API -Communications between threads -Useful crates for multithreading & concurrency Asynchronous programming -A brief overlook of async/await syntax -Approaches for writing async applications -Usage of blocking calls in asynchronous code -Good practices in async programming -Useful crates for async stuff
It gives an opportunity to run multiple tasks simultaneously - Using all possible resources when it’s done right - And therefore gives a better performance!* *but depends from the task: in some cases single-threaded processing can be faster
can lead to problems, such as: - Race conditions, where threads are accessing data or resources in an inconsistent order* - Deadlocks, where two threads are waiting for each other to finish using a resource the other thread has, preventing both threads from continuing - Introducing new kind of bugs that happen only in certain conditions and are hard to reproduce and fix them properly *and therefore need to use synchronization primitives or lock-free structures
and local state - The thread name and the size can be configured - Communication can be done through channels, thread synchronisation primitives or shared-memory data structures In addition to it, the Rust compiler also helps with: - Ownership rules applied for multiple threads - Checks for having either only the one mutable reference OR many immutable references to any resource
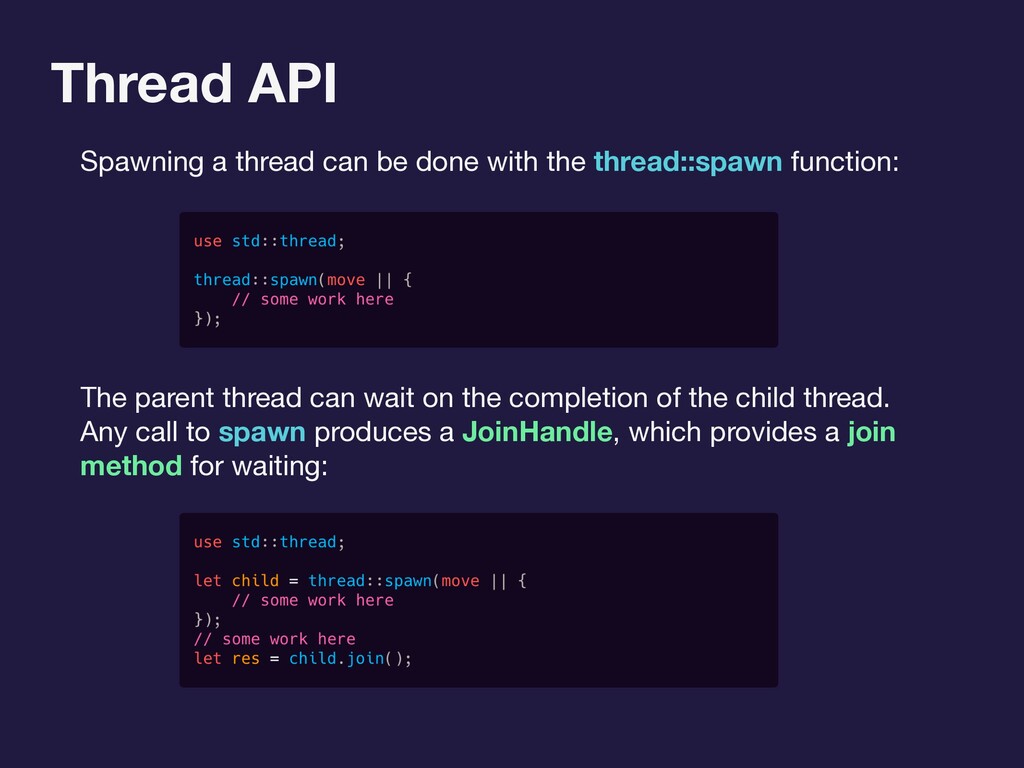
thread::spawn function: The parent thread can wait on the completion of the child thread. Any call to spawn produces a JoinHandle, which provides a join method for waiting:
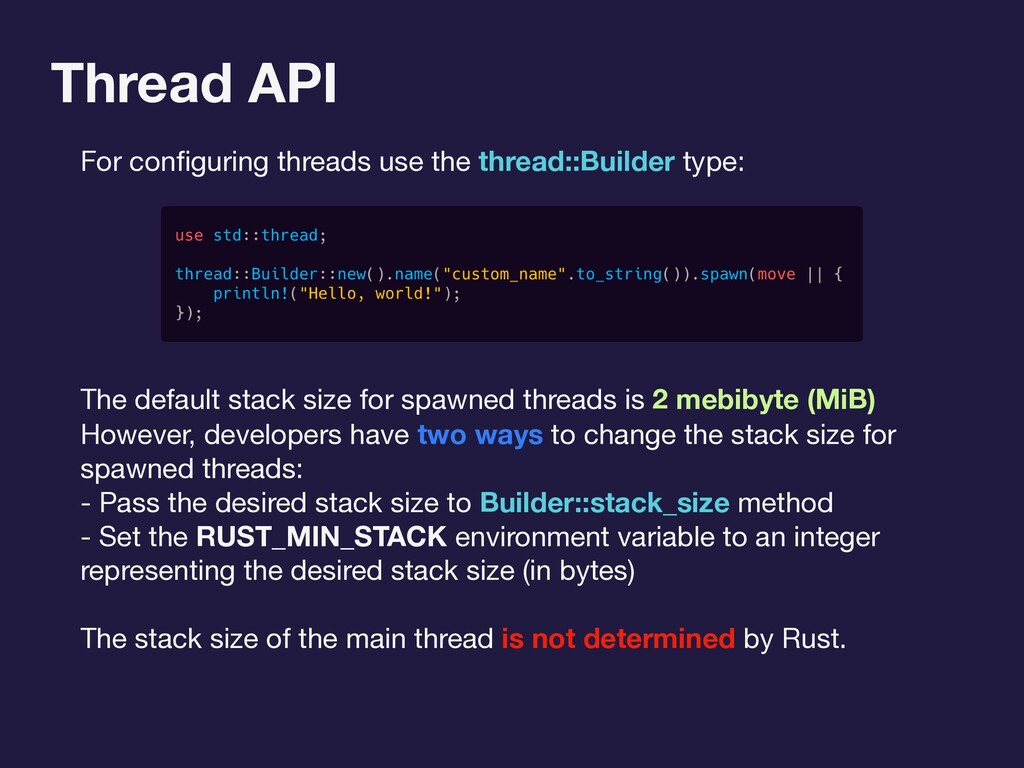
