(15 FPS) • 320x240 11-bit monocromo • FOV 57 • Reconocimiento de colores (RGB) • Reconocimiento facial * Cámara VGA * No implementado en el SDK (al menos de momento)
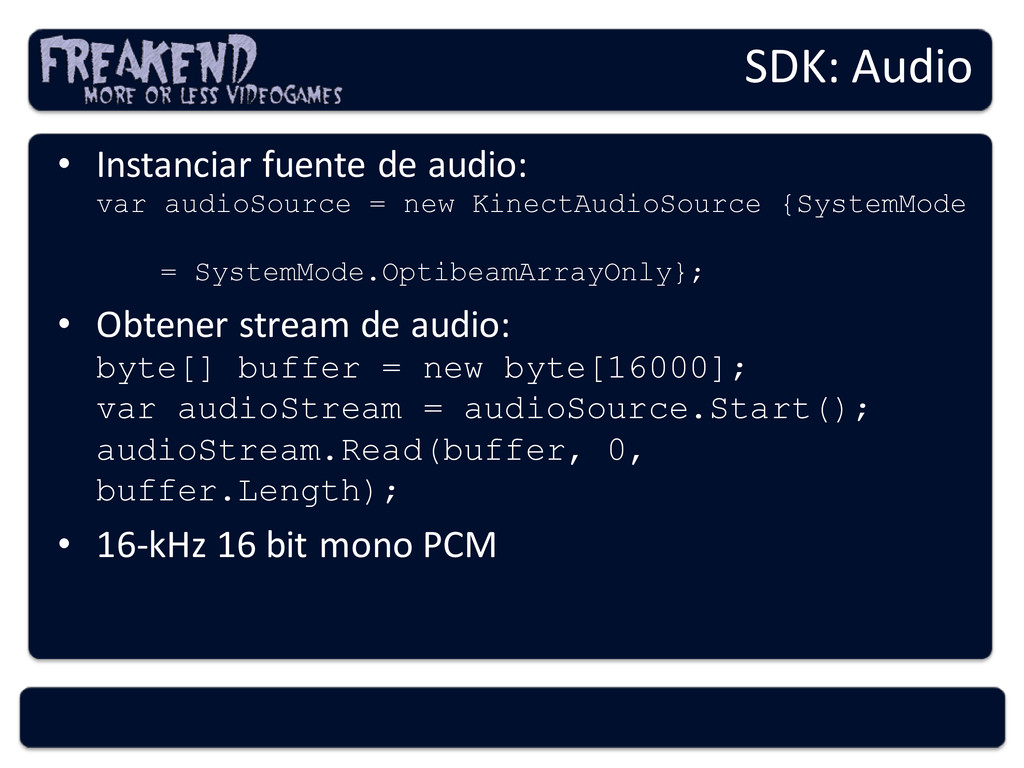
ruido ambiental y eco • Elimina ruido del propio videojuego • Permite obtener la dirección del sonido • Puedes dar comandos de voz – Pensado para la consola – Pero en Windows se puede usar la Speech API Micrófono
para “aprender” a reconocer objetos • Reconocimiento facial – Requiere training para cada usuario • Reconocimiento de gestures • Reconocimiento de voces Software * No implementado en el SDK (al menos de momento)
