al. (2011), Traa & Smaragdis (2013)] using Kalman filters [Ward et al. (2003), Lu & Cooke (2011)] using particle filters Head rotations can improve localisation by resolving front-back ambiguities (see [Wallach (1940), Blauert(1997)]). 2 / 9
al. (2011), Traa & Smaragdis (2013)] using Kalman filters [Ward et al. (2003), Lu & Cooke (2011)] using particle filters Head rotations can improve localisation by resolving front-back ambiguities (see [Wallach (1940), Blauert(1997)]). Computational models investigating the effects of head movements: [Schymura et al. (2014), May et al. (2015), Ma et al. (2015)] 2 / 9
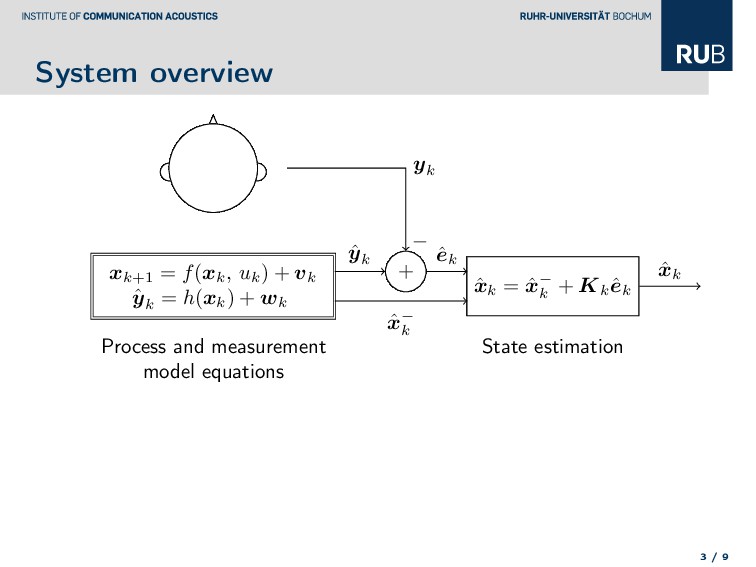
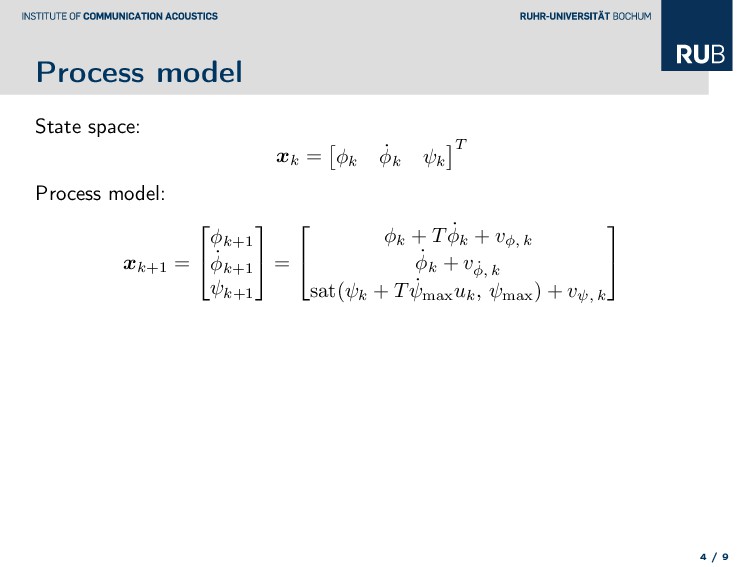
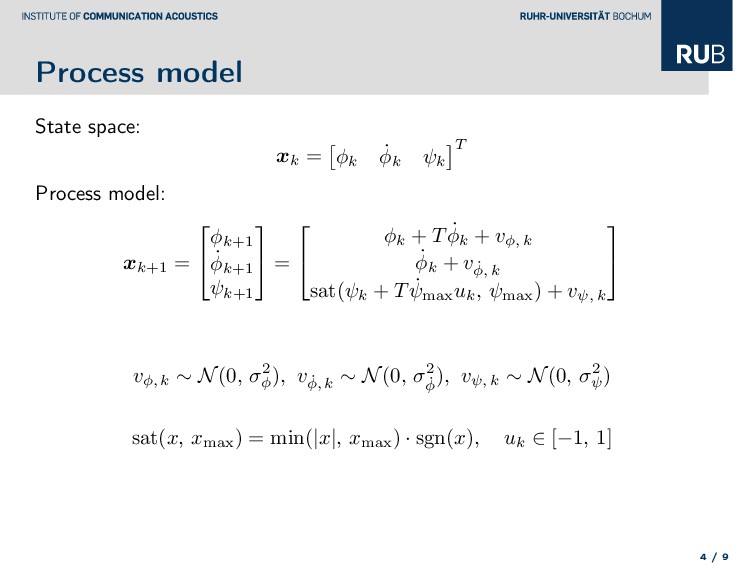
ˆ yk = h(xk ) + wk + ˆ yk yk − Process and measurement model equations ˆ xk = ˆ x− k + Kk ˆ ek ˆ ek ˆ x− k State estimation uk = g(ˆ xk ) ˆ xk Controller • uk 3 / 9
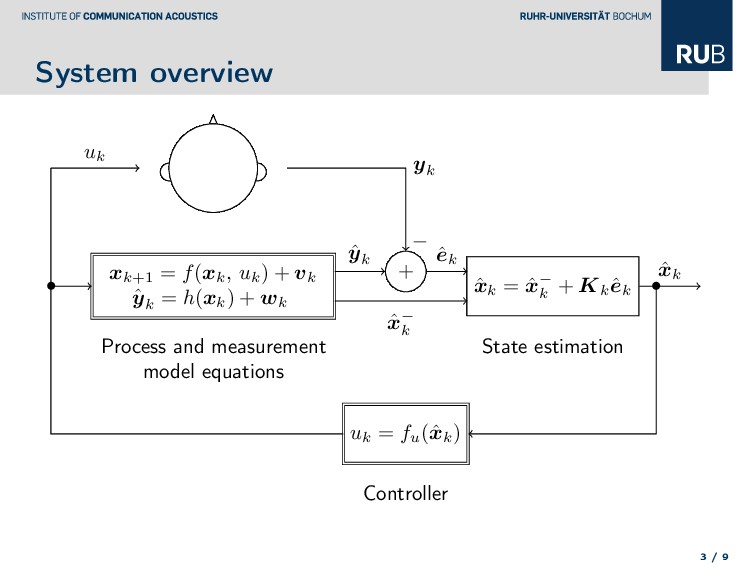
ˆ yk = h(xk ) + wk + ˆ yk yk − Process and measurement model equations ˆ xk = ˆ x− k + Kk ˆ ek ˆ ek ˆ x− k State estimation uk = fu (ˆ xk ) ˆ xk • Controller • uk 3 / 9
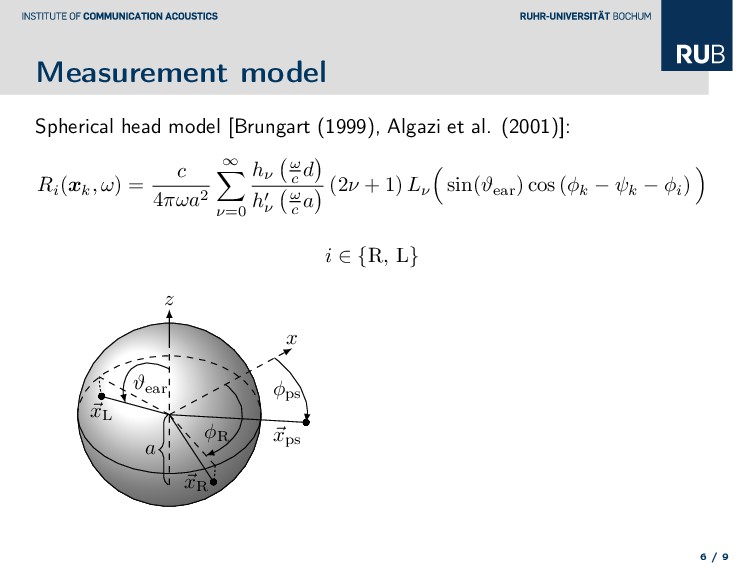
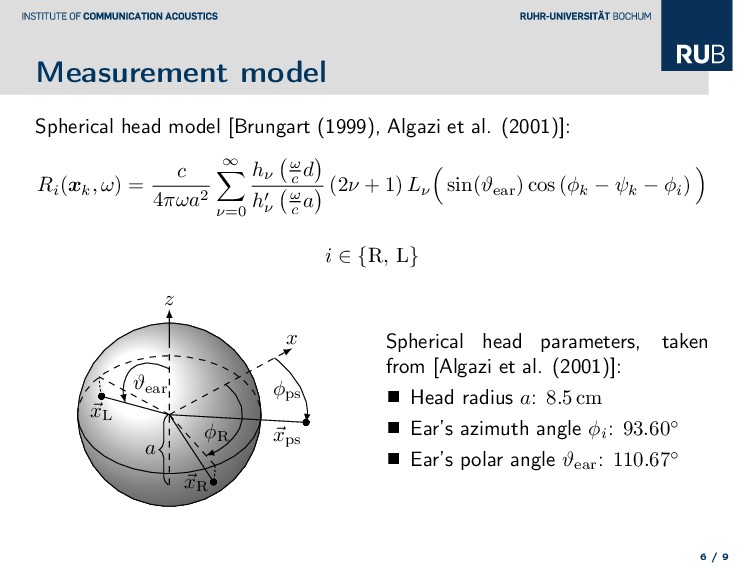
