– Mixed approach by Ott et al. – Island-hopping in VANET by Sarafijanovic-Djukic et al. Similar vision in satellite networks – « A DTN routing scheme for LEO satellites topology » by Diana et al. 7
Phe-Neau, Marcelo Dias de Amorim, and Vania Conan, “Fine-Grained Intercontact Characterization in Disruption-Tolerant Networks,” IEEE ISCC, Kerkyra, Greece, June 2011. Tiphaine Phe-Neau, Marcelo Dias de Amorim, and Vania Conan, “Vicinity-based DTN Characterization,” ACM MobiOpp, Zurich, Switzerland, March 2012. Tiphaine Phe-Neau, Marcelo Dias de Amorim, and Vania Conan, “The Strength of Vicinity Annexation in Opportunistic Networking,” IEEE NetSciCom, Torino, Italy, April 2013.
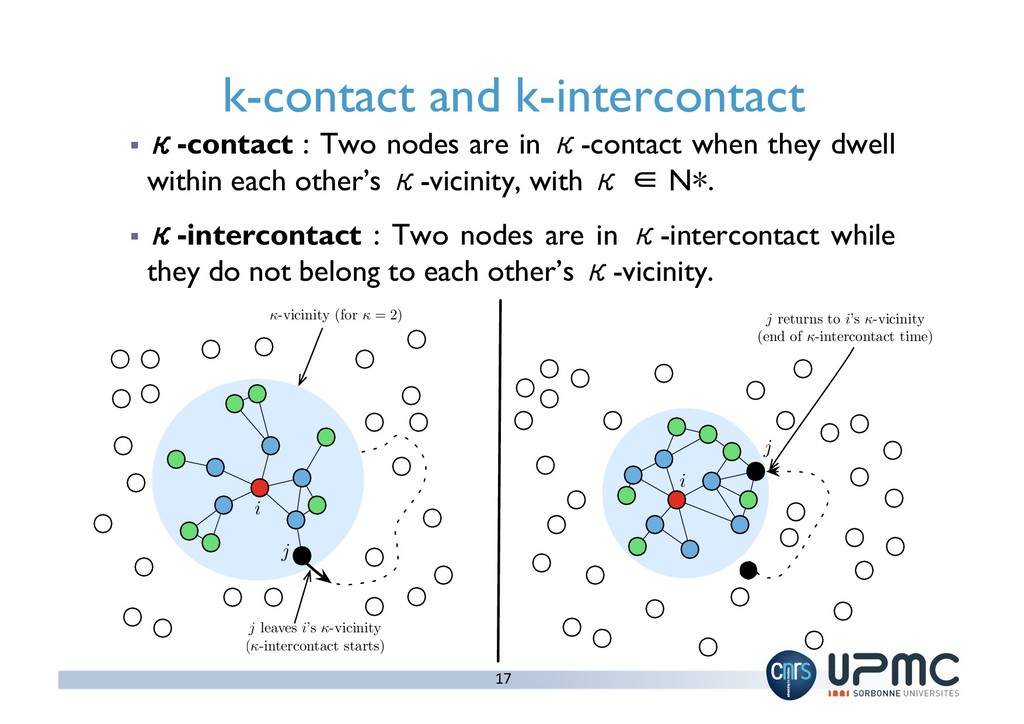
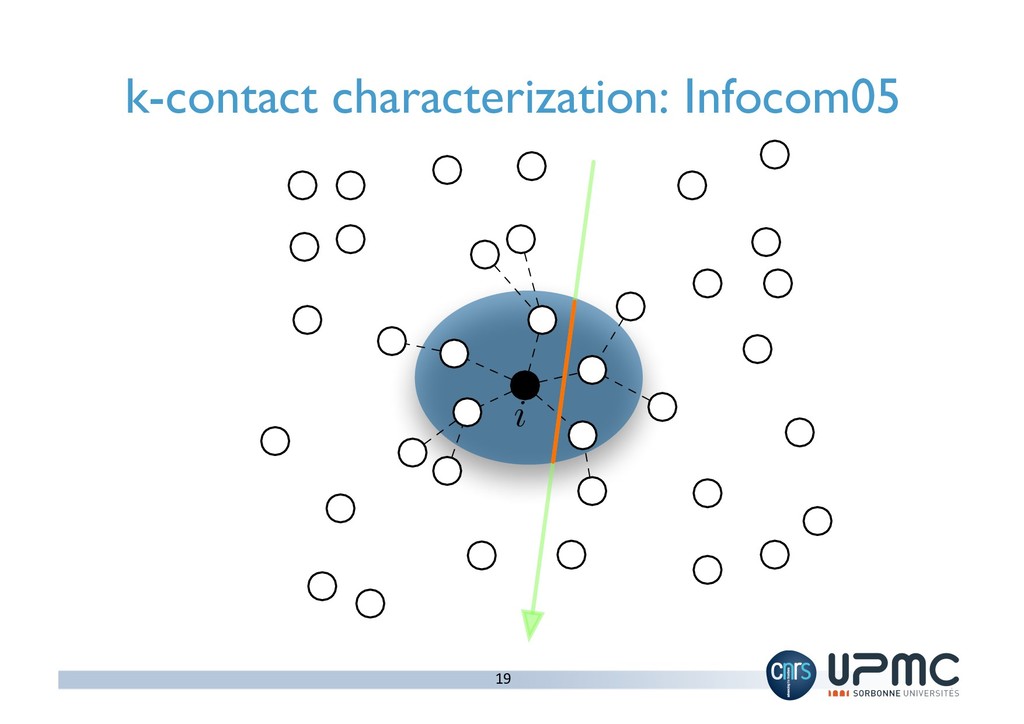
Д-contact when they dwell within each other’s Д-vicinity, with Д ˥ N∗. Д-intercontact : Two nodes are in Д-intercontact while they do not belong to each other’s Д-vicinity. 17 i j j j leaves i’s κ-vicinity (κ-intercontact starts) κ-vicinity (for κ = 2) j returns to i’s κ-vicinity (end of κ-intercontact time) i
