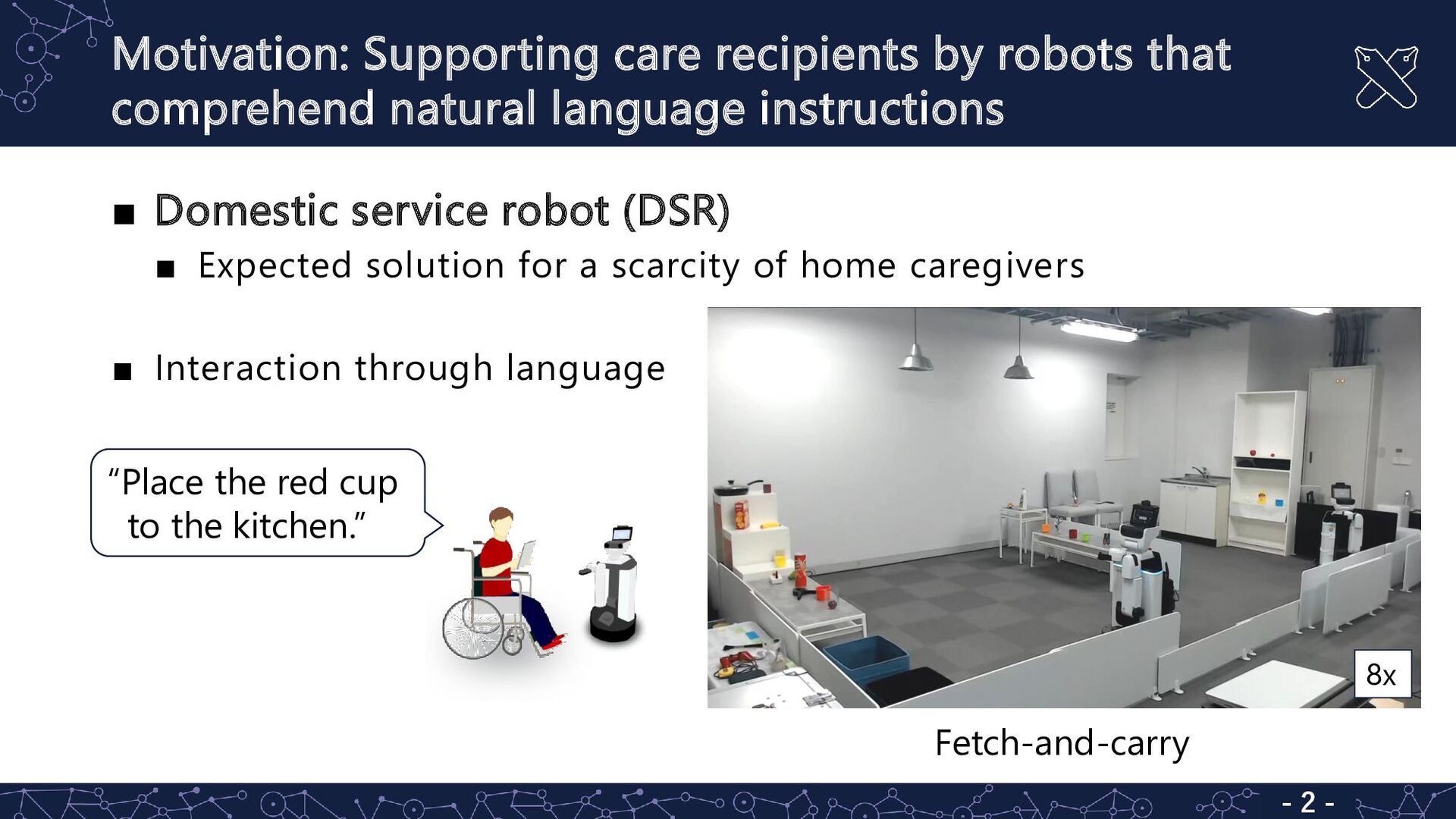
instructions - 2 - Fetch-and-carry ▪ Domestic service robot (DSR) ▪ Expected solution for a scarcity of home caregivers ▪ Interaction through language “Place the red cup to the kitchen.” 8x
