Jason Dorweiler - Assembling Sensor Networks: Experience with Building Robots
Jason Dorweiler, a roboticist & scientist, talks about the different sensors pros & cons from building various robots. His portfolio includes an autonomous RC car, follow you around Roomba, and others: http://www.transistor.io/.
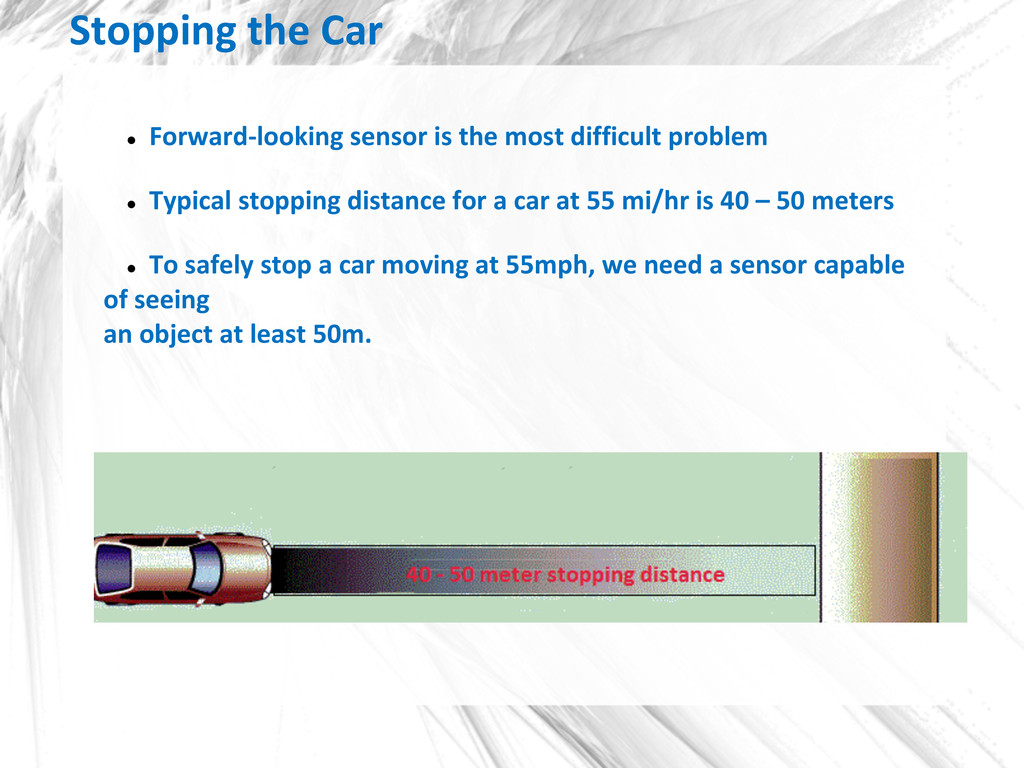
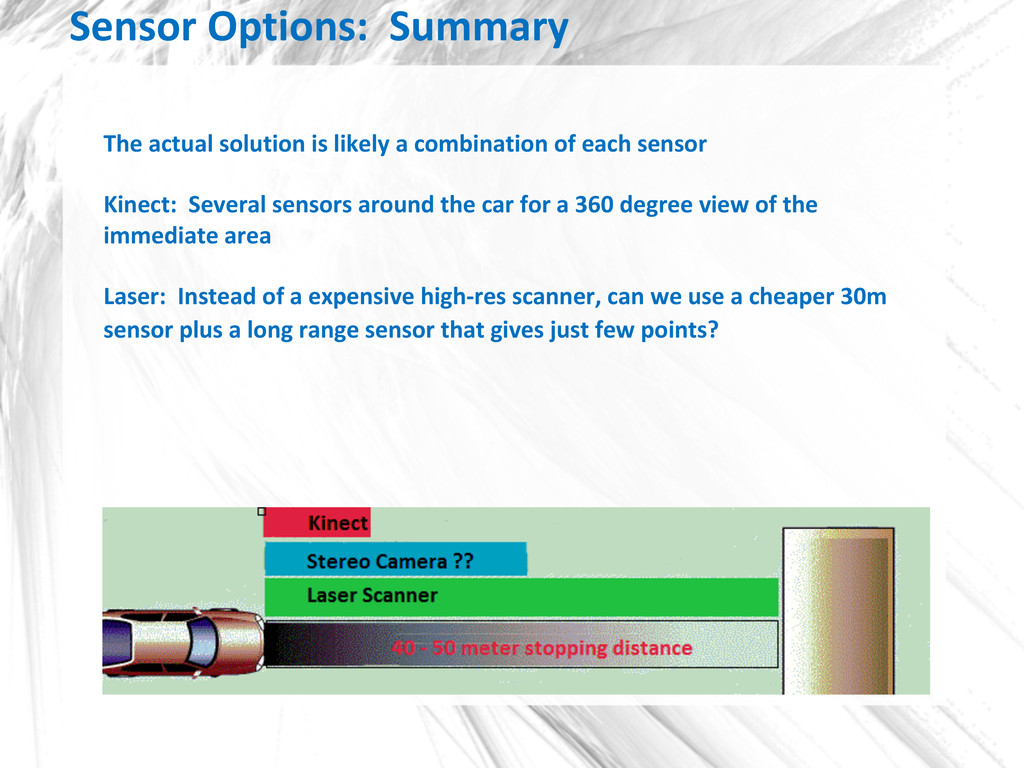