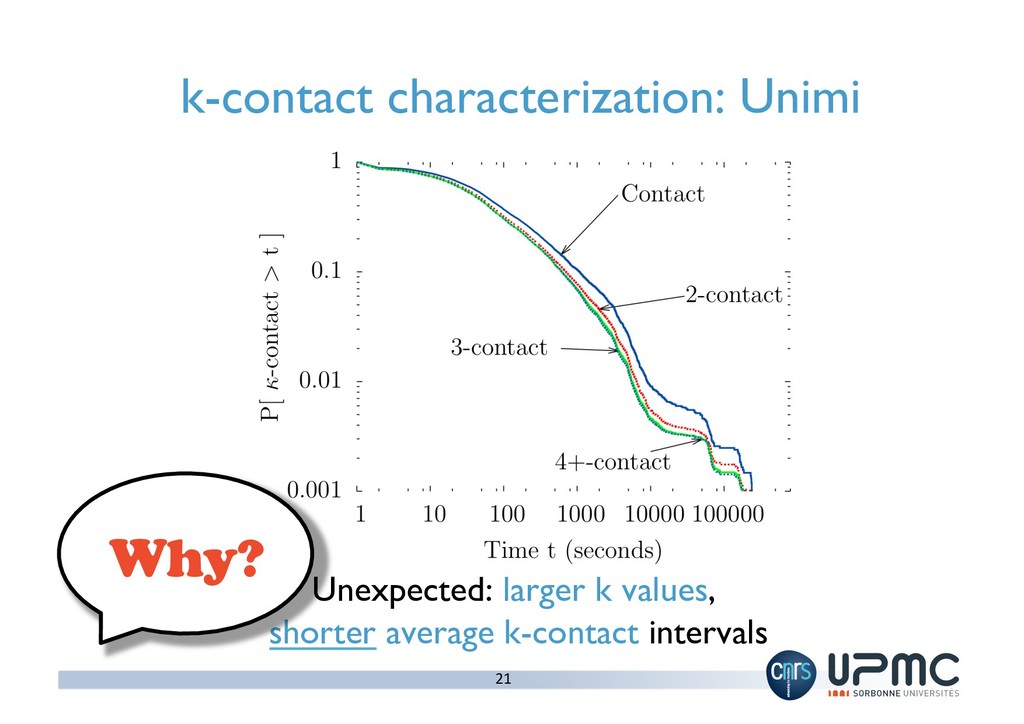
average k-contact intervals. 0.001 0.01 0.1 1 1 10 100 1000 10000 P[ κ-contact > t ] Time t (seconds) Contact Contact 2-contact 2-contact 3-contact 4-contact 5+-contact i i
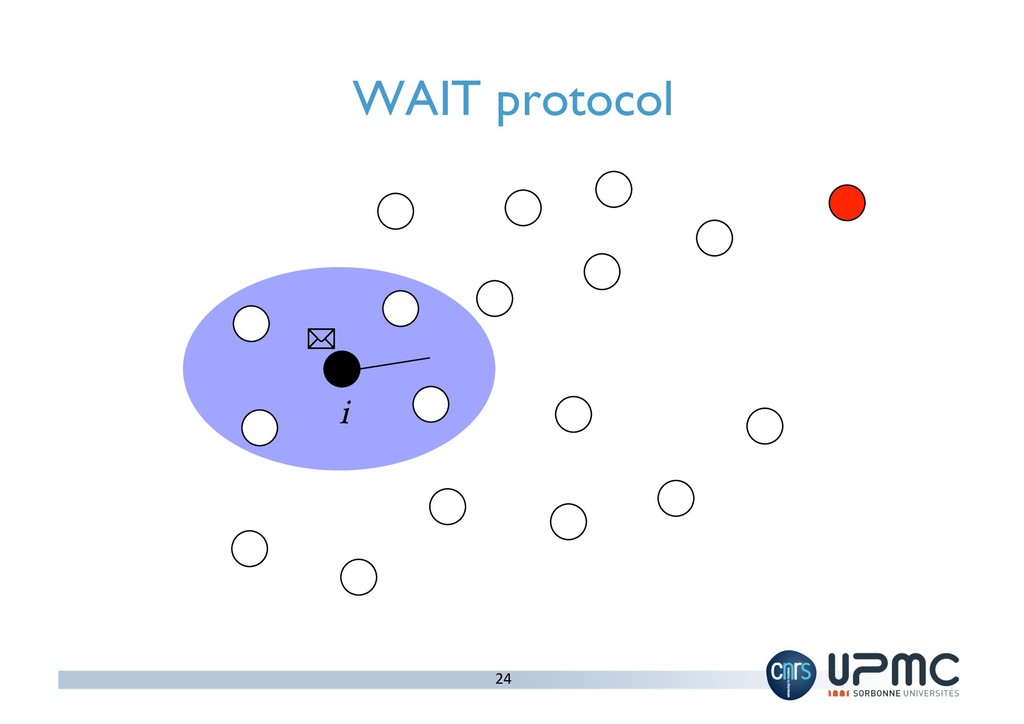
transmission until direct contact Metric – Waiting delay: the time between message creation and destination detection Performances – Generation of 10 messages at random times 23
Contribution T. Phe-Neau, M. E. M. Campista, M. Dias de Amorim, and V. Conan, “Padrões de Mobilidade de Vizinhança em Redes de Contato Intermitente,” In SBRC, Brasilia, DF, Brazil, May 2013 - Best paper candidate! T. Phe-Neau, M. E. M. Campista, M. Dias de Amorim, and V. Conan, “Examining Vicinity Dynamics in Opportunistic Networks,” In ACM MSWiM, Barcelona, Spain, November 2013. T. Phe-Neau, M. E. M. Campista, M. Dias de Amorim, and V. Conan, “Padrões de Mobilidade de Vizinhança em Redes de Contato Intermitente (extended),” In RB-RESD, accepted.