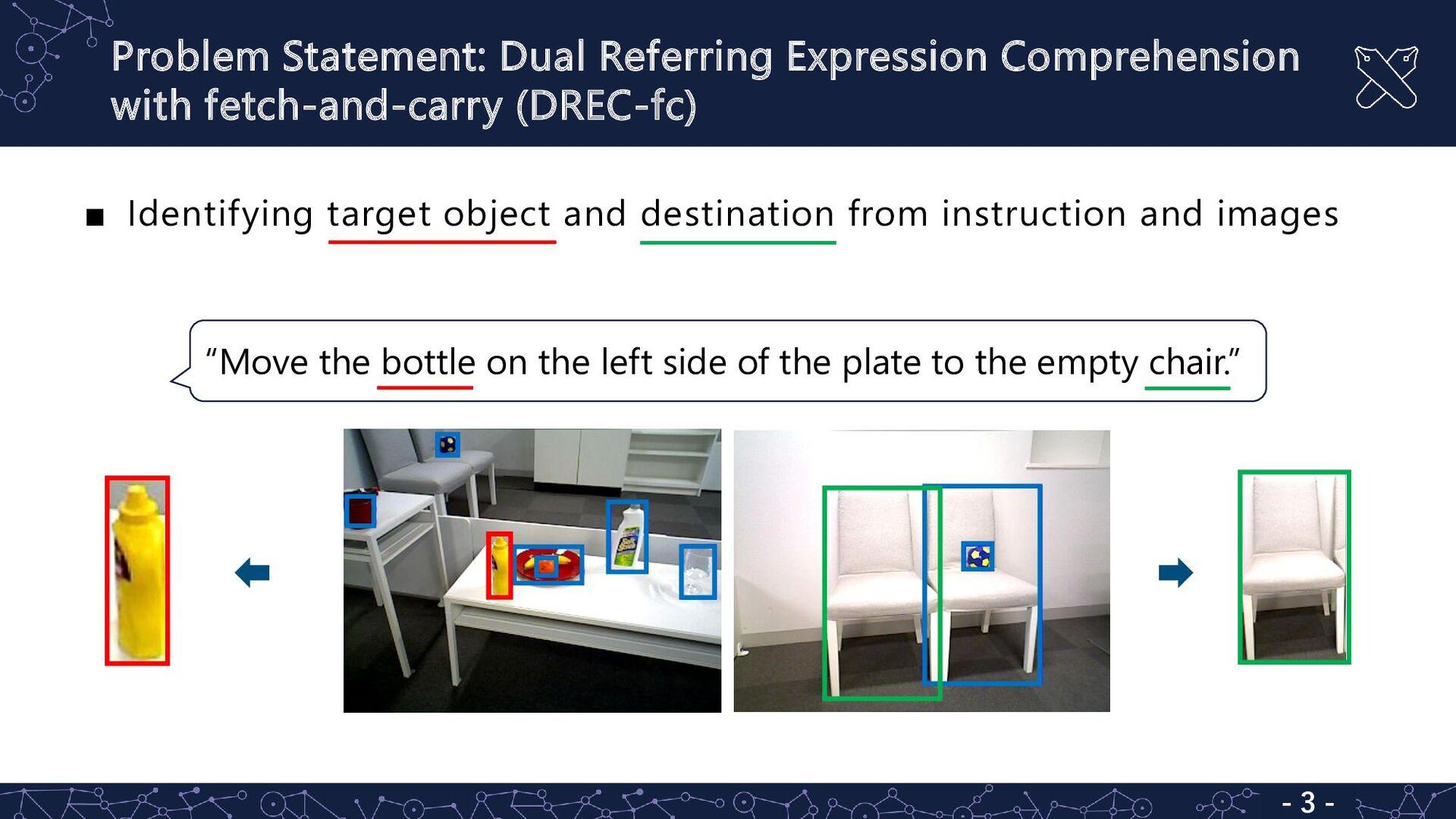
Problem Statement: Dual Referring Expression Comprehension with fetch-and-carry (DREC-fc) - 3 - “Move the bottle on the left side of the plate to the empty chair.”
