concept in many applications. E.g. The theory of optimal transport provides a particular useful metric used in Image processing; Machine learning; Game theory, including Mean field games; Numerics and modeling for gradient or Hamiltonian type PDEs. 2
some dirts with shape X, density ρ0(x) to another shape Y with density ρ1(y)? The question leads to the definition of Earth Mover’s distance or Wasserstein metric. The problem is first considered by Monge in 1781, then relaxed by Kantorovich in 1940s. So it is usually named Monge-Kantorovich problem. 3
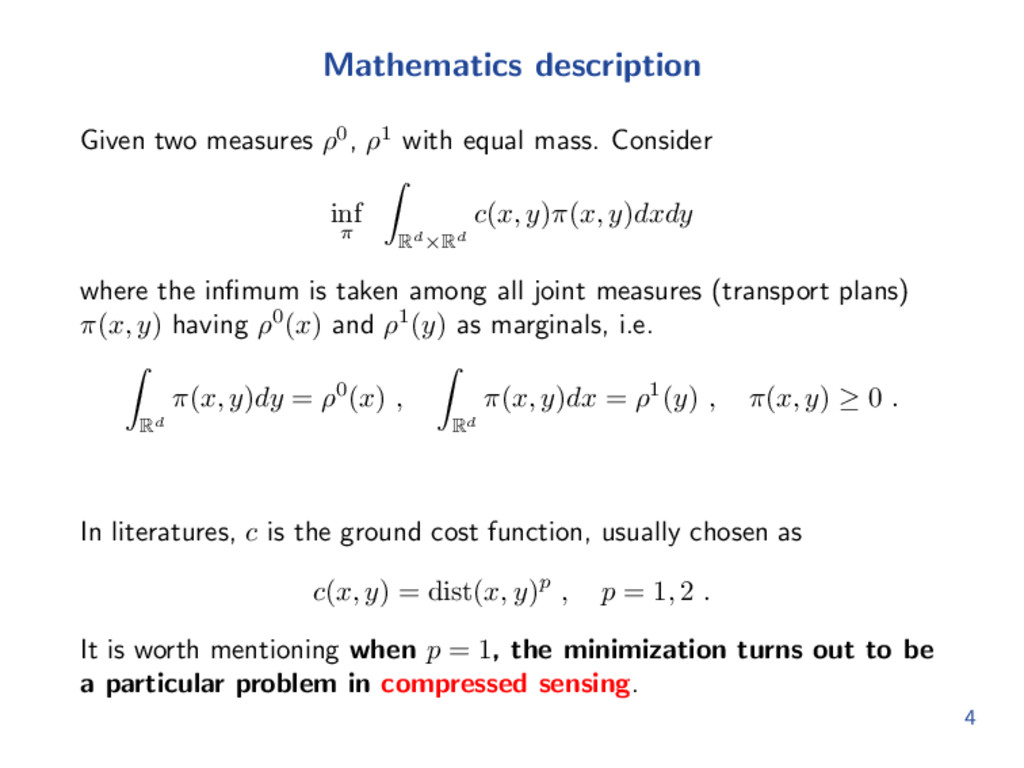
Consider inf π Rd×Rd c(x, y)π(x, y)dxdy where the infimum is taken among all joint measures (transport plans) π(x, y) having ρ0(x) and ρ1(y) as marginals, i.e. Rd π(x, y)dy = ρ0(x) , Rd π(x, y)dx = ρ1(y) , π(x, y) ≥ 0 . In literatures, c is the ground cost function, usually chosen as c(x, y) = dist(x, y)p , p = 1, 2 . It is worth mentioning when p = 1, the minimization turns out to be a particular problem in compressed sensing. 4
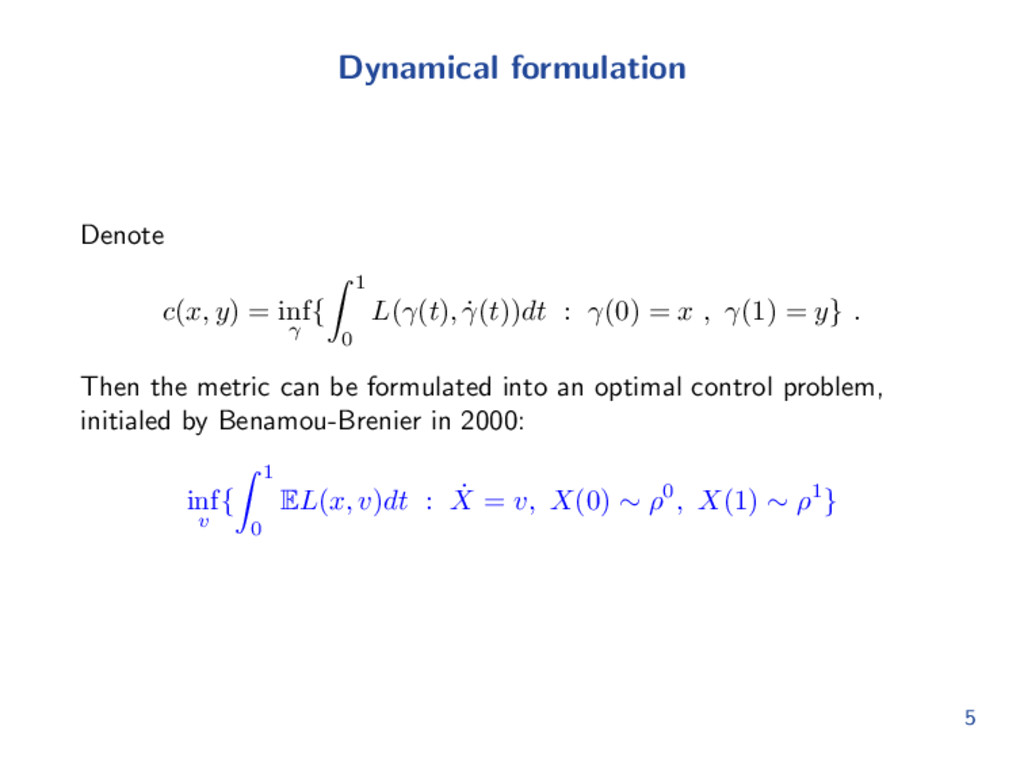