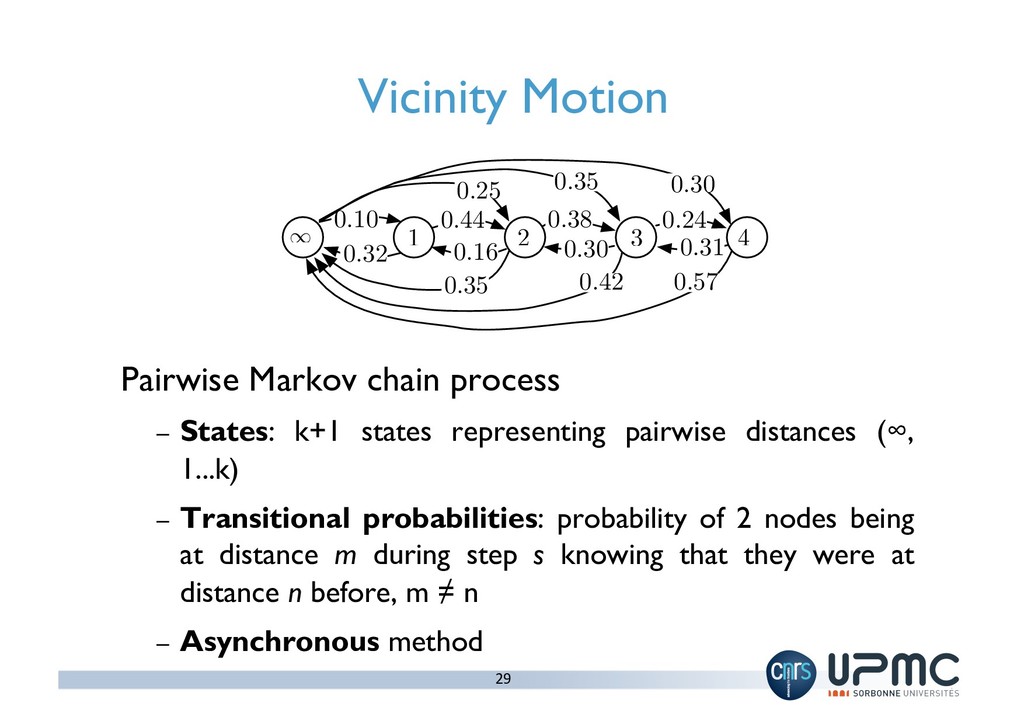
representing pairwise distances (∞, 1...k) – Transitional probabilities: probability of 2 nodes being at distance m during step s knowing that they were at distance n before, m ≠ n – Asynchronous method 0.10 0.44 0.38 0.24 0.16 0.30 0.31 1 2 3 4 ∞ 0.35 0.30 0.25 0.32 0.35 0.42 0.57 29
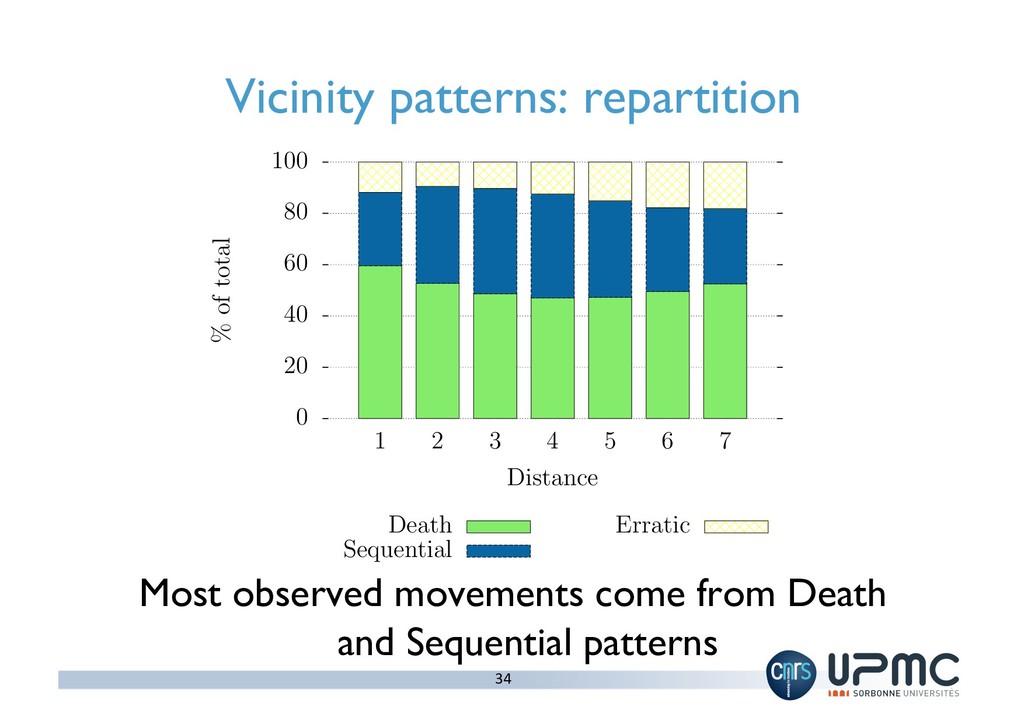
a period of k-intercontact Death – nodes departure from the κ-vicinity Sequential – the