Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Open-RMFを応用したクラウドフリート管理システムの構築
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
株式会社アプトポッド
December 27, 2023
1.9k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Open-RMFを応用したクラウドフリート管理システムの構築
ROSConJP2023で発表した資料です。
https://www.aptpod.co.jp
株式会社アプトポッド
December 27, 2023
More Decks by 株式会社アプトポッド
See All by 株式会社アプトポッド
ROS開発を効率化するDXソリューション intdashクラウドサービスのご紹介
aptpod
0
920
Featured
See All Featured
[Rails World 2023 - Day 1 Closing Keynote] - The Magic of Rails
eileencodes
38
2.9k
Connecting the Dots Between Site Speed, User Experience & Your Business [WebExpo 2025]
tammyeverts
11
980
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
Data-driven link building: lessons from a $708K investment (BrightonSEO talk)
szymonslowik
1
1.2k
How to Think Like a Performance Engineer
csswizardry
28
2.7k
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
620
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
620
The Invisible Side of Design
smashingmag
301
52k
Hiding What from Whom? A Critical Review of the History of Programming languages for Music
tomoyanonymous
3
1k
Fashionably flexible responsive web design (full day workshop)
malarkey
408
67k
Un-Boring Meetings
codingconduct
0
350
The Curse of the Amulet
leimatthew05
2
13k
Transcript
Open-RMFを応用した クラウドフリート管理システムの構築 (株)アプトポッド 影山 勝彦 © aptpod Inc. All Rights
Reserved. 1 2023/09/26 ROSConJP 2023
自己紹介 © aptpod Inc. All Rights Reserved. 2 • (株)アプトポッド
• intdashという高速データストリーミン グハブを中心とした製品群を販売 • ROSとの関わり • intdashをハブとしたROSのNAT越え、 ROS通信の可視化、遠隔制御などの 機能を提供 • 発表者 • 影山勝彦 ロボット関連のソフトウェア開発を担当
解決したい課題 © aptpod Inc. All Rights Reserved. 3 これまでやってきたこと: 1台のロボットを対象とした遠隔制御を提供
今後やりたいこと: 複数のロボットを対象とした監視、管理や 制御を行いたい
OpenRMFを採用 © aptpod Inc. All Rights Reserved. 4 OpenRMFとは 複数のフリートや、ドア、エレベータ
などの装置などを統合して管理する ことができるライブラリとツール群 基本的な提供機能 • 統合した経路管理 • ロボット間の競合解決の調停 • タスクの割り当て
試作してみた © aptpod Inc. All Rights Reserved. 5 ポイント •
OpenRMFのコア部分をAWS EC2上のDockerで動かす • ロボットの制御はFree Fleetを用いて、ローカルで • OpenRMFコアとローカルの通信はintdashを介す • 通過するROSトピックを一部intdashで可視化 弊社会議室 ロボ制御PC コンソールPC ・Free Fleet ・Navigation2 × 3台
OpenRMFを使った開発フロー © aptpod Inc. All Rights Reserved. 6 • ロボットの繋ぎこみ