0 L(γ(t), ˙ γ(t))dt : γ(0) = x , γ(1) = y} . Then the metric can be formulated into an optimal control problem, initialed by Benamou-Brenier in 2000: inf v { 1 0 EL(x, v)dt : ˙ X = v, X(0) ∼ ρ0, X(1) ∼ ρ1} 5
−∇V (xt )dt . Its transition density satisfies ∂ρ ∂t = ∇ · (ρ∇V (x)) . In Euclidean metric, the ODE is the gradient flow of min x∈Rd V (x) . In 2-Wasserstein metric, the PDE is the gradient flow of min ρ(x)∈P(Rd) Rd V (x)ρ(x)dx . In Villani’s word: The density of gradient flow is the gradient flow in density space. 6
whose density function satisfies the Fokker-Planck equation, heat equation ∂ρ ∂t = ∇ · (∇ρ) = ∇ · (ρ∇ log ρ) . From the optimal transport metric, the heat equation is a gradient flow of H(ρ) = Rd ρ(x) log ρ(x)dx . Boltzmann-Shannon entropy Moreover, this gradient flow understanding connects the crucial information functional, Fisher information I(ρ) = Rd (∇ log ρ(x))2ρ(x)dx = − d dt H(ρ(t)) . 7
Lott, Strum, Gangbo, Jordan, Evans, Brenier, Benamou, Ambrosio, Gigli, Savare and many more. In this talk, we consider similar matters on discrete states. On a finite graph, we plan to Propose a L1 , L2 Wasserstein metric; Establish and Analyze gradient flows for modeling and numerics. Applications: Images processing (Compute the metric and movie among two images); Evolutionary games; Numerical schemes; “Geometry” of finite graphs. 8