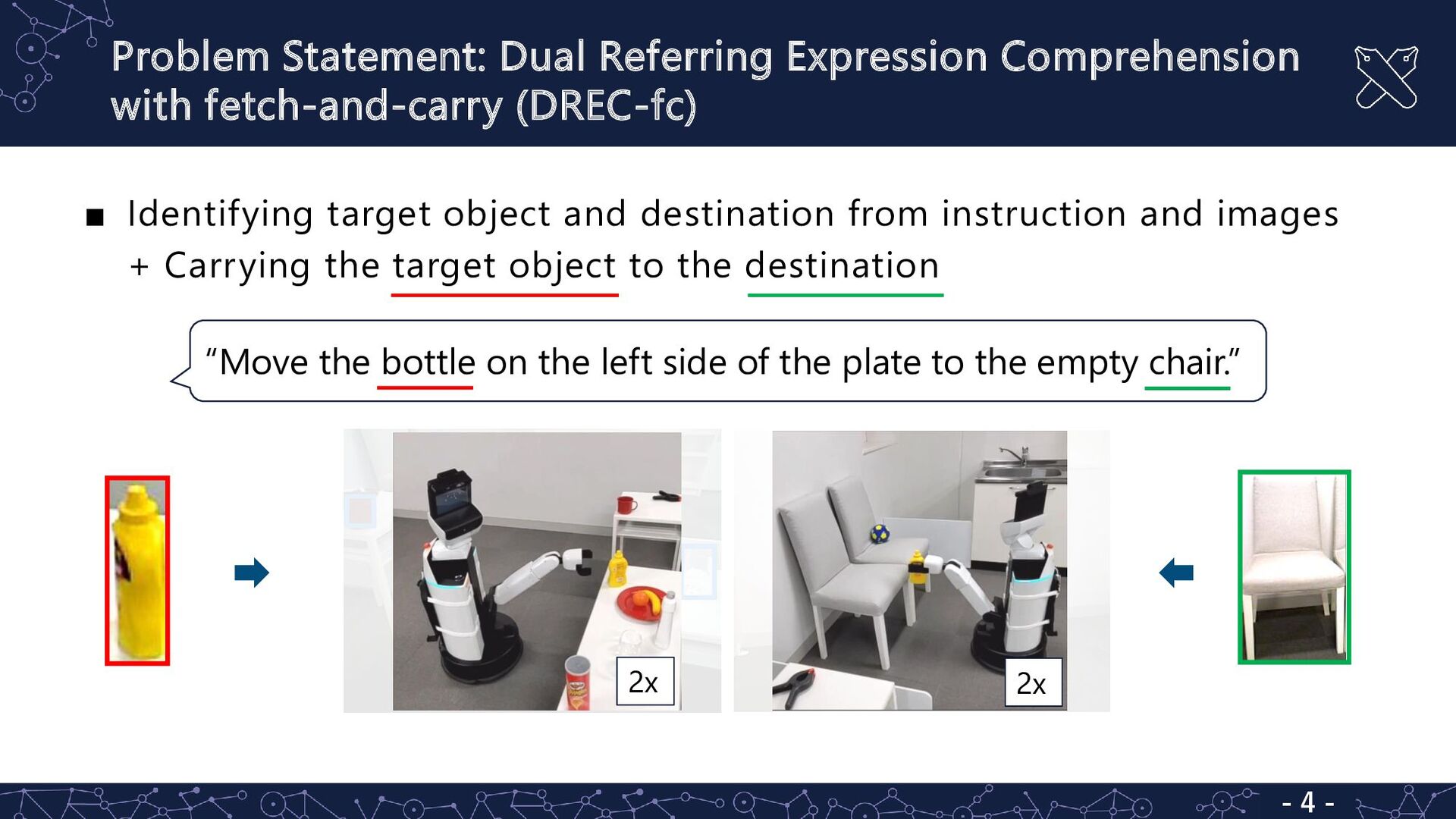
+ Carrying the target object to the destination Problem Statement: Dual Referring Expression Comprehension with fetch-and-carry (DREC-fc) - 4 - 2x 2x “Move the bottle on the left side of the plate to the empty chair.”