default stack size for spawned threads is 2 mebibyte (MiB) However, developers have two ways to change the stack size for spawned threads: - Pass the desired stack size to Builder::stack_size method - Set the RUST_MIN_STACK environment variable to an integer representing the desired stack size (in bytes) The stack size of the main thread is not determined by Rust.
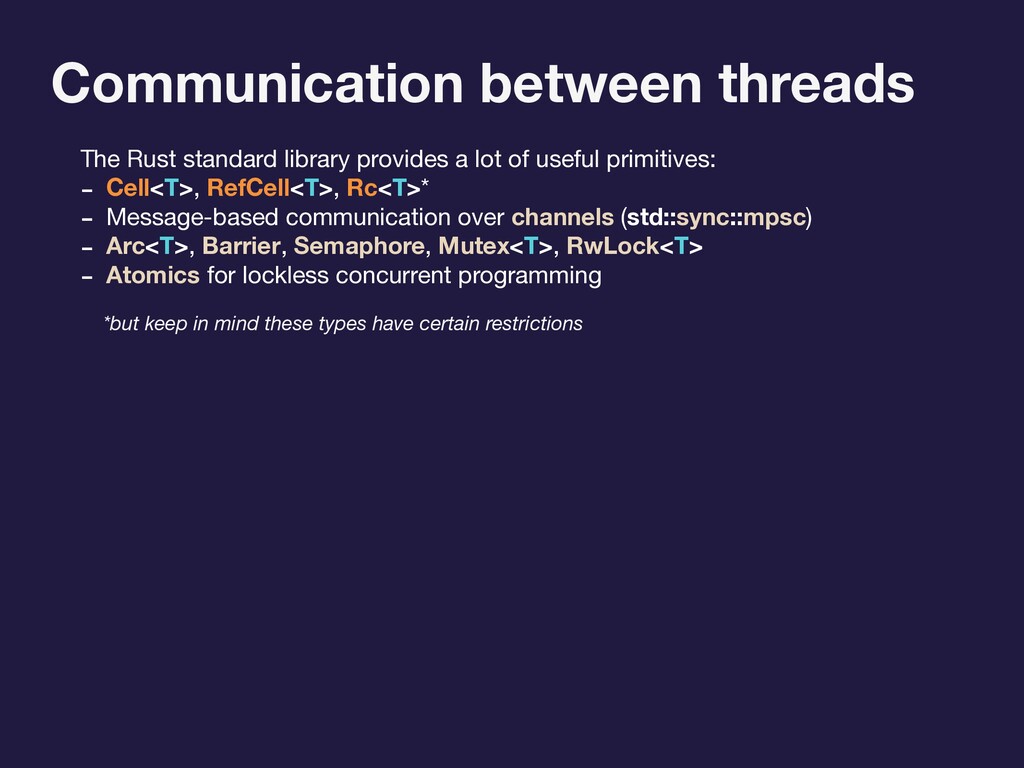
of useful primitives: - Cell<T>, RefCell<T>, Rc<T>* - Message-based communication over channels (std::sync::mpsc) - Arc<T>, Barrier, Semaphore, Mutex<T>, RwLock<T> - Atomics for lockless concurrent programming *but keep in mind these types have certain restrictions
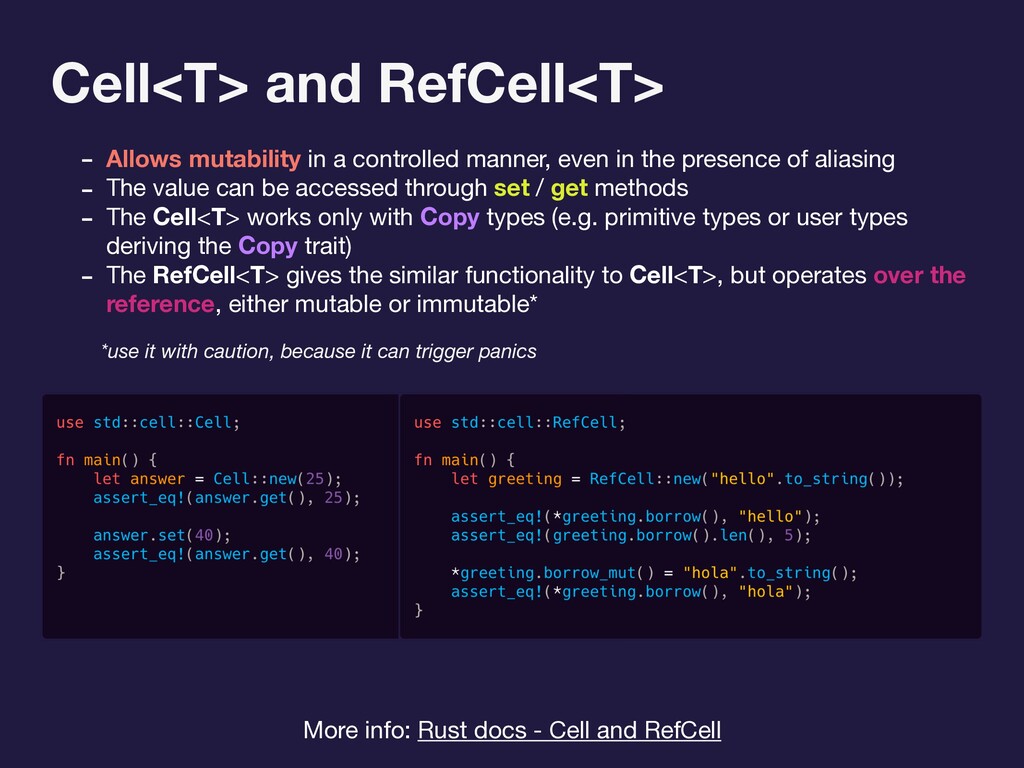
even in the presence of aliasing - The value can be accessed through set / get methods - The Cell<T> works only with Copy types (e.g. primitive types or user types deriving the Copy trait) - The RefCell<T> gives the similar functionality to Cell<T>, but operates over the reference, either mutable or immutable* *use it with caution, because it can trigger panics More info: Rust docs - Cell and RefCell
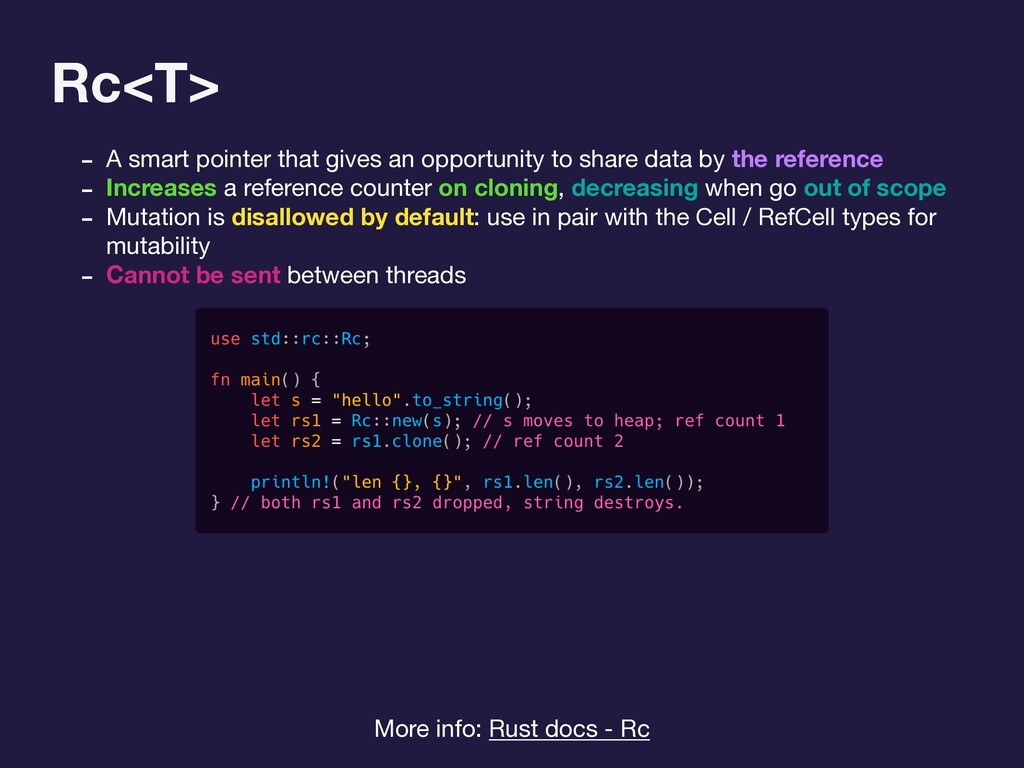
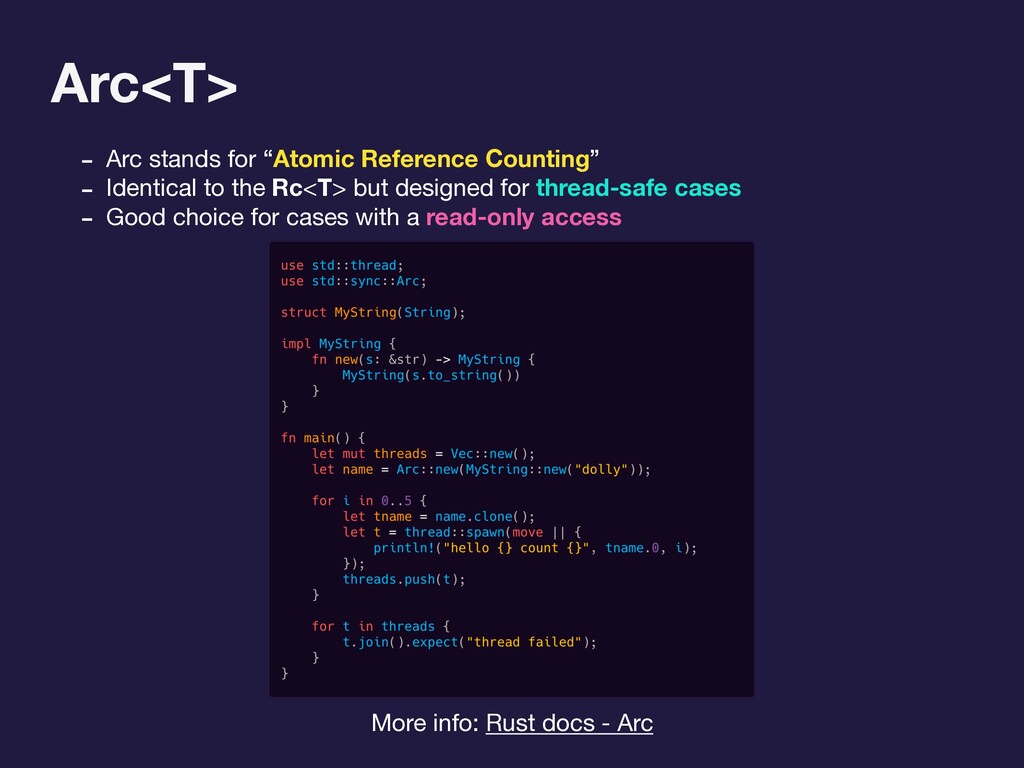
share data by the reference - Increases a reference counter on cloning, decreasing when go out of scope - Mutation is disallowed by default: use in pair with the Cell / RefCell types for mutability - Cannot be sent between threads More info: Rust docs - Rc
stands for “multiple producers” - “single consumer” - The channel() call returns two parts - transmitter and receiver - Each thread is passed a copy of the transmitter with clone, and calls send - The receiver uses recv for reading values More info: Rust docs - mpsc
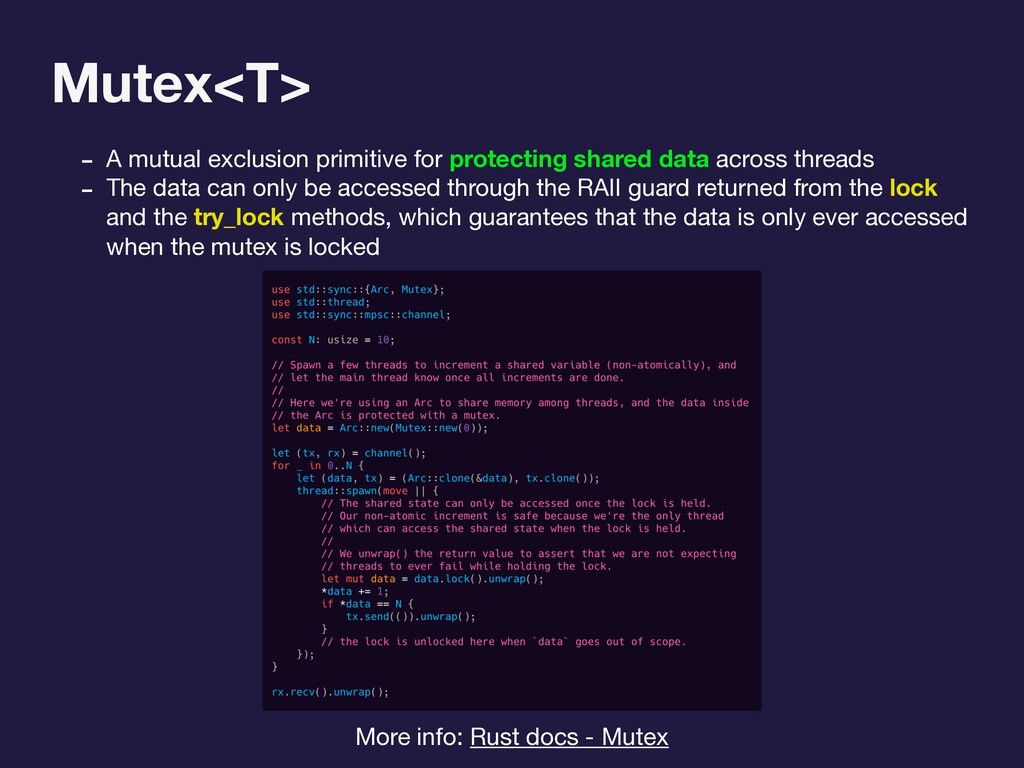
across threads - The data can only be accessed through the RAII guard returned from the lock and the try_lock methods, which guarantees that the data is only ever accessed when the mutex is locked More info: Rust docs - Mutex