V = {1, · · · , n}, E is the edge set. Probability set P(G) = {(ρi )n i=1 | n i=1 ρi = 1, ρi ≥ 0}. Discrete free energy F(ρ) = 1 2 n i=1 n j=1 wij ρi ρj + n i=1 vi ρi +β n i=1 ρi log ρi , Boltzmann-Shannon entropy where (wij )1≤i,j≤n , (vi )n i=1 are given constant symmetric matrix, vector. 10
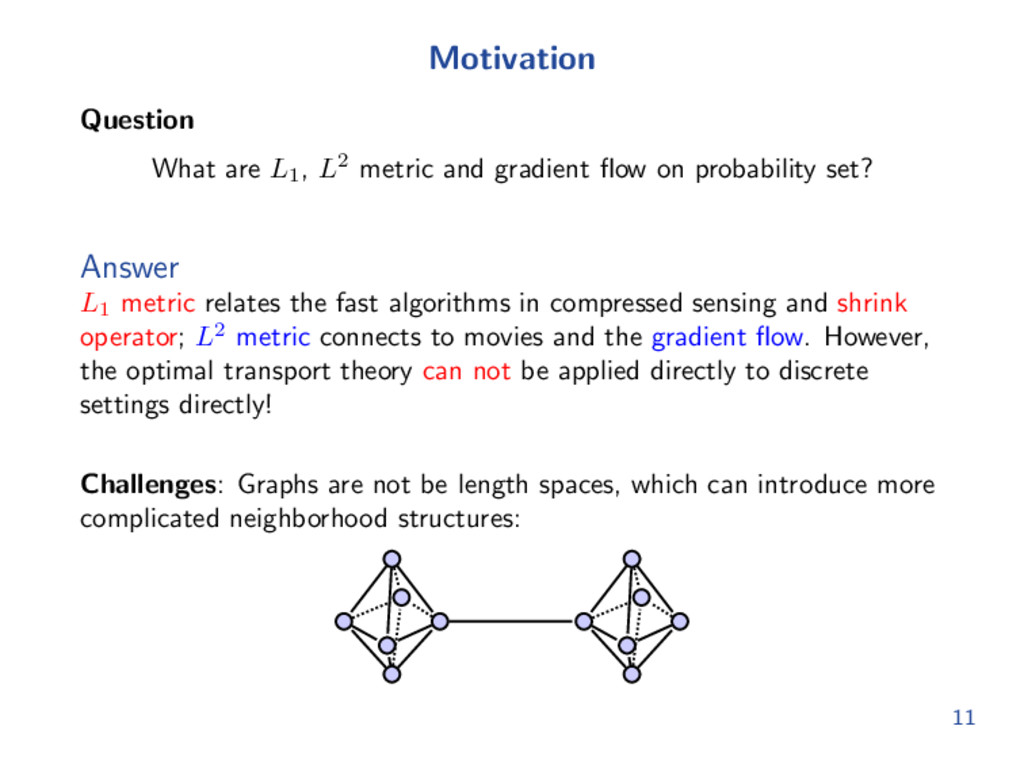
flow on probability set? Answer L1 metric relates the fast algorithms in compressed sensing and shrink operator; L2 metric connects to movies and the gradient flow. However, the optimal transport theory can not be applied directly to discrete settings directly! Challenges: Graphs are not be length spaces, which can introduce more complicated neighborhood structures: 11
L2 metric+gradient flow’s derivation is motived by The work by Jordan, Kinderlehrer, and Otto 1. Benamou-Brenier formula. Convergence result is connected to Villani’s Open problem Find a nice formula for the Hessian of the functional F(ρ).2 1The variational formulation of the Fokker-Planck equation, 1998. 2Problem 15.11 in his book: Optimal transport, old and new, 2008. 12
