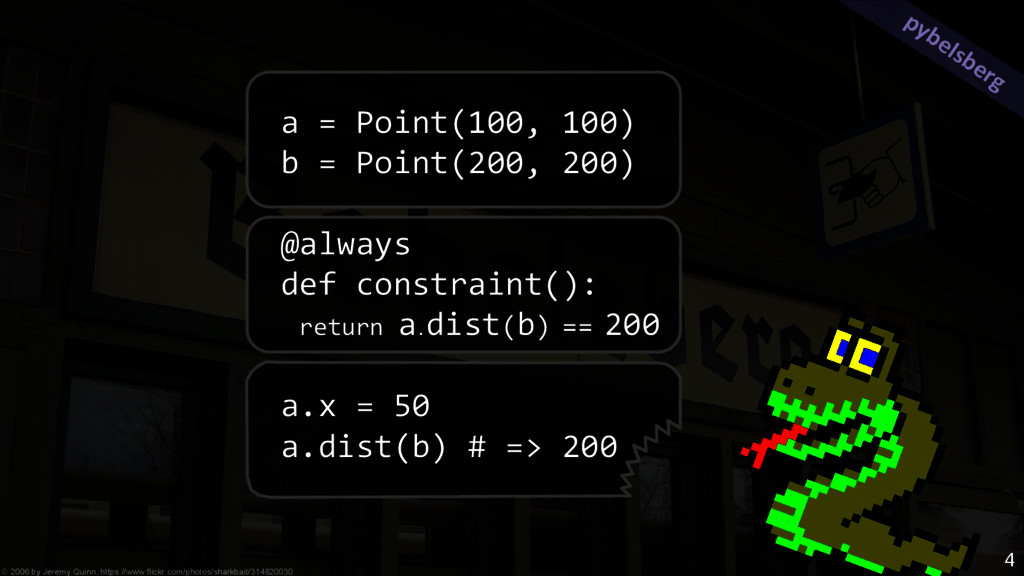
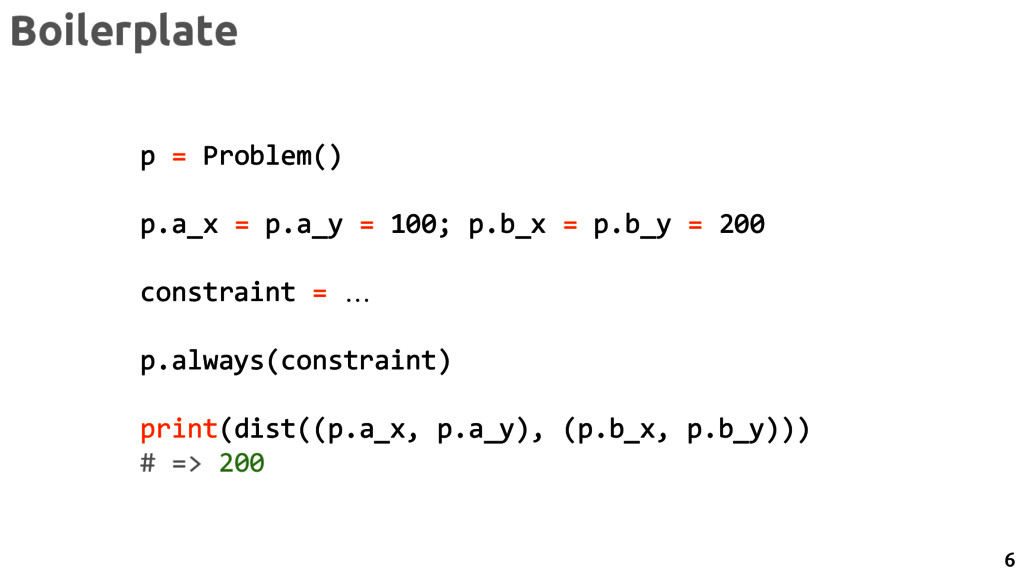
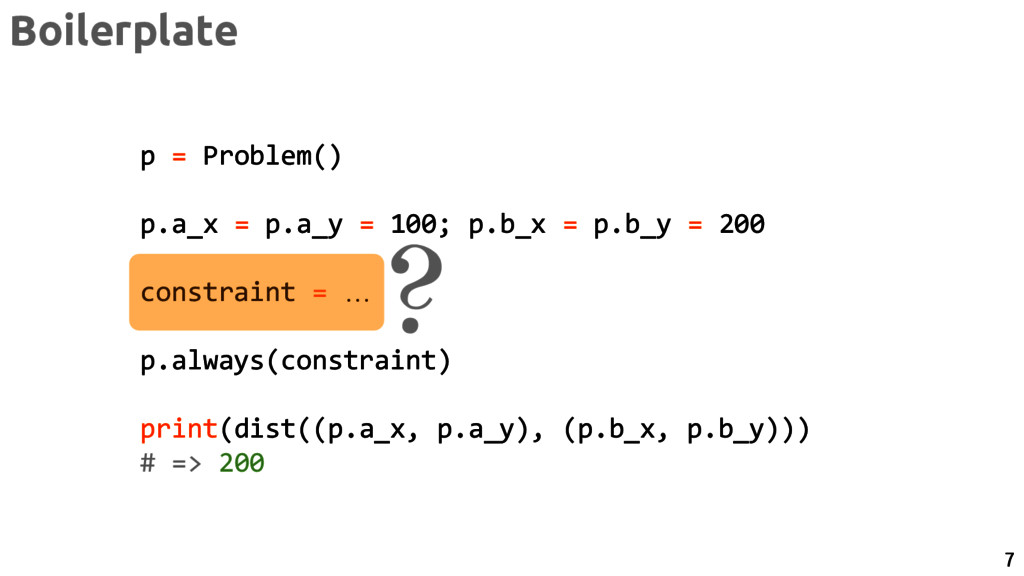
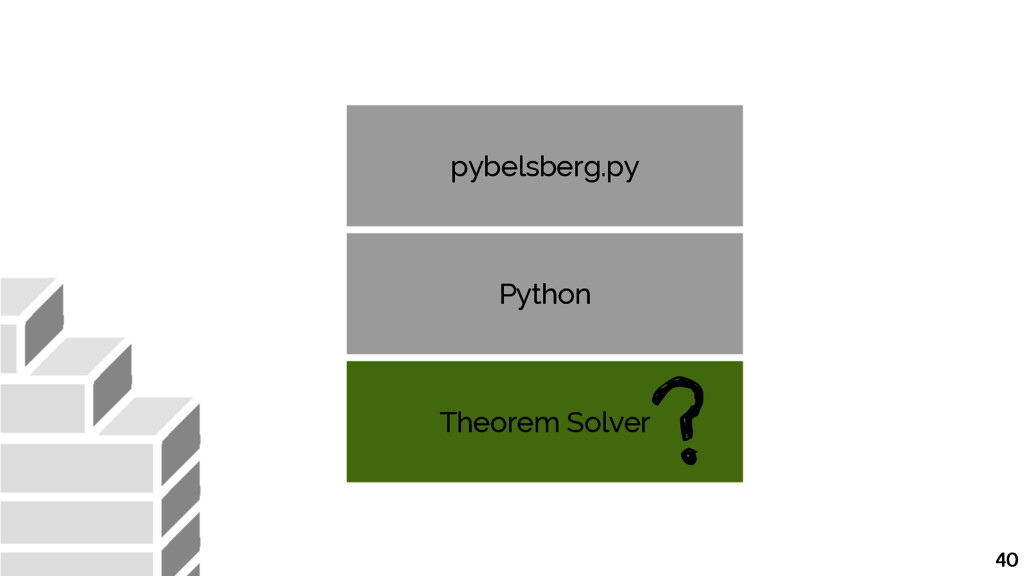
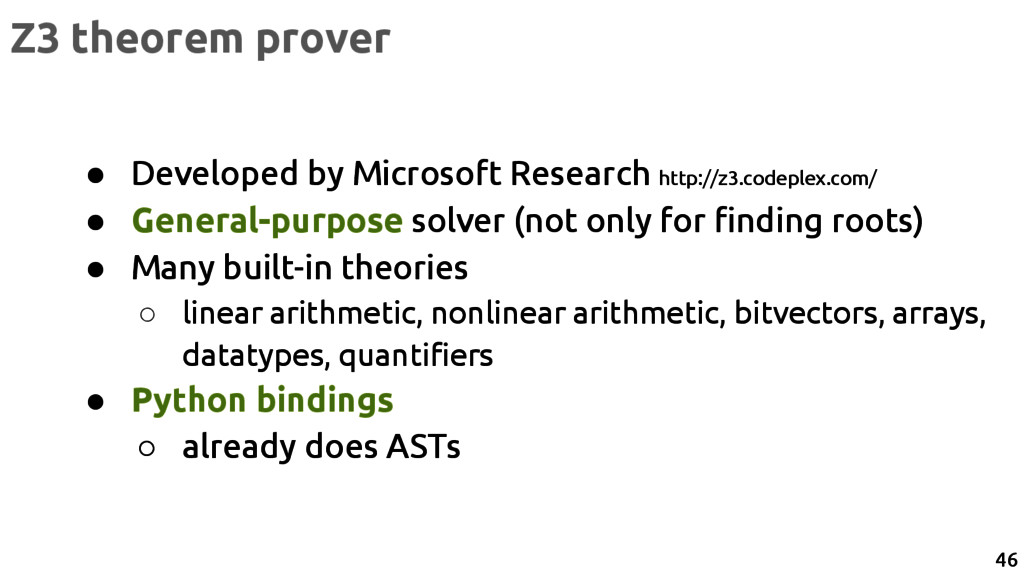
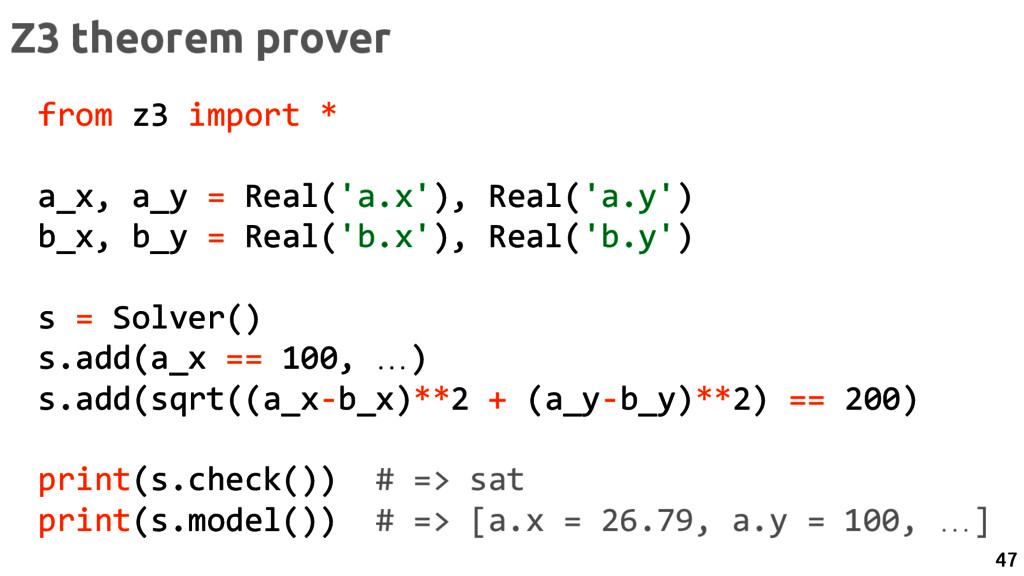
Pybelsberg is a project allowing constraint-based