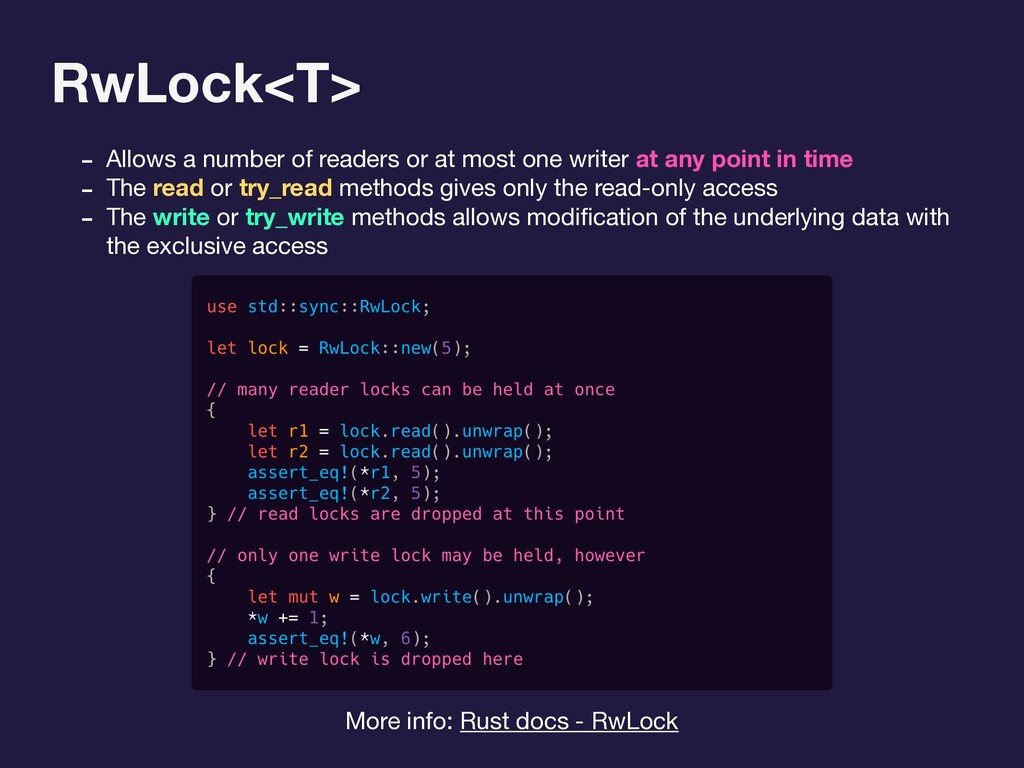
one writer at any point in time - The read or try_read methods gives only the read-only access - The write or try_write methods allows modification of the underlying data with the exclusive access More info: Rust docs - RwLock
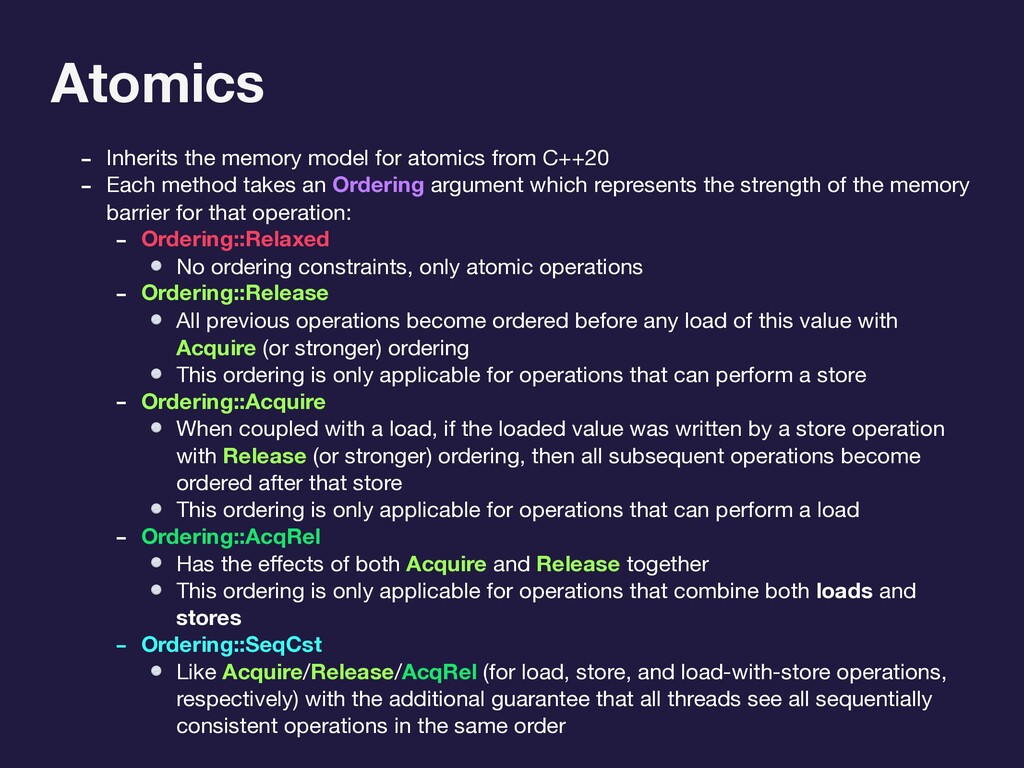
- Each method takes an Ordering argument which represents the strength of the memory barrier for that operation: - Ordering::Relaxed No ordering constraints, only atomic operations - Ordering::Release All previous operations become ordered before any load of this value with Acquire (or stronger) ordering This ordering is only applicable for operations that can perform a store - Ordering::Acquire When coupled with a load, if the loaded value was written by a store operation with Release (or stronger) ordering, then all subsequent operations become ordered after that store This ordering is only applicable for operations that can perform a load - Ordering::AcqRel Has the effects of both Acquire and Release together This ordering is only applicable for operations that combine both loads and stores - Ordering::SeqCst Like Acquire/Release/AcqRel (for load, store, and load-with-store operations, respectively) with the additional guarantee that all threads see all sequentially consistent operations in the same order
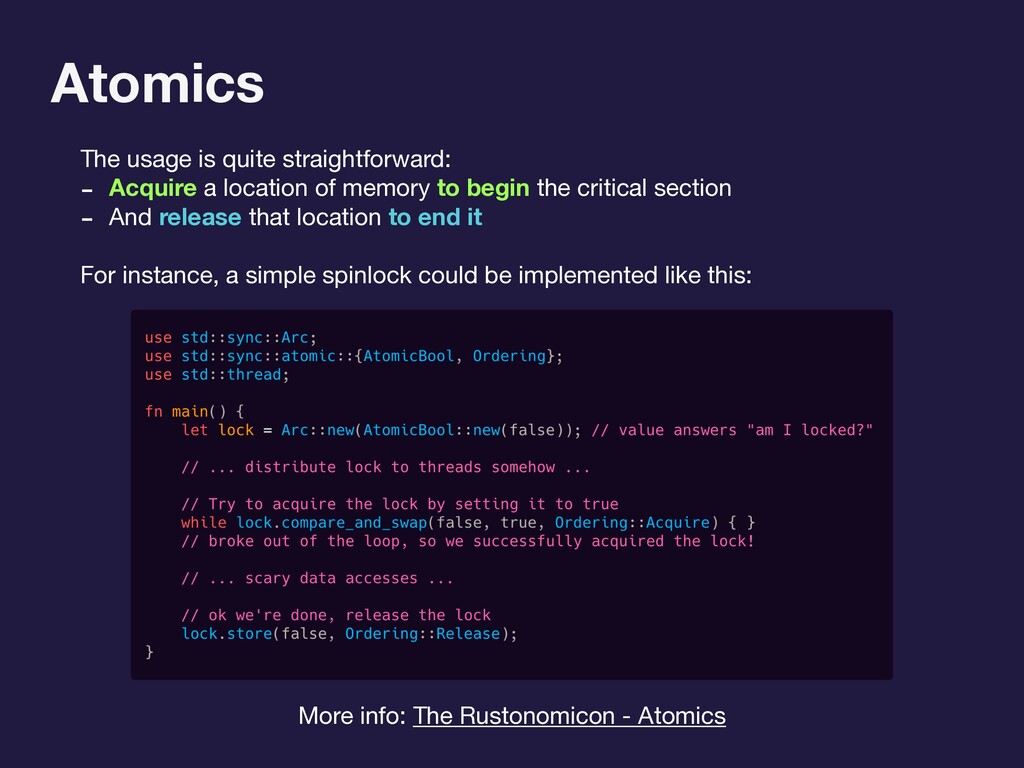
of memory to begin the critical section - And release that location to end it For instance, a simple spinlock could be implemented like this: More info: The Rustonomicon - Atomics
