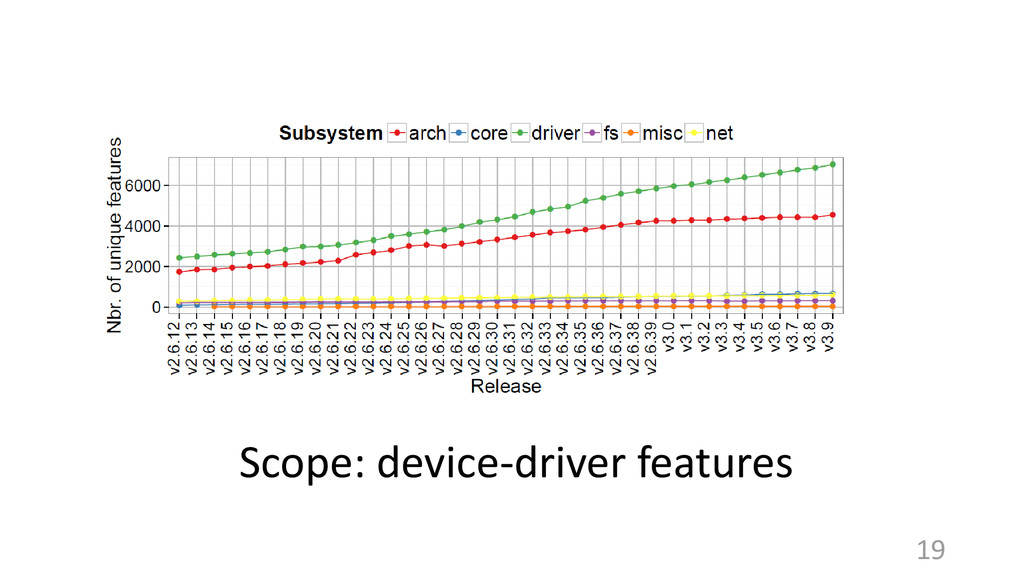
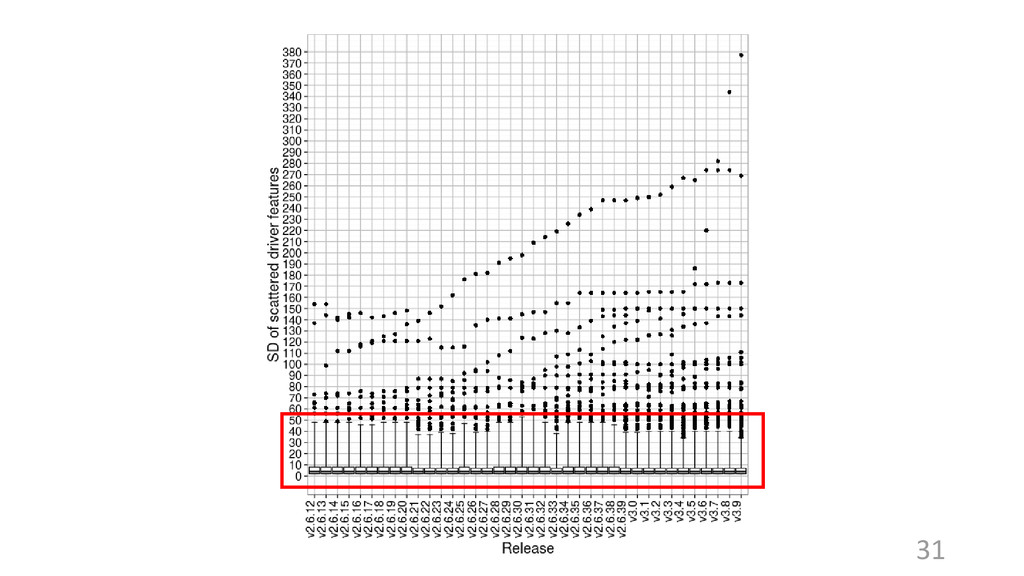
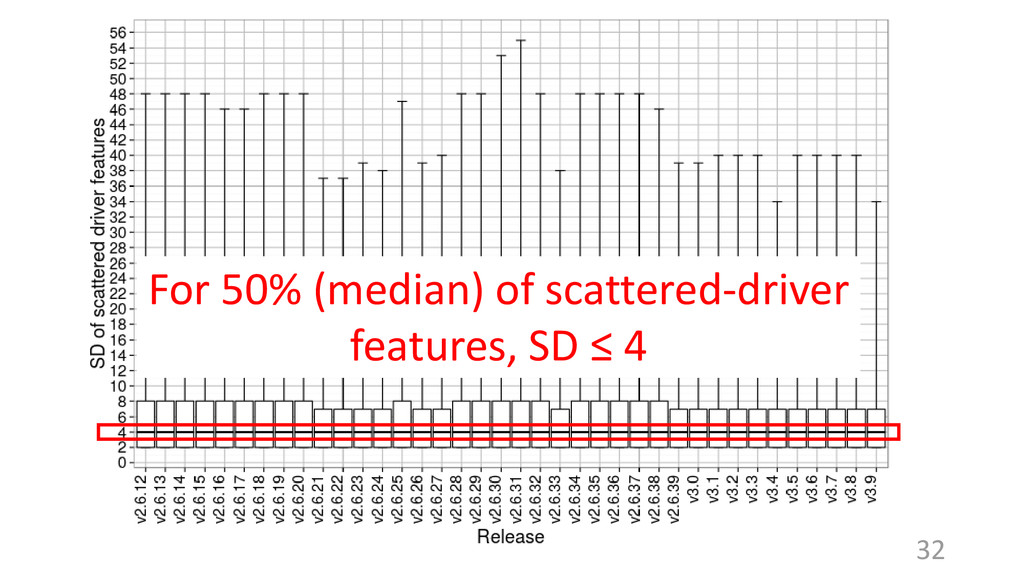
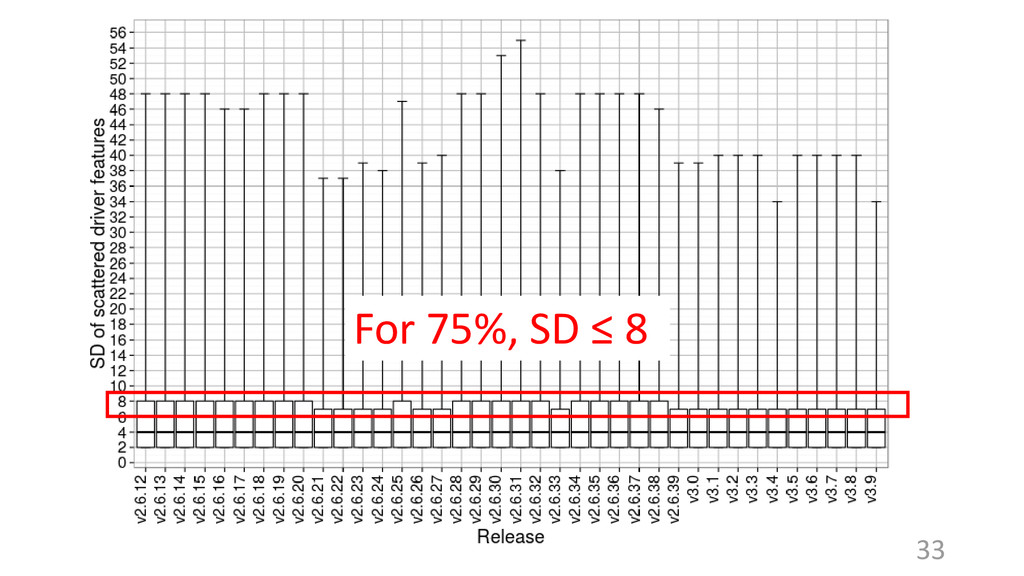
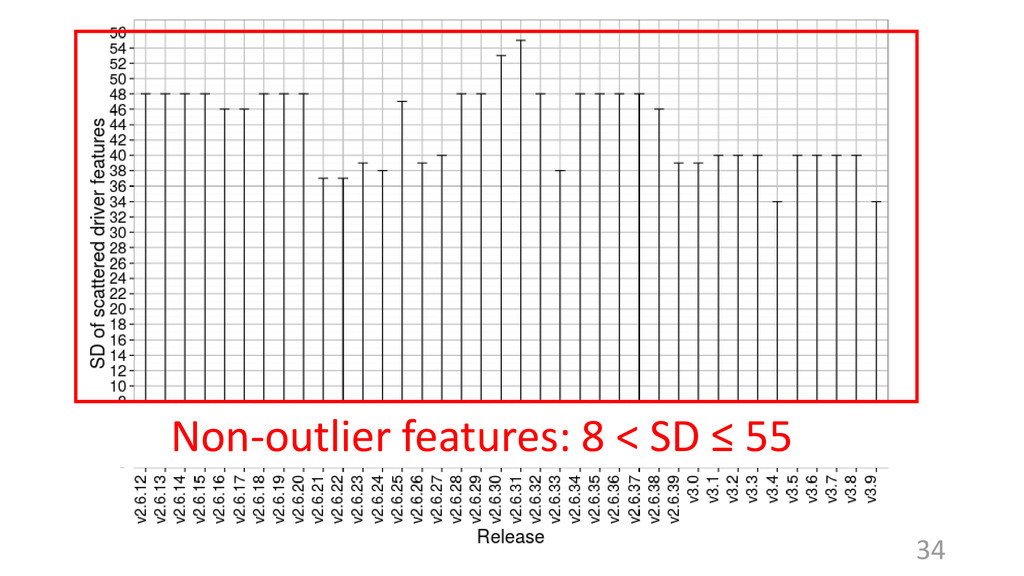
Feature code is often scattered across wide parts of the code base. But, scattering is not necessarily bad if used with care—in fact, systems with highly scattered features have evolved successfully over years. Among others, feature scattering allows developers to circumvent limitations in programming languages and system design. Still, little is known about the characteristics governing scattering, which factors influence it, and practical limits in the evolution of large and long-lived systems. We address this issue with a longitudinal case study of feature scattering in the Linux kernel. We quantitatively and qualitatively analyze almost eight years of its development history, focusing on scattering of device-driver features. Among others, we show that, while scattered features are regularly added, their proportion is lower than non-scattered ones, indicating that the kernel architecture allows most features to be integrated in a modular manner. The median scattering degree of features is constant and low, but the scattering-degree distribution is heavily skewed. Thus, using the arithmetic mean is not a reliable threshold to monitor the evolution of feature scattering. When investigating influencing factors, we find that platform-driver features are 2.5 times more likely to be scattered across architectural (subsystem) boundaries when compared to nonplatform ones. Their use illustrates a maintenance-performance trade-off in creating architectures as for Linux kernel device drivers
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}