process of drifting closer or further from each other, when nodes at a distance m move to distance m-1 or m+1 Erratic 30 0.10 0.44 0.38 0.24 0.16 0.30 0.31 1 2 3 4 ∞ 0.35 0.30 0.25 0.32 0.35 0.42 0.57
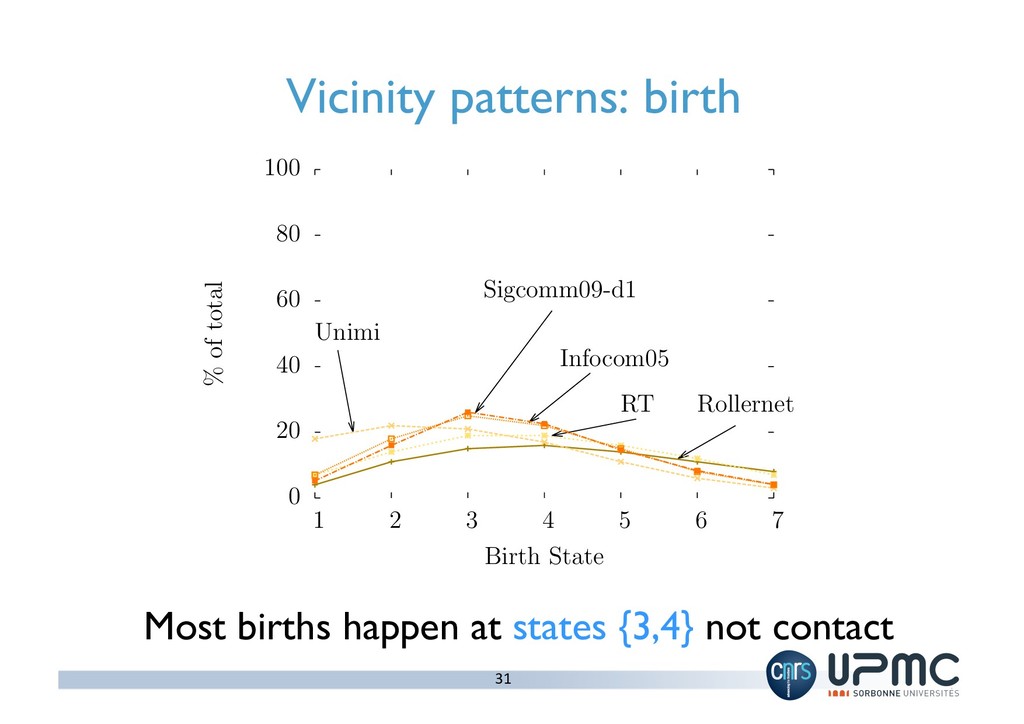
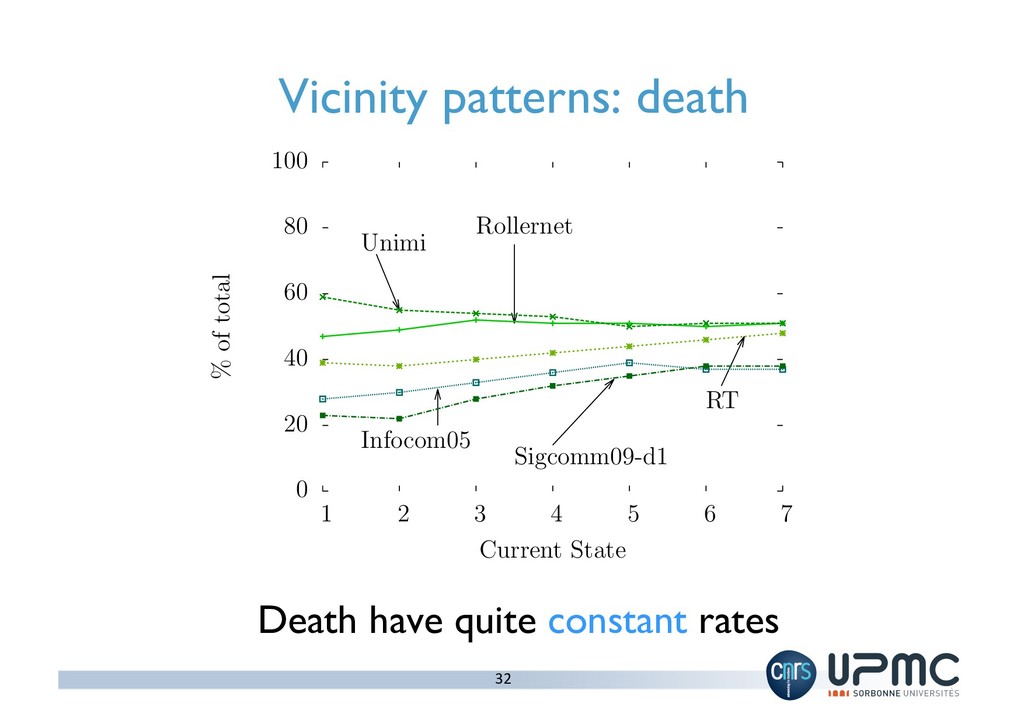
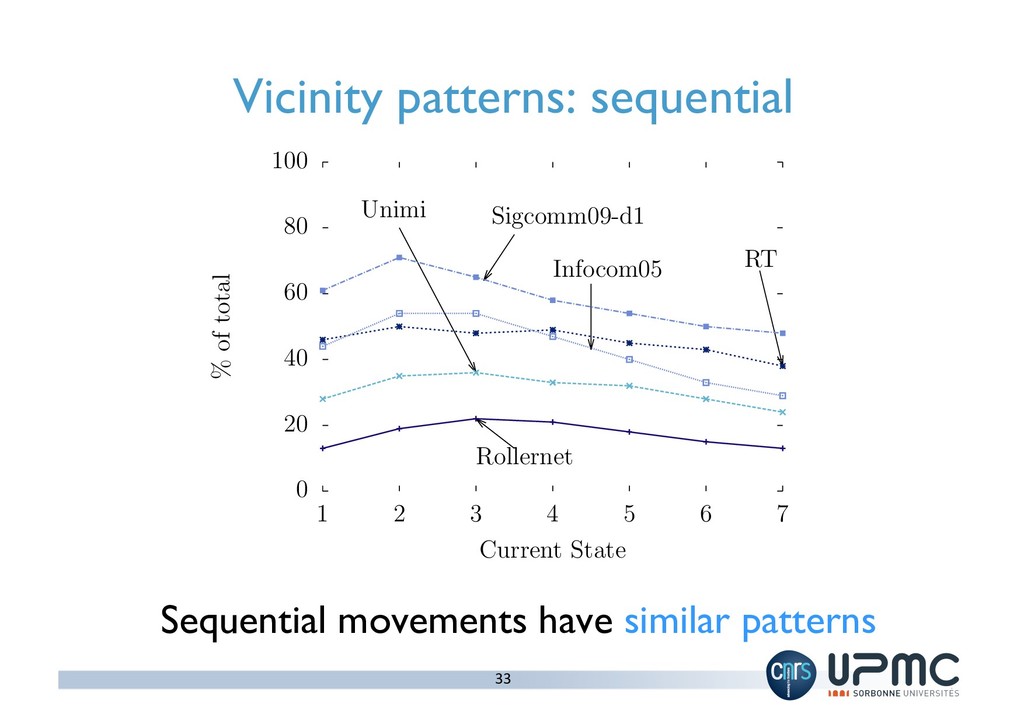
= {3,4} hops – Increases arrival detection to 46% to 72% Death – Rates remain quite constant with larger k values Sequential – A tendency