are dictating whether it is safe to transfer ownership or pass a reference into another thread - Automatically implemented for the most standard types in Rust - Designed as the “markers”, so therefore they have no methods and don’t provide any built-in functionality - Implementing those traits manually is unsafe, because a developer has to ensure the invariants are upheld* The definitions are quite simple: - A type is Send if it is safe to send it to another thread - A type is Sync if it is safe to share between threads (&T is Send) *instead of it wrap your own types into one of the primitives (or their combination) More info: Rust book
- A channel transfers ownership of the messages sent along it, so you can send a pointer from one thread to another without fear of the threads later racing for access through that pointer. Rust's channels enforce thread isolation - A lock knows what data it protects, and Rust guarantees that the data can only be accessed when the lock is held. State is never accidentally shared. "Lock data, not code" is enforced in Rust - Every data type knows whether it can safely be sent between or accessed by multiple threads, and Rust enforces this safe usage; there are no data races, even for lock-free data structures. Thread safety isn't just documentation; it's law - You can even share stack frames between threads, and Rust will statically ensure that the frames remain active while other threads are using them. Even the most daring forms of sharing are guaranteed safe in Rust Source: Fearless concurrency in Rust
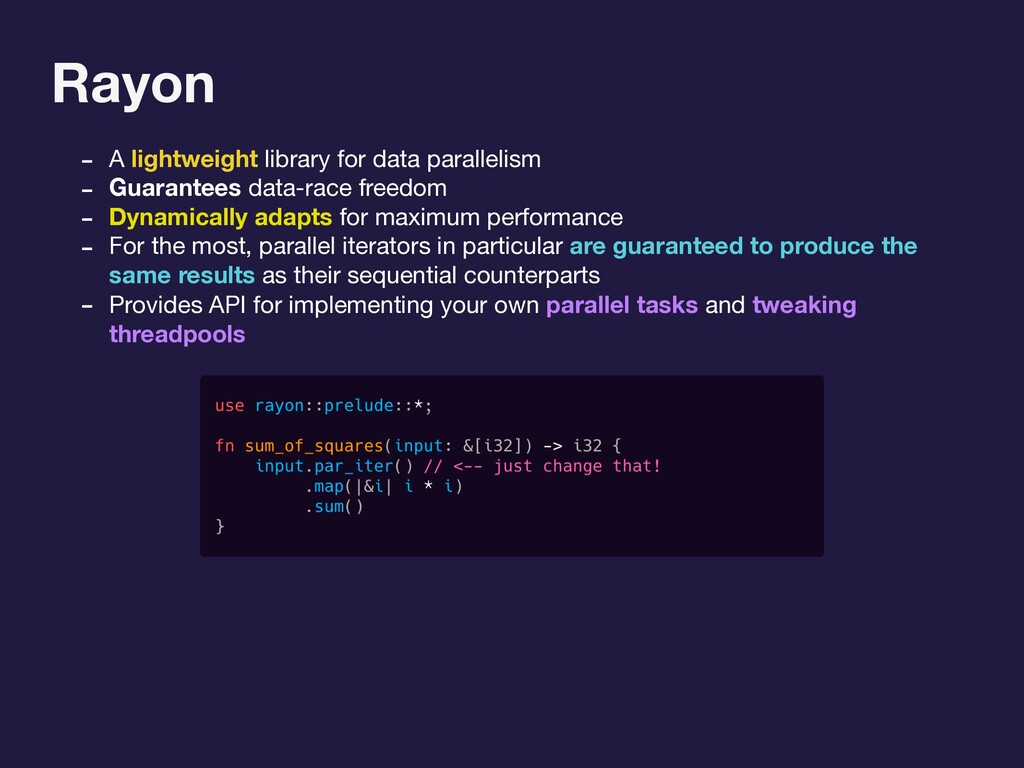
data-race freedom - Dynamically adapts for maximum performance - For the most, parallel iterators in particular are guaranteed to produce the same results as their sequential counterparts - Provides API for implementing your own parallel tasks and tweaking threadpools
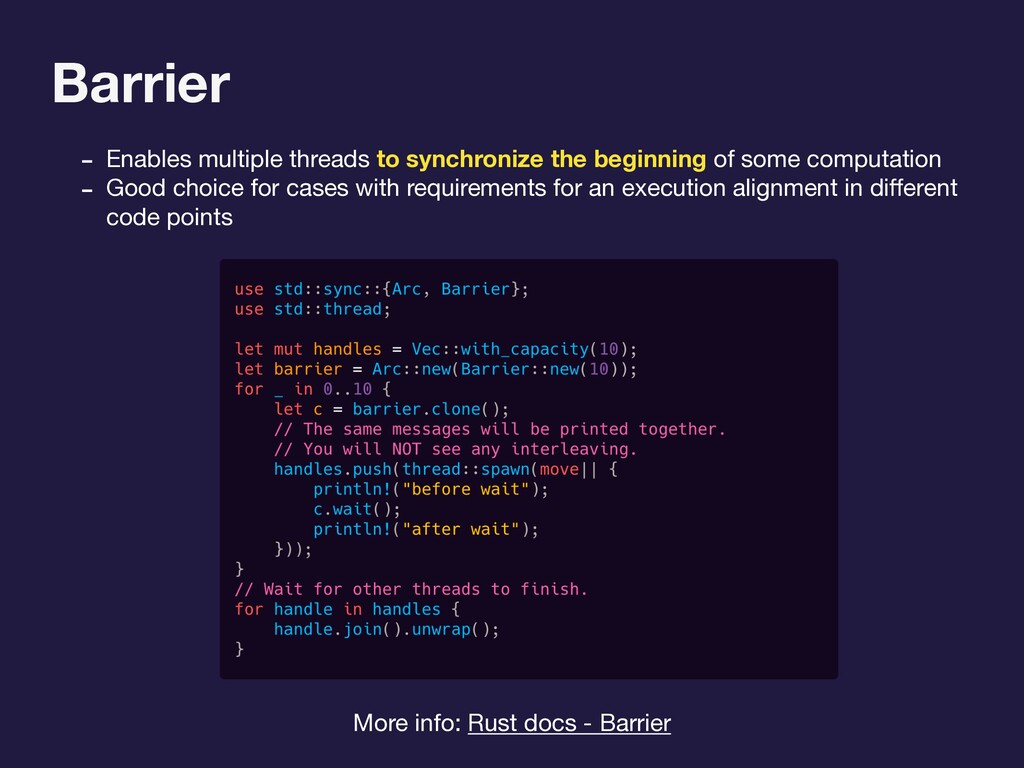