stopping distance for a car at 55 mi/hr is 40 – 50 meters • To safely stop a car moving at 55mph, we need a sensor capable of seeing an object at least 50m. Stopping the Car
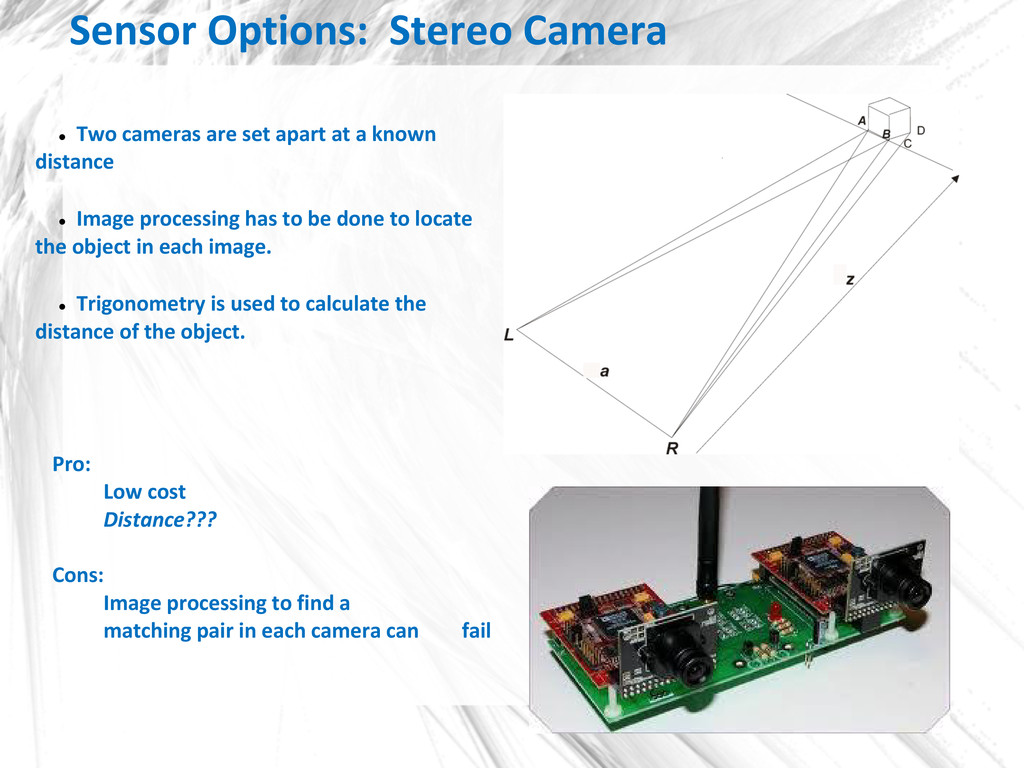
matching pair in each camera can fail Sensor Options: Stereo Camera • Two cameras are set apart at a known distance • Image processing has to be done to locate the object in each image. • Trigonometry is used to calculate the distance of the object.