to come closer – With death, represents up to 90% of observed movements 35
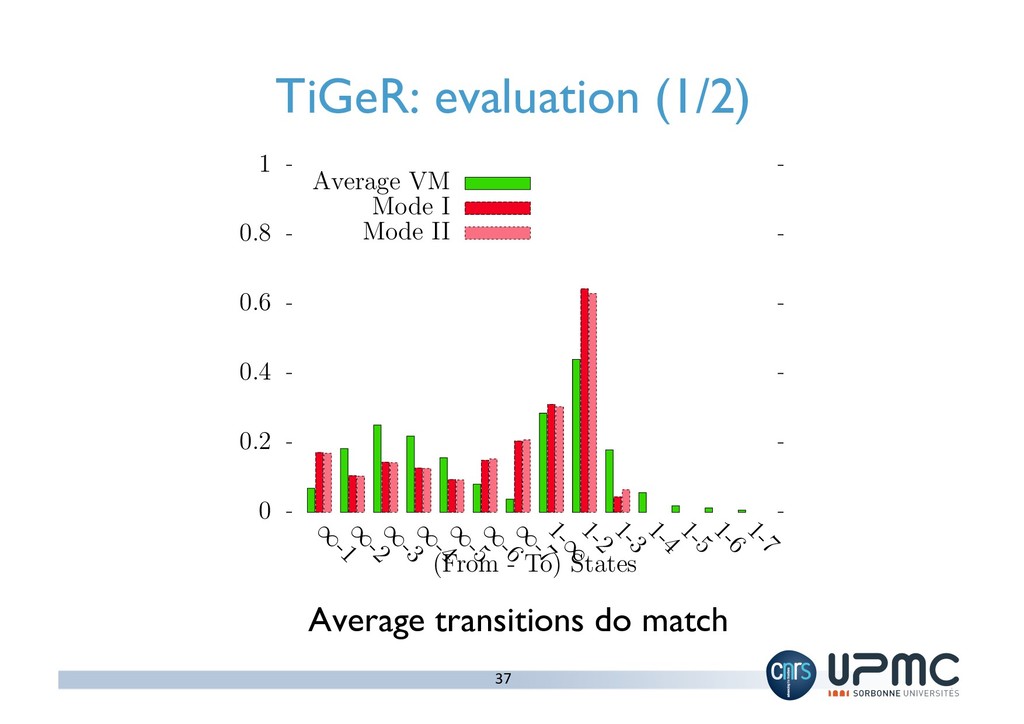
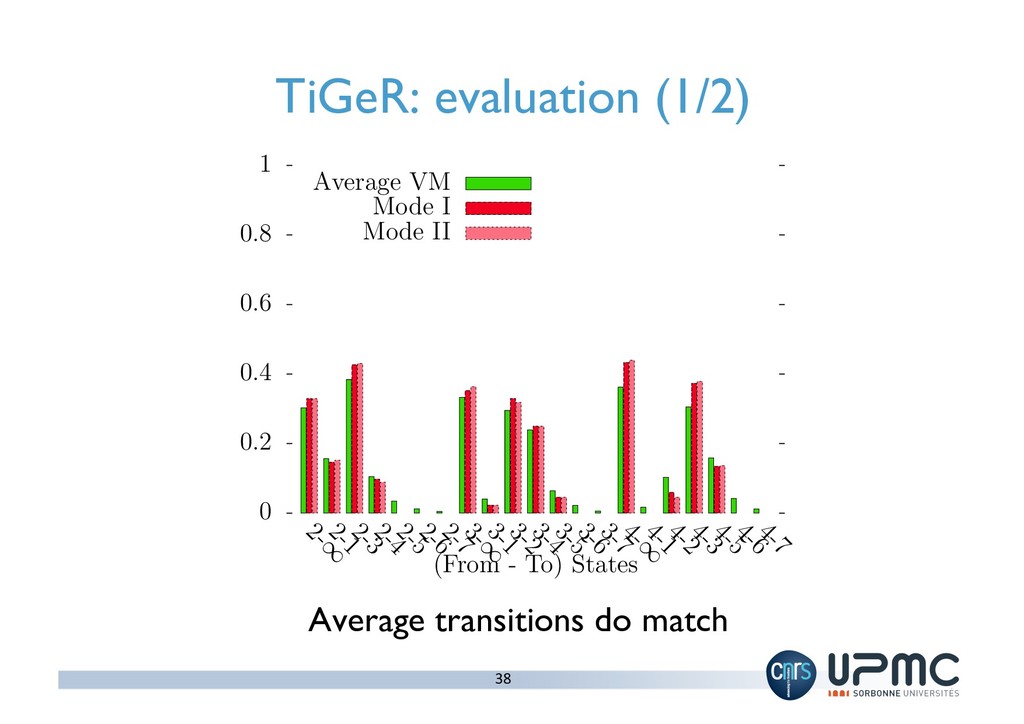
∞ -3 ∞ -4 ∞ -5 ∞ -6 ∞ -7 1-∞ 1-2 1-3 1-4 1-5 1-6 1-7 (From - To) States Average VM Mode I Mode II TiGeR: evaluation (1/2) Average transitions do match 37
5-4 5-6 5-7 6-∞ 6-1 6-2 6-3 6-4 6-5 6-7 7-∞ 7-1 7-2 7-3 7-4 7-5 7-6 (From - To) States Average VM Mode I Mode II TiGeR: evaluation (1/2) Average transitions do match 39