- Aiming to provide a rich set of tools for concurrency akin to java.util.concurrent and outdo Go channels in features and performance. - Provides a lot of additional primitives. For example: - AtomicCell<T>, which works just like Cell<T>, except it can also be shared among threads - CachePadded, for padding and aligning a value to the length of a cache line - WaitGroup, which allows threads to synchronize the beginning or the end of some computation. Inspired by Go’s WaitGroup from its standard library
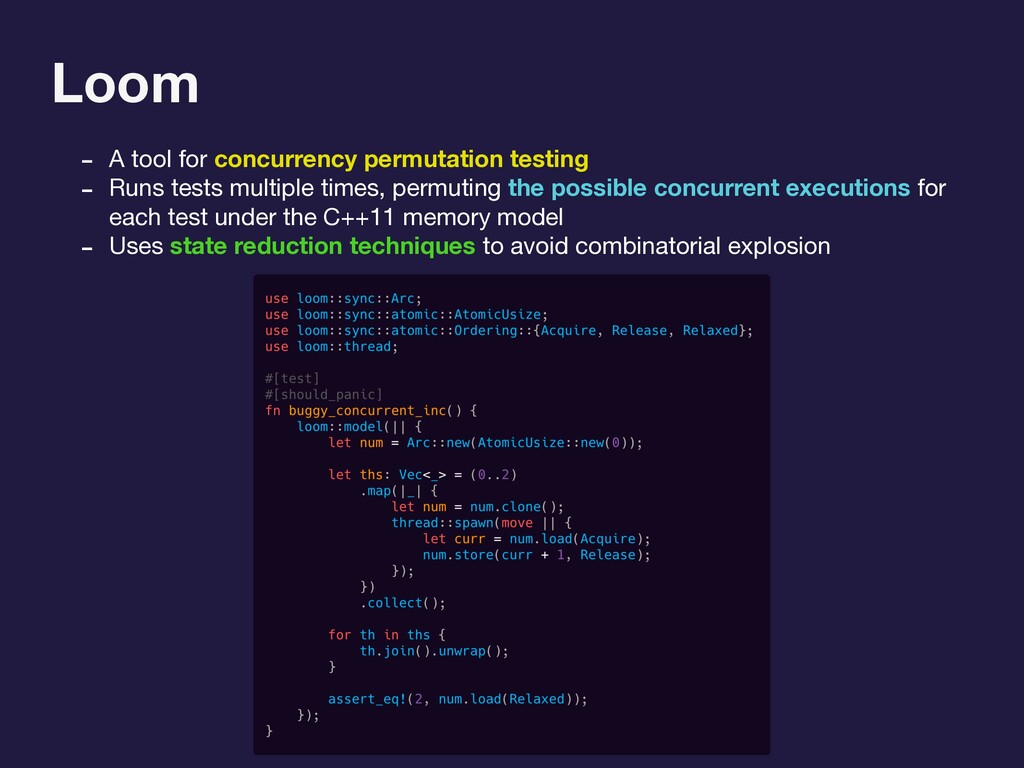
tests multiple times, permuting the possible concurrent executions for each test under the C++11 memory model - Uses state reduction techniques to avoid combinatorial explosion
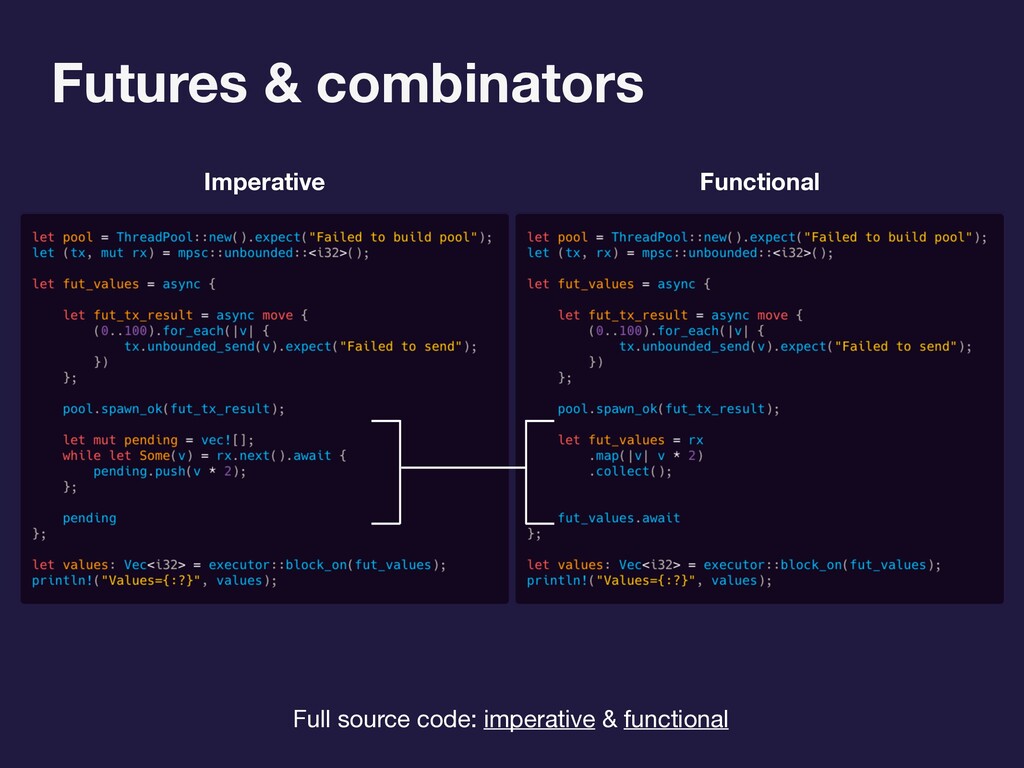
is to express a value that not ready yet - On a high level consider futures as a building block for doing a lot of concurrent operations in time - All futures in Rust are poll-based - All futures describe the steps to execution and will be polled only when they were spawned in the executor - And therefore compiler generates an inner state machine for the given future - The implementation of futures is independent from any of existing event loops - Futures can be declared in an imperative or in a functional way
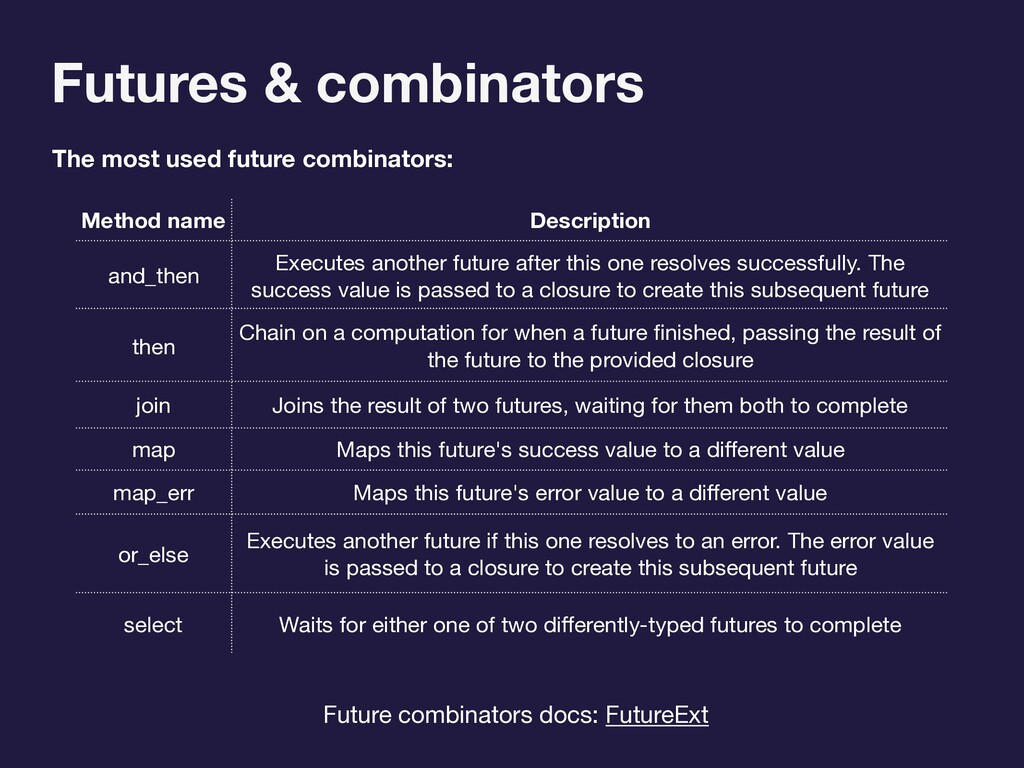
after this one resolves successfully. The success value is passed to a closure to create this subsequent future then Chain on a computation for when a future finished, passing the result of the future to the provided closure join Joins the result of two futures, waiting for them both to complete map Maps this future's success value to a different value map_err Maps this future's error value to a different value or_else Executes another future if this one resolves to an error. The error value is passed to a closure to create this subsequent future select Waits for either one of two differently-typed futures to complete Future combinators docs: FutureExt The most used future combinators:
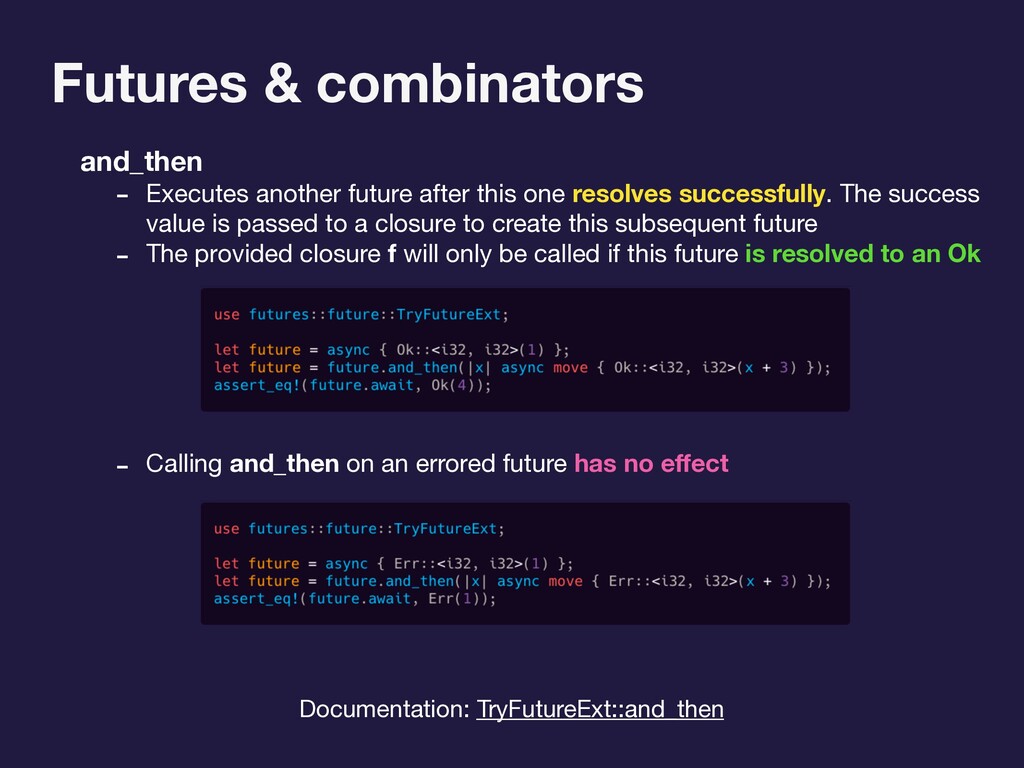
after this one resolves successfully. The success value is passed to a closure to create this subsequent future - The provided closure f will only be called if this future is resolved to an Ok - Calling and_then on an errored future has no effect
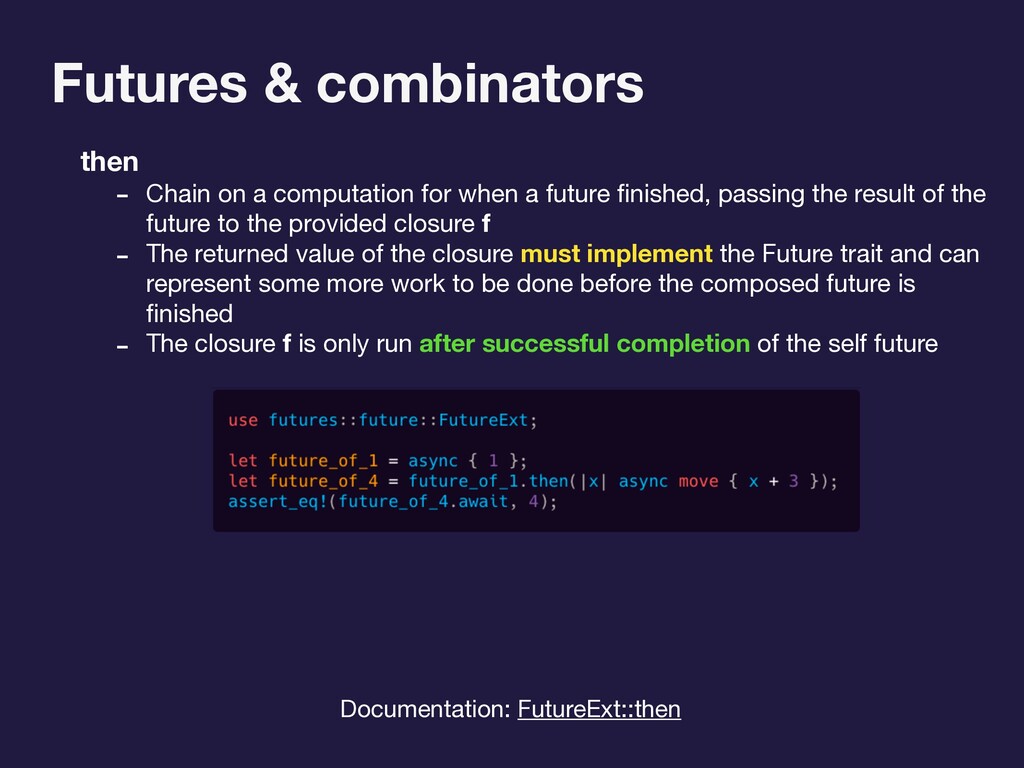
computation for when a future finished, passing the result of the future to the provided closure f - The returned value of the closure must implement the Future trait and can represent some more work to be done before the composed future is finished - The closure f is only run after successful completion of the self future
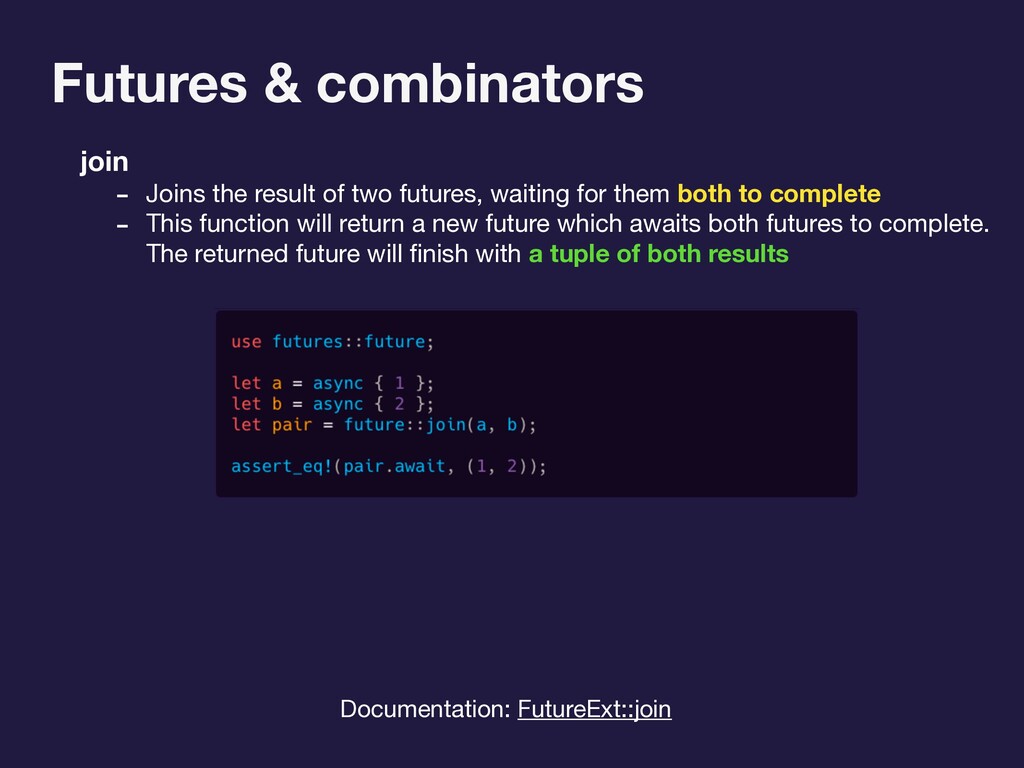
of two futures, waiting for them both to complete - This function will return a new future which awaits both futures to complete. The returned future will finish with a tuple of both results
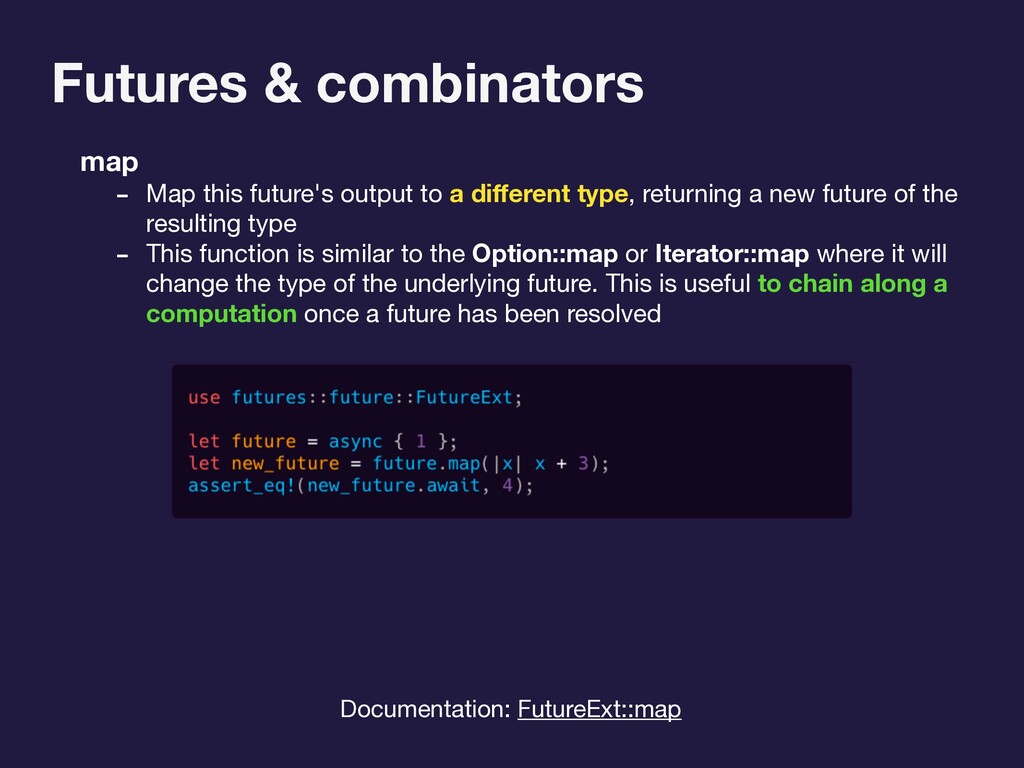
output to a different type, returning a new future of the resulting type - This function is similar to the Option::map or Iterator::map where it will change the type of the underlying future. This is useful to chain along a computation once a future has been resolved
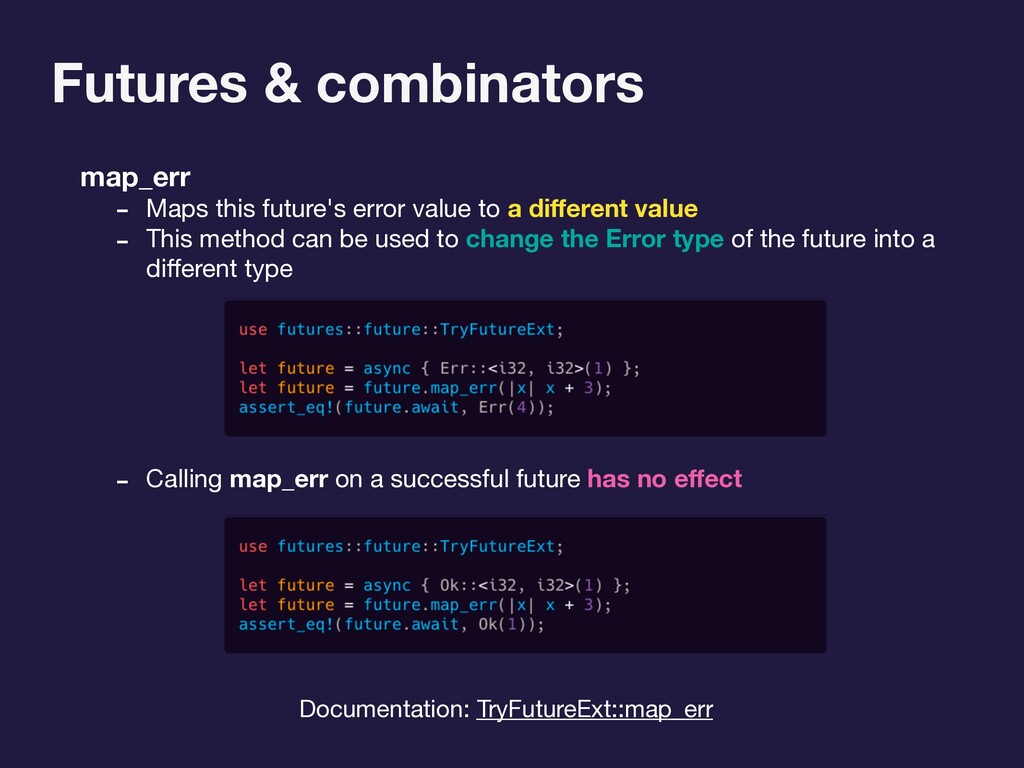
error value to a different value - This method can be used to change the Error type of the future into a different type - Calling map_err on a successful future has no effect
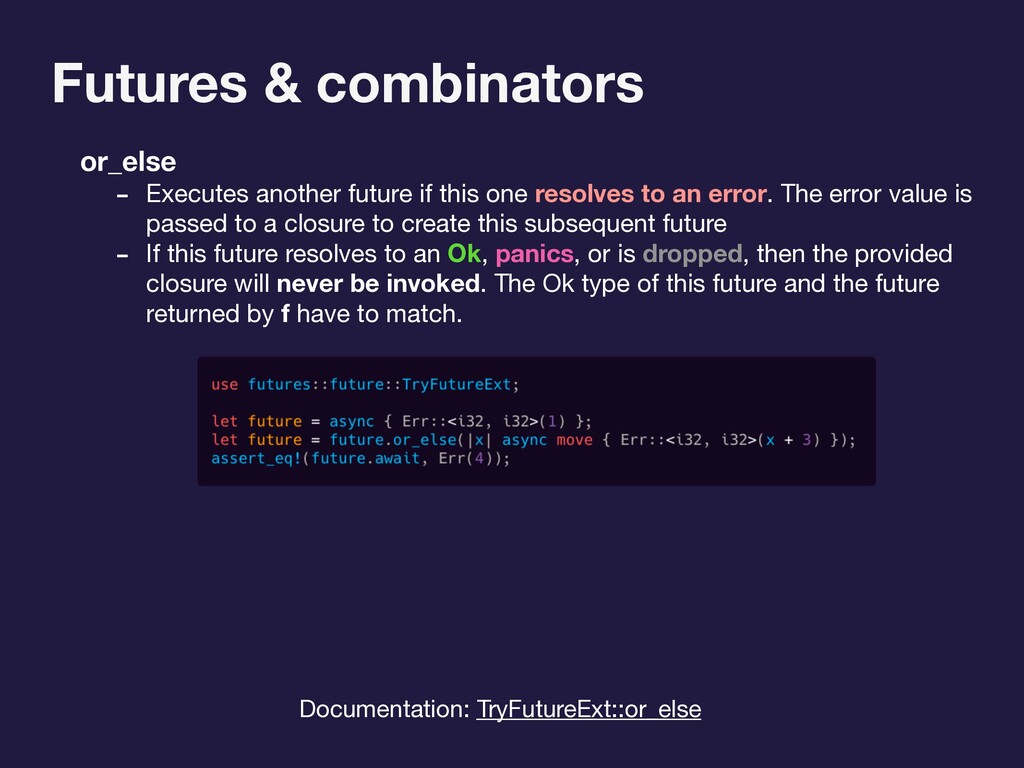
if this one resolves to an error. The error value is passed to a closure to create this subsequent future - If this future resolves to an Ok, panics, or is dropped, then the provided closure will never be invoked. The Ok type of this future and the future returned by f have to match.