= ρv and discrete them on the edge of graph. Then L1 problem forms minimize m m 1 + 2 m 2 2 subject to divG (m) + p1 − p0 = 0 . where is a regularization term. It is a particular example of compressed sensing. Rewrite x := m, A := divG and b := p0 − p1, then min x x 1 s.t. Ax = b . We solve it similarly by Primal-Dual algorithm (Chambolle and Pock). 14
= 1, 2, · · · Iterates until convergence 2. mk+1 i+ ev 2 = 1 1+ µ shrink(mk i+ ev 2 + µ∇G Φk i+ ev 2 , µ) ; 3. Φk+1 i = Φk i + τ{divG (mk+1 i + θ(mk+1 i − mk i )) + p1 i − p0 i } ; 4. End Here the shrink operator is for the Manhattan metric: shrink(y, α) := y |y| max{|y| − α, 0} , where y ∈ R1 . 15
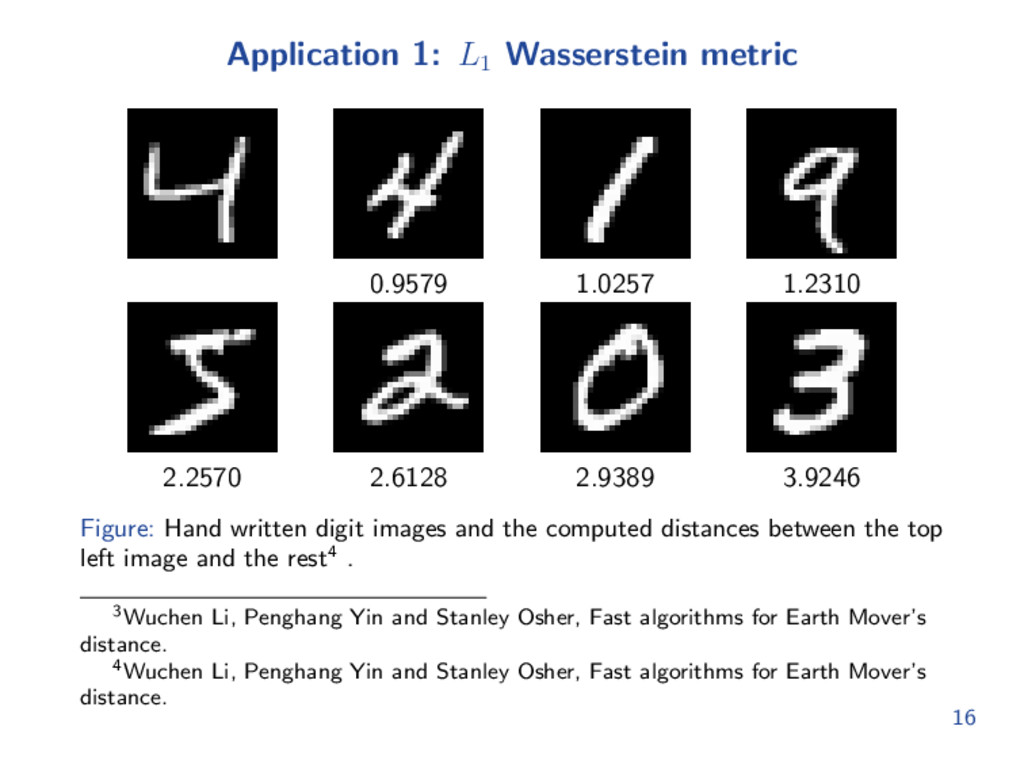
2.9389 3.9246 Figure: Hand written digit images and the computed distances between the top left image and the rest4 . 3Wuchen Li, Penghang Yin and Stanley Osher, Fast algorithms for Earth Mover’s distance. 4Wuchen Li, Penghang Yin and Stanley Osher, Fast algorithms for Earth Mover’s distance. 16
