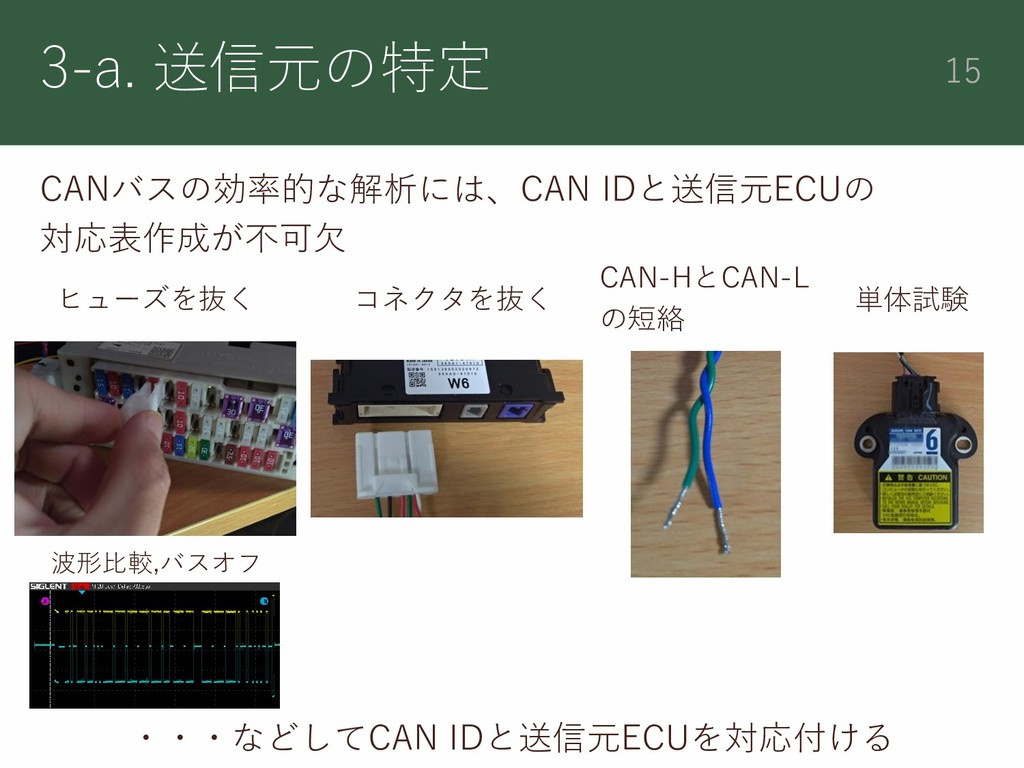
3-a. 送信元の特定
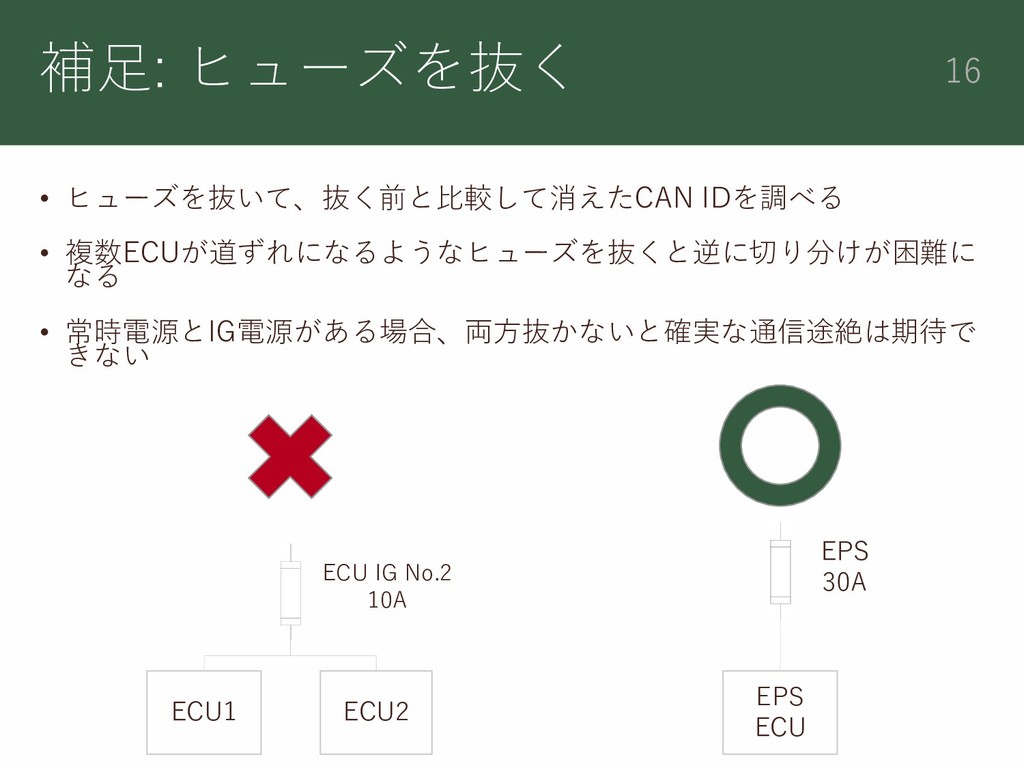