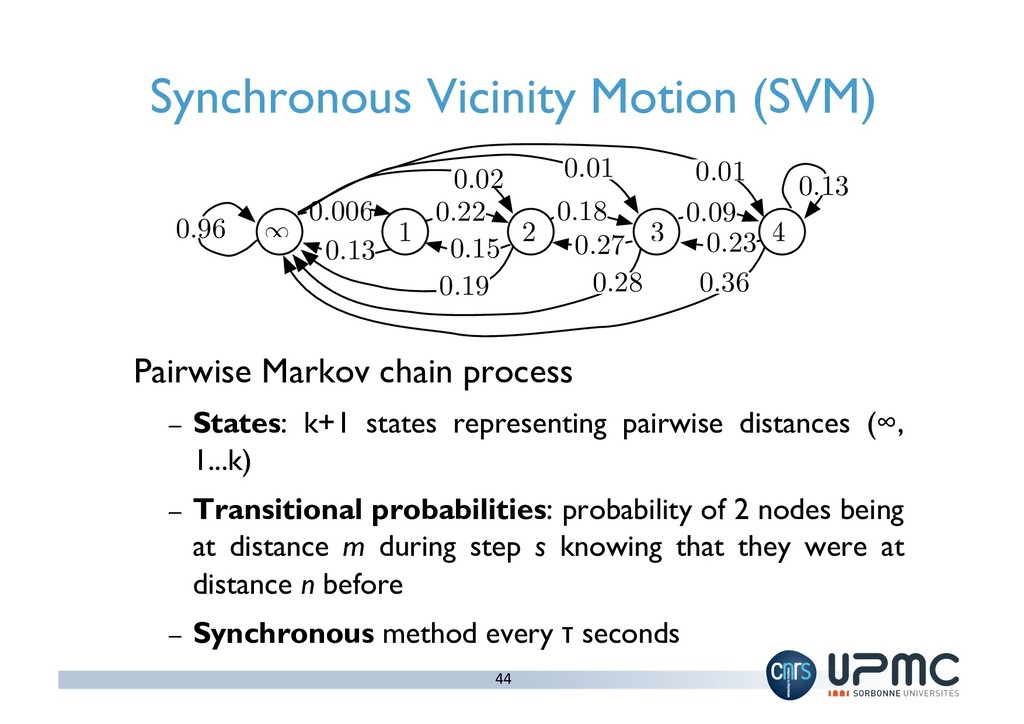
k+1 states representing pairwise distances (∞, 1...k) – Transitional probabilities: probability of 2 nodes being at distance m during step s knowing that they were at distance n before – Synchronous method every τ seconds 0.006 0.22 0.18 0.09 0.15 0.27 0.23 1 2 3 4 ∞ 0.01 0.01 0.02 0.13 0.19 0.28 0.36 0.96 0.13 44
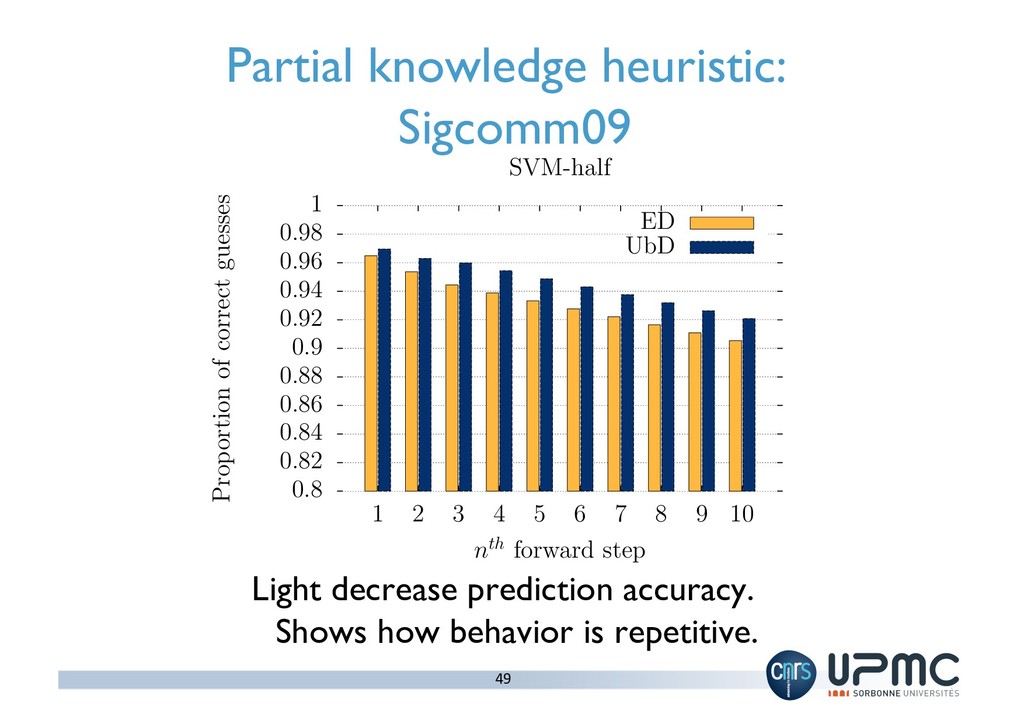
