Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Egle Systems
Search
oshlumh
July 13, 2014
Programming
120
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Egle Systems
Desarrollo de Hardware y Software para ARM, Sistemas embebidos y Smart Devices
oshlumh
July 13, 2014
Other Decks in Programming
See All in Programming
Welcome to the "Parametricity" 🏙️ − Generic だけど Specific な世界 −
guvalif
PRO
1
140
コンテキストの使い捨てをやめる — ビジネスルール駆動開発と miko —
ioki
0
270
過去最大のMCPアップデート! 2026-07-28 RC版の謎に迫る
licux
6
460
OS アップデート対応の取り組み方がもっと共有されてほしい
andpad
0
110
関数型プログラミングのメリットって何だろう?
wanko_it
0
150
LaravelLive Japan の裏方のすべて — 第188回 PHP勉強会@東京 (2026-06-24)
suguruooki
2
150
なぜ関数型プログラミングで「型」と「証明」が語られるのか #fp_matsuri
kajitack
3
720
スマートグラスで並列バイブコーディング
hyshu
0
280
技術記事、 専門家としてのプログラマ、 言語化
mizchi
14
7.3k
「正の参照」と 「負の導出」で組む ハーネスエンジニアリング
cottpan
1
130
これからAgentCoreを触る方へ トレンドはGatewayです
har1101
6
480
Performance Engineering for Everyone
elenatanasoiu
0
260
Featured
See All Featured
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
10k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Large-scale JavaScript Application Architecture
addyosmani
515
110k
The innovator’s Mindset - Leading Through an Era of Exponential Change - McGill University 2025
jdejongh
PRO
1
220
How GitHub (no longer) Works
holman
316
150k
JavaScript: Past, Present, and Future - NDC Porto 2020
reverentgeek
52
6k
The Anti-SEO Checklist Checklist. Pubcon Cyber Week
ryanjones
0
180
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
28
3.5k
Balancing Empowerment & Direction
lara
6
1.2k
I Don’t Have Time: Getting Over the Fear to Launch Your Podcast
jcasabona
34
2.8k
Exploring anti-patterns in Rails
aemeredith
3
440
Measuring Dark Social's Impact On Conversion and Attribution
stephenakadiri
2
230
Transcript
http://www.eglesys.com
Desarrollo de hardware/software para ARM Sistemas embebidos Smart devices
Es28-SOM ARM926EJ-S™ 454MHz 256MB RAM NAND + MMC 2xCAN-Bus, 2xEthernet,
5xUART, USB Host + OTG
Es335-SOM Cortex-A8™ 1000MHz 1024MB RAM GPU NAND + MMC 2xCAN-Bus,
Ethernet, EtherCAT, PROFINET, PROFIBUS, 6xUART, USB 2xOTG
Es6-SOM 4xCortex-A9™ 1200MHz 4096MB RAM GPU + VPU (4 pantallas)
NAND + MMC + SATA + PCIe 2xCAN-Bus, Ethernet GBit, 5xUART, USB Host + OTG
Sistemas operativos para Es6-SOM Linux embebido Ubuntu 12.04 LTS Android
4.2 Todos usan bootloaders y kernels adaptados al hardware
Linux embebido Sistema base con todo el soporte hardware y
lo mínimo para arrancar. Sin sistema de gestión de software. Las bibliotecas adicionales se instalan en /opt/<nombre> SDK de desarrollo.
None
SDK cross-toolchain + sysroot
Toolchain: Utilidades para crear un programa: gcc, ld, gdb, etc...
Host: Máquina donde trabajamos. Target: Máquina que ejecutará el software. Compilador cruzado: Compilador que se ejecuta en el host y crea ejecutables para el target.