• Fleet Adapterの開発 • ロボットの種別ごとに1つ • 走行計画作成、OpenRMFコアとの通信などを担当 • テンプレートを利用して開発するのがよい(全部1から作るのは大変) • ロボットの細かい制御は各々対応 • OpenRMFでは、Free Fleetが用意されている • マップの作製 • 図面をベースに走行レーンを設定 • シミュレーション用にGazeboワールドを生成する機能もあり • 制御用UIの準備 • 弊社Webアプリを併用 • RESTやROSメッセージによる制御が可能 • 自社システムとの連携 • 必要なトピックをintdashを経由してブリッジする
自社サービス(intdash)との接続 © aptpod Inc. All Rights Reserved. 7 • APIサーバを自社サービスに接続
• Webアプリの汎用ボタンイベントをAPIサーバに繋ぐスクリプトを準備 汎用UIボタンパーツ intdash受信 スクリプト RMF-Web APIサーバ REST 弊社プロトコル 弊社プロトコル
クラウドとローカル環境の接続 © aptpod Inc. All Rights Reserved. 8 弊社会議室 ロボ制御PC
コンソールPC ・Free Fleet ・Navigation2 × 3台 囲った部分で、どのような通信を行っているのか
クラウドとローカル環境の接続 © aptpod Inc. All Rights Reserved. 9 弊社会議室 ロボ制御PC
× 3台 スケジュール 管理ノード APIサーバ Fleet Adapter タスク割り当て ノード etc… 地図サーバ Free Fleet msgs Sensor msgs Path request (Mode request) (Destination request) Fleet state その他カメラ映像など 内 製 ブ リ ッ ジ Free Fleet Client Free Fleet Server Navigation2 × 3 内製ブリッジ ※自社プロトコルでカプセル化 WiFi
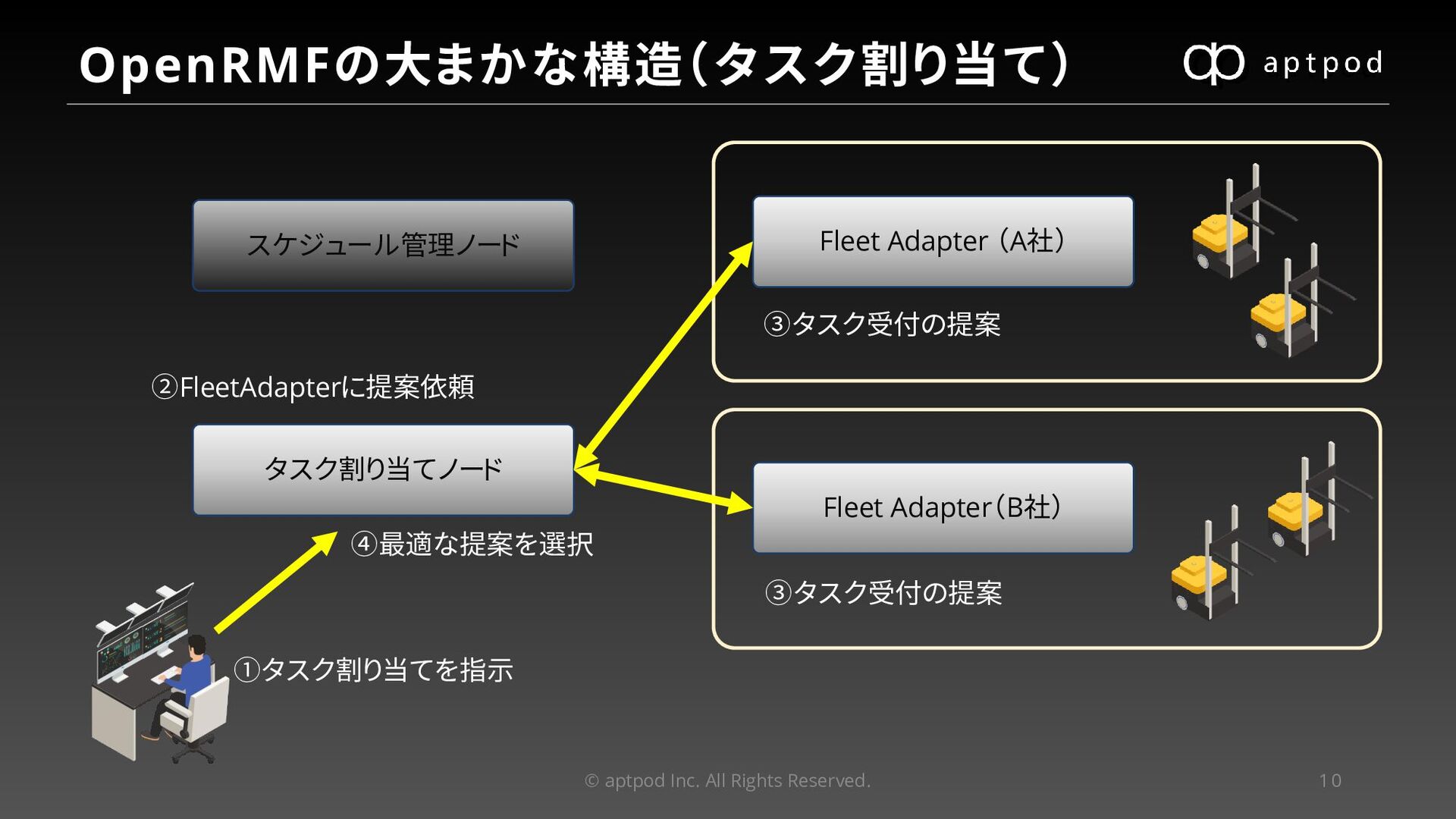
OpenRMFの大まかな構造(タスク割り当て) © aptpod Inc. All Rights Reserved. 1 0 Fleet
Adapter (A社) Fleet Adapter(B社) スケジュール管理ノード タスク割り当てノード ①タスク割り当てを指示 ②FleetAdapterに提案依頼 ④最適な提案を選択 ③タスク受付の提案 ③タスク受付の提案
OpenRMFの大まかな構造(競合調停) © aptpod Inc. All Rights Reserved. 1 1 Fleet
Adapter (A社) Fleet Adapter(B社) スケジュール管理ノード タスク割り当てノード ①競合を検知 ②調停を関係者に依頼 ③新しい計画をPublish ③新しい計画をPublish ④ベストな計画を選択
出来上がったものがこちら © aptpod Inc. All Rights Reserved. 1 2 会議室の俯瞰カメラ
RMF-Webコンソール Turtlebot3搭載 カメラ映像 行先制御のROS トピックの可視化 運行指示ボタン
ロボットの動き © aptpod Inc. All Rights Reserved. 1 3 往復移動
開発の感想 © aptpod Inc. All Rights Reserved. 1 4 •
経路の生成の特性 • 競合回避が難しいケースだとうまく調停できない場合あり • リファレンス実装はあるが、Fleet Adapter(=フリートベンダー)の責務なので、OpenRMF コアが経路生成の性能を保証してくるわけではない • Nav2を使ったBurger制御の難しさ • 開発に慣れるまでの時間 • AGV前提なので、OpenRMFが計画した時間通りに、Burgerが走行しないと調停が 頻発 • Docker活用すべき • OpenRMFでは多数のノードが動くことになるので、機能ごとにコンテナで管理する と開発面でも、デプロイする際にも有効 • デバッグの難しさ • Rvizだけだと解析が難しかったので、提案中の経路情報を画像ファイルに保存する 機能などを追加
まとめ © aptpod Inc. All Rights Reserved. 1 5 •
実現性の検証ができた • 活発に開発中なので、使いどころはよく理解して利用する必要がある • 状況に応じたきめ細かい経路生成や制御をやりたい場合は、カスタム開発 必要 • 今後に期待 • Fleet Adapter開発がより容易になってほしい • AMRへの本格対応
ご清聴ありがとうございました © aptpod Inc. All Rights Reserved. 1 6
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}