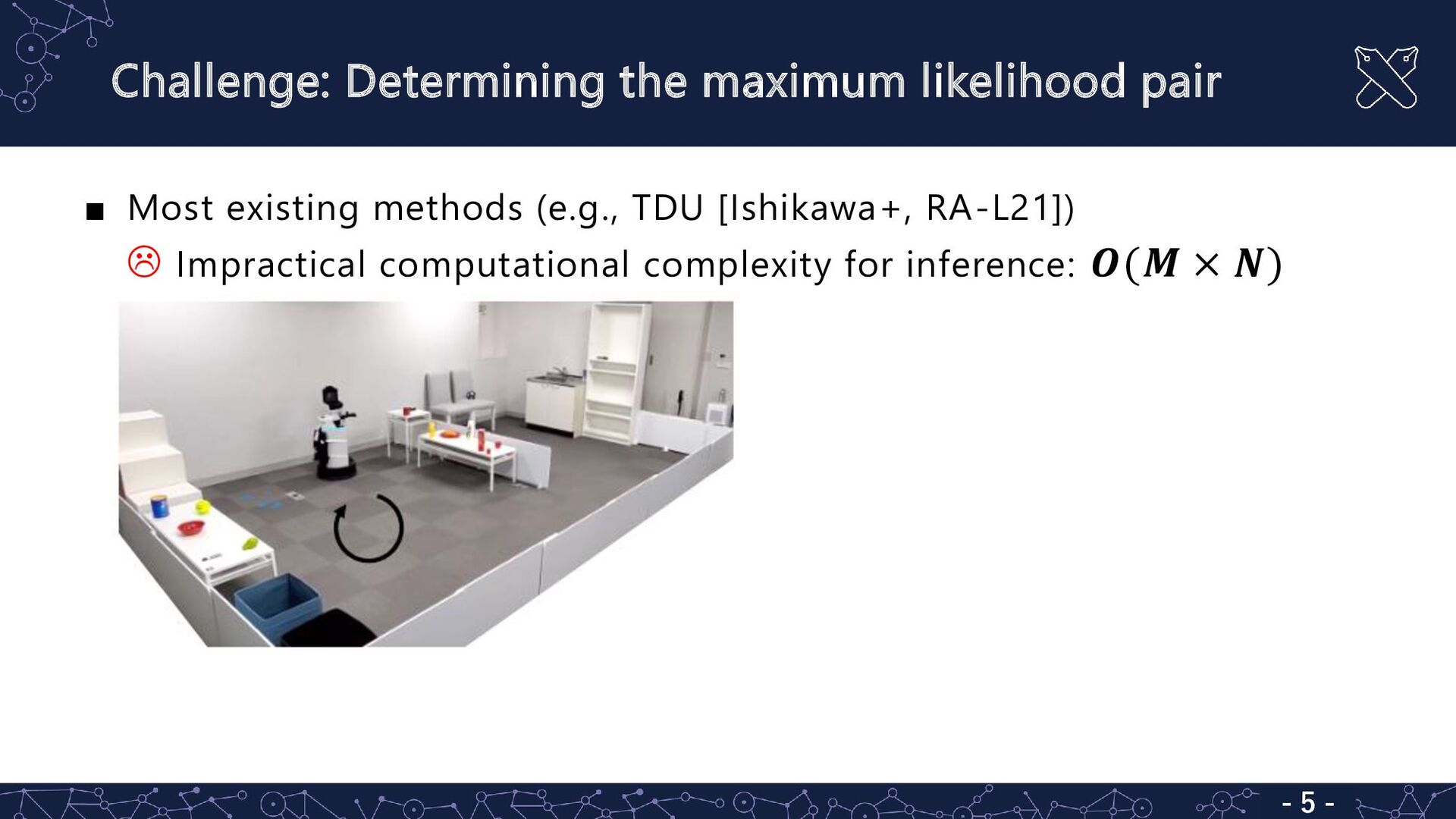
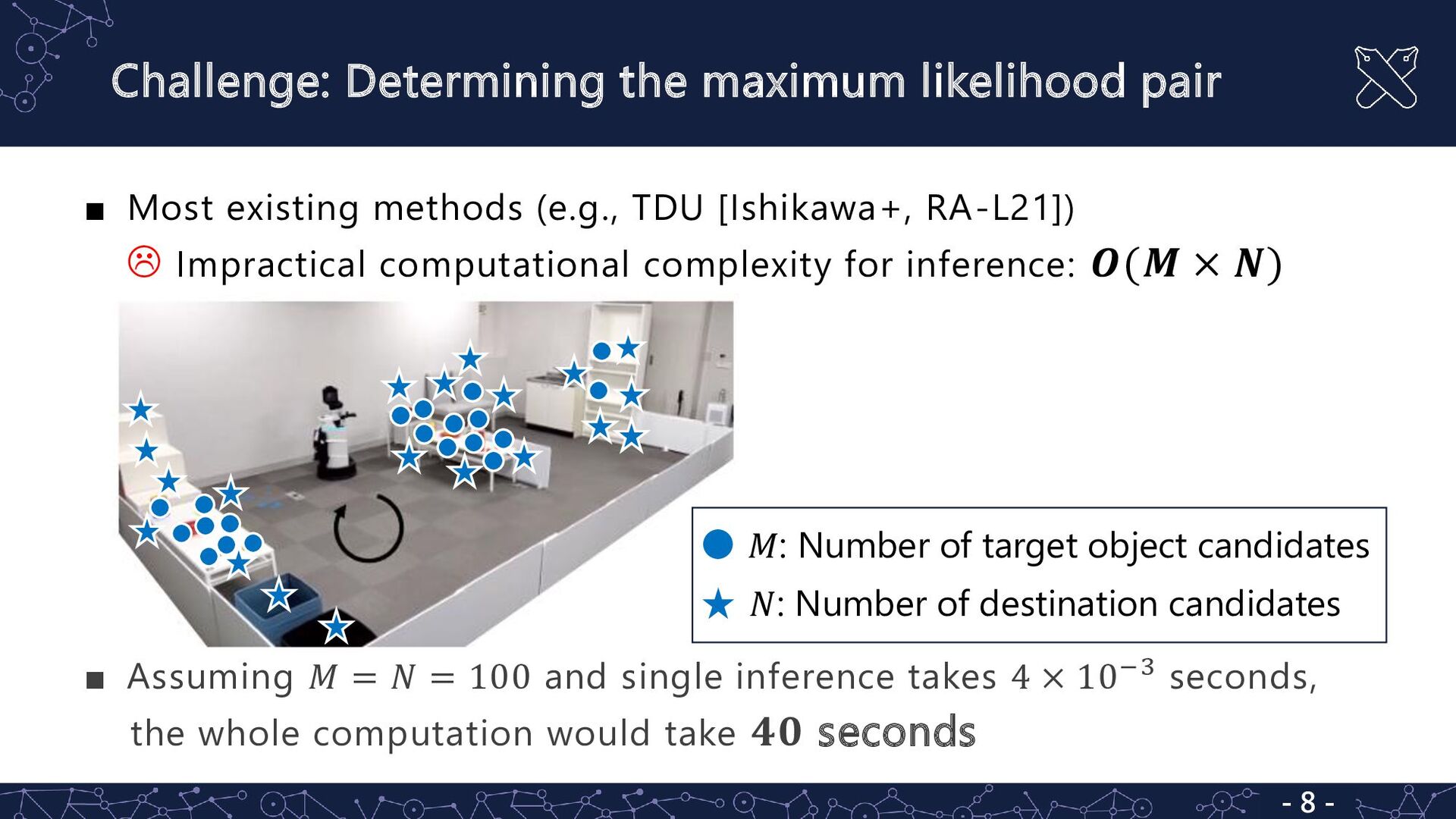
(e.g., TDU [Ishikawa+, RA-L21]) Impractical computational complexity for inference: 𝑶(𝑴 × 𝑵) ▪ Assuming 𝑀 = 𝑁 = 100 and single inference