El prefijo indica el tipo de binario que crea. No
es standard. arm-fsl-linux-gnueabi-gcc
Utilizando un compilador nativo: /usr/include para cabeceras /usr/lib bibliotecas compartidas
(*.so) Compilación cruzada: <sysrootdir>/usr/include cabeceras <sysrootdir>/usr/lib bibliotecas compartidas (*.so)
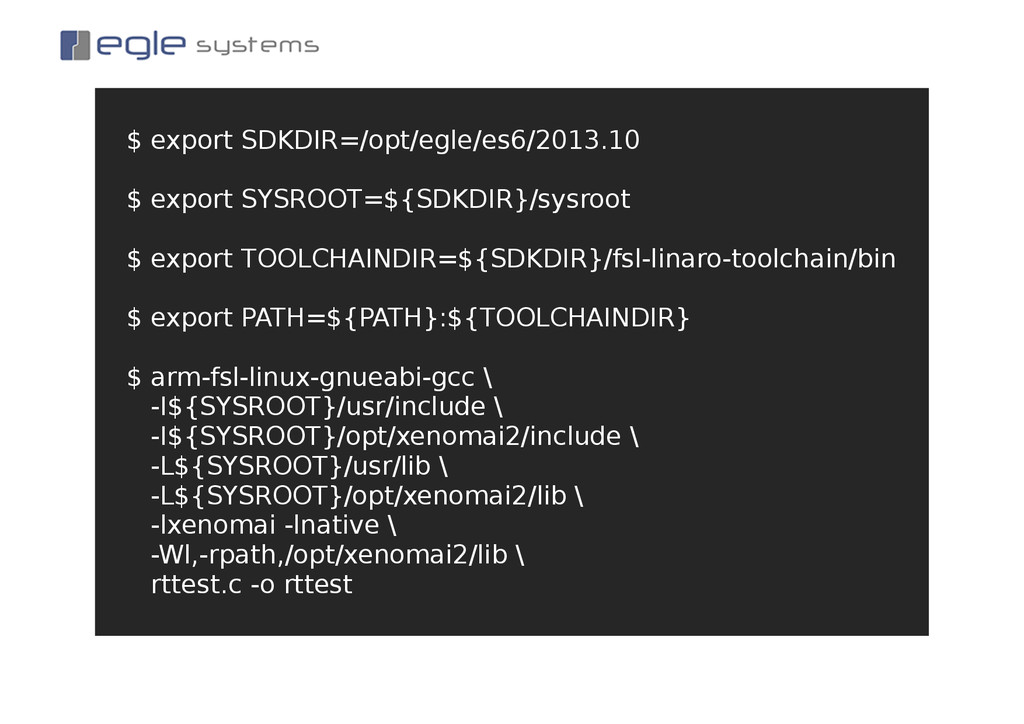
$ export SDKDIR=/opt/egle/es6/2013.10 $ export SYSROOT=${SDKDIR}/sysroot $ export TOOLCHAINDIR=${SDKDIR}/fsl-linaro-toolchain/bin $
export PATH=${PATH}:${TOOLCHAINDIR} $ arm-fsl-linux-gnueabi-gcc \ -I${SYSROOT}/usr/include \ -I${SYSROOT}/opt/xenomai2/include \ -L${SYSROOT}/usr/lib \ -L${SYSROOT}/opt/xenomai2/lib \ -lxenomai -lnative \ -Wl,-rpath,/opt/xenomai2/lib \ rttest.c -o rttest
El parámetro remote path para el linker: -Wl,-rpath,[libdir] permite incluir
en el binario rutas adicionales de búsqueda de bibliotecas en runtime.