the minimizer of regularized problem inf m { Ω m(x) + 2 m(x) 2dx : ∇ · m(x) + ρ1(x) − ρ0(x) = 0} , satisfies a nice (formal) system m(x) = 1 (∇Φ(x) − ∇Φ(x) |∇Φ(x)| ) , 1 (∆Φ(x) − ∇ · ∇Φ(x) |∇Φ(x)| ) = ρ0(x) − ρ1(x) , where the second equation holds when |∇Φ| ≥ 1. Notice that the term ∇ · ∇Φ(x) |∇Φ(x)| is the mean curvature formula. 17
{ 1 0 (v, v)ρ dt : ∂ρ ∂t + ∇ · (ρv) = 0, ρ(0) = ρ0, ρ(1) = ρ1}, The metric has a differentiable structure. One needs to discrete it carefully. It is natural to define a vector field on a graph v = (vij )(i,j)∈E , satisfying vij = −vji . Next, we are going to define a discrete version of inner product and divergence operator w.r.t a probability measure ρ: ∇ · (ρv). These notations are the key components. 18
graph w.r.t a probability measure ρ ∈ Po (G) (v, v)ρ := 1 2 (i,j)∈E v2 ij gij (ρ). Divergence of v w.r.t ρ ∈ Po (G) divG (ρv) := − j∈N(i) vij gij (ρ) n i=1 . Here gij is a special chosen function on the edge set (not unique). E.g. gij = ρi + ρj 2 . Above definitions keep the discrete integration by parts. 19
propose a new 2-Wasserstein metric on the set of all positive probability measures. L2-Wasserstein metric on a graph For any ρ0, ρ1 ∈ Po (G), we define a metric (W2 (ρ0, ρ1))2 := inf v 1 0 (v, v)ρ dt , where the infimum is taken among all vector fields v on a graph, s.t. dρ dt + divG (ρv) = 0 , ρ(0) = ρ0 , ρ(1) = ρ1 . 20