= {1...10} – Exact Distance (ED): if Sf or Ss = observed value OK! – Upper bound Distance (UbD): if Sf or Ss ≥ observed value OK! Full vs partial knowledge – SVM over full experiment – SVM over half experiment, performance test on the second half 47
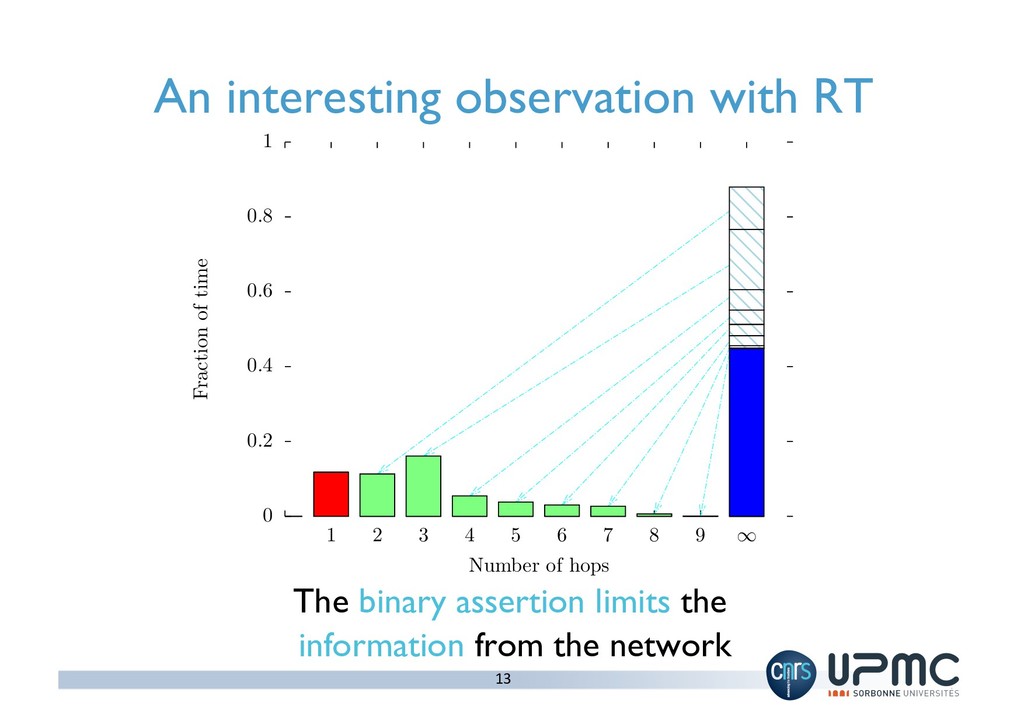
is important in DTN. k-vicinity up to {3,4} hops is enough. Vicinity Motion. Birth, death, and sequential. TiGeR generator. Predictions with the Vicinity Motion-based Heuristic. Simple with high efficiency.