takes 4 × 10−3 seconds, the whole computation would take 𝟒𝟎 seconds - 8 - 𝑀: Number of target object candidates 𝑁: Number of destination candidates
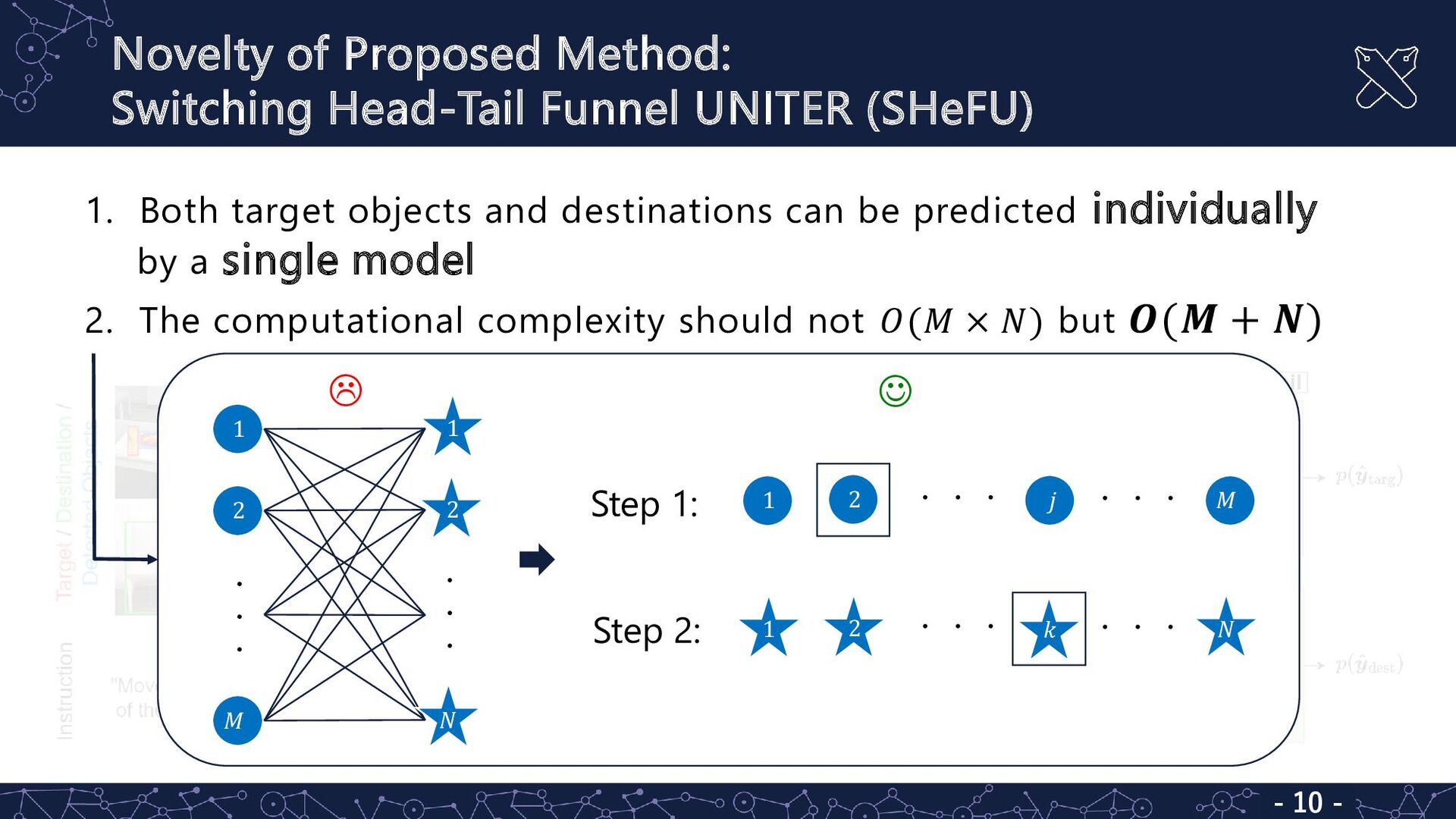