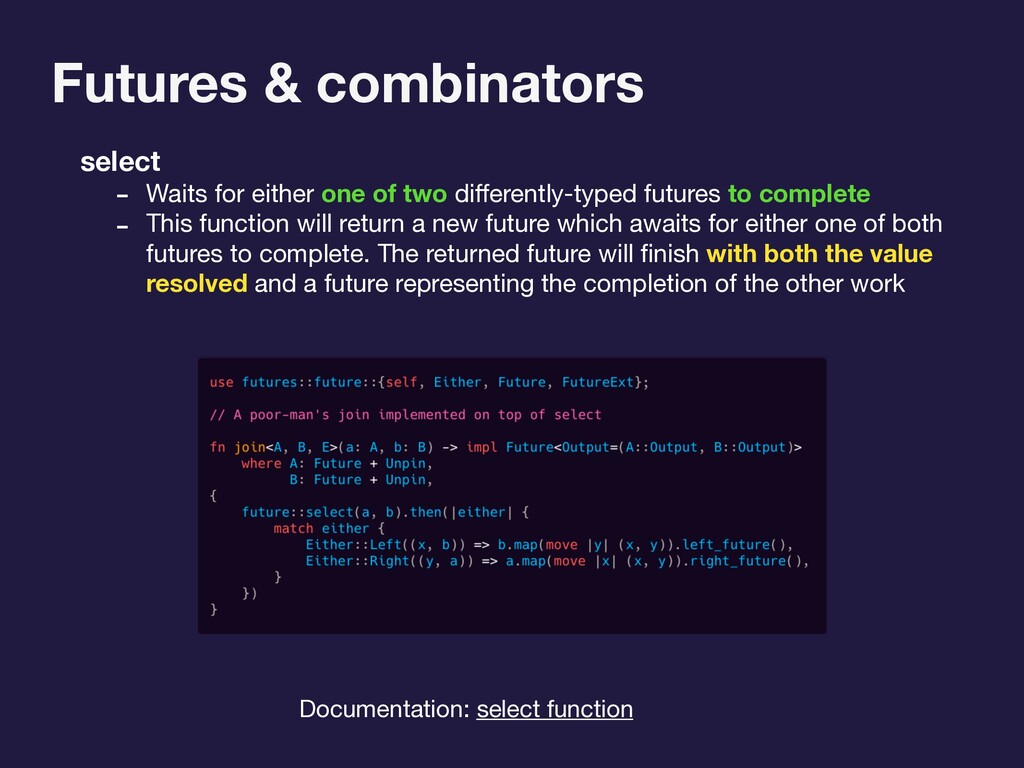
either one of two differently-typed futures to complete - This function will return a new future which awaits for either one of both futures to complete. The returned future will finish with both the value resolved and a future representing the completion of the other work
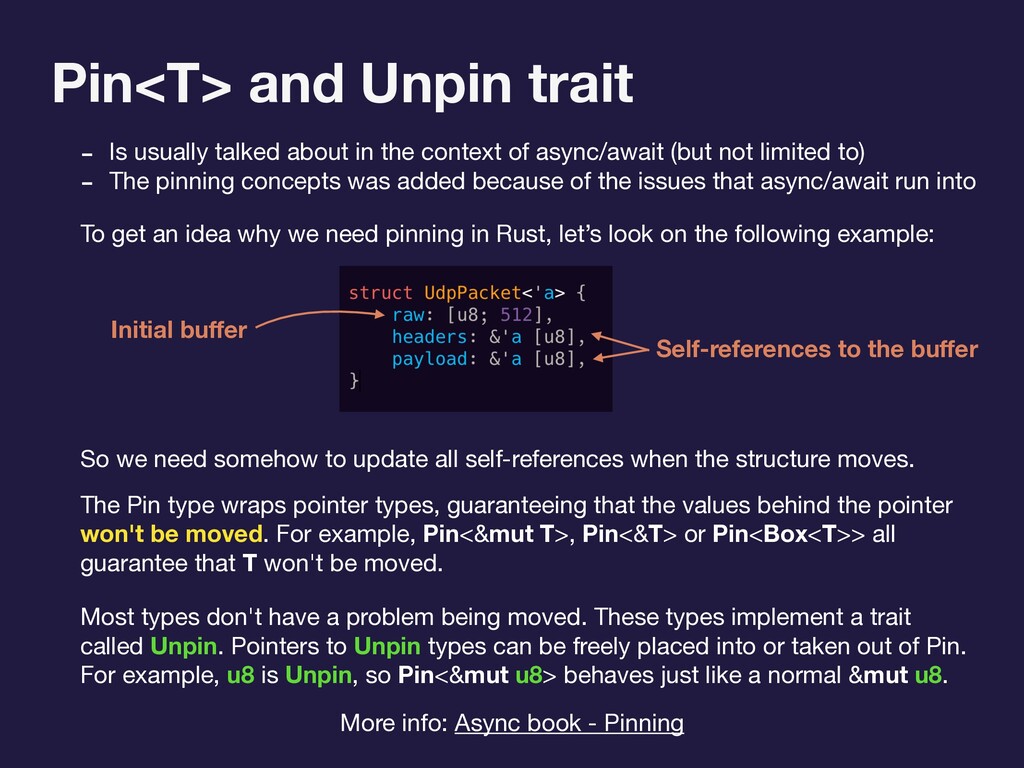
the context of async/await (but not limited to) - The pinning concepts was added because of the issues that async/await run into To get an idea why we need pinning in Rust, let’s look on the following example: Initial buffer Self-references to the buffer Most types don't have a problem being moved. These types implement a trait called Unpin. Pointers to Unpin types can be freely placed into or taken out of Pin. For example, u8 is Unpin, so Pin<&mut u8> behaves just like a normal &mut u8. The Pin type wraps pointer types, guaranteeing that the values behind the pointer won't be moved. For example, Pin<&mut T>, Pin<&T> or Pin<Box<T>> all guarantee that T won't be moved. So we need somehow to update all self-references when the structure moves. More info: Async book - Pinning
of the Tokio crate had breaking changes - Had a lack of crates for covering common use cases with async - Explicit calls to executor for spawning futures and entry points - Hard to write and to maintain, especially for beginners But in the same time: - Quite efficient and fast - Had a stable and a predictable behaviour - Debugging process wasn’t hard - Were invented a lot of experimental crates to use
finally can: - Use async/await keywords in function signatures and calls - Much easier propagate errors with a help of the ? operator - Let compiler converts Result<T, E> instances into compatible impl Future<Item=T, Error=E> types However, keep in mind that: - In some cases developers still need to use the old approach - Futures still require to be Send + Sync + ‘static - Most of things that we did with the old approach now handles implicitly
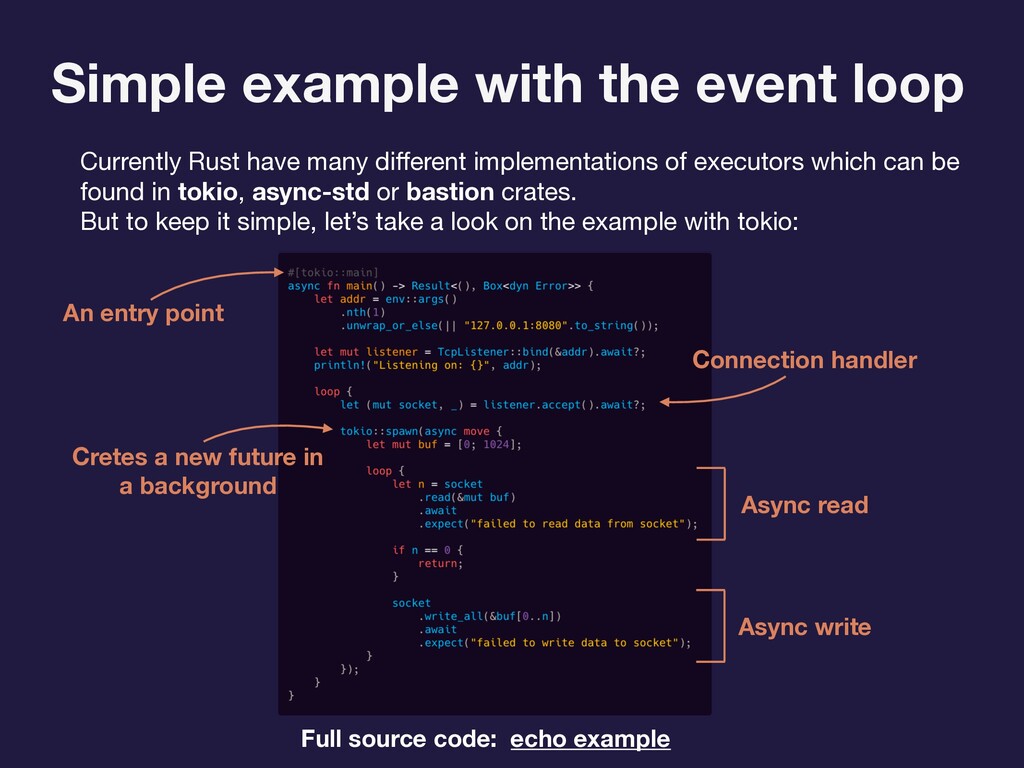
example Currently Rust have many different implementations of executors which can be found in tokio, async-std or bastion crates. But to keep it simple, let’s take a look on the example with tokio: An entry point Cretes a new future in a background Async read Async write Connection handler
tasks will only run for short periods at a time before yielding back to the thread pool. But sometimes developers need to do blocking calls, for example: - Perform synchronous operations - Don’t have async clients that cover our needs, but have blocking implementations For executing blocking calls developer can: - Use the appropriate method depends on the crate: - tokio_threadpool::blocking method in the tokio crate - bastion::blocking macro in the bastion crate - async_std::task::block_on function in the async-std crate - Do a regular async_std::spawn call, because it measures the time that requires to perform the operation and then spawn the task in background when it needed