補足: ヒューズを抜く
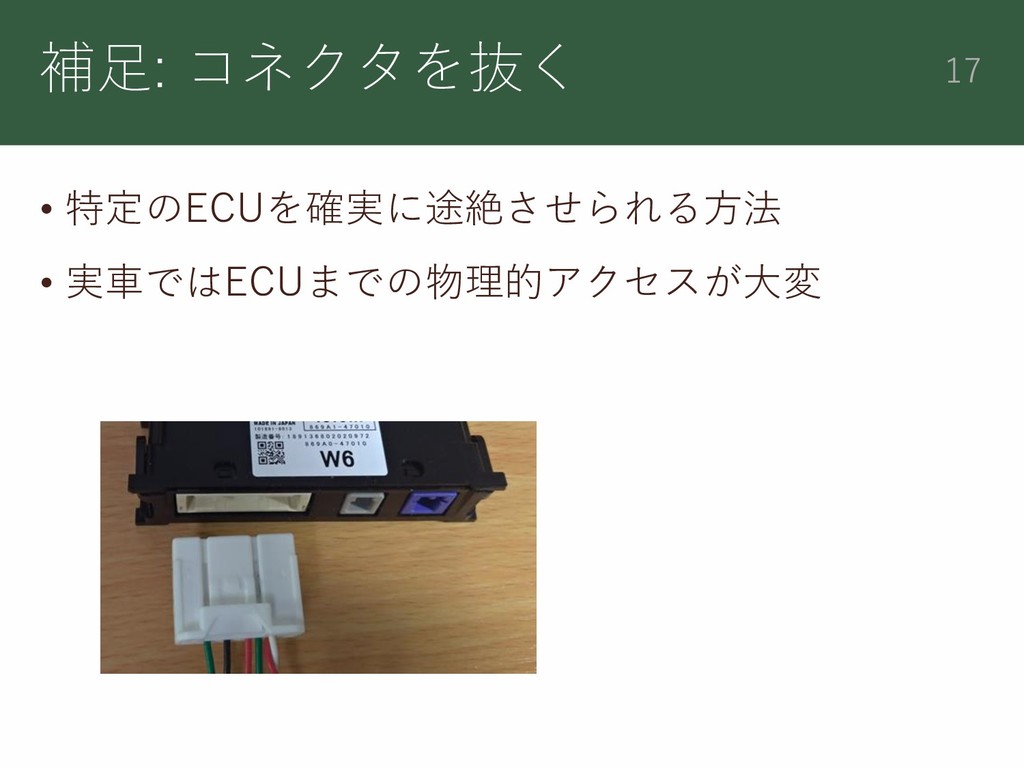
補足: コネクタを抜く
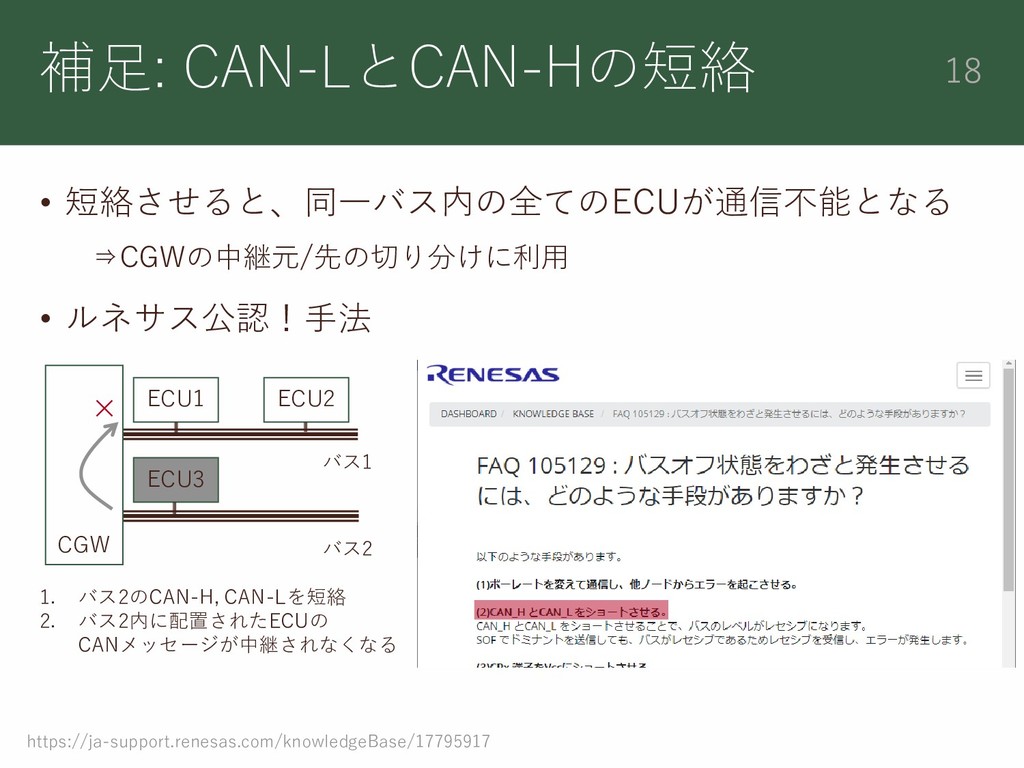
