of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 22150-22159 • 著者の所属はチャルマース工科大学(スウェーデン) とzenseact(volvoの完全子会社) スライド中の図表は特に言及のない限り論文から引用しています。 URL :https://openaccess.thecvf.com/content/CVPR2024/html/Lilja_Localization_Is_All_You_Evaluate_Data_Leakage_in_Online_Mapping_CVPR_2024_paper.html * 2
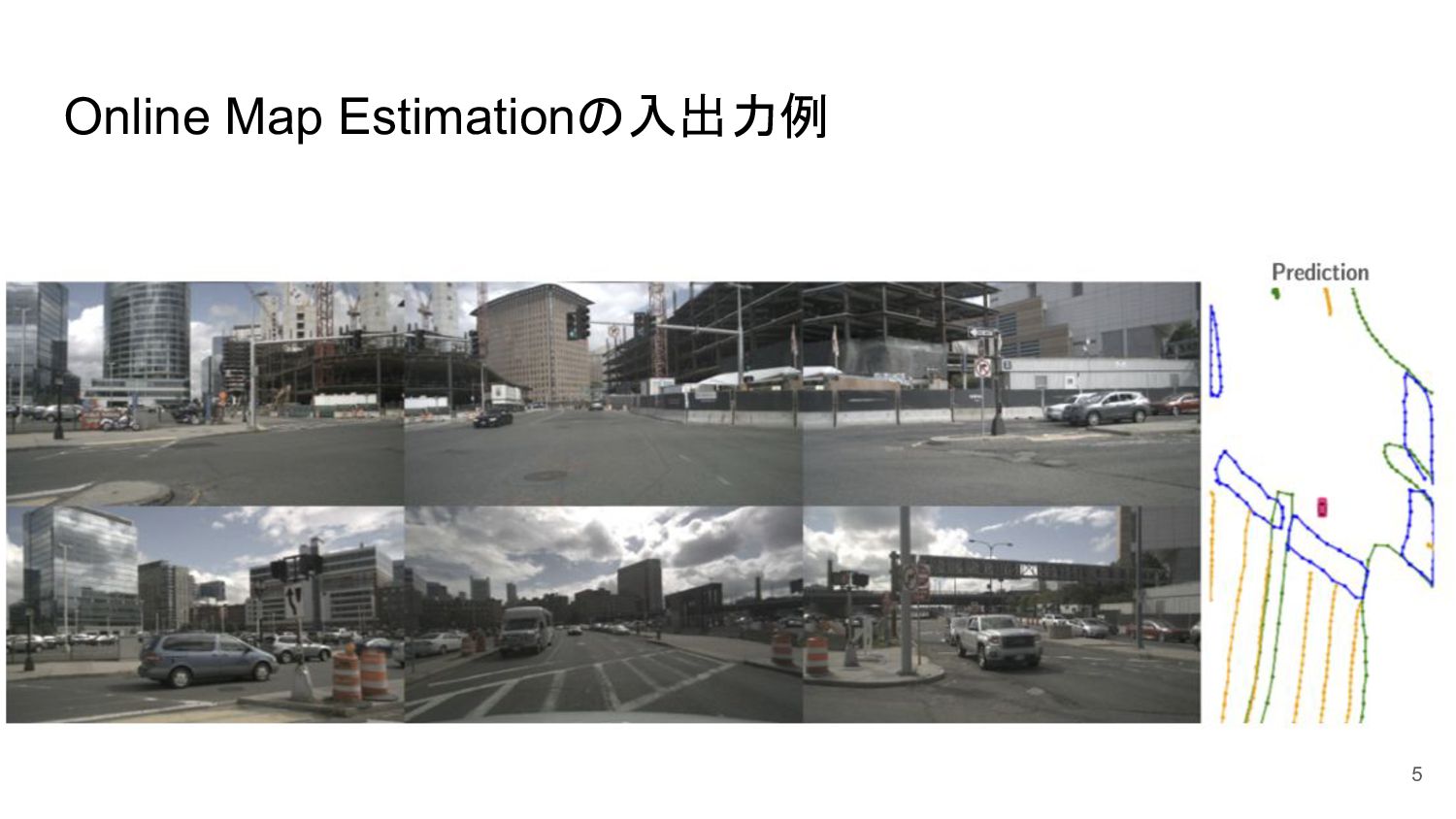
▪ 地図に変更があったら更新が必要 ▪ 事前に地図を取得している地域でしか走れない • Online Map Estimation ◦ センサー入力から直接周辺の情報を推定する ▪ チャレンジングだが、事前の情報なしで走るためには必須 ▪ 「人間的」なアプローチ • We briefly barked up the tree of high precision lane line [maps], but decided it wasn't a good idea. -- Elon Musk 4