frames: kinect.DepthFrameReady += DepthFrame; • Código más complejo, pero básicamente: • Stream de 320x240 o 80x60 • Depth: Arrays de int16 – 13 high bits: profundidad (mm) – 3 low bits: player index (0 = fondo/No player) SDK: Depth
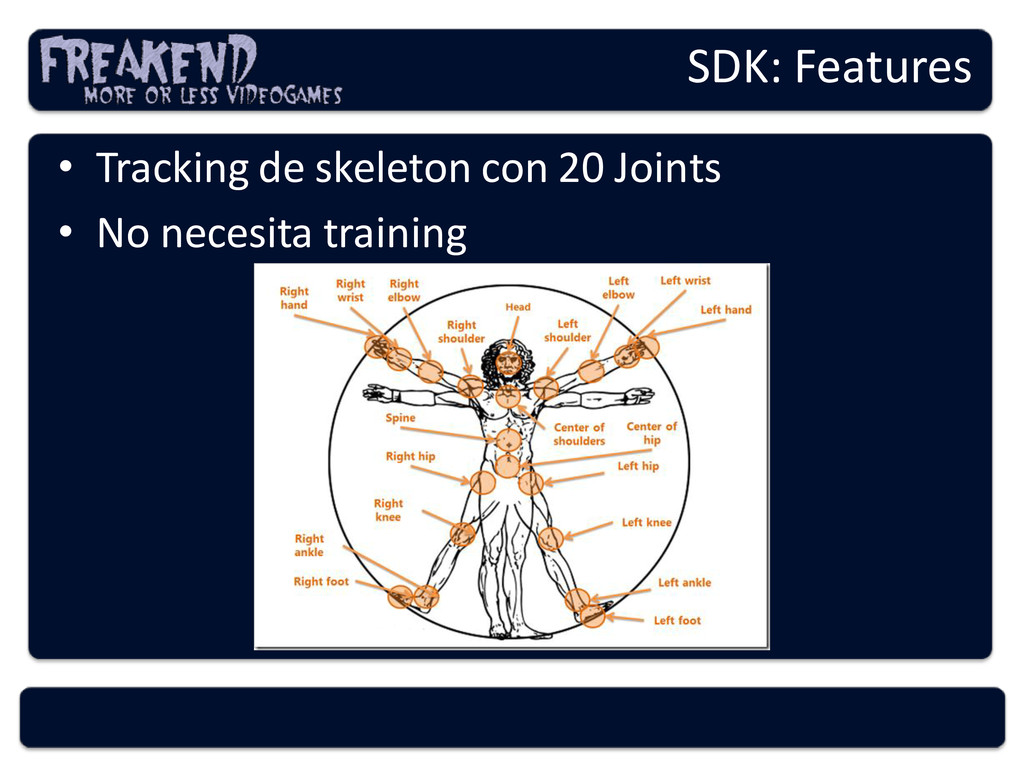
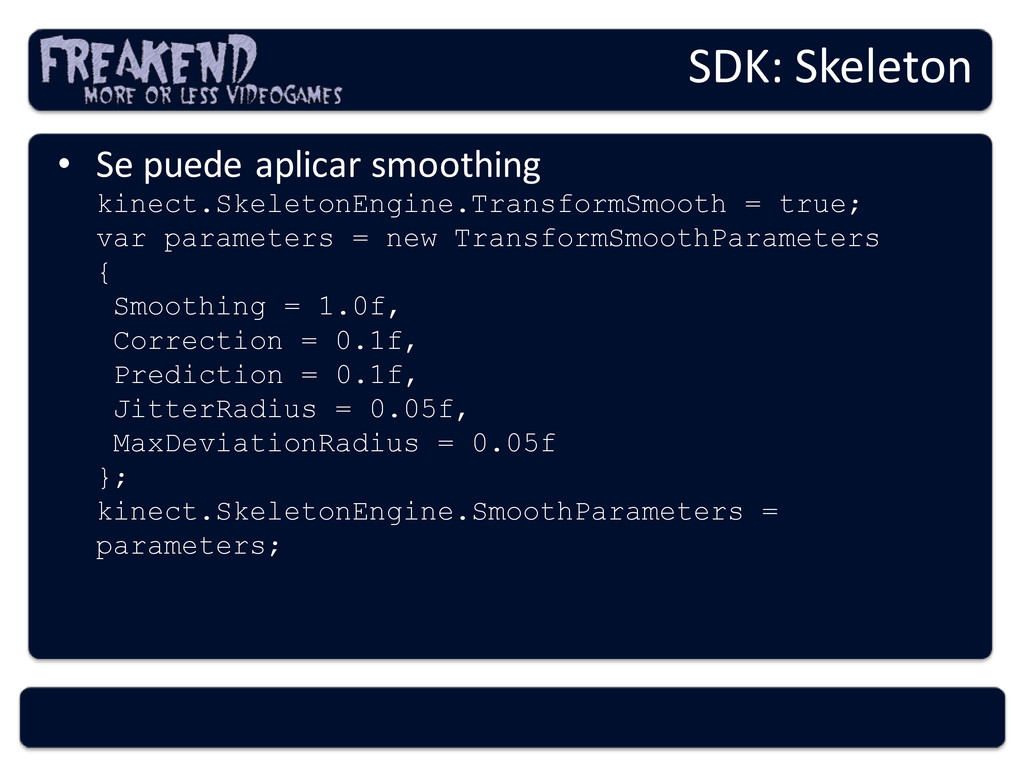
• Enum de Joint IDs: Microsoft.Research.Kinect.Nui.JointID • Joint: Vector4 (x, y, z, q) – Z: Dist. del sensor. Regla de la mano derecha. – q: Quality [0,1] (parecido a la