補足: CAN-LとCAN-Hの短絡
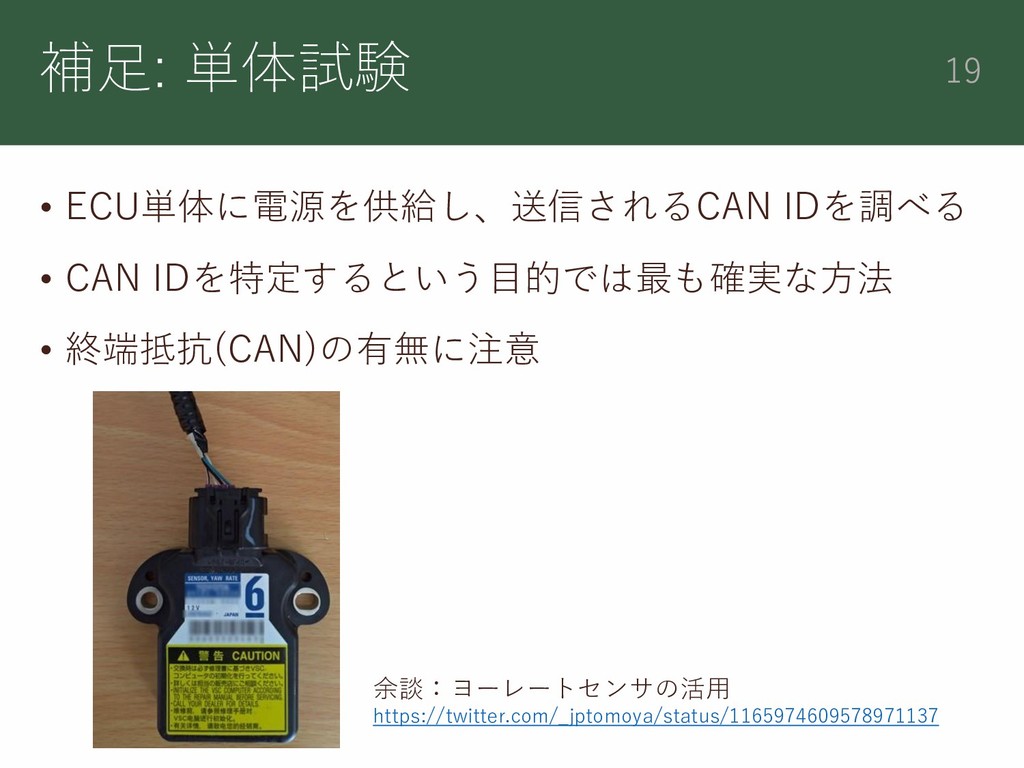
補足: 単体試験
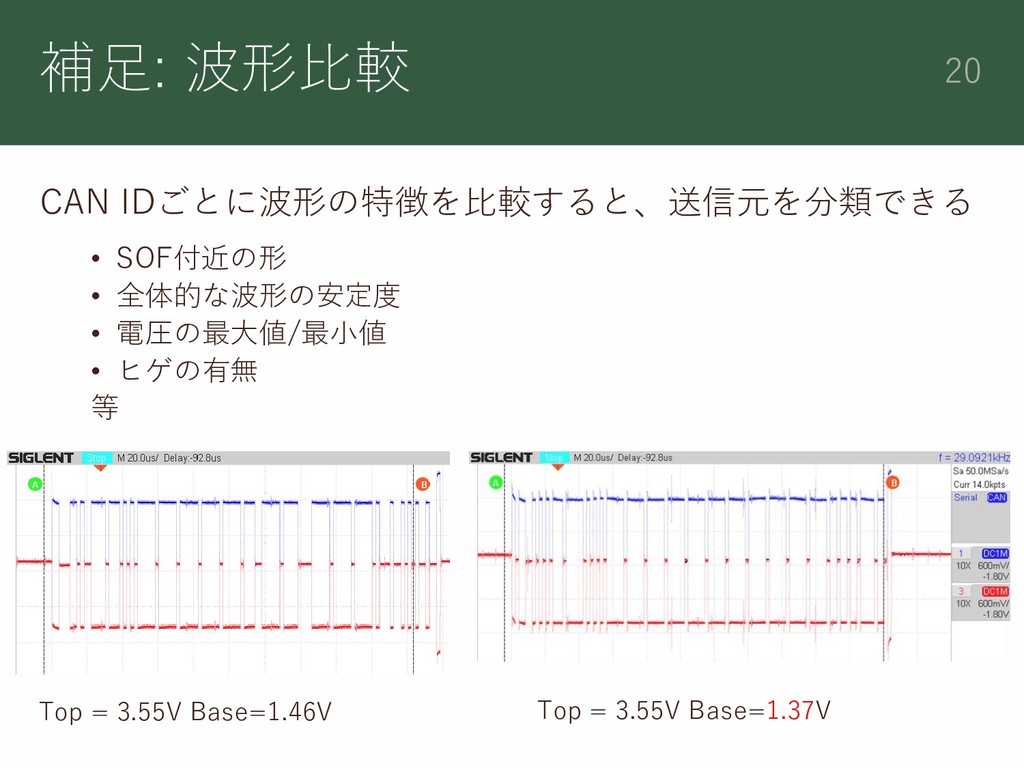