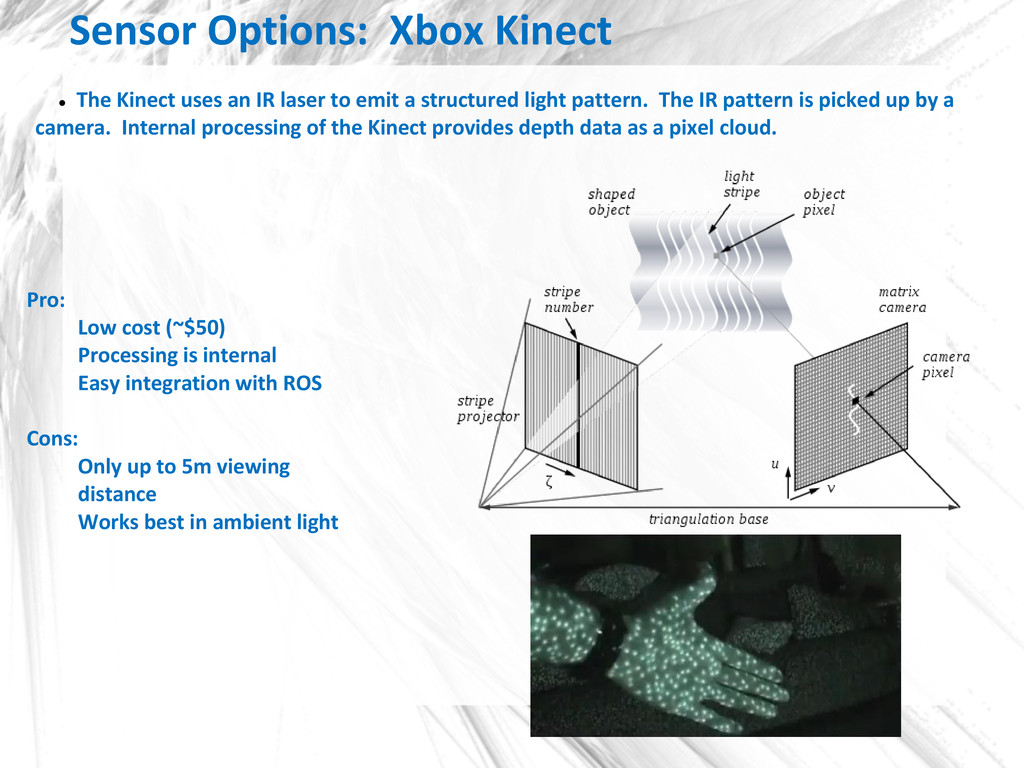
ROS Cons: Only up to 5m viewing distance Works best in ambient light • The Kinect uses an IR laser to emit a structured light pattern. The IR pattern is picked up by a camera. Internal processing of the Kinect provides depth data as a pixel cloud. Sensor Options: Xbox Kinect
capable of seeing 40-50 meter distances. Sensor Options: Laser Scanner • A laser shines a beam onto an object. The reflected light is picked up by a detector which filters out wavelengths other than that of the laser. The position of reflection on the detector is used to calculate distance.
Kinect: Several sensors around the car for a 360 degree view of the immediate area Laser: Instead of a expensive high-res scanner, can we use a cheaper 30m sensor plus a long range sensor that gives just few points? Sensor Options: Summary