v on Rd w.r.t Lebesgue measure: v(x) = ∇φ(x) + u(x). Gradient Divergence free Consider a potential vector field of a “scalar-valued function” on a graph ∇G Φ := (Φi − Φj )(i,j)∈E , where Φ = (Φi )i∈V . New Hodge decompostion on a graph w.r.t. any measure ρ: v = ∇G Φ + u Gradient Divergence free where the divergence free on a graph means divG (ρu) = 0. 21
ρ1))2 = inf ∇GΦ 1 0 (∇G Φ, ∇G Φ)ρ dt, where the infimum is taken among all potential vector fields ∇G Φ on a graph, s.t. dρ dt + divG (ρ∇G Φ) = 0, ρ(0) = ρ0, ρ(1) = ρ1. This understanding will lead us to derive the gradient flow! 5Ambrosio, Gigli, Savare, “Gradient Flows in metric spaces and in the space of probability measures”, 2008. 22
finite graph G = (V, E) and a constant β > 0. The gradient flow of discrete free energy F(ρ) = 1 2 n i=1 n j=1 wij ρi ρj + n i=1 vi ρi + β n i=1 ρi log ρi on the metric space (Po (G), W2 ) is dρi dt = j∈N(i) ( ∂ ∂ρj F − ∂ ∂ρi F)gij (ρ) , for any i ∈ V . 23
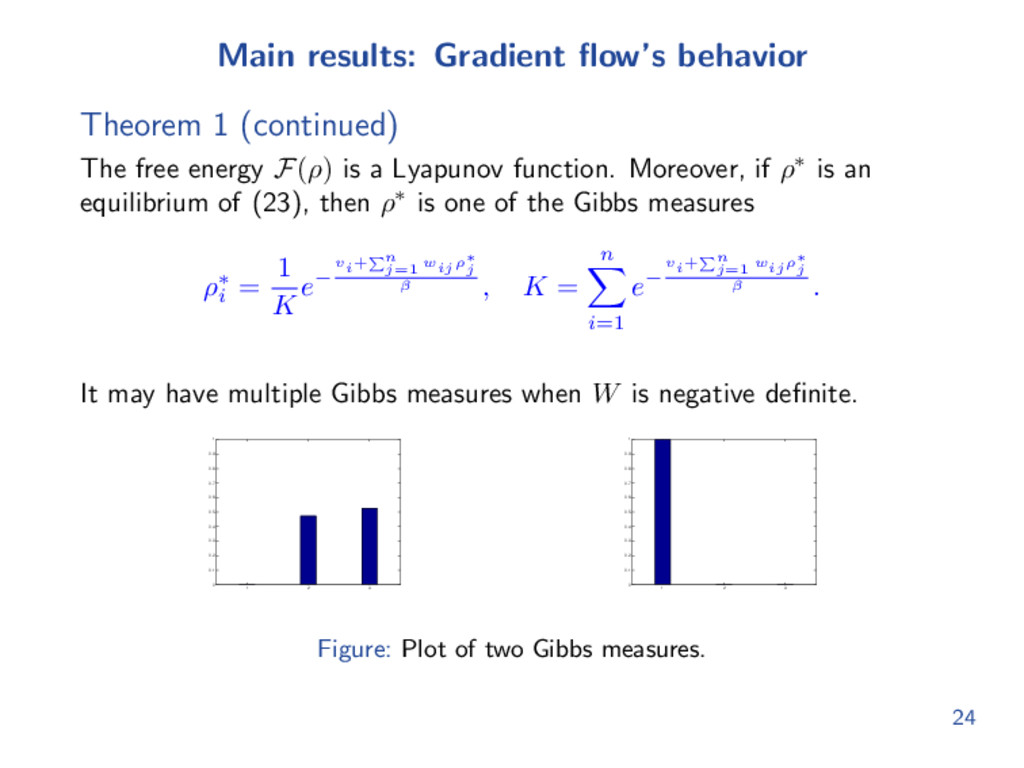