recommend to: - Minimize the size of chained futures because we want to be productive and have small compilation time in summary - Enable logger (e.g. use the log crate) and add appropriate calls - When debugging: Use dbg! / println! macro when it’s necessary Set RUST_BACKTRACE=1 in env for getting stack traces - Do load testing for the result program, because it helps to find issues and bugs on earlier stages. For example you can try: Gatling (Scala) MZBench (Erlang) Locust (Python) Artillery (JavaScript)
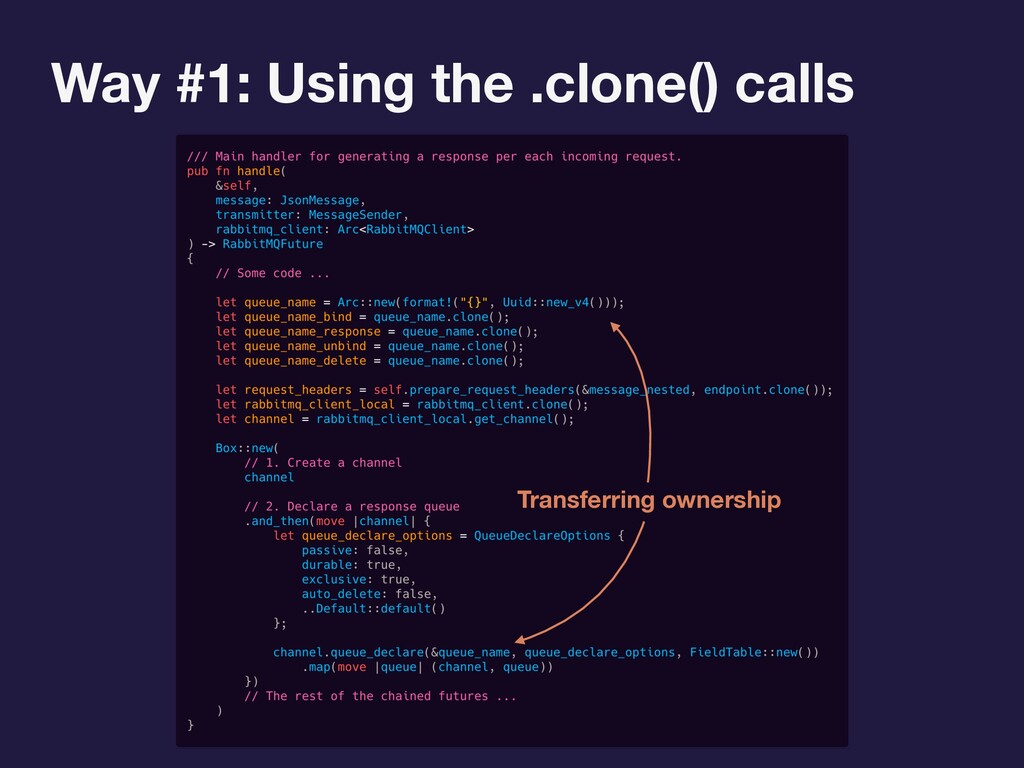
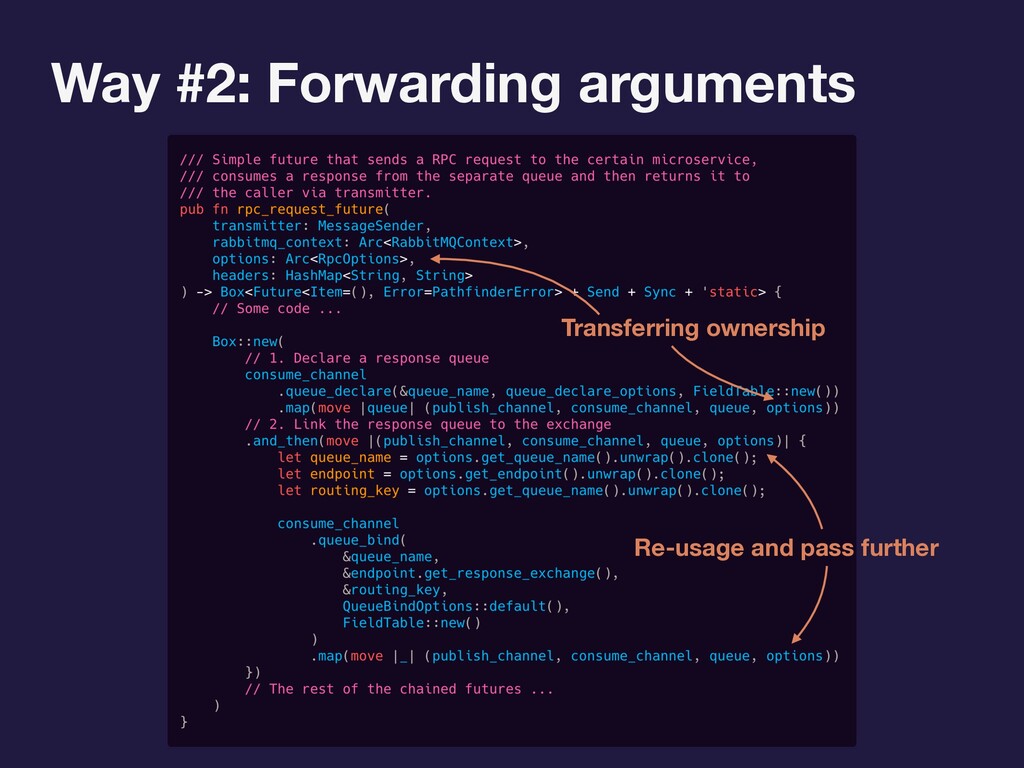
the easiest ways to fix ownership issues - Good fits for cases when necessary to use it once and don’t need to pass it through the all chain of futures Cons: - Can create an object copy if it isn't a reference type - The more clone calls you do, the harder code will be to maintain
potential issues with ownership model - An ideal solution when needs to use data everywhere - Easier to maintain codebase Cons: - Requires refactoring code (sometimes significantly) - The used wrappers / structures must be thread-safe
applications with the Rust programming language. Features: - A multithreaded, work-stealing based task scheduler - A reactor backed by the operating system's event queue (epoll, kqueue, IOCP, etc.) - Asynchronous TCP and UDP sockets - Cancellation and backpressure features out-of-the-box - Scales well without adding overhead to the application, allowing it to thrive in resource constrained environments
library, designed to make async programming easy, efficient, worry- and error-free. Features: - Asynchronous primitives for filesystem and network I/O - Exposes a task in a model similar to the thread module in std - async/await compatible versions of primitives (e.g. Arc, Mutex) - Provides the similar API that the Rust standard library has but for async purposes - Has the built-in blocking calls detection mechanism - Compatible with other popular crates (e.g. Tokio, Bastion)
Built on the top of Tokio - Based on futures for asynchronous message handling - Actor communication in a local / thread context - Lightweight supervision support out-of-the-box - Typed messages (no Any type). Generic message are allowed. - Built for extensible and fast applications Written in Microsoft by Nikolai Kim during his work on Azure IoT services. Open sourced in 2017. Battle-tested in production.
dynamic, dispatch-oriented, lightweight process model Features: - Actors model out-of-the-box - Built for utilizing all system resources efficiently - Heavily inspired by Erlang OTP / Akka framework - Message-based communication between actors - Completely asynchronous runtime with NUMA-aware and cache- affine SMP executor* - Supervisors support for managing actor’s lifecycle and more…** *currently available with the “unstable” feature flag **ping me for more info, I am the one of the core developers in the project ;) Bastion
concurrency - [Chapter] A Gentle Introduction To Rust: Threads, Networking and Sharing - Tokio.rs documentation: Getting started - Async programming in Rust
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Books & links - [Chapter] The Rust Programming Language: Fearless](https://files.speakerdeck.com/presentations/17f1dfd4a180487280064b895d3f9801/slide_61.jpg){kind=link}
{kind=link}