the parser ◦ https://drive.google.com/file/d/1VodGljuEhBKwZIXQwN-ApH6g2wBAVAdK/view ◦ “ Identify your real tasks” • End to End というので何とかしてくれるらしい • Vapnikの原理 ◦ 「ある問題を解くとき,その問題よりも難しい問題を途中段階で解いてはならない」 22
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
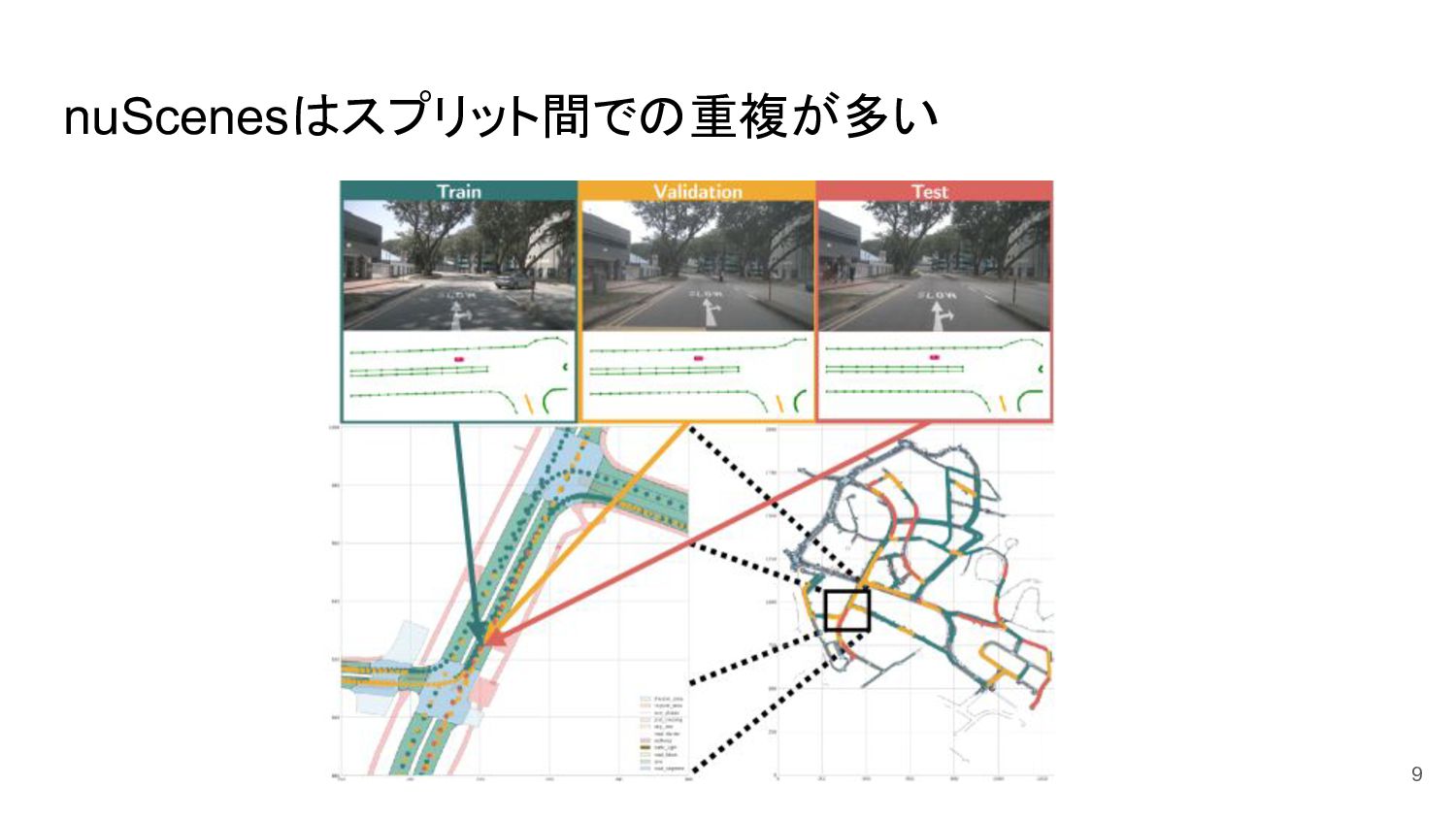
![先行研究で提案されていたスプリットは? 先行研究では、適切なtrain/val/testに分けたものを提案できていなかった • Roddick and Cipolla [2020]でこの問題は指摘されていた ◦ しかし新しいtrain/val/test を提案はしていない](https://files.speakerdeck.com/presentations/1f003e14b2e24febaeda7171713b7da4/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}