energy F(ρ) is a Lyapunov function. Moreover, if ρ∗ is an equilibrium of (23), then ρ∗ is one of the Gibbs measures ρ∗ i = 1 K e− vi+ n j=1 wij ρ∗ j β , K = n i=1 e− vi+ n j=1 wij ρ∗ j β . It may have multiple Gibbs measures when W is negative definite. 1 2 3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1 2 3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Figure: Plot of two Gibbs measures. 24
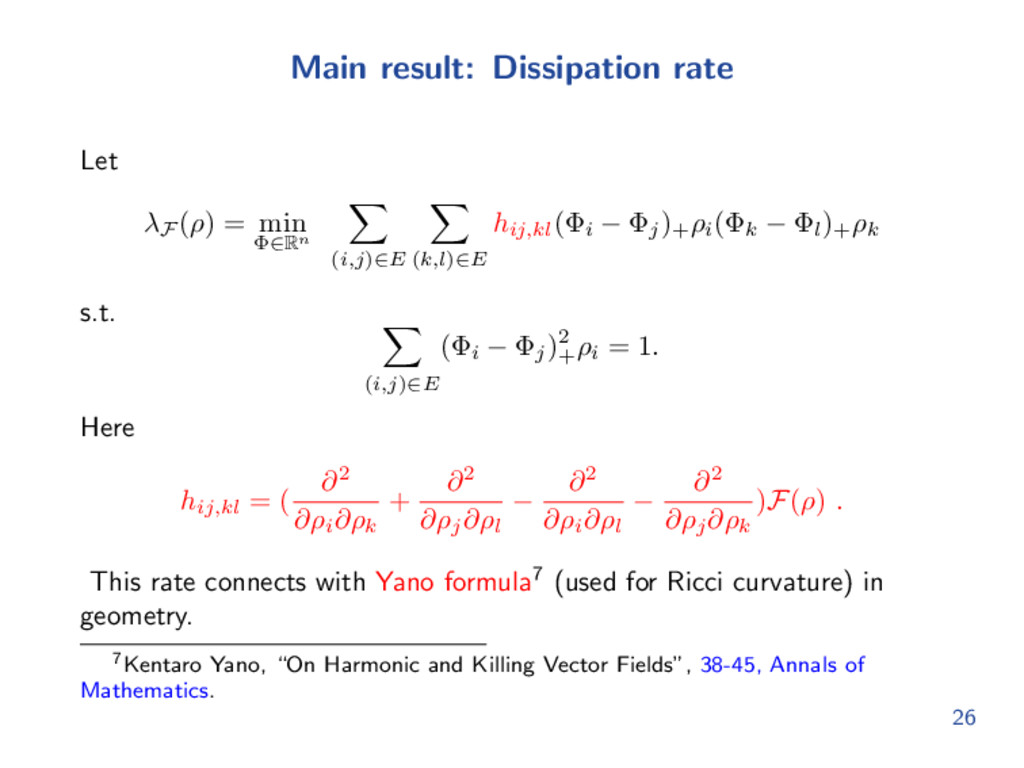
measure? Motivation Entropy dissipation: Carrillo, McCann and Villani’s work6 for nonlinear Fokker-Planck equations on Rd; Gradient flows: dynamical systems viewpoint! 6Carrillo, McCann and Villani, “Kinetic equilibration rates for granular media and related equations: entropy dissipation and mass transportation estimates”, 2003. 25
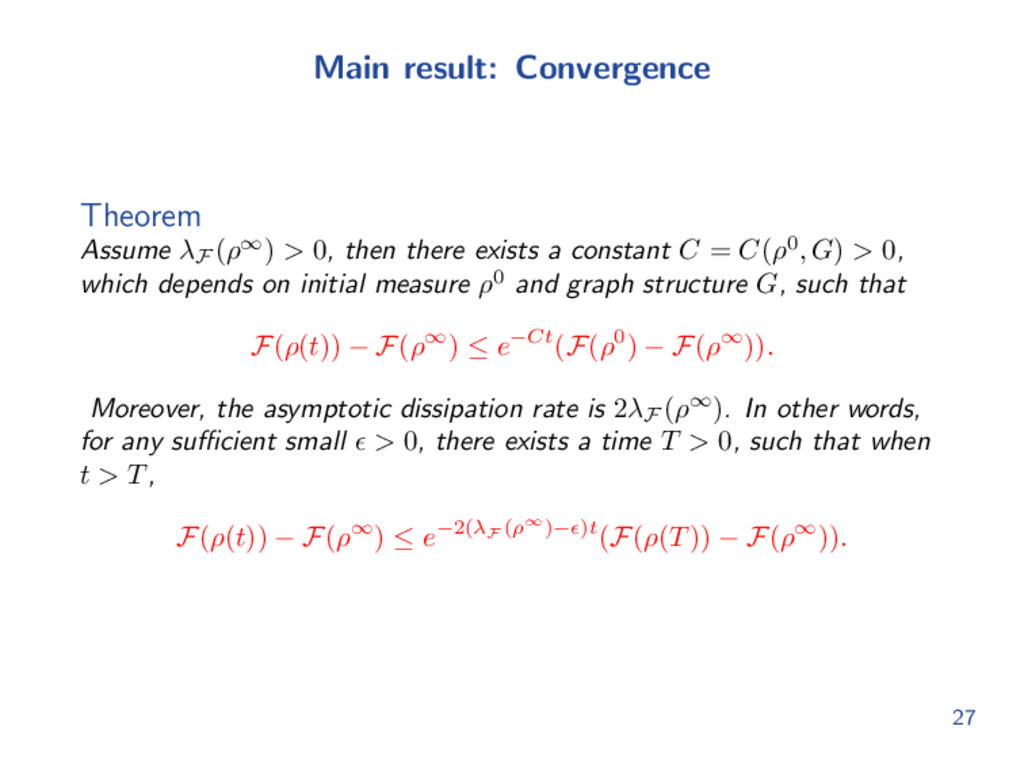
there exists a constant C = C(ρ0, G) > 0, which depends on initial measure ρ0 and graph structure G, such that F(ρ(t)) − F(ρ∞) ≤ e−Ct(F(ρ0) − F(ρ∞)). Moreover, the asymptotic dissipation rate is 2λF (ρ∞). In other words, for any sufficient small > 0, there exists a time T > 0, such that when t > T, F(ρ(t)) − F(ρ∞) ≤ e−2(λF (ρ∞)− )t(F(ρ(T)) − F(ρ∞)). 27