(2001)]: Ri (xk , ω) = c 4πωa2 ∞ ν=0 hν ω c d hν ω c a (2ν + 1) Lν sin(ϑear ) cos (φk − ψk − φi ) i ∈ {R, L} a xL ϑear xR φR xps φps z x Spherical head parameters, taken from [Algazi et al. (2001)]: Head radius a: 8.5 cm Ear’s azimuth angle φi : 93.60◦ Ear’s polar angle ϑear : 110.67◦ 6 / 9
sound sources using continuous head rotations was proposed. The model allows for treating the localisation task as a closed-loop control problem. 9 / 9
sound sources using continuous head rotations was proposed. The model allows for treating the localisation task as a closed-loop control problem. Future extensions of the model may aim at investigating alternative control strategies, estimation of source distance and introducing additional degrees of freedom (e.g. translatory movements). 9 / 9
sound sources using continuous head rotations was proposed. The model allows for treating the localisation task as a closed-loop control problem. Future extensions of the model may aim at investigating alternative control strategies, estimation of source distance and introducing additional degrees of freedom (e.g. translatory movements). Thank you for your attention! 9 / 9
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Evaluation results Source position [deg] 30 60 90 120 150](https://files.speakerdeck.com/presentations/f7ecf5f6ef3a4b95a23bdd54dedfa732/slide_14.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}