V. Conan, “Caractérisation en diptyque de l’intercontact pour les réseaux à connectivité intermittente,” In Algotel, La Grande Motte, France, May 2012. T. Phe-Neau, M. E. M. Campista, M. Dias de Amorim, and V. Conan, “Padrões de Mobilidade de Vizinhança em Redes de Contato Intermitente,” In SBRC, Brasilia, DF, Brazil, May 2013. Best paper candidate! T. Phe-Neau, M. E. M. Campista, M. Dias de Amorim, and V. Conan, “Padrões de Mobilidade de Vizinhança em Redes de Contato Intermitente,” In RB-RESD, accepted. 56
V. Conan, “Fine-Grained Intercontact Characterization in Disruption-Tolerant Networks,” In IEEE ISCC, Kerkyra, Greece, June 2011. T. Phe-Neau, M. Dias de Amorim and V. Conan, “Vicinity-based DTN Characterization,” In ACM MobiOpp, Zurich, Switzerland, March 2012. T. Phe-Neau, M. Dias de Amorim and V. Conan, “The Strength of Vicinity Annexation in Opportunistic Networking,” In IEEE NetSciCom, Torino, Italy, April 2013. T. Phe-Neau, M. E. M. Campista, M. Dias de Amorim, and V. Conan, “Examining Vicinity Dynamics in Opportunistic Networks (poster),” In ACM MSWiM, Barcelona, Spain, November 2013. 57
Dias de Amorim, and V. Conan, “Analyzing and Generating Vicinity Traces,” submitted to Elsevier Ad Hoc Networks. T. Phe-Neau, M. Dias de Amorim, and V. Conan, “Uncovering Vicinity Properties in Disruption-Tolerant Networks,” submitted to Elsevier Computer Networks. A. Tatar, T. Phe-Neau, M. Dias de Amorim, V. Conan, and S. Fdida, “Beyond Contact Predictions in Mobile Opportunistic Networks,” submitted to IFIP/IEEE WONS. 58
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
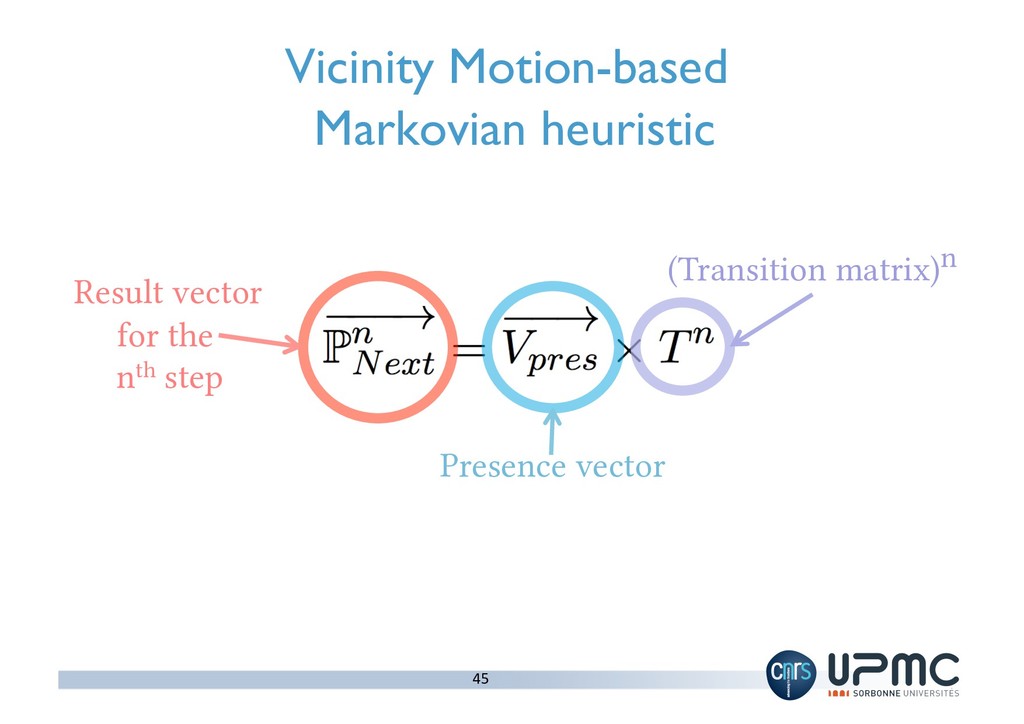
![Vicinity Motion-based Markovian heuristic 46 [0 1 0] 0,5](https://files.speakerdeck.com/presentations/b71d86da78244f32bc5c4dc17f8aeb85/slide_45.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}