programming in Python using the Z3 theorem prover [1].
It is available on Github [2] and is licensed under the BSD 3-Clause License.
By Robert Lehmann, Christoph Matthies, Conrad Calmez, Thomas Hille.
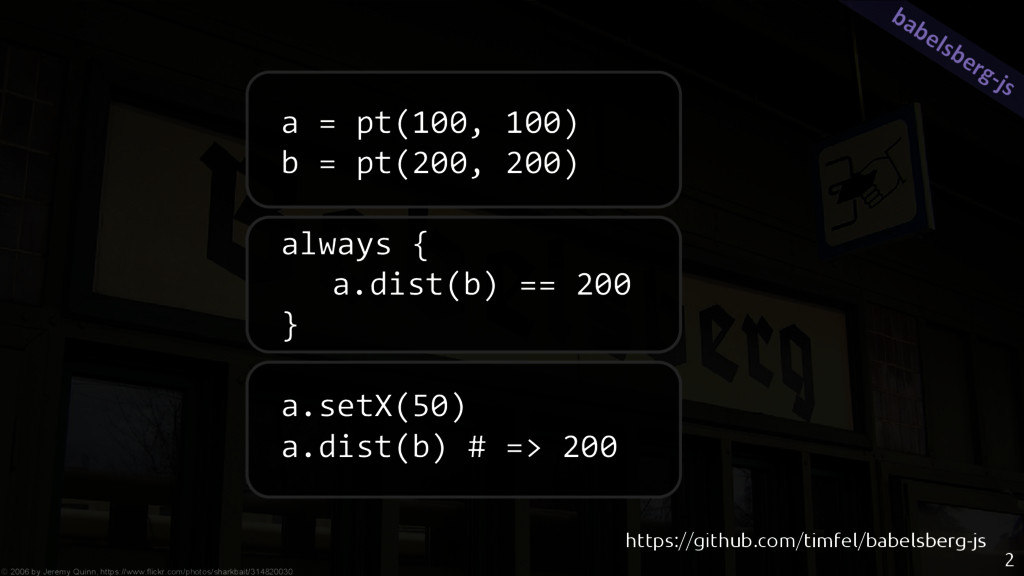
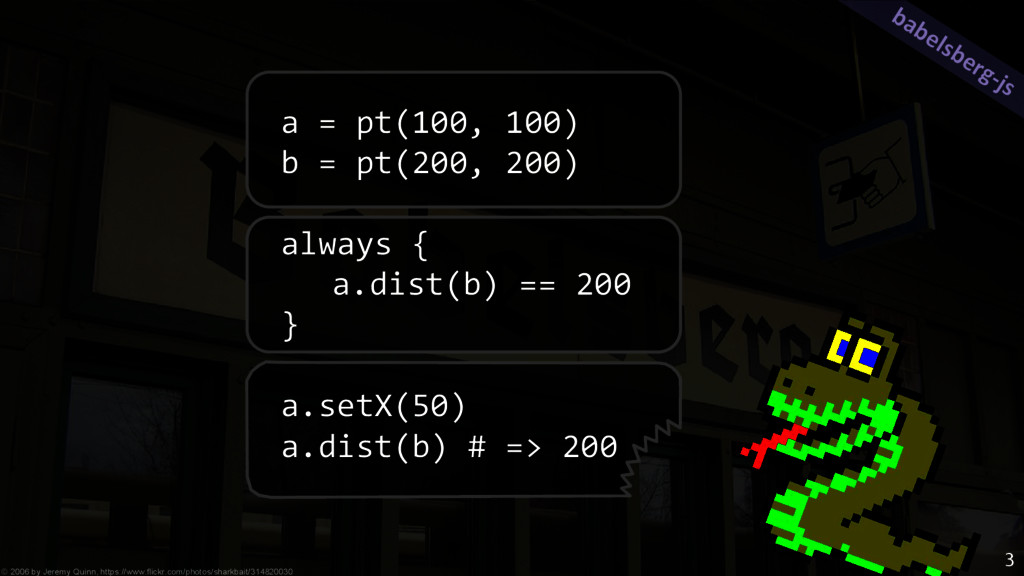