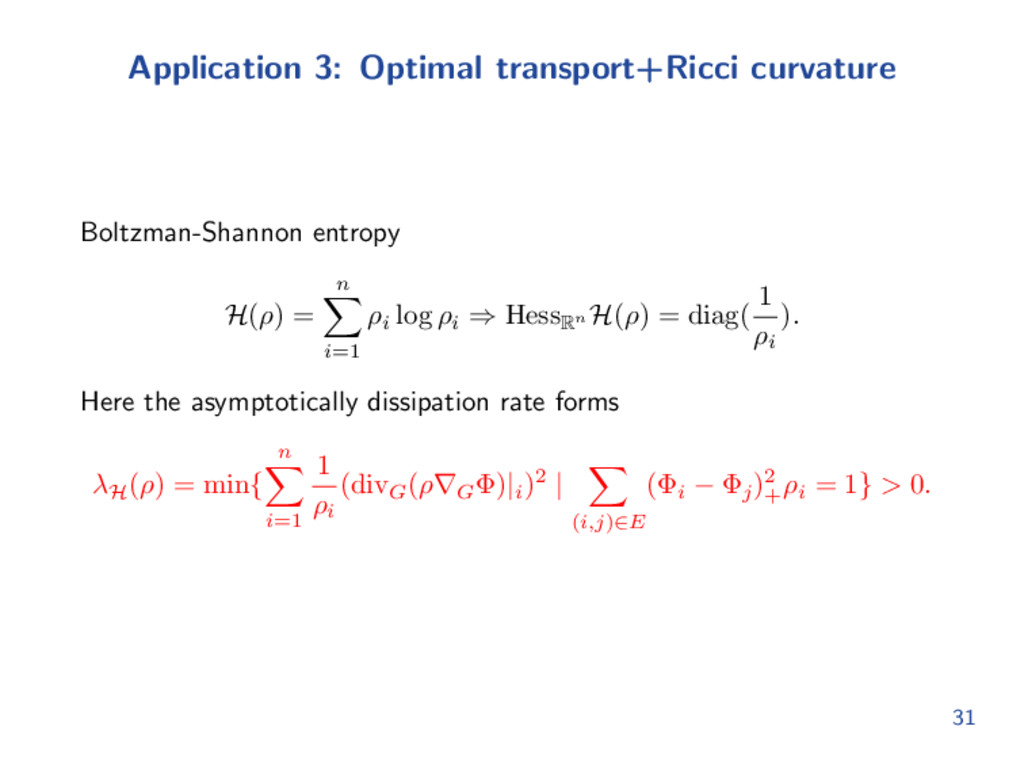
ρ(x)dx, whose Gibbs measure is a uniform measure. Then (HessP(M) H · ∇Φ, ∇Φ)ρ∗ = M [Ric(∇Φ, ∇Φ) + D2Φ 2 HS ]ρ∗(x)dx = M [∇ · (ρ∗∇Φ)]2 1 ρ∗(x) dx. The first equality is well known derived through Bochner’s formula, while the second equality is new. This special example just shows Yano’s formula9. 9Yano: “Some Remarks on Tensor Fields and Curvature”, Annals of Mathematics, 1952. 32
applications, such as image processing, segmentation and color transfer; Parallel algorithms on transport related optimizations (Movies); Modeling by Fokker-Planck equations on discrete states; Mean field games (differential games); “Geometry” of graphs. 33
and Fokker-Planck equations, Ph.d thesis, 2016. Wuchen Li, Stanley Osher and Wilfrid Gangbo Fast algorithm for Earth Mover’s distance, 2016. Shui-Nee Chow, Wuchen Li and Haomin Zhou Nonlinear Fokker-Planck equations on finite graphs with asymptotic properties, 2017. Shui-Nee Chow, Luca Dieci, Wuchen Li and Haomin Zhou Entropy dissipation semi-discretization schemes for Fokker-Planck equations, 2017. 34
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}