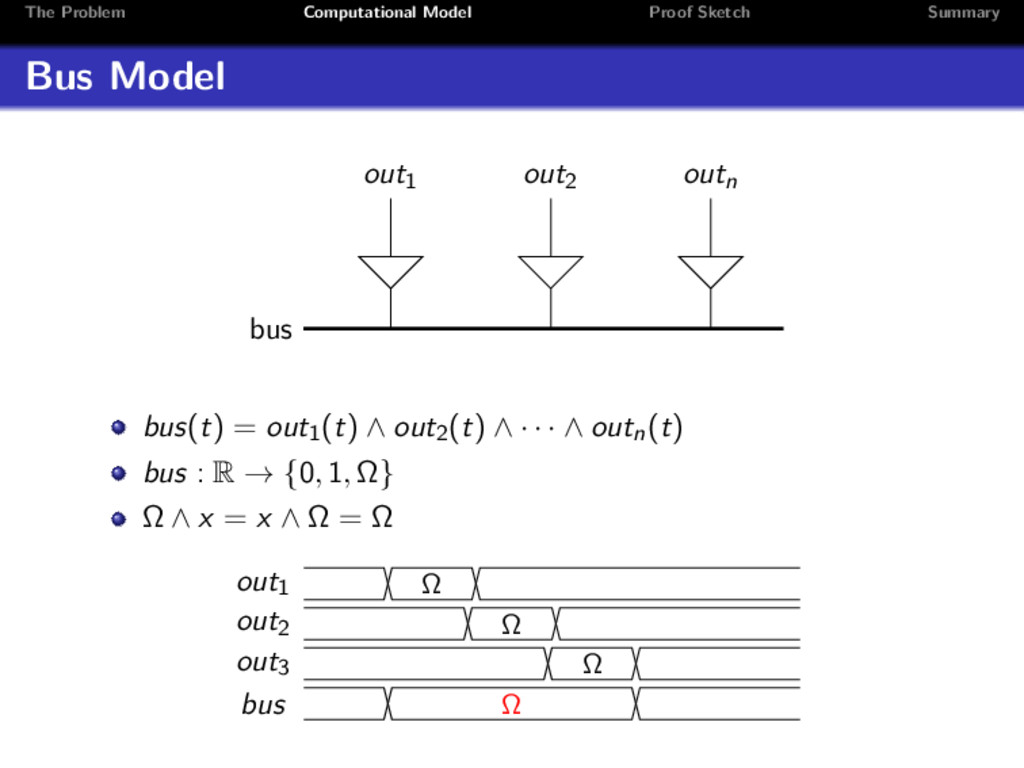
time violation at synchronization: Case 1: incorrectly sampled ⇒ 1 cycle delay Case 2: correctly sampled ⇒ no delay (was missing) not discovered because only 1 round treated αu (r, s) defined by the automata state was verified: eu (αu (r, s)) ≤ esend(s) (αsend(s)(r,s) (r, s) + off ) needed: eu (αu (r, s) + 2) ≤ esend(s) (αsend(s)(r,s) (r, s) + off + 2) technical problem with substitution of infinite sequences in Isabelle glitches at (inactive) send register out1 out2 out3 bus Ω Ω Ω Ω
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}