See also Babelsberg/R [4] and Babelsberg/JS [5].
[1] https://github.com/Z3Prover/z3
[2] https://github.com/babelsberg/pybelsberg
[3] http://opensource.org/licenses/BSD-3-Clause
[4] https://github.com/timfel/babelsberg-r
[5] https://github.com/timfel/babelsberg-js
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
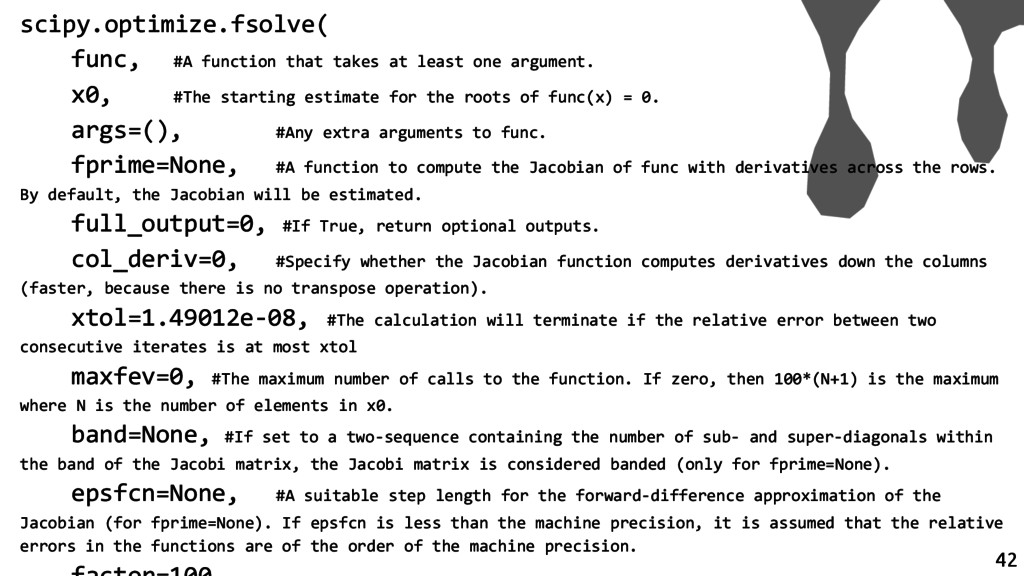
![scipy.optimize.fsolve constraint = lambda args: [ math.sqrt( (args[0]-args[1])**2 + (args[2]-args[3])**2](https://files.speakerdeck.com/presentations/6627c68db411417a9151469c1795c522/slide_42.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}