補足: 波形比較
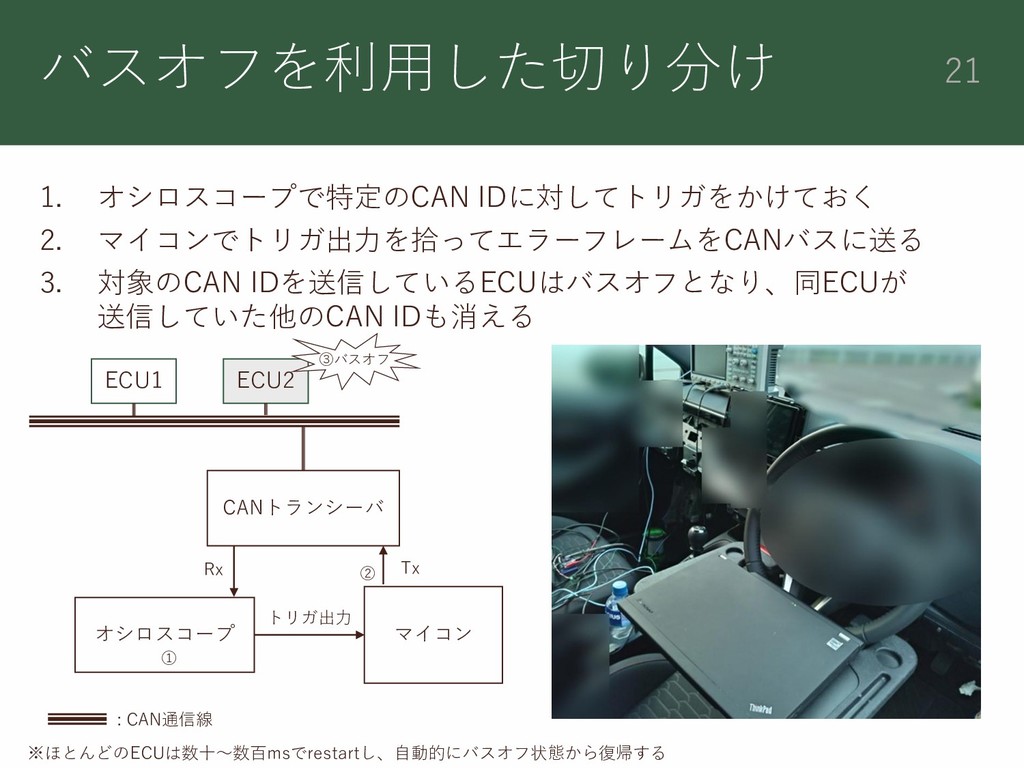
バスオフを利用した切り分け
3-b. CANメッセージ内容の特定
