Tyler Folsom from University of Washington's Elcano project discusses the lessons he learned from building self driving vehicles. He draws upon his experiences from two teams that participated in DARPA Grand Challenge and other similar projects.
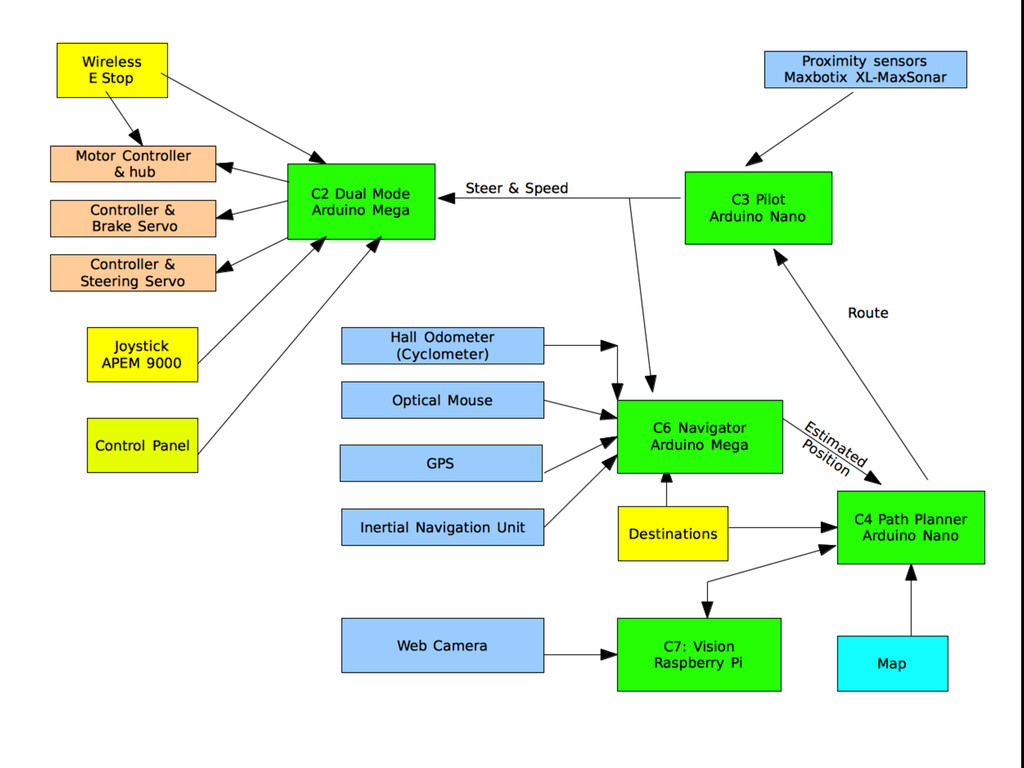
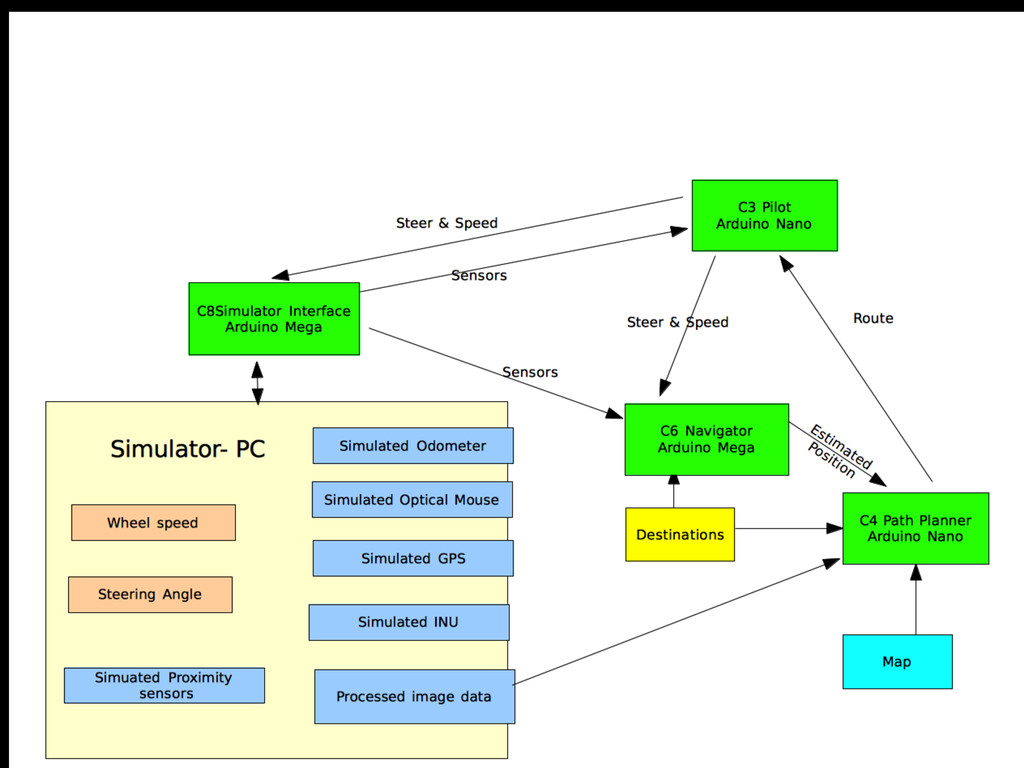
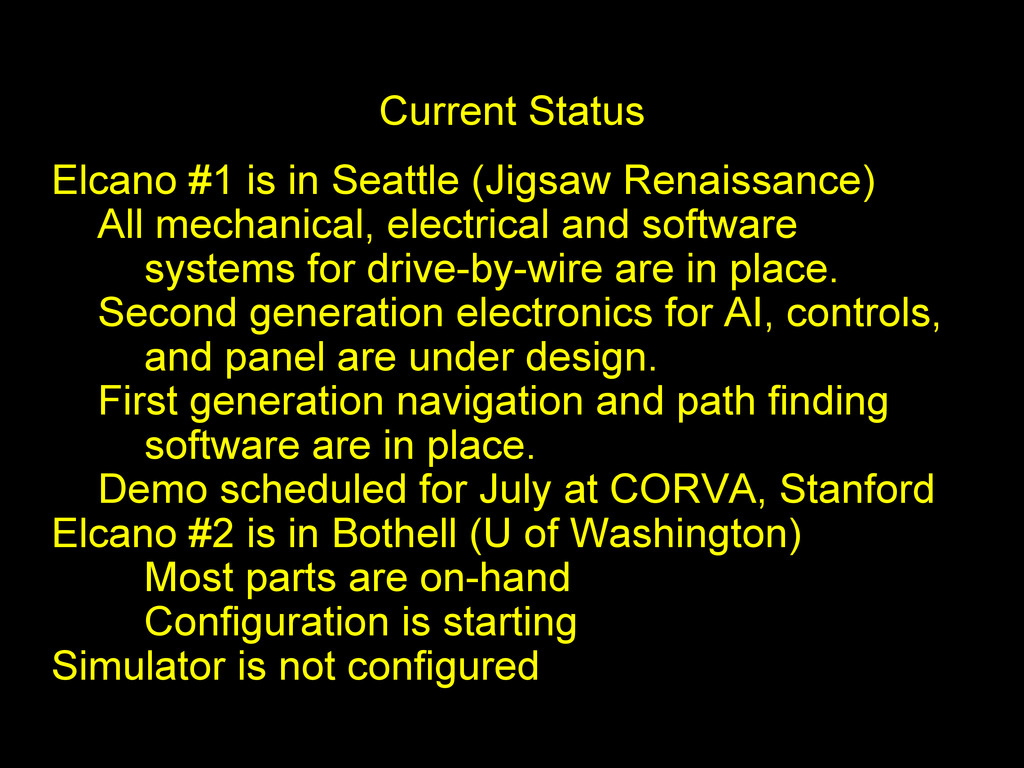
mechanical, electrical and software systems for drive-by-wire are in place. Second generation electronics for AI, controls, and panel are under design. First generation navigation and path finding software are in place. Demo scheduled for July at CORVA, Stanford Elcano #2 is in Bothell (U of Washington) Most parts are on-hand Configuration is starting Simulator is not configured
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}