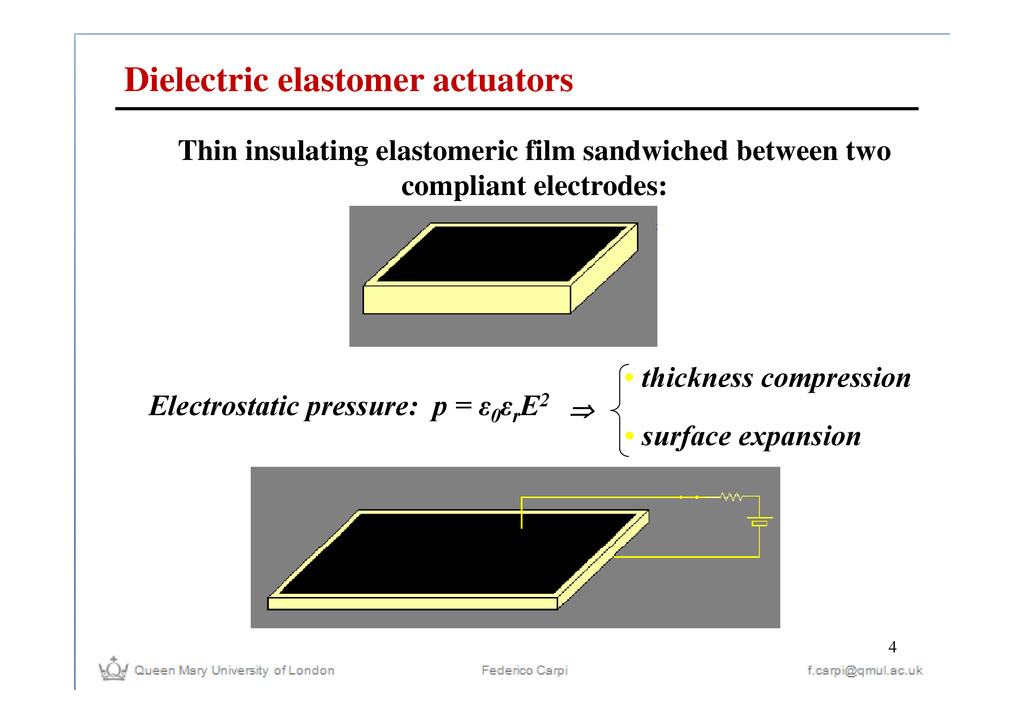
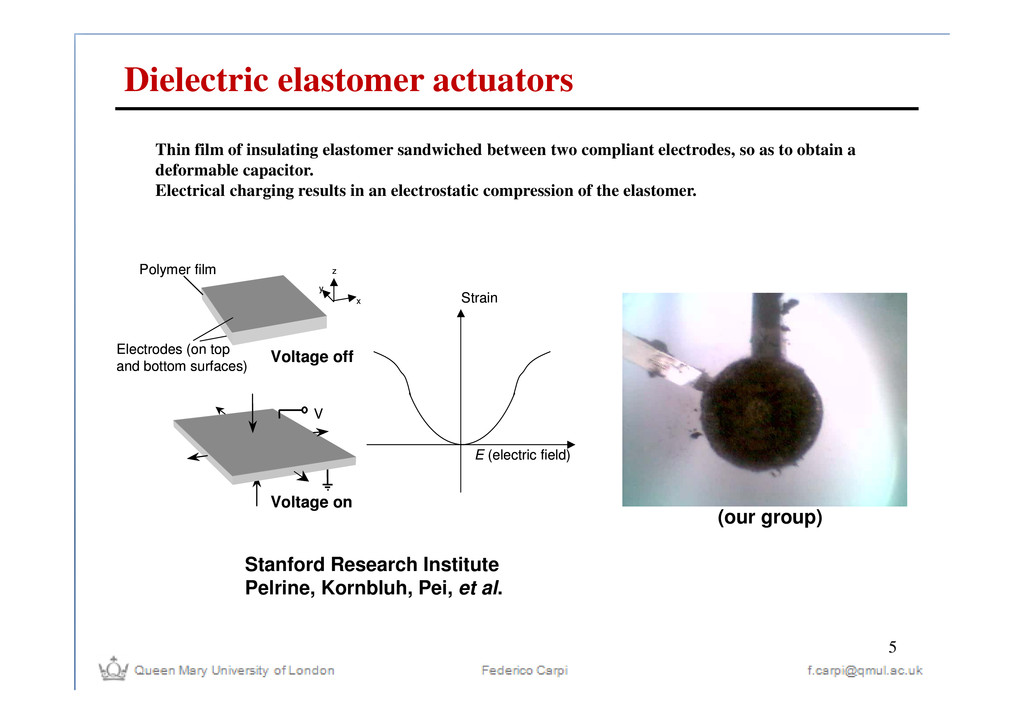
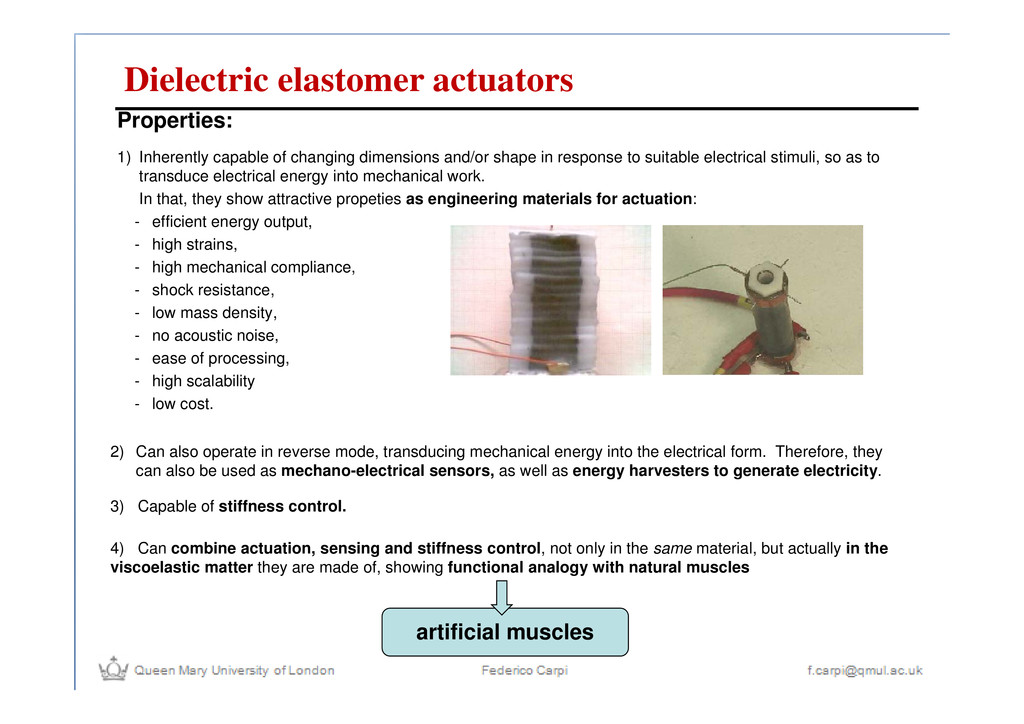
response to suitable electrical stimuli, so as to transduce electrical energy into mechanical work. In that, they show attractive propeties as engineering materials for actuation: - efficient energy output, - high strains, - high mechanical compliance, - shock resistance, - low mass density, - no acoustic noise, - ease of processing, - high scalability - low cost. 2) Can also operate in reverse mode, transducing mechanical energy into the electrical form. Therefore, they can also be used as mechano-electrical sensors, as well as energy harvesters to generate electricity. 3) Capable of stiffness control. 4) Can combine actuation, sensing and stiffness control, not only in the same material, but actually in the viscoelastic matter they are made of, showing functional analogy with natural muscles artificial muscles Dielectric elastomer actuators
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Federico CARPI [email protected] Full-page refreshable Braille display for the blind](https://files.speakerdeck.com/presentations/2738ef7099440130bbbf0e50c5ebd8a8/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}