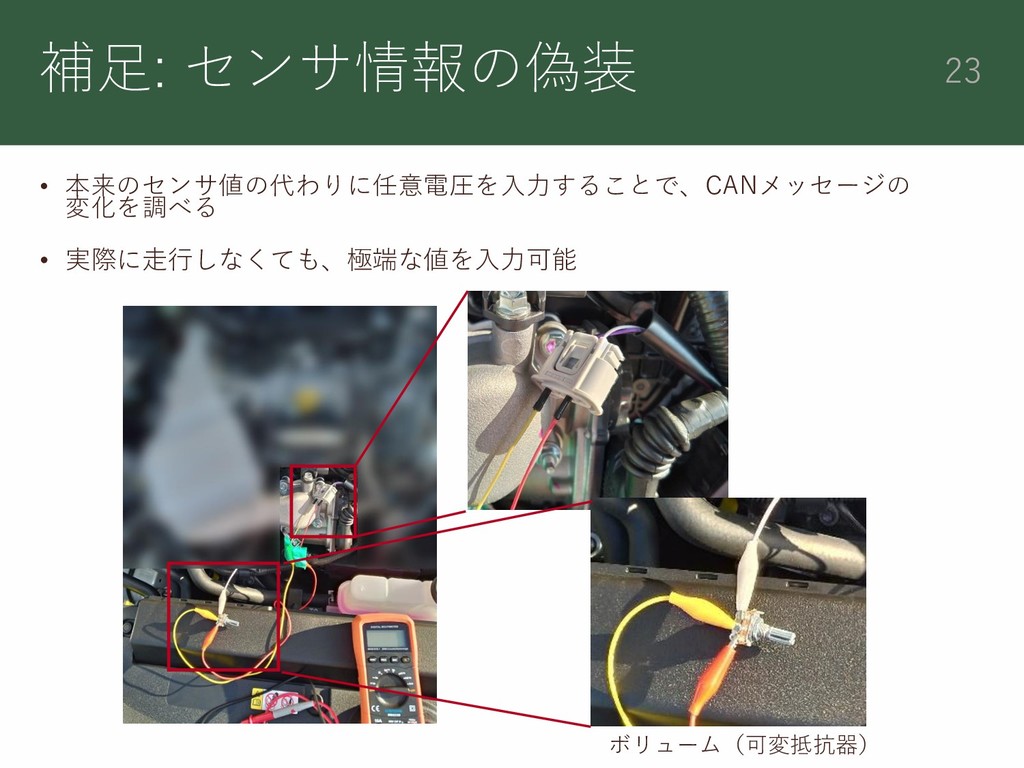
補足: センサ情報の偽装
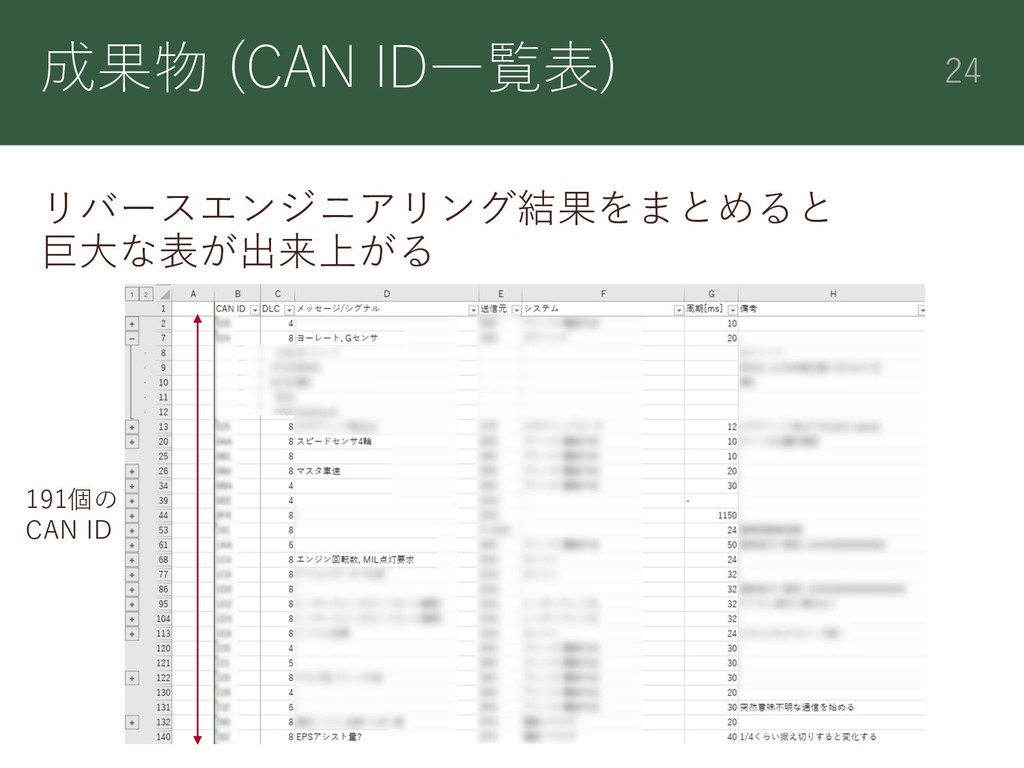
成果物 (CAN ID一覧表)
なぜ車は攻撃されるか
最近のトピックス
まとめ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}