9 - 1. Both target objects and destinations can be predicted individually by a single model 2. The computational complexity should not 𝑂(𝑀 × 𝑁) but 𝑶(𝑴 + 𝑵)
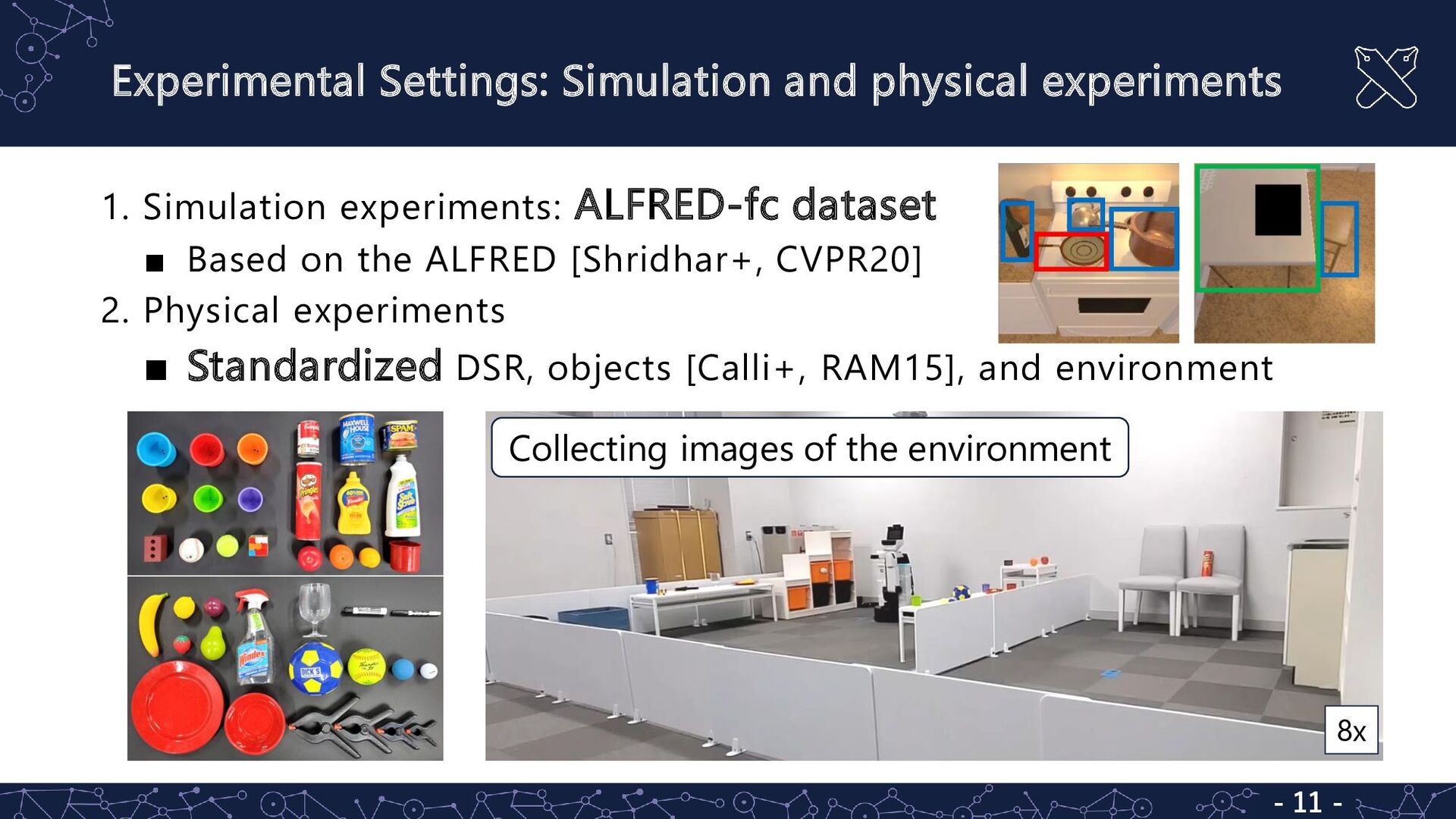
Collecting images of the environment 1. Simulation experiments: ALFRED-fc dataset ▪ Based on the ALFRED [Shridhar+, CVPR20] 2. Physical experiments ▪ Standardized DSR, objects [Calli+, RAM15], and environment
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}