CAN bus. We can use them as encoders. • GPS •We will need a GPS sensor to keep track of the car’s overall position. • Gyroscope •Used to measure the car’s angular rotation (i.e. turning). This sensor is necessary for control of the steering • Accelerometer •This sensor may be needed to correct for drift in the gyroscope's measurement Other Useful Sensors
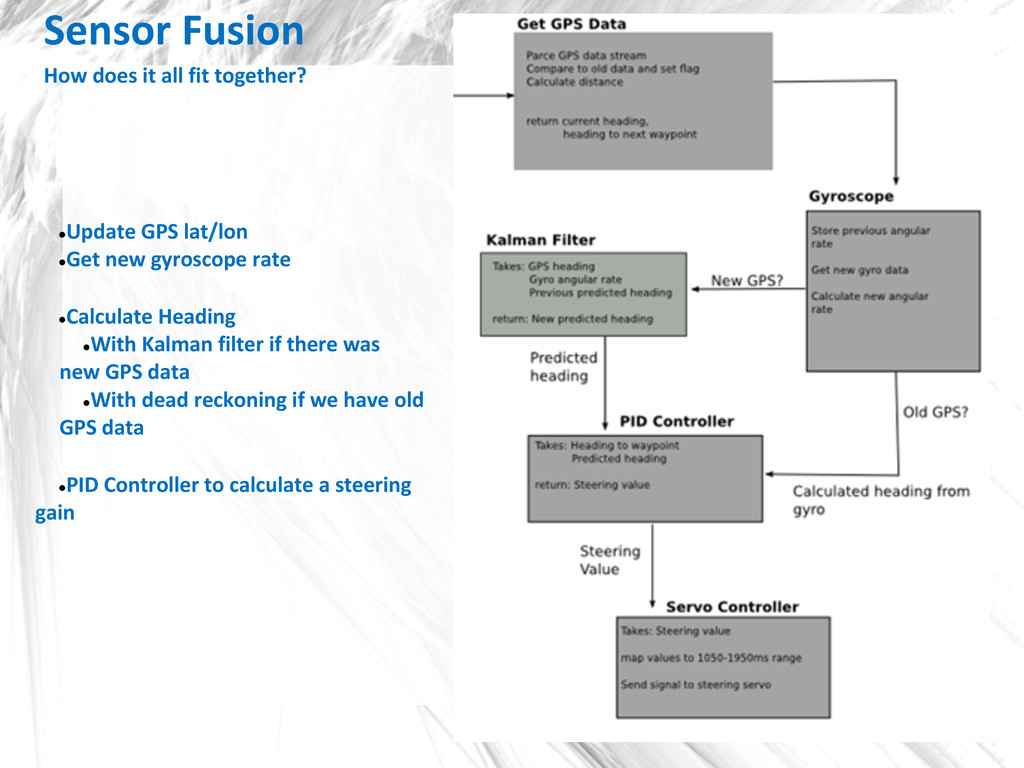
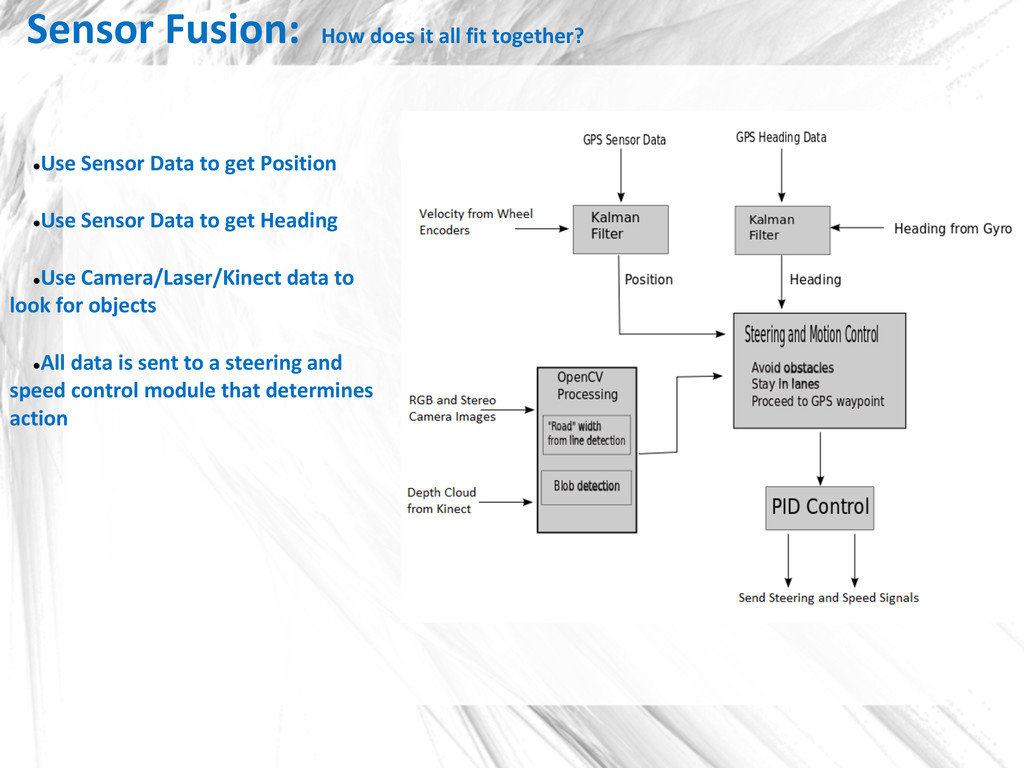
lat/lon •Get new gyroscope rate •Calculate Heading •With Kalman filter if there was new GPS data •With dead reckoning if we have old GPS data •PID Controller to calculate a steering gain
Data to get Position •Use Sensor Data to get Heading •Use Camera/Laser/Kinect data to look for objects •All data is sent to a steering and speed control module that determines action
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}