precisión) • Cada Skeleton tiene un TrackingID fijo • Max. 2 Skeletons de momento en el SDK SDK: Skeleton
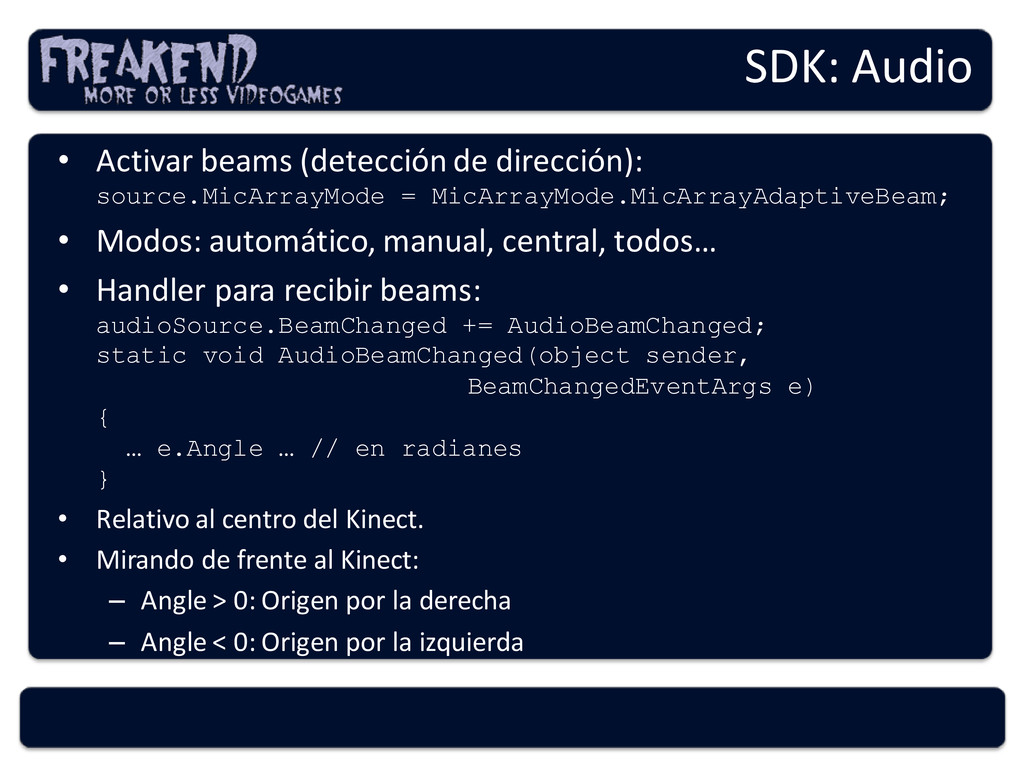
Modos: automático, manual, central, todos… • Handler para recibir beams: audioSource.BeamChanged += AudioBeamChanged; static void AudioBeamChanged(object sender, BeamChangedEventArgs e) { … e.Angle … // en radianes } • Relativo al centro del Kinect. • Mirando de frente al Kinect: – Angle > 0: Origen por la derecha – Angle < 0: Origen por la izquierda SDK: Audio
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}