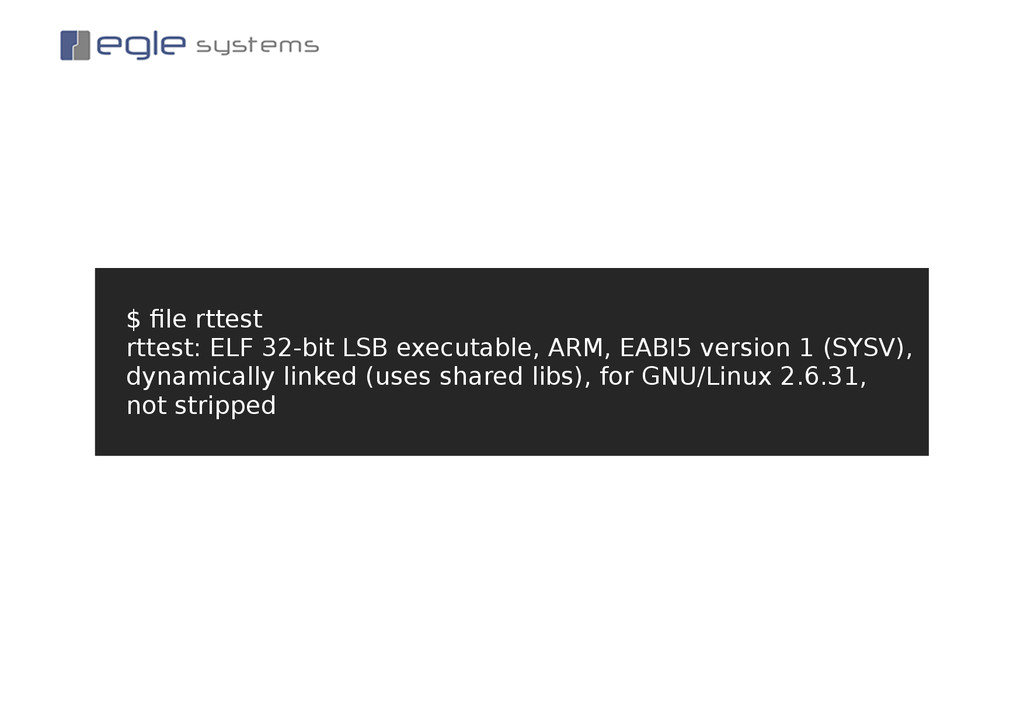
$ file rttest rttest: ELF 32-bit LSB executable, ARM, EABI5
version 1 (SYSV), dynamically linked (uses shared libs), for GNU/Linux 2.6.31, not stripped
Compilación de bibliotecas Autotools, Cmake, etc... Depende del proyecto.
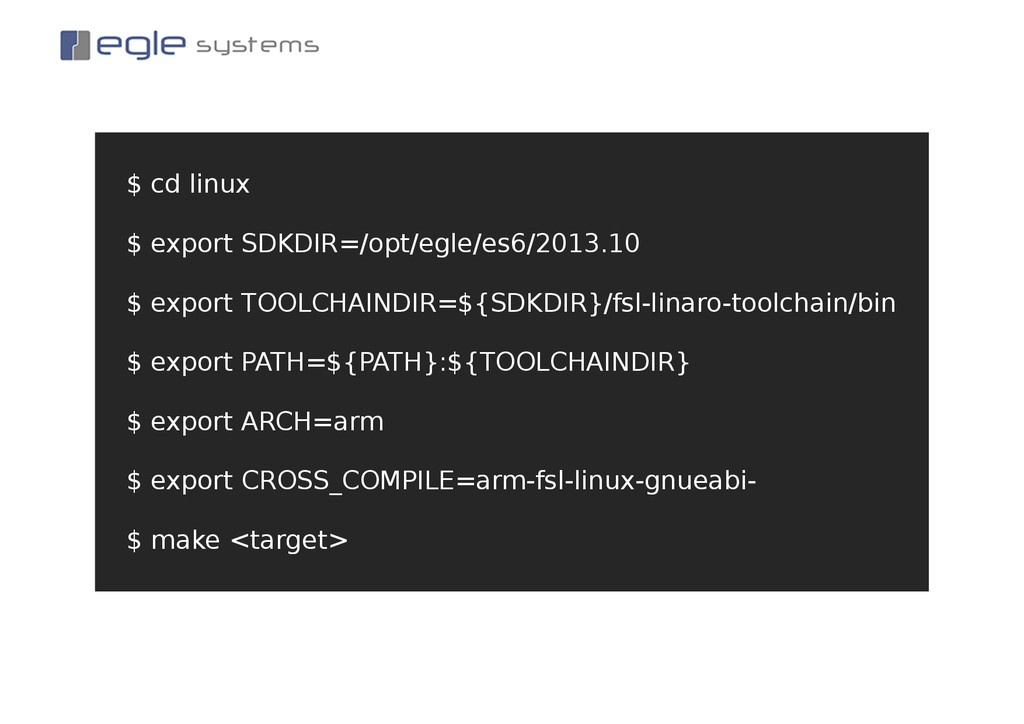
$ cd linux $ export SDKDIR=/opt/egle/es6/2013.10 $ export TOOLCHAINDIR=${SDKDIR}/fsl-linaro-toolchain/bin $
export PATH=${PATH}:${TOOLCHAINDIR} $ export ARCH=arm $ export CROSS_COMPILE=arm-fsl-linux-gnueabi- $ make <target>
Vale, ¿pero como depuro?: JTAG gdbserver
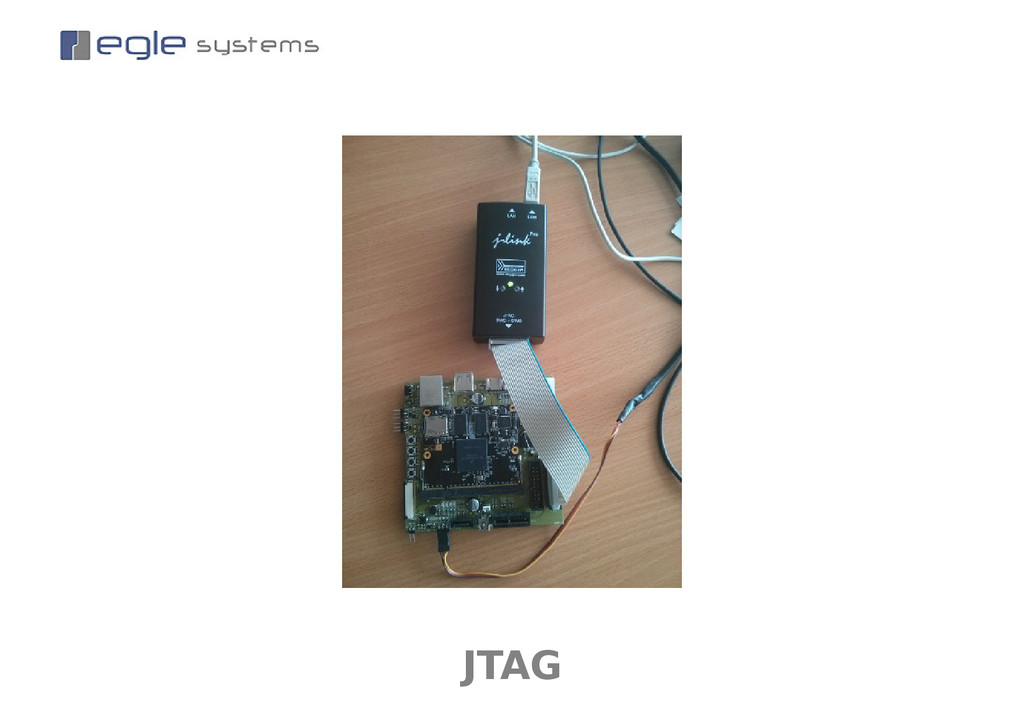
JTAG
$ scp rttest
[email protected]
:/root/rttest $ ssh
[email protected]
"gdbserver :5000 /root/rttest"
$ gdb (gdb) target remote 192.168.1.110:5000 (gdb) b main (gdb) continue
$ scp rttest
[email protected]
:/root/rttest $ gdb (gdb) target remote |
ssh -T 192.168.1.110 gdbserver - /root/rttest (gdb) b main (gdb) continue
IDEs: Eclipse CDT, qtcreator, Code::Blocks... La mayoria permite seleccionar el
compilador, sysroot, etc... También suelen permitir sesiones de depuración remotas.
FIN
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![El parámetro remote path para el linker: -Wl,-rpath,[libdir] permite incluir](https://files.speakerdeck.com/presentations/eba065a0ed0e01316f57121af30ec4cc/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![$ scp rttest [email protected]:/root/rttest $ ssh [email protected] "gdbserver :5000 /root/rttest"](https://files.speakerdeck.com/presentations/eba065a0ed0e01316f57121af30ec4cc/slide_19.jpg){kind=link}
![$ scp rttest [email protected]:/root/rttest $ gdb (gdb) target remote |](https://files.speakerdeck.com/presentations/eba065a0ed0e01316f57121af30ec4cc/slide_20.jpg){kind